ROS智能车创新性实验设计及教学应用
2023-09-13王雨蒙郑晋军
王雨蒙, 王 欣, 朱 冰, 郑晋军
(吉林大学a.汽车工程学院;b.机械与航空航天工程学院,长春 130022)
0 引言
随着新一轮科技革命和产业变革的不断深化,智能汽车已成为汽车产业发展的战略方向,代表着未来汽车技术的战略制高点。智能汽车装配有先进的车载传感器、控制器、执行器,具备复杂环境感知、规划决策、智能控制等功能,可实现不同等级的自动化驾驶,是未来汽车新技术集成的载体,代表着未来汽车科技的战略制高点[1-2]。
为了推动智能汽车的发展,世界各国的高等教育机构均大力进行智能汽车领域专业人才的培养,推出了多种创新性实验课程[3]。然而,我国在智能汽车人才培养方面仍然深受科学范式和技术范式的影响,过于注重理论教学,缺少能够有效提高学生实践能力和创新能力的实验课程。智能汽车教学应顺应时代的发展,响应国家汽车智能化的发展战略,不断推陈出新,侧重培养学生的实践能力和创新能力,为国家输送智能汽车新工科人才,推动新时代下新工科教育的新理念、新结构、新模式、新质量和新体系转变[4]。
培养学生实践能力和创新能力的有效手段是进行创新性实验教学[5]。然而在智能汽车实验教学中所采用实车教学平台价格昂贵、危险性高,虽然能够使学生更加直观地了解智能汽车,但由于人均操作时间不足、系统复杂度高,难以产生良好的教学效果。同时,自2020 年以来,疫情持续肆虐,使线上教学成为新常态,增加了开展各类实验课程的难度。为此,本文充分利用我校汽车工程学院、汽车仿真与控制国家重点实验室已有的教学、科研成果,设计机器人操作系统(ROS)智能车创新性实验课程。ROS 智能车可以理解为智能汽车的微缩、简化版本,具有体积小、易于控制和学习、安装操作简单、便于携带等特点,在使用过程中安全性和稳定性高,能够避免学生在实践中发生危险,可广泛应用于汽车智能化技术等相关课程的实践教学。
