舰载雷达仿真试验用态势与环境建模实施方法
2023-09-13吴竞超王玲玲
吴竞超,王玲玲,袁 越
(中国船舶集团有限公司第八研究院,南京 211153)
0 引 言
在信息化作战过程中,雷达系统一般都是在复杂的电磁干扰环境下完成各种作战任务[1]。海上电子干扰环境、新型目标特性的日趋复杂,以及海上多重多变的自然电磁环境对舰载雷达探测性能的影响,都对舰载雷达设计研制提出了更高的要求。现代仿真技术提出用仿真方法确定实际系统的模型[2],如何构建更为客观高效的舰载雷达探测的态势环境仿真模型成为领域内技术研究热点。
舰载雷达态势环境建模是构建舰载雷达数字仿真试验平台的重要组成和实现舰载雷达数字仿真试验的必备条件。针对舰载雷达仿真设计和研制对探测态势环境仿真模型的能力需求,本文提出一种舰载雷达态势环境仿真模型设计方法,可支撑舰载雷达技术性能、战术功能和使用性能设计及研制优化。
1 仿真模型系统原理架构
舰载雷达态势环境仿真模型系统是目标态势和电磁环境(含人为电子干扰环境和自然电子干扰环境)等态势环境的系统仿真建模,通过对雷达系统仿真设计和所需态势环境模型功能系统的抽象化数字描述,并转换为能在计算机上运行的等价系统模型及数据,实现对舰载雷达态势环境的系统仿真。
舰载雷达态势环境仿真模型系统功能架构如图1所示,主要包括系统应用层、功能层、性能层及业务工具层、数据支撑层等,其中应用层用于支撑雷达仿真系统模型的试验、验证与评估、优化。
图1 舰载雷达态势环境仿真模型系统体系原理架构
系统可以采用态势环境实时仿真数据、加载态势环境仿真数据库数据和实装实际试验采集的态势环境数据,按舰载雷达系统仿真模型试验验证的仿真环境布站要求,通过时空统一接口协议,构建和生成所需的空中目标、海面目标(含低空小目标)、岸基目标和人为有源/无源干扰环境、自然电磁环境等舰载雷达态势环境主要性能模型,并以此形成集目标、人为干扰、自然电磁环境等为一体的态势环境,经多维综合,实现舰载雷达系统仿真模型试验验证所需的舰载雷达态势环境仿真系统模型。
为确保可以客观地支撑舰载雷达系统仿真模型的试验验证,根据系统需仿真试验验证的有源/无源干扰样式和等级,以及海上自然电磁环境等级(如不同海域、海况、风速、地物背景等),开展舰载雷达态势环境仿真模型态势评估,以针对性地满足仿真模型对不同态势环境下的试验验证需求。
2 仿真系统模型及其功能
舰载雷达态势环境仿真用模型组成和功能如图2所示,包括:
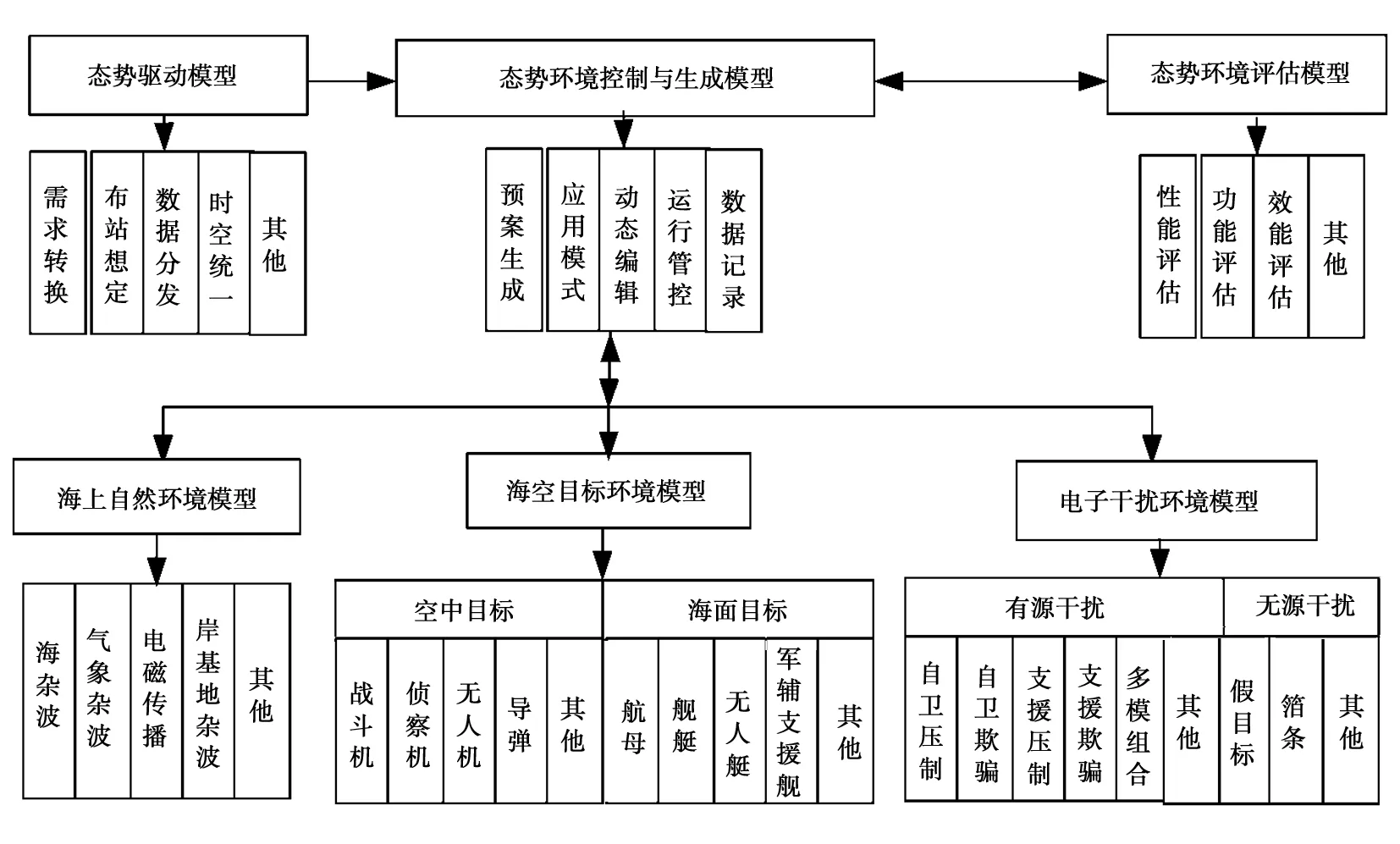
图2 舰载雷达态势环境仿真模型典型组成图
