基于LPC54606 的智能小车控制系统
2023-09-13杨钊灿沈永峰陈飞洋
杨钊灿, 沈永峰, 陈飞洋
(上海电机学院机械学院,上海 201306)
0 引言
在步入21 世纪以来,人工智能得到了飞跃发展,在生活中逐渐崭露头角。控制领域的智能小车地位在人工智能应用中已经变得举足轻重[1]。路径规划是智能小车的重要研究内容。路径规划是按照某一性能指标搜索一条从起始点到目标的最优或近似最优的无碰撞路径。现阶段普遍的局部路径规划算法有人工势场法、神经网络法和遗传算法等。上述算法具有一定的局限性,搜索范围过于复杂、效率不高、易陷入局部最优解等[2]。
本文设计的智能小车路径规划使用串行PID算法和卡尔曼滤波算法,优化智能小车的行驶时间,完成路径规划任务[3]。
1 系统整体结构
主控芯片选用LPC54606 J512 BD100[4],小车硬件包刮:电源稳压、运放、摄像头、电动机驱动、远程控制、直立平衡和避障等模块。硬件电路功能有电源转换、角度控制、速度控制、数据采集、人机交互等[5]。小车系统总体框图如图1 所示。
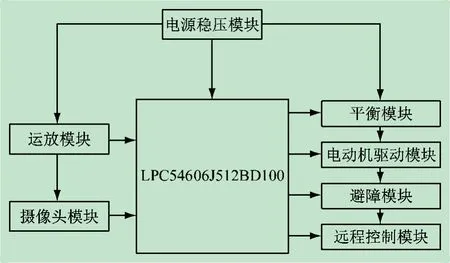
图1 智能小车系统总体框图