目前,国内高校针对本科生的ROS智能车实验课程仍处于探索阶段,ROS 智能车创新性实验可为建设智能汽车实验教学课程和体系提供帮助和指导。
1 ROS智能车
ROS智能车如图1(a)所示,其长度25 cm,宽度19 cm,高度18 cm,质量约2 kg,最大行驶速度2 m/s,其主要结构如图1(b)所示。
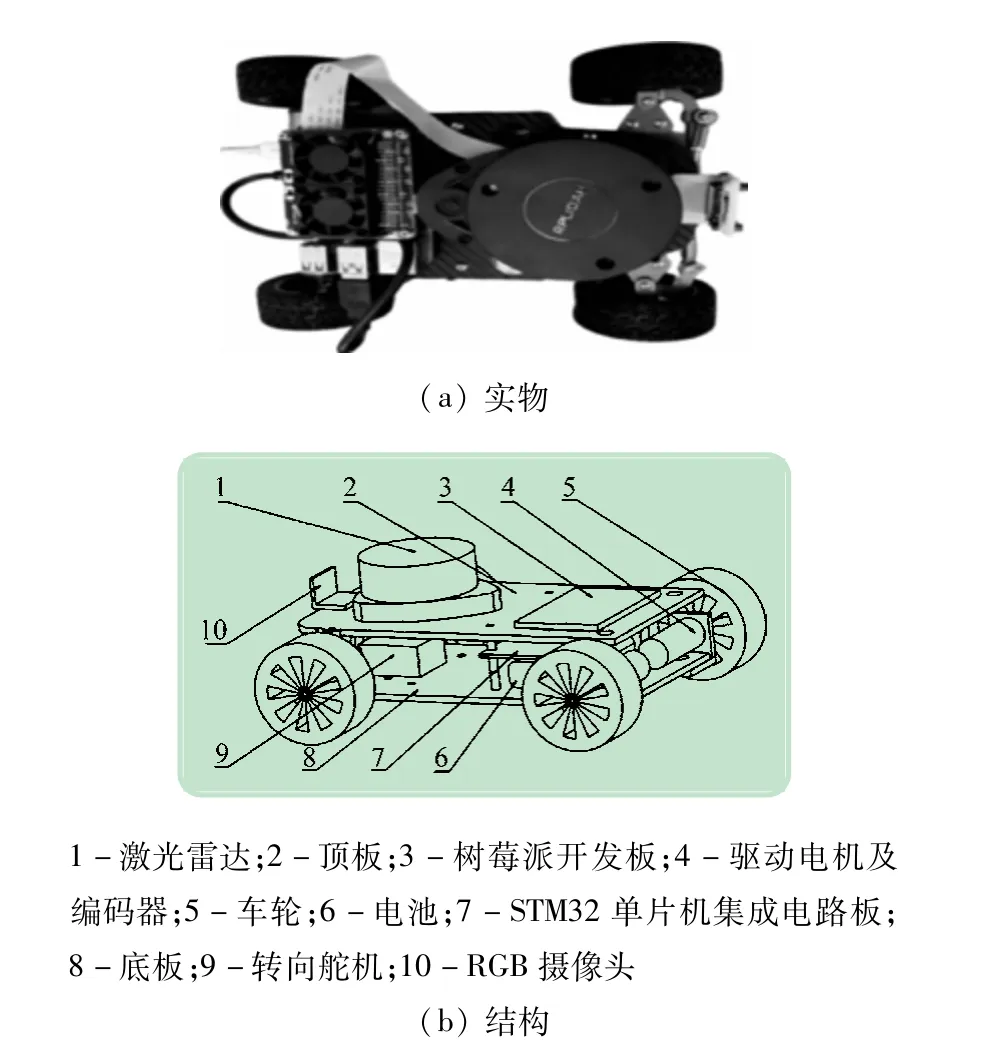
图1 ROS智能车
1.1 ROS智能车工作原理
ROS智能车各部件的关系和控制原理如图2 所示,ROS智能车主要通过单片机驱动车轮行驶,在行驶过程中通过雷达、位姿传感器、摄像头等感知设备采集的数据对环境和车辆位置进行估算,从而通过存储的程序对车辆行驶路线进行调整。
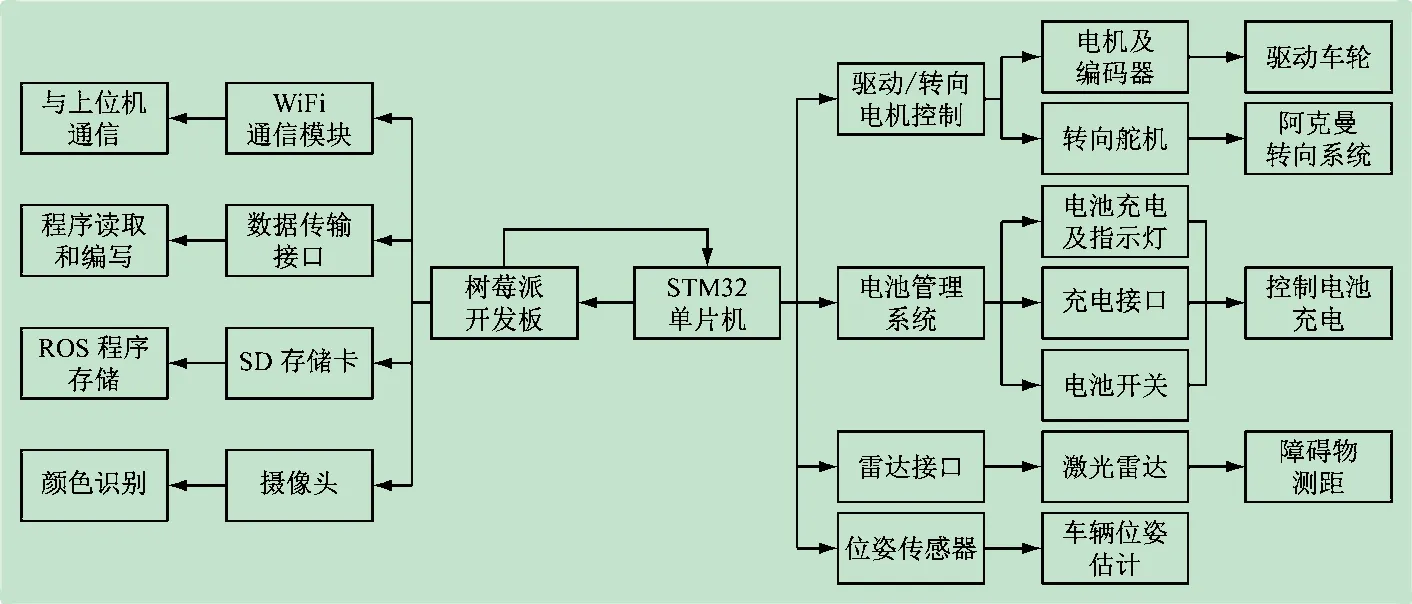
图2 ROS智能车各部件的关系和控制原理
1.2 ROS智能车功能及算法
(1)建图和自动驾驶功能。行驶中用slam_gmapping节点和位置节点分别监听摄像头、激光雷达、姿态传感器发布的话题[6],通过启动slam_gmapping节点和位置节点之间互相监听话题进行回环检测,准确识别空间的边界和空间中的障碍物[7]。通过自适应蒙特卡洛定位算法对ROS 智能车行驶时的实际位置进行精确的估计和计算[8]。在地图上确定目标点之后,首先通过全局路径规划算法规划出一条最优的全局路径,当ROS智能车在行驶过程中遇到突发障碍时,再通过局部路径规划算法实现避障,从而实现自动导航[9]。全局路径规划算法采用A*算法[10],在搜索过程中通过建立预估函数判断优先搜索节点。局部路径规划算法采用动态窗口法(Dynamic Window Approach,DWA),DWA 主要是在速度空间中采样多组速度,并模拟ROS智能车在这些速度下一定时间内的轨迹,在得到多组轨迹以后,对这些轨迹进行评价,选取最优轨迹所对应的速度来驱动ROS智能车运动。