(1)自然电磁环境模型。包括对海杂波、气象、电磁传播等环境的仿真实现能力;
(2)目标模型。包括对空中、低空/超低空、海面等雷达主动探测目标和目标平台雷达辐射源信号等雷达被动探测目标的仿真实现能力;
(3)电子干扰模型。包括对自卫式压制和欺骗干扰、支援式压制和欺骗干扰、多模组合干扰等人为有源干扰,以及假目标干扰、箔条干扰等人为无源干扰的仿真实现能力;
(4)态势环境驱动模型。包括对面向雷达的需求转换、雷达作战环境、目标战术分布、综合数据生成,及其与统一态势坐标转化等有关的仿真实现能力;
(5)态势环境控制与生成模型。包括对态势环境预案生成及其环境模型、目标模型、态势驱动模型的模式、方式等的编辑、处理、记录和运行管理等控制的仿真实现能力;
(6)态势环境评估模型。包括对态势环境与实际应用需求的符合性评估、态势环境性能评估、功能评估以及使用效能评估等的仿真实现能力。
3 基本设计方法
3.1 基本要求
(1)需求分析与态势想定
需求分析与态势想定是舰载雷达态势环境仿真模型构架的重要前提和基础,针对舰载雷达系统仿真模型的体制、功能和技术参数,确立态势环境仿真模型的目标与要求;重点分析仿真建模对象的构成、边界和环境,形成建模的前提约束和假设条件;明确建模的层次、粒态势环境仿真参数的精度和使用范围,形成态势环境建模仿真条件和可接受准则。
(2)建模设计
舰载雷达态势环境仿真建模是实现态势环境及其各模块仿真的关键。仿真建模软件应符合软件工程化要求,应能有效反映多需功能的特性和规律,满足所需各类态势仿真、评估等的可信度和精度,并具有模型校验、验证和确认的接口等。模型数据应满足精度要求,且完备、准确,模型数据分类、数据内容描述和数据元单位符号、数据类型、长度、取值范围、标示符等应规范。
3.2 基本流程
舰载雷达态势环境仿真建模基本流程如图3所示。由态势驱动模型基于需求生成所需的态势环境类别及其各种态势与环境的布站模式,由态势环境控制与生成模型建立态势环境动态生成预案;根据态势环境动态生成预案,调用和对自然电磁环境、目标环境、干扰环境的工作模式配置和参数设置;经时空统一后,进行自然电磁环境、目标环境、干扰环境等模型工作模式与参数的相互关联和综合,形成综合态势环境;再由态势环境驱动模型根据舰载雷达系统仿真模型试验,对各种目标、干扰等的实时位置机动、工作模式和工作参数变化等要求,进行综合态势的实时更新,更新后的综合环境态势须进行针对态势环境与要求的功能、性能和应用效能等仿真结果及其置信度评估,当评估结果不满足使用要求时,应调整原动态仿真预案,并以此重新建立所需的舰载雷达态势环境。