通过AMS1117-5 线性稳压器将外接7.8 V 电压转换为5 V电压,为运放、编码器、蜂鸣器、红外接收、蓝牙通信和超声波电路供电。通过AMS117-3 线性稳压器将5 V电压转换为3 V 电压,为陀螺仪和摄像头供电。MC34063(DC-DC 电源芯片)[6]和H 桥对电动机供电。电动机速度通过SN74LV245A进行控制。
2 硬件系统
2.1 LPC54606J512BD100 单片机最小系统
智能小车的控制核心是单片机系统,主要控制各模块工作。考虑到需要采集较多数据,完成不同场景中的任务,选用LPC54606J512BD 100 芯片[7]。
LPC54606J512BD100 MCU 系列集成了高能效的220 MHz Arm® Cortex® -M4 内核与多种高速连接选项、先进的定时以及模拟功能[8]。DSP 功能使LPC546xx MCU器件可支持数据密集型应用的复杂算法。该系列配有高达512 KB 的闪存以及外部存储器接口,能弹性适应需求变化。闪存选项可灵活支持内、外部大型存储器配置。借助LPC 54000 系列的内置兼容性,能提供一个无缝移动路径来提高处理性能,还能灵活增加其他先进外设。
选用LPC54606J512BD100 芯片的单片机电路,降低了硬件故障风险,提高运行效率,并在主控板设计对应的排针电路[9]。分板设计的优点是便于更好地提升硬件维修速度。单片机核心板和主板对应的排针原理如图2、3 所示。
