基于FPGA的导航雷达MTD算法设计与实现
2023-09-13付昊
付 昊
(海装上海局驻上海地区第七军事代表室,上海 201300)
0 引 言
船用导航雷达的探测对象通常是海面或低空中的运动物体,如舰船、小艇、无人机等,这些目标的回波往往与海浪、云雨、地物等形成的杂波或干扰背景叠加在一起,而且目标回波强度一般低于干扰杂波强度,影响对目标的检测和跟踪。
根据多普勒效应,相对本船具有径向运动速度的目标回波频率会发生多普勒频移,且与径向运动速度的大小成正比。由于速度不同,运动目标回波和干扰杂波可以在多普勒维度进行区分。基于此,相参雷达从干扰杂波背景中提取出运动目标的回波信号,如动目标显示(Moving Target Indication,MTI)雷达。MTI雷达使用动目标滤波器,滤除各种干扰杂波而保留运动目标回波信号,可以大大改善雷达杂波抑制能力和抗干扰性能,提升雷达在强杂波等复杂场景中检测目标的能力。如果再利用与运动目标回波信号脉冲串匹配滤波理论和恒虚警率处理技术,则不仅可以抑制杂波,还能通过相参积累提高目标回波信噪比,即雷达动目标检测(Moving Target Detection,MTD)[1]。
为了提高导航雷达识别复杂背景下动目标的能力,本文提出采用Xilinx K7 FPGA设计并实现MTD处理算法,并开展无人机探测试验验证。
1 基于FPGA的MTD 算法设计与实现
1.1 硬件平台
Kintex-7是Xilinx公司一款基于28 nm技术的新型FPGA,性价比和功耗均优于Virtex-6系列,其资源如图1所示,可以看出该款FPGA具有丰富的逻辑资源、信号处理DSP以及高速通信接口GTX、PCIE等,满足MTD高带宽、实时性的要求[2]。从性能、功耗和成本方面综合考虑,选择该款产品实现雷达MTD算法。
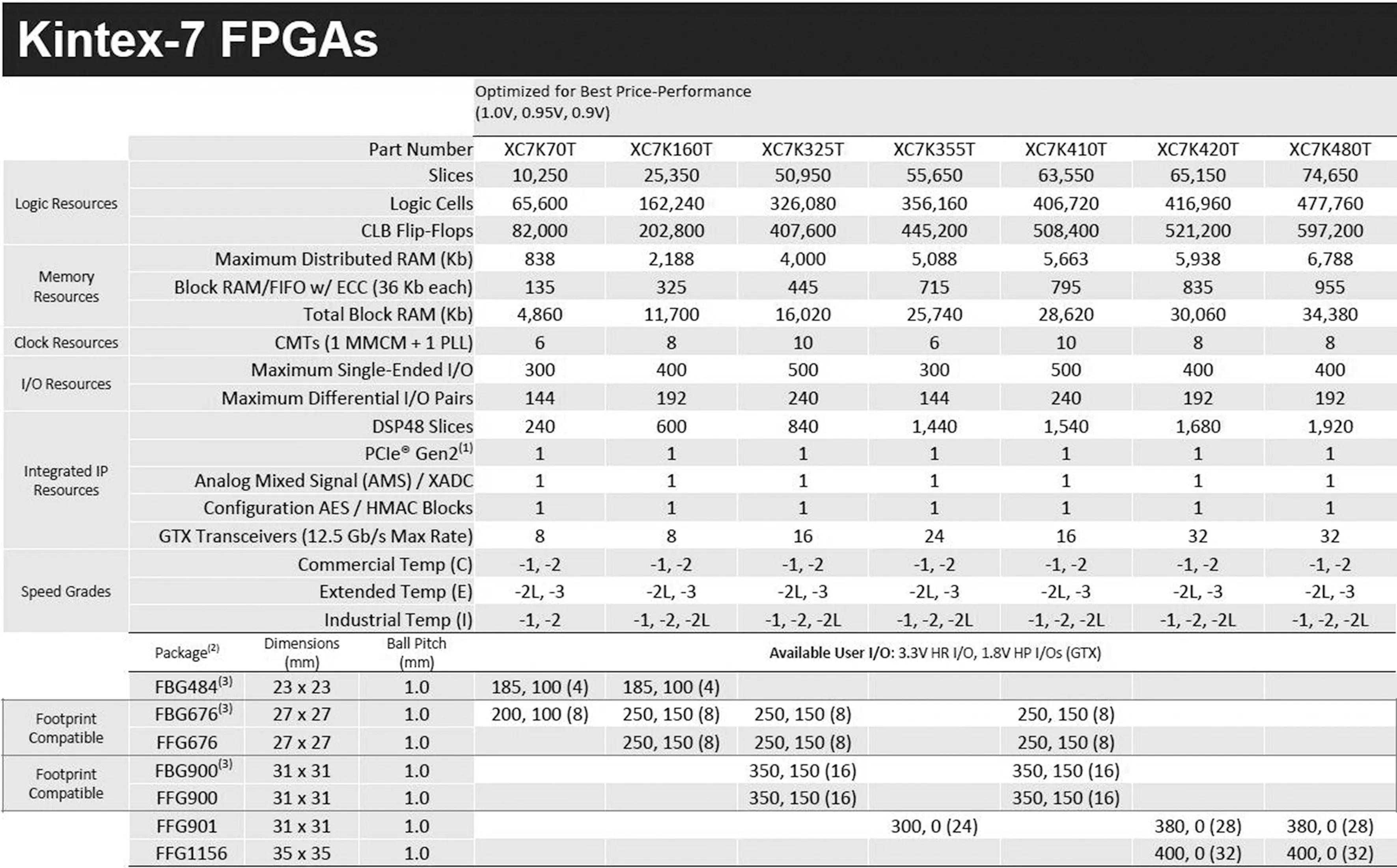
图1 Kintex-7系列FPGA详细资源
1.2 MTD算法设计
基于多普勒雷达实现MTD算法流程如图2所示。

图2 MTD算法流程
