用于水下结构监测的巡检机器人系统
2023-09-08叶林杰吴迪高谢纯辉
叶林杰,吴迪高,谢纯辉
(浙江交工新材料有限公司,浙江 杭州 310000)
1 引言
水下环境一直是人类各种活动的挑战。水下设施包括大坝、输水管道、码头、海上石油平台等,主要是混凝土结构或钢结构,水下环境的腐蚀加速了这些设施的老化过程。水下设施的检查和维护是有较大困难的,因此可采用机器人系统,配备一套传感器和监测设备进行不同水下结构和设备的检查。
2 水下导航系统概述
探索未知空间可以使用同步定位测绘(SLAM)技术。在三维同步定位测绘技术中,最常见的传感器是RGB-D 摄像头、激光扫描仪或视觉摄像头。它们可以产生深度图像(彩色或黑白)、点云或平面图像。目前主要有两种算法方法来计算上述传感器的数据。
第一种方法是基于迭代最近点(ICP)算法。该算法用于匹配曲面:
其中,Sref是参考曲面,是一个点云,是旋转平移。
ICP 算法从q0开始,根据式(1)进行最小化迭代。根据前一步的qk计算Sref上的点投影,并计算下一步的qk+1。对于每一步k,算法为式(2):
该算法可以在没有初始值qk而只有初始旋转平移值的情况下运行,如初始值可以是里程计或惯性测量单元(IMU)传感器确定的设备速度。
第二种方法是基于特征提取。首先提取输入数据集的特征,与之前测量的特征值匹配,通过评估这些特征点位置的空间特征,可以得到两坐标系之间的对应关系。基于这些对应关系,可以进行图像信息的变换。
还有一种基于有限惯性信息的水下自主航行器(auv)多波束声纳测量的同步定位测绘技术。利用图片同步定位测绘技术来确定机器人位置。该方案的算法为从声纳数据中提取特征创建描述符号,然后将其与以前的状态特征进行比较。其中一个假设是,只使用自然地标,并只提取易于识别的特征。这种方法的处理结果很好,尤其是在处理循环闭环事件时。
Silveira 等人提出了另一个导航概念,采用一个基于生物学原理的模块化系统,名为海豚同步定位测绘技术。它融合了视觉摄像机、声纳、IMU 传感器和多普勒测速声呐(DVL)等多种传感器。该方案将平面同步定位测绘神经网络扩展到三维水下环境,分别为光学图像配准、声纳图像配准和运动检测器设置了独立模块。设备可稳定运行,即使其中一个模块因环境原因不能提供相应数据,不影响整体运行。
现有研究明确了发展精确水下导航的必要性。Dinc提出了一种基于惯性导航系统的AUV 导航设备,融合了DVL、罗盘或压力深度传感器等其他辅助设备,并通过仿真实验验证了算法的正确性。He 等提出了水下同步定位测绘的综合方法。该设备配备了两台声纳,一台视觉摄像机、DVL、GPS,一个姿势和航向参考系统和其他传感器。5 个独立模块保证了该方法的机动性。同时采用前瞻声纳主动感知环境特征,在实际工程中应用效果较好。
原始声呐扫描系统也可用于AUV 导航,可利用扩展卡尔曼滤波器(EKF)估计机器人在单声纳工作周期内的位置,以保证扫描不失真。全局轨迹由另一个滤波器确定,采用增强状态EKF,一次完整扫描可对应一个设备姿态。
现有研究中,水下环境使用了不同的导航方法。正确的导航系统确保了结构缺陷和后续修复的定位准确。本文描述了一个模块化机器人系统,可协调多个定位传感器,对水下结构进行监测缺陷识别。
3 水下机器人检测系统概述
水下探测系统由两个可单独操作的模块组成。第一个模块是履带机器人,配备了两个履带驱动器,可以在水下基层上移动。第二个单元是一个可以在水下自由航行的远程操作飞行器(ROV)。两个机器人都由位于水面上方的操作员控制。由于该系统是模块化的,因此可以根据需求设置不同的应用配置。ROV 可以作为独立的检测平台,也可以与履带机器人共同工作。
履带式机器人配备了3D 声纳,用于水底导航、定位障碍物和移动物体。ROV 是一种轻型水下机器人,能够对各种设施进行目视检查。采用三个高分辨率摄像头分别对机器人前方、下方和上方物体进行监控。两个机器人都通过局域网连接到一个控制面板,该控制面板提供来自摄像机的高清图像流,并扫描3D 声纳数据。通信和电源由一个悬浮的多导体水下缆线提供。机器人使用控制软件进行高级图像分析,提供定位、移动平台导航和结构缺陷检测。