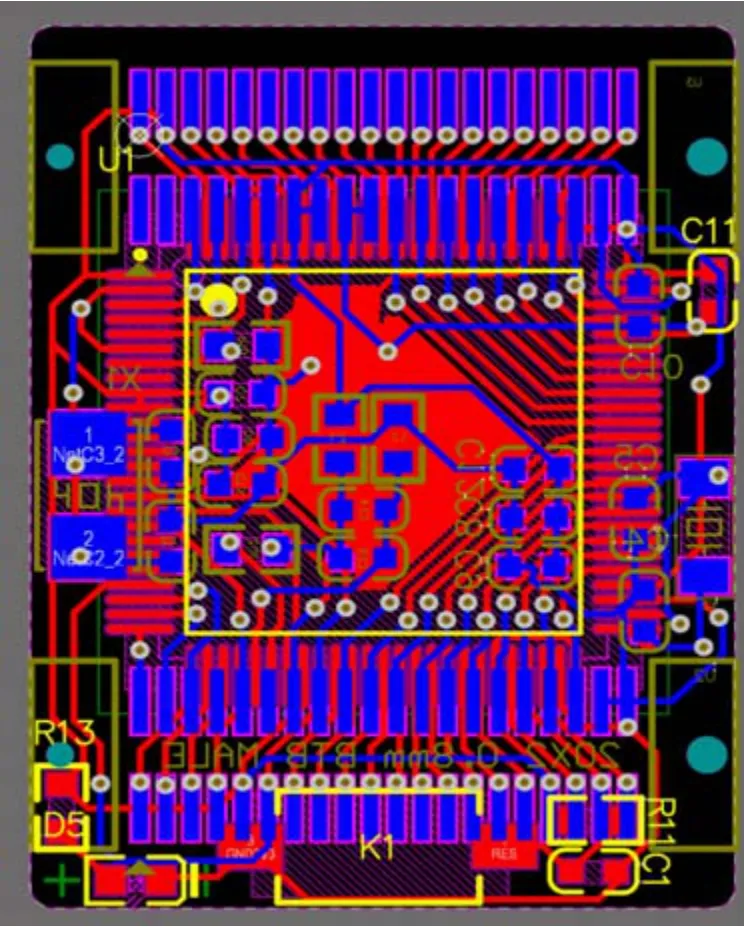
图2 单片机核心板
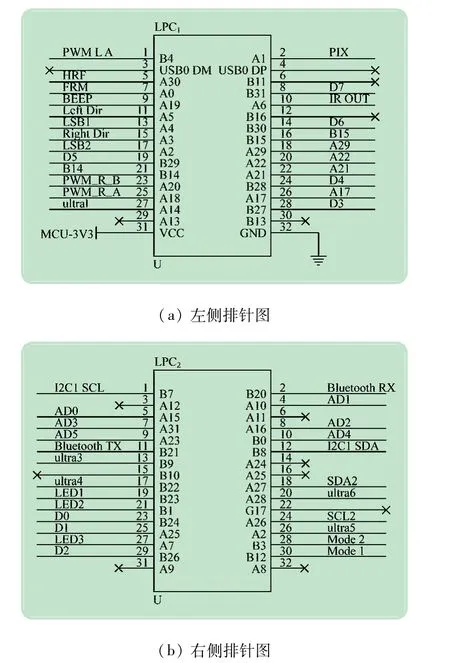
图3 核心板在主板上的排针原理图
2.2 电源稳压
各传感器供电要求较高,需供给不同的电压,在智能小车运行过程中,路径规划需要充足的电压,所以采用7.2 V镍镉充电电池[10]。
在智能小车硬件系统中,各模块需要进行稳压模块转换电压。AMS 117-5.0 线性稳压电路[11]将7.2 V电压稳压到5 V,为运放、蓝牙通信、红外接收、编码器、蜂鸣器和超声波等模块供电。由于陀螺仪、摄像头和单片机核心板等所需电压较低[12],选用AMS 117-3.0 线性稳压电路进行供电。AM S117-5.0 线性稳压电路和AMS117-3.0 线性稳压电路原理如图4、5所示。

图5 AMS117-3.0电路
2.3 运放模块
考虑到电磁线接收的数据的比较繁杂,控制系统需要稳定的电磁数据,选用NE5532 运放电路进行电磁数据的采集和滤波[13]。由于路径规划和直立状态需要稳定电磁数据,选用3 路NE5532 运放进行电磁数据的采集。运放模块部分电路原理如图6 所示。
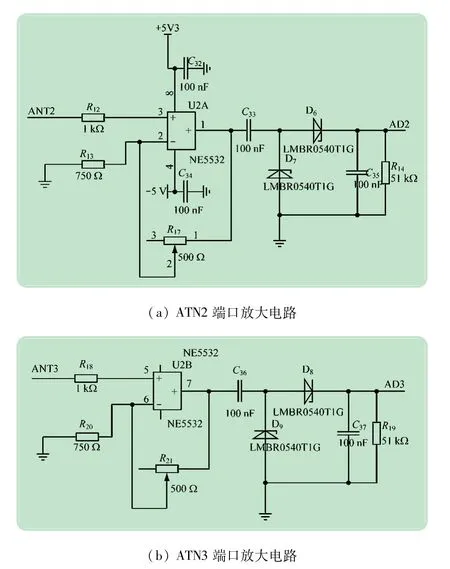