(2)巡线行驶和车道线识别功能。利用OpenCV图像处理技术对摄像头传输的图像进行处理,首先将红绿蓝色彩模式(RGB)图像转化为HSV图像,通过图像处理程序中对色调(H)、饱和度(S)、透明度(V)的阈值进行设定,再对HSV 图像进行分割识别,即可对不同颜色的车道线进行自动检测和追踪[11]。对图像中车道线上某设定点与图像中心位置的水平值与高度值进行差值计算,图像高度差值控制车辆前进,水平差控值制车辆转向,当差值均为0 时,ROS 智能车停止[12]。
2 ROS智能车实验课程设计
ROS智能车课程组在通过几轮的实验教学应用和改进后,形成了一套较为完整的实验教学体系。课程共分为3 次课,共计6 学时,如表1 所示。第1 次课以老师讲解为主,让学生了解智能汽车的发展历史及现状,并对智能车功能和算法进行介绍;第2 次课以学生操作为主,让学生对ROS智能车进行实际操作和控制,熟悉控制指令并控制ROS智能车各功能节点的开启与运行;第3 次课分为两个实验项目,第1 个是自动导航实验,要求在特定场景下控制ROS智能车进行环境建图并实现自动导航,第2 个是自动巡线实验,要求使ROS智能车在铺设好的路面上进行寻线行驶。
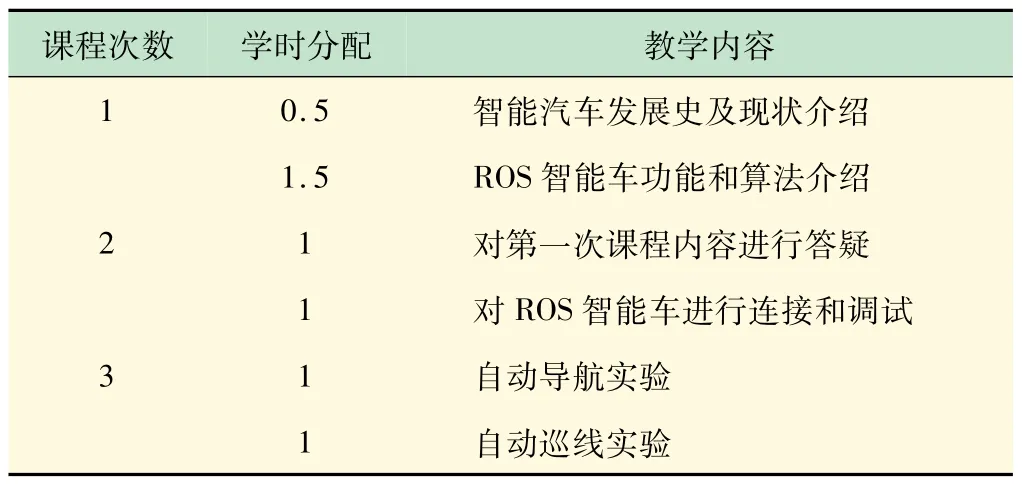
表1 ROS智能车创新性实验学时分布
在6 个学时之外还设计有开放性自主实验,学生通过对ROS智能车结构和控制代码的学习,利用课余时间对智能车进行自主实验。
2.1 自动导航实验