图3 舰载雷达态势环境仿真建模基本流程图
4 典型舰载雷达态势环境仿真
针对舰载雷达不同性能仿真试验对不同态势环境的需求,应按需配置相应的目标态势、人为干扰环境和自然电磁环境等模型。例如开展雷达对空探测精度试验(含对空精度标校试验)时,典型目标态势须分别配置2个空中目标(1大、1小)和2个低空目标(1个低小慢、1个低小快),以满足舰载雷达对不同空中典型目标的探测精度仿真要求,或对海分别配置作接近和远离(含距离、方位)机动的大、中、小各2个海面目标。当开展舰载雷达抗复杂有源/无源干扰性能试验时,应按需配置目标态势、干扰环境和自然电磁环境等可等效实际使用的态势与环境仿真模型,并分别经态势环境驱动模型、态势环境控制与生成模型形成各类仿真试验所需的仿真态势环境,由态势环境评估模型评估所构建的仿真态势环境与仿真试验所需的态势环境的一致性。
根据上述建模实施要求,针对舰载三坐标雷达仿真基本模型,开展对空动态误差精度(标校)试验用态势环境的基本建模和应用,按需分别配置一级海况下的目标仿真基本模型和目标态势特性,如表1所示。

表1 试验用目标模型及目标态势特性配置表
软件环境的配置操作系统为Microsoft Windows,编程环境为Microsoft Visual、Matlab。态势环境、目标环境、目标机动和干扰设置界面分别如图4~7所示。

图4 态势环境设置界面

图5 目标部署设置
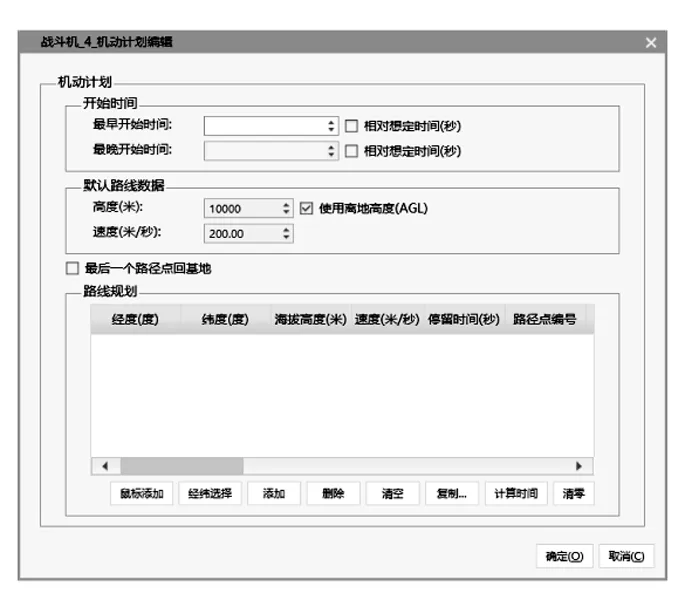
图6 目标机动设置

图7 干扰设置界面
根据舰载雷达仿真参数及其模型试验需求,由态势环境驱动模型形成实时更新的连续试验态势环境参数,评估仿真结果及其置信度,结果表明:模拟的目标运动范围大于被试雷达仿真模型对不同目标的最大作用距离的20%;空中目标运动高度5档可调;低空目标运动高度3档可调;目标距离位置、角度位置、速度精度均优于被试雷达仿真模型最小可检测单元的1/3。在对导弹等目标机动速度仿真中模拟了1~6 Ma等多种速度,可支撑舰载雷达实装试验中难以实装配置形成的超高声速目标态势。仿真实现的态势环境参数满足试验需求。
5 结束语
针对舰载雷达仿真设计和研制对探测态势环境仿真模型的能力需求及仿真模型技术发展趋势,本文提出了一种舰载雷达态势环境仿真模型设计方法。通过分析仿真模型的体系架构、模型要求和态势环境仿真生成方法等,探讨了舰载雷达态势环境仿真模型与被试雷达数字仿真模型解耦、模型与参数解耦的可行性。按照本文方法设计的仿真系统能够实现各种极限探测态势条件下的技术性能、战术功能和使用效能等试验与参数测试,以及检验结果评估等功能,可支撑舰载雷达技术性能、战术功能和使用性能设计及研制优化,为舰载雷达态势环境建模实施方法提供技术参考。