图6 NE5532运放电路
2.4 摄像头模块和陀螺仪
智能小车的普遍姿态是直立状态[14],特殊姿态是3 轮状态。在遇到姿态转换标志时,经摄像头的检测和陀螺仪的控制,小车由直立状态转变为3 轮着地状态。为方便不同类型摄像头的搭配,使用20 pin和18 pin摄像头底座。摄像头选用MT9V034。陀螺仪是直立功能的核心硬件,为节约主板空间,陀螺仪使用外接,在主板预留相应的排针。摄像头和陀螺仪电路原理如图7、8 所示。
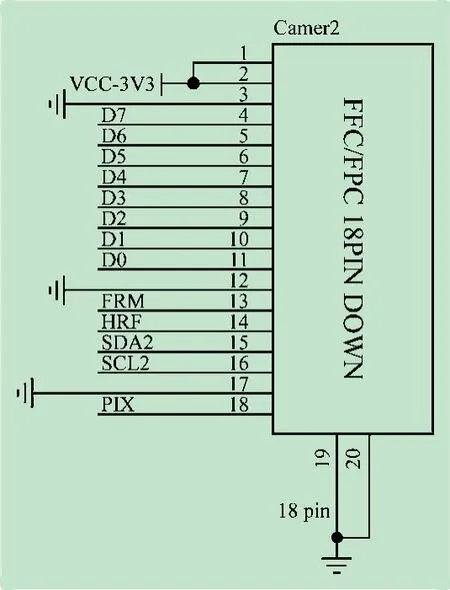
图7 摄像头电路
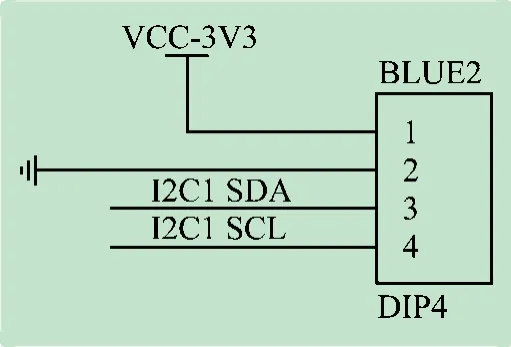
图8 陀螺仪电路
2.5 超声波避障
考虑到避障、节约主板空间、电路集成等要求,超声波使用外接。为提高避障的成功率,使用3 组超声波障碍物识别。超声波位置在智能小车地前端,这样有利智能小车对障碍物的检测,并对直立起到辅助作用。超声波原理[13]如图9 所示。
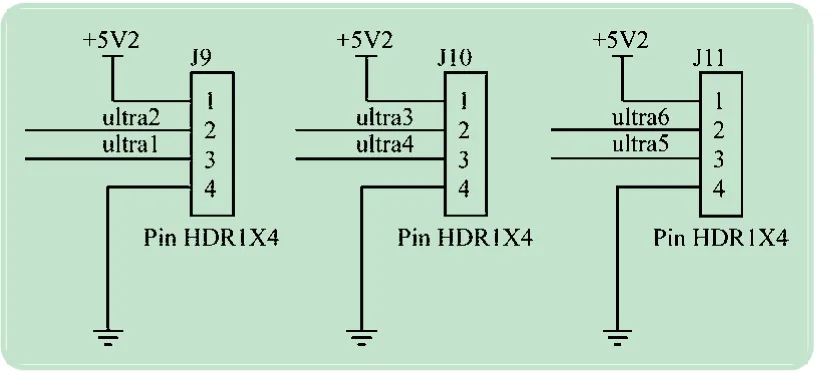
图9 超声波电路
2.6 远程控制模块
在智能小车设计中,需进行无线传输和远程操控,选用红外接收模块、蓝牙模块以及OLED 显示模块[15]。OLED模块极大地提高了调车效率,可以显示电磁数据、小车实时速度、遥控状态。红外接收和蓝牙模块有利于人机交互,并能进行手动控制。红外接收模块PCB原理如图10 所示。