学生根据实验指导书中的实验流程,按步骤操作ROS智能车进行建图和自动驾驶实验,实验流程如图3 所示,主要为:①ROS 智能车通电后通过电脑与智能车的无线网络进行连接;②在上位机上启动乌班图(Ubuntu)系统,通过nfs 网盘加载ROS 智能车的控制程序;③在上位机输入指令启动智能车底盘驱动、激光雷达等功能节点;④启动3D 可视化工具RVIZ 模块,并打开arbotix 插件控制智能车移动,检查智能车的雷达和驱动系统是否正常工作;⑤将智能车放入想要建图的场地中;⑥启动slam_gmapping功能节点,可通过电脑、手机、平板等设备控制ROS 智能车在场地内移动,对周围环境进行建图;⑦查看地图建立是否完整和准确,并对建立的地图进行存储;⑧在地图的任意处放置ROS 智能车,并在地图中标记好ROS 智能车起始位置,然后选定自动导航的终点位置以及姿态;⑨在预计的行进路线上设置新的障碍;⑩在RVIZ中查看规划的全局路径和局部路径,观察ROS智能车能否对设置的障碍进行避障,并准确到达设置的终点位置。
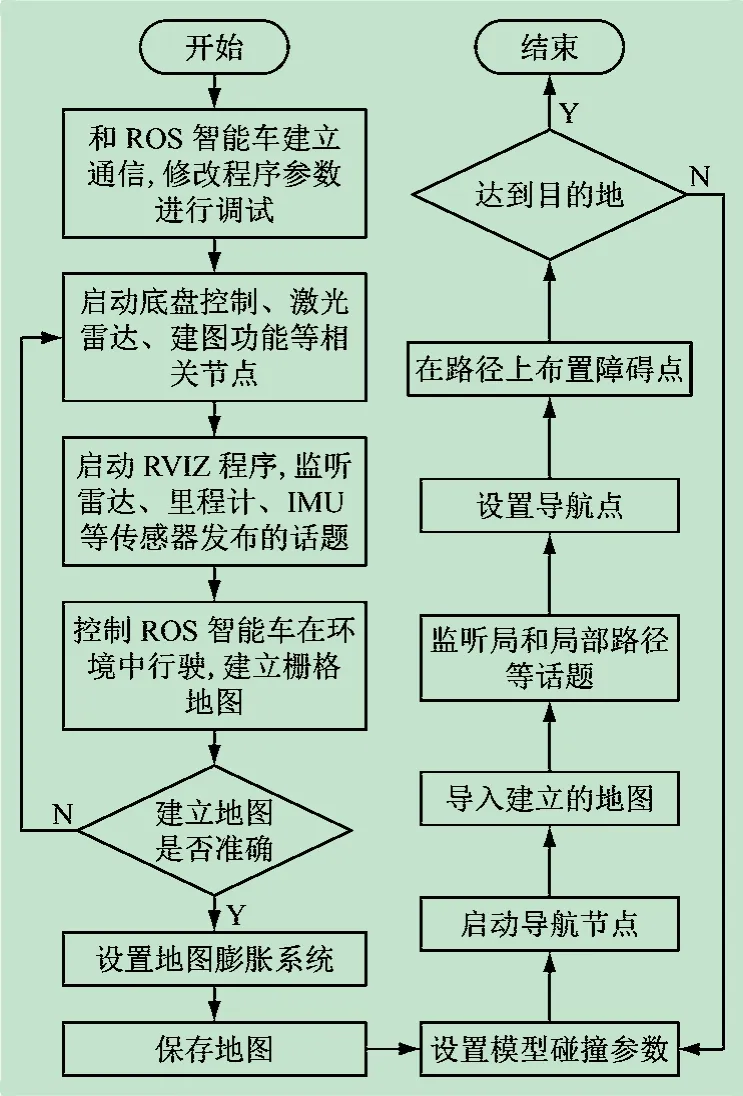
图3 自动导航实验流程
2.2 自动巡线实验
自动巡线实验的流程如图4 所示,主要为:①启动ROS智能车电源,通过电脑与智能车无线网进行连接;②在上位机启动Ubuntu系统,在命令栏中输入指令加载智能车的nfs 网盘;③设定追踪颜色范围的阈值;④启动底盘驱动和摄像头功能节点;⑤将ROS智能车放入铺设好的线路中;调整摄像头角度,使车道线位于摄像头识别范围内;⑥启动巡线功能,观察ROS智能车驱动轮和转向轮是否正常工作,是否巡线成功。
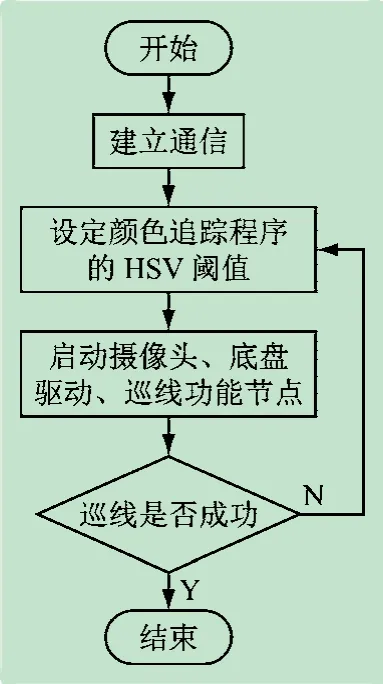
图4 自动寻线实验流程
2.3 开放性自主实验