雷达回波数据通过ADC采样、数字下变频、脉冲压缩、数据缓存、MTD数据处理等过程完成整个动目标的检测过程,整个数据开发基于Xilinx K7 FPGA数据处理平台。
(1)ADC采样
雷达变频组件接收通道输出100 MHz中频信号,信号带宽为20 MHz,AD采样时钟为80 MHz,ADC芯片负责将中频模拟信号转化为数字信号。
(2)数字下变频
本雷达采用数字下变频方式对中频信号进行采样滤波,其信号处理流程如图3所示。

图3 数字下变频
数控振荡器(NCO)生成相位相差90°的数字本振信号供两路混频器使用。ADC采样输出的中频数字信号经混频后通过FIR低通滤波器,滤出所需的零频基带信号。FIR低通滤波器的选用与有效信号带宽及采样率的比值相关。由于本设计采用多脉冲拼接处理,除简单脉冲外,还涉及两类信号带宽,因此须设计两类FIR低通滤波器,其滤波器频率响应如图4、图5所示。
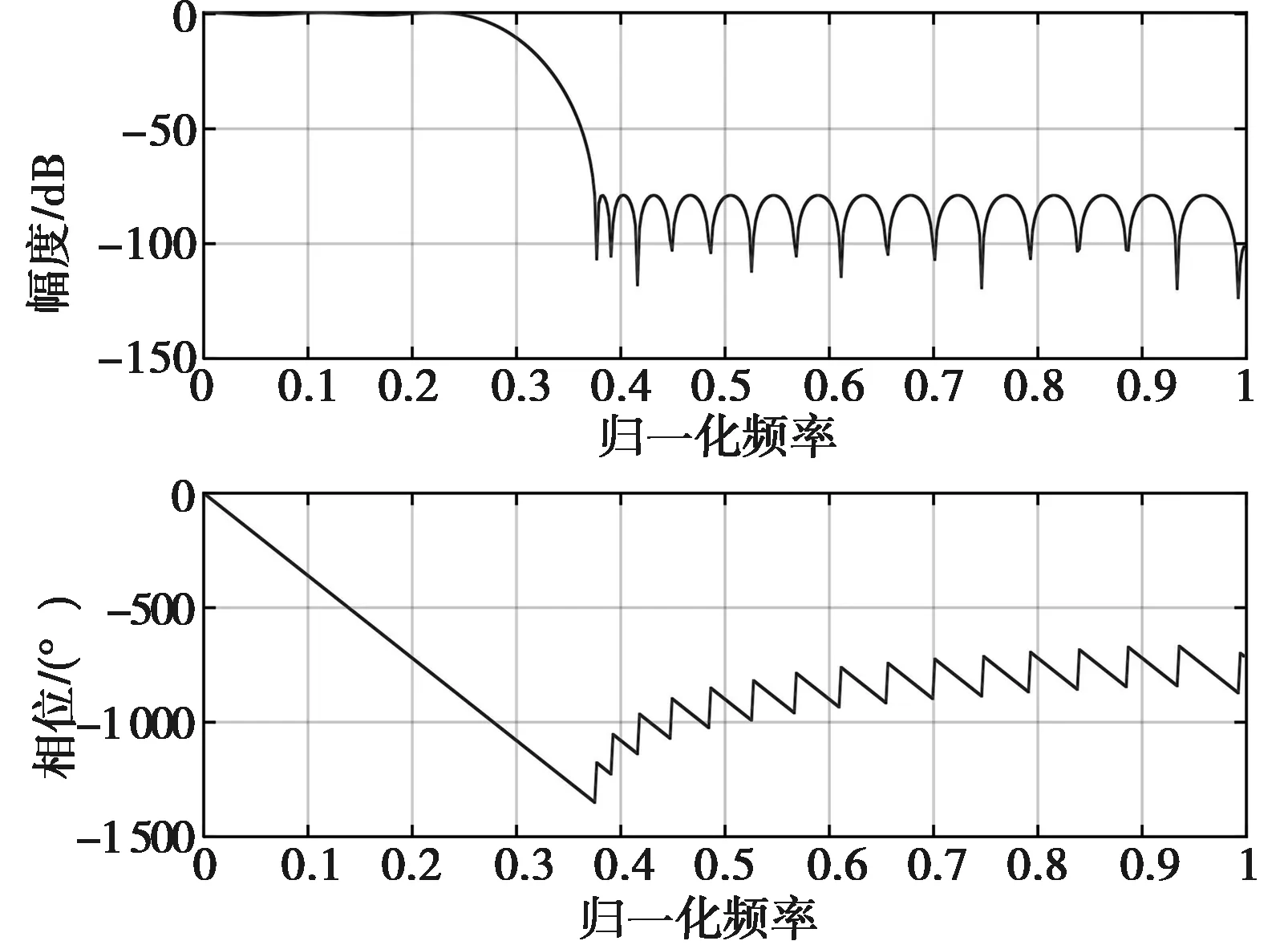