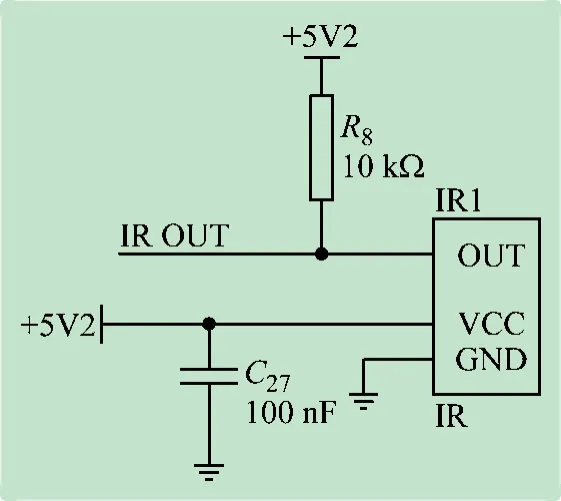
图10 红外接收电路
2.7 电动机驱动
为提供电动机足够的电压,选用MC34063(DCDC电源芯片)电路进行电源升压。为更好地对电动机速度和H桥相关信号进行控制,使用SN74LV245A逻辑芯片电路[16]。部分原理如图11 所示。
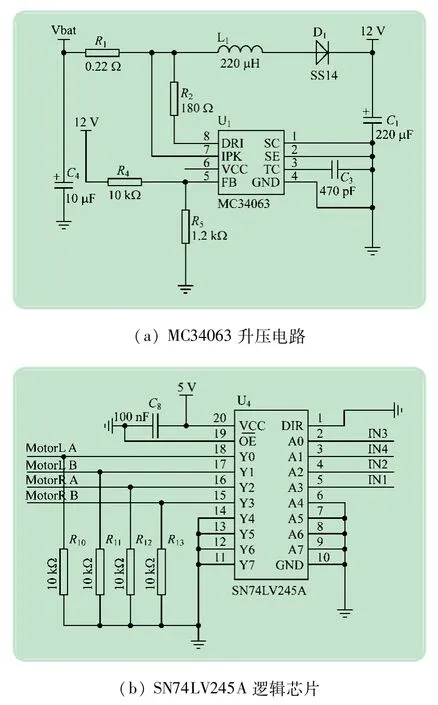
图11 MC34063和SN74LV245A电路功能
3 软件设计
主控芯片选用LPC54606J512 BD100,使用Keil uVision5 编译软件,用C语言进行程序编写,程序主要具备直立、自主寻迹、避障和姿态转换等功能。
3.1 主程序设计
主程序设置的变量。起跑停车、直立相关、环岛相关和摄像头等变量。主程序包含对陀螺仪、I2C 端口、OLED显示、PWM控制、计数器、电磁采集、超声波、摄像头、串口的初始化。主程序调用有图像处理、姿态转换、停车标志位判定和OLED显示等。
3.2 直立程序
智能小车最基本的行驶状态是直立状态。小车主要在直立状态中完成相应的路径规划任务。直立程序使用PID算法和卡尔曼滤波算法。经过串行PID算法处理电磁线的数据,计算直立所需转矩。