实验环境为宽约50 cm 总长约30 m 的环形ROS智能车赛道,要求学生利用ROS智能车的车道识别功能和前期所学的相关知识,在教师的简单指导下鼓励学生发挥主观能动性,以2 或3 人小组为单位设计实验流程,每个小组独立对ROS智能车驱动电动机和转向舵机的PID参数进行修改和优化[13],得到最快通过赛道且不破坏汽车操纵稳定性的最优值。自主实验环节主要通过进一步增加智能车的实操环节使学生将学到的内容活学活用,从而加深对智能车课程的理解。
3 ROS智能车实验在教学中应用
ROS智能车创新性实验已作为实验课嵌入汽车智能化技术课程完成实验教学。汽车智能化技术是我校首门面向本科生系统讲授智能网联汽车相关知识的课程,已增设为2013 版学校车辆工程专业培养方案中规定的基础课。该课程每年选课人数超过100 人,从2017 年起,课程逐步融入了ROS智能车的实验内容。
3.1 教学应用成果
ROS智能车创新性实验作为汽车智能化技术课程的实验课已连续开展5 年,教学情况统计如表2 所示,共计有602 名学生参与实验。ROS 智能车创新性实验中的开放性自主实验教学情况统计如表3 所示,除开设课程的汽车工程学院之外,还吸引到通信工程学院和仪器科学与电气工程学院的学生参与到开放性自主实验中来。

表2 汽车智能化技术实验课教学情况

表3 开放性自主实验教学情况
学生在自动导航实验中使用gmapping 功能得到的栅格地图如图5 所示。设定好目的地后上位机显示的ROS智能车行驶的全局规划路径(红色线)和局部规划路径(绿色线)如图6 所示。在自动巡线实验中,通过上位机观察ROS智能车摄像头识别的图像如图7所示,在行驶时车辆中轴线上的预测点(红点)偏离车道中心线(黑线)时,自动控制车辆回正,使车辆保持在车道内。

图5 学生建立的环境地图

图6 自动导航实验中的规划路径

图7 自动巡线实验中的识别图像