图4 FIR滤波器1频率响应

图5 FIR滤波器2频率响应
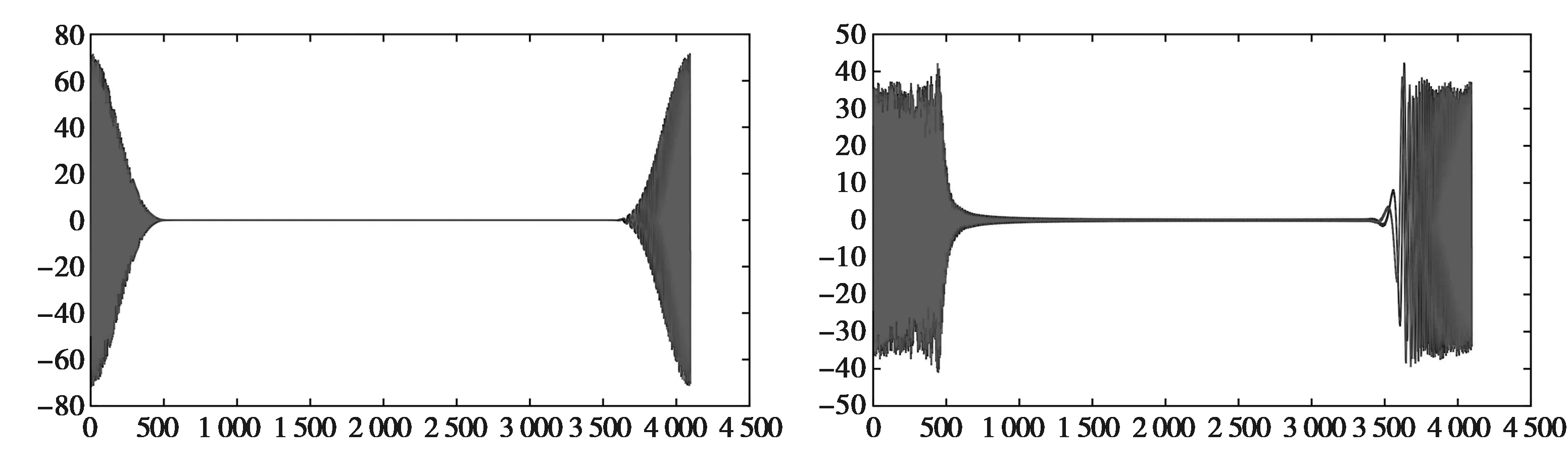
AD采样及数字下变频时域、频域信号分别如图6、图7所示。

(a) 时域信号
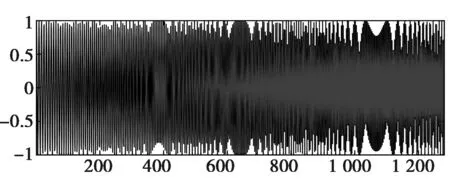
(a) 时域信号
(3)脉冲压缩
在回波进行脉冲压缩匹配滤波之前,FPGA先缓存各波形的匹配系数。在脉冲压缩时,根据设计时序波形组合选择各自的匹配系数进行匹配滤波,如图8所示。

图8 脉冲压缩流程
脉冲压缩信号处理流程各阶段信号波形如图9所示。
(a) 匹配系数 (b) 回波时频转换(FFT)
(4)数据缓存
由于脉冲压缩输出的结果数据量大(32位I路和Q路),故采用DDR3进行数据缓存,流程如图10所示。

图10 MTD数据缓存流程
数据缓存数据处理过程主要利用FPGA的DDR3MIG、BRAM等IP核设计开发。
(5)MTD数据处理