直立程序处理过程。对电动机、角度环、角速度环、转向环进行浮点数据组定义,通过位置式PID控制算法对小车进行直立控制。PID直立控制算法程序如图12 所示。
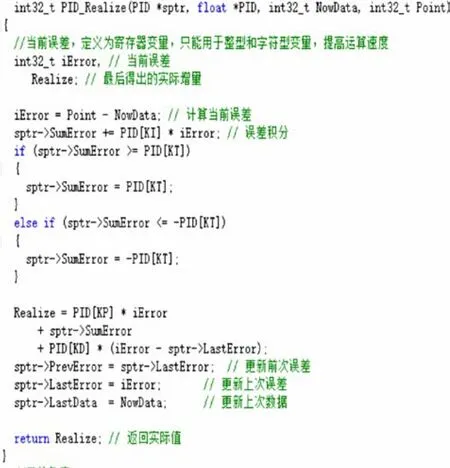
图12 PID直立控制算法
3.3 避障处理
避障处理是智能小车的功能之一。超声波传感器在规定时间收、发超声波。通过采集的数据,测算障碍物的距离与陀螺仪配合进行避障。
避障程序的处理过程。每10 ms 收发超声波,根据距离公式得到障碍物与小车的距离;在距离障碍物80 cm处,小车向右旋转90°,行驶80 cm,然后向左旋转90°,再次行驶80 cm,最后向左旋转90°,行驶80 cm返回赛道。部分路障处理程序如图13 所示。
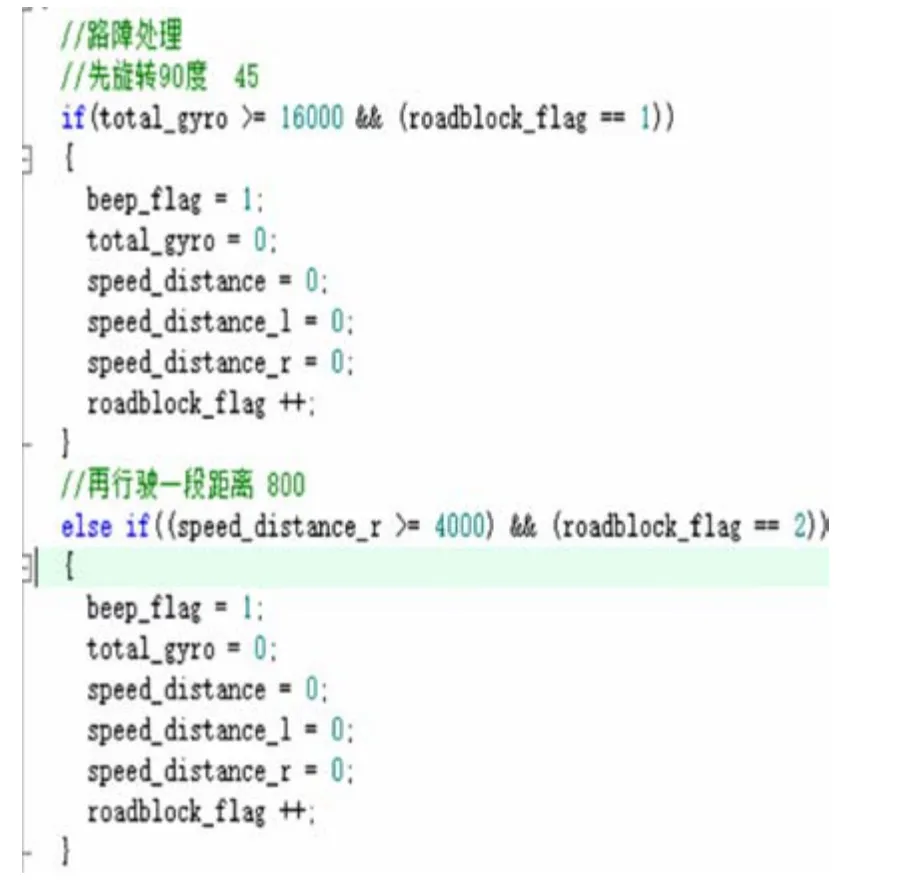
图13 部分避障处理程序
3.4 电磁数据处理
电磁数据处理对智能小车的路径规划显得十分重要。程序主要使用卡尔曼滤波算法,通过5 个工字电感对相应的电磁数据进行采集,经滤波处理得到稳定的正弦波,程序对波形数据进行处理。每路电感电磁数据处理程序所使用的部分算法如图14 所示。
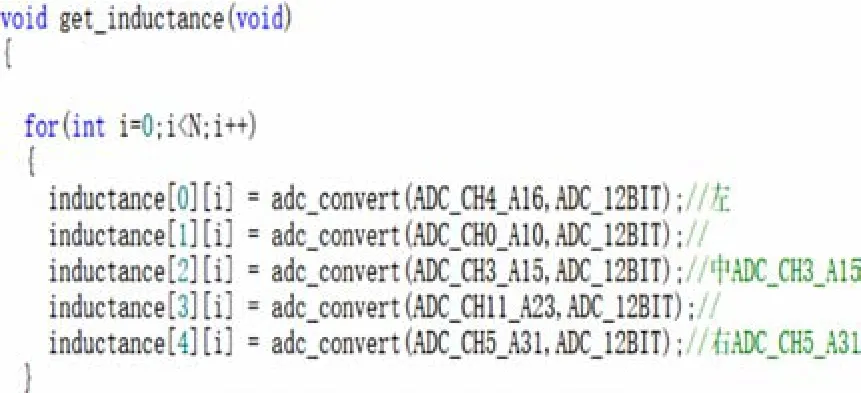