学生在开放自主性实验中得到的测试结果数据如表4 所示。学生通过实验得出结论:当驱动电动机和转向舵机的积分系数(Ki)和微分系数(Kd)值偏小时,ROS 智能车在直行和转弯时的车速和车轮转弯响应时间变大,从而使ROS 智能车跑完赛道时间偏长;反之,当驱动电动机和转向舵机的Ki和Kd值偏大时,ROS 智能车在直行和转弯时的车速和车轮转弯响应时间过快,容易使ROS 智能车冲出赛道,对参数进行优化和调整后,当ROS智能车使用第3 组数据的参数时,能够在保证操纵稳定性的前提下,以最短的时间冲过赛道终点[14]。
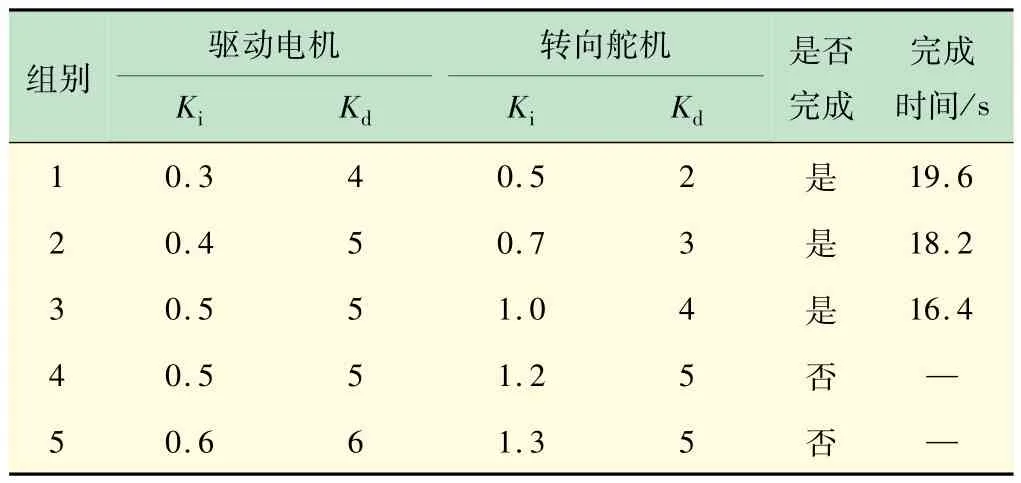
表4 ROS智能车测试数据统计表
3.2 教学效果评价
通过调查问卷的形式对学生满意度进行调查和评价,主要对课程的内容,教师授课水平,ROS 智能车操作难易程度、理论知识掌握程度等几个方面进行打分,按照分值结果计算评价指标,分为十分满意、满意、不满意[15]。对调查问卷进行回收,经过统计后的评价结果如图8 所示,可见从2017 ~2021 年,学生对课程的满意度逐年提高,不满意占比为0,对课程十分满意的学生逐步达到90%以上,取得了较好的教学效果。在课程结束后,学生能够熟练使用ROS 智能车建图、避障、通信、导航、巡线等功能,对自动控制与汽车理论知识的结合有一个较为深入的了解,为以后智能汽车相关知识的学习打下了良好的基础。
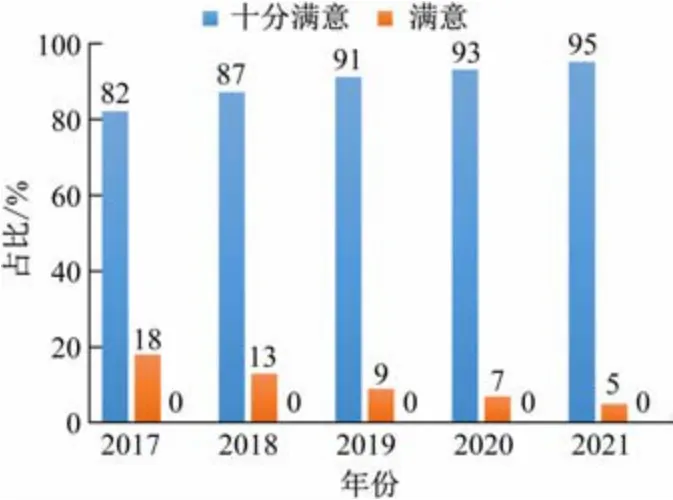
图8 学生满意度调查结果
4 结语
智能汽车是汽车产业发展的前沿和战略方向,我国亟缺该领域的相关人才,尤其是具有实践能力和创新能力的新工科人才。本文以我院智能汽车教学和课程成果为基础,设计了ROS 智能车创新性实验课,包括自动导航实验、自动巡线实验、开放自主性实验等3个实验,并依托我校首门智能汽车专业课程汽车智能化技术开展了实验教学,取得了良好的教学效果,提高了学生的实践能力和创新能力,深受学生喜爱。