MTD数据处理主要包括DDR3数据搬移、数据加窗、FFT过程、多普勒通道识别等过程,其具体处理流程如图11所示。
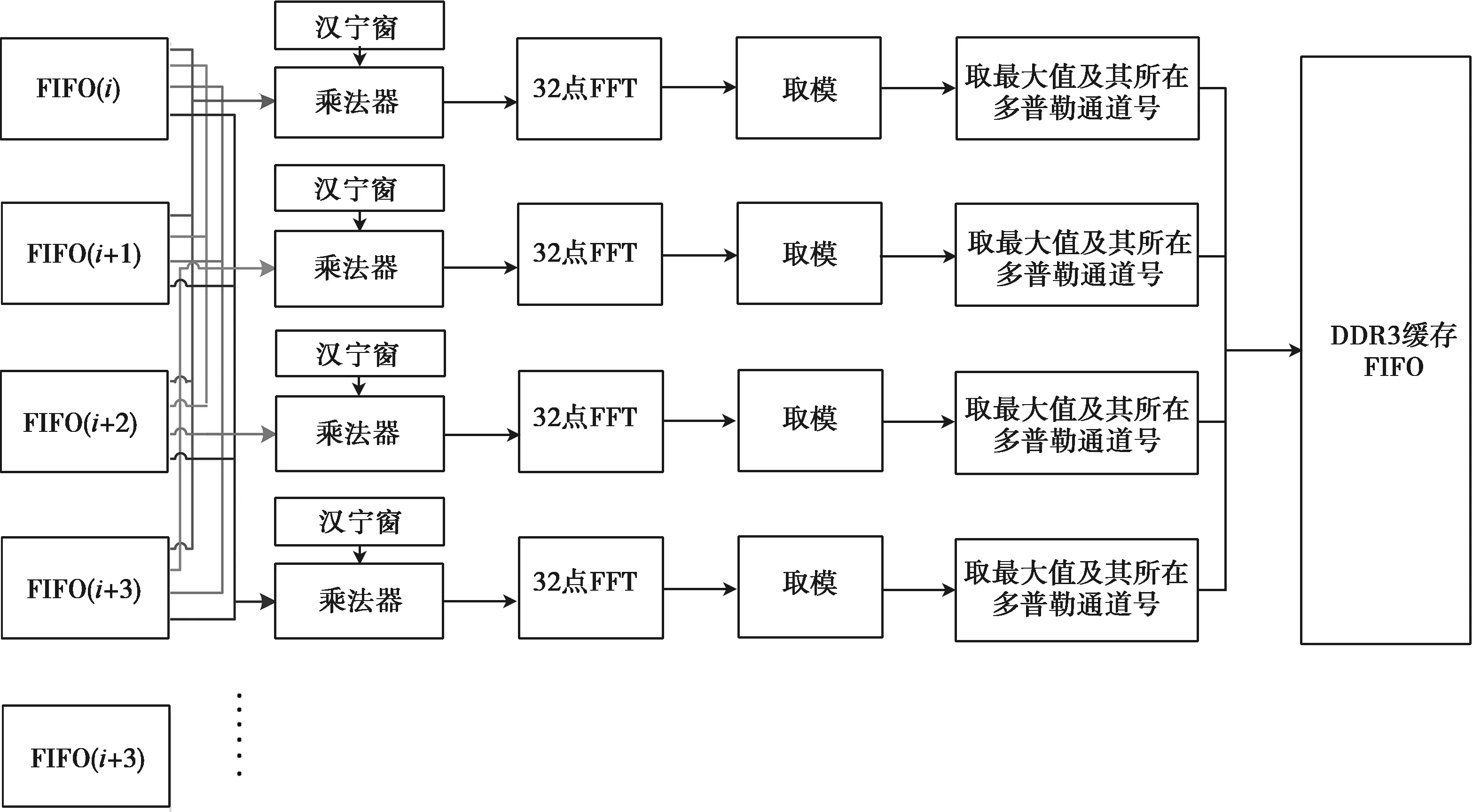
图11 MTD数据流程图
MTD数据处理过程主要利用FPGA的DDR3 MIG、BRAM、FIFO、XFFT、Multiplier、Coridic等IP核设计开发。
1.3 MTD算法实现
基于脉冲压缩导航雷达的“无人机警戒”雷达,通过Xilinx K7 FPGA实现了MTD。图12给出了在试验过程中无人机处于悬停、逼近、远离状态时雷达数据MTD处理的结果,通过多普勒通道号可以直观展示动目标的实时状态,有助于提高复杂背景下动目标的识别能力。
(a)无人机静止
2 结束语
本文在分析导航雷达利用多普勒效应进行MTI原理的基础上,采用Xilinx K7 FPGA平台实现MTD处理,并开展无人机探测试验,试验结果表明:基于FPGA的导航雷达MTD算法满足无人机探测要求,能够有效提高复杂背景下动目标的识别能力。