图14 电磁处理程序
3.5 姿态转换
从直立到3 轮状态的转换是智能小车的功能之一。通过摄像头识别对应的黑白车道线,经陀螺仪进行转矩调整,使智能小车从直立状态转换为3 轮状态,完成断路路况下的姿态转换。
摄像头程序中一维数组的值是二维数组的累加,通过处理得到的图像值,触发姿态转换的标志位,完成姿态转换,部分程序如图15 所示。
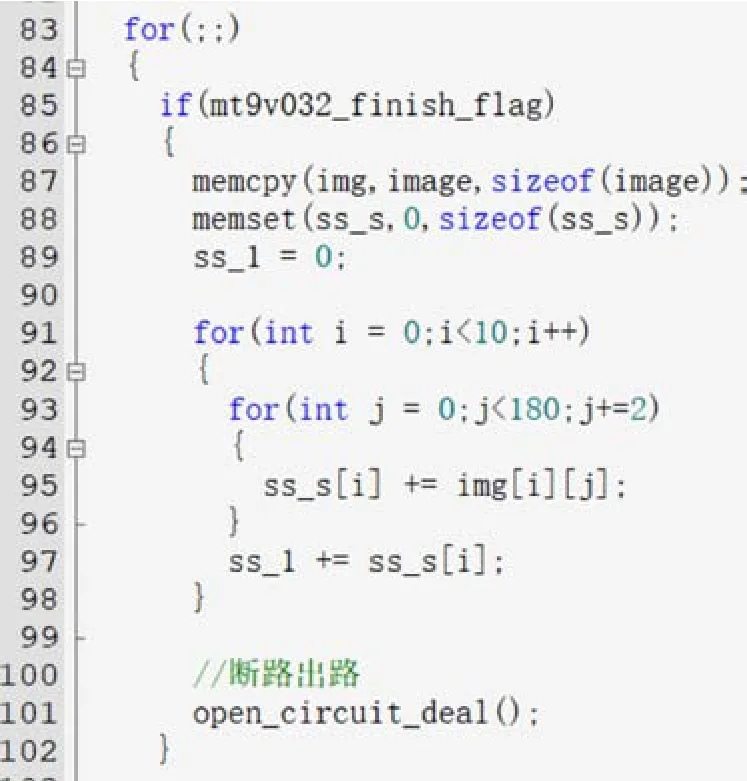
图15 摄像头识别姿态转换标志程序
3.6 环岛处理
环岛是道路的元素之一,环岛处理有利小车智能化运行。通过电感对环岛电磁线的数据采集,判别环岛元素,触发环岛处理的标志位完成环岛元素的处理。
在直立状态中遇到环岛的情况,程序处理过程是:当电磁支架最左边电感和最右边电感之和的值大于2.5 mH,中间电感值大于0.8 mH时,智能小车进入环岛;当磁支架最左边电感和最右边电感之和的值小于1 mH时,智能小车离开环岛。直立状态下的环岛处理程序如图16 所示。
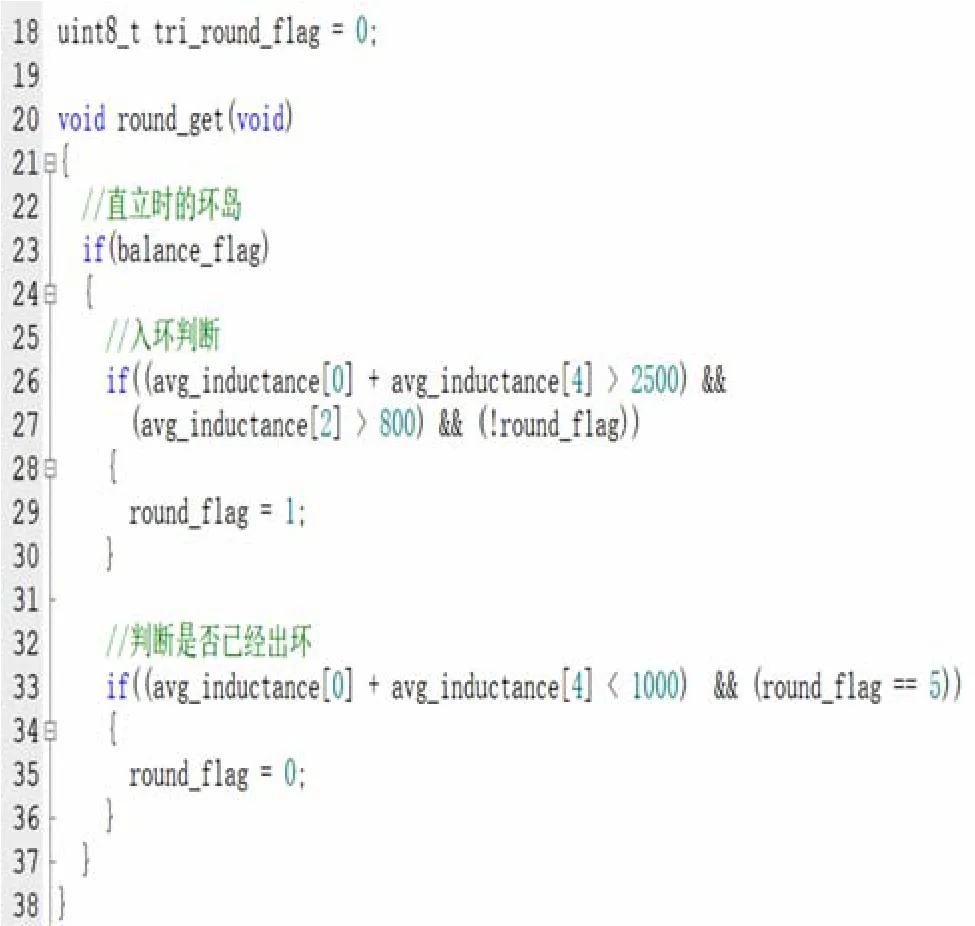
图16 直立状态中环岛处理
3.7 速度处理
面对复杂环境下的路径规划,速度处理的程序显得尤为重要。为高效处理速度,使用PID 算法进行控制,加入串行PID,更好地完成相应的任务。速度处理程序分为直立状态程序和3 轮状态程序,直立状态的速度程序如图17 所示。
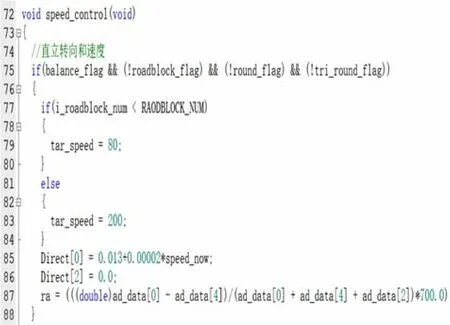
图17 直立状态中速度处理
4 实验结果验证
实验设置如下任务:超声波避障、姿态转换和环岛处理。在室内进行赛道搭建,进行室外场景的模拟。小车打开电源开关之后,通过PID 算法配合陀螺仪执行直立任务,根据电磁数据的采集进行相应的路径规划。碰到路障,经过超声波采集障碍物信息,触发避障程序,进行避障,并重回赛道。经过速度程序处理,在短时间内到达环岛,通过电磁数据的变化,识别环岛元素,配合蜂鸣器完成环岛路况的处理。通过摄像头识别姿态转换车道线,完成从直立向3 轮状态的转变。主板PCB如图18 所示。部分实验场景如图19 所示。
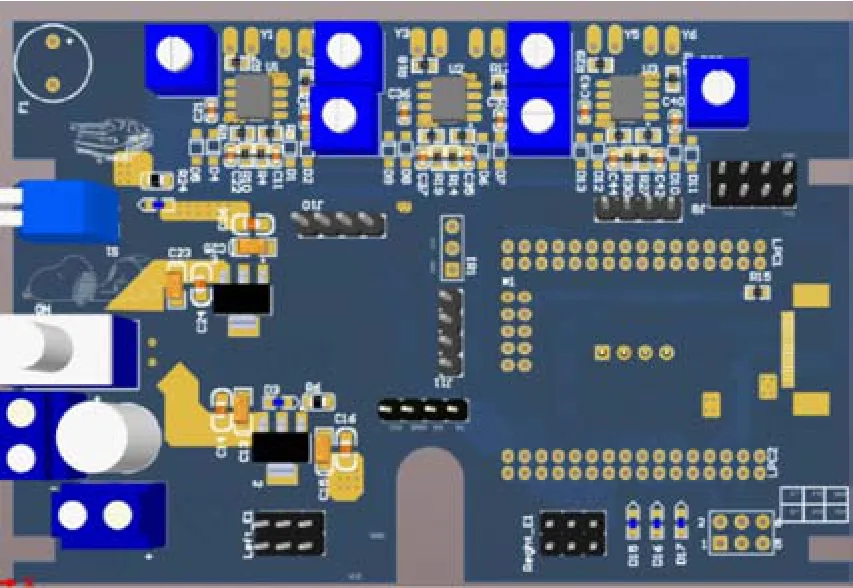
图18 主板PCB图

图19 弯道场景
5 结语
本文基于LPC54606 设计了一款直立行驶的智能小车,使用超声波进行障碍物探索,使小车在距障碍物30 cm距离外进行避障操作。陀螺仪和摄像头结合实行姿态转换任务,摄像头进行车道线识别,当检测到黑白车道线后,陀螺仪进行姿态转换。通过电磁采集模块和编码器模块进行路径规划相应的控制,构成闭环系统,提高系统的稳定性、准确性和快速性。