4 跟踪检查机器人
履带式机器人由一个可调不锈钢底盘和两个集成的履带驱动模块组成。该模块由直流电机、齿轮传动和水下密封装置组成。履带采用大螺纹弹性橡胶带,性能更加可靠。履带驱动相对于车轮的主要优势在于,通过最大限度地扩大接触面积,在凹凸不平的表面上提供了更好的牵引力,但仅限于硬表面。履带驱动器通过刚性连接安装在底盘上。此外,机器人还有一个防水外壳,用于搭载电力变压器、电机驱动器、局域网交换机和可编程逻辑控制器(计算机)。防水装置允许防水30 米深。机器人导航基于安装在可调节的支架上的三维声纳测量。履带式机器人的底盘可按照其他检查设备(如相机和照明设备),一般情况下,安装在ROV 机器人上的检查设备足以完成所需的任务。
声纳的性能需在水下进行测试。在平面视图中,很容易区分墙和障碍物,并测量物体之间的距离。三维视图提供了额外的障碍物高度信息,但需要对数据进行更详细的校准。在复杂的环境中,为了消除波束反射的不良影响和不同元素产生的噪声,需要调整声纳的距离。
履带式机器人在水下环境中的运动控制需要采用不同的导航方法。为了估计机器人在空间中的位置和姿态,可以使用描述飞行器运动的数学模型。
基于拉格朗日方程,采用能量法对机器人进行动力学描述。为了避免解耦拉格朗日乘子的建模问题,使用了Maggi 方程。在动力学模型中,首先计算动能,然后考虑所有外力。用于管道检测的履带式机器人的建模方法在现有文献中已有详细介绍。对于本文所描述的履带式移动机器人,可以用类似的方法导出模型。
5 水下ROV
5.1 ROV 的设计
ROV 是一种轻型水下平台,配有三个推进器,用于水平和垂直推进。推进器由直流电动机驱动,并由集成控制器控制,两个位于机器人的后部,通过改变偏航角实现前后运动。中央推进器提供垂直运动并保持机器人在设定的深度。该平台设计有正浮力,可用于紧急上浮。ROV 配备了集成控制器、惯性和压力传感器、视觉系统处理单元。控制器、电源和通信单元都密封在防水外壳中。
5.2 ROV 的可视系统
用于水下探测的ROV 有两种不同的任务。第一种是水下结构的表面进行扫描,分析其工作状态。第二项任务是检查水线以上的施工。为此,配备了两个相机来满足这些任务——一个单色高分辨率相机(500 万像素),用于拍摄和记录水下物体的表面;一个彩色,低分辨率变焦相机,用于水面上的检查和导航。另外还配备了一个额外的相机(130 万像素),固定在履带式单元上,这个摄像头位于设备底部,向下拍摄。高清检查摄像头放置在机器人前部的防水外壳中,配备了一个圆顶端口,可最大限度地减少由于空气-水界面造成的图像失真。变焦相机垂直放置在一个带有球形圆顶的防水外壳中,可以充分利用相机旋转扩大视野。当机器人浮出水面时,该相机也可以从水中浮出。
ROV 前部有两个高功率LED 灯头,波束角度为120°。一些低功率LED 灯位于设备两侧,相机配备独立光源。可视系统配备了四个激光模块,矩形布置,平行于高分辨率相机的光轴。激光模块被封装在防水外壳内,底座可调。这些模块产生红色激光,可测量结构表面的距离和方向,计算图像尺度,消除图像的透视畸变。
5.3 距离和姿态测量
水下巡检机器人的主要任务之一是对水下结构进行扫描,以识别和记录缺陷(主要是裂缝、损伤和腐蚀)。为了能够测量图像中的尺寸,需要测量设备到表面的距离和机器人的姿态。这对机器人控制系统也很重要,该系统必须自动保持机器人在一个理想的距离上垂直于结构移动。
激光点s 的图像通过焦距为f 的透镜投影到相机传感器上。四束平行激光束围绕相机轴对称排列成大小为a × b 的矩形。光束平行于光轴,并以对称的矩形形状排列。计算距离和姿态只需要三个点。引入冗余第四激光束,允许一个点为无法检测到的异常点,以提高系统的稳定性。因为激光束有时会打到裂纹或凹痕上,此时该光点会看不见或扭曲。
当捕捉到新的图像帧时,对其进行二值化,并计算出激光点的质心。利用泰勒公式,可以通过以下公式确定设备到每个点的距离zs:
式中,s 为光轴到激光点的距离,由a、b 确定,s’为在图像上的相应距离,f 为系统焦距,如图1 所示。
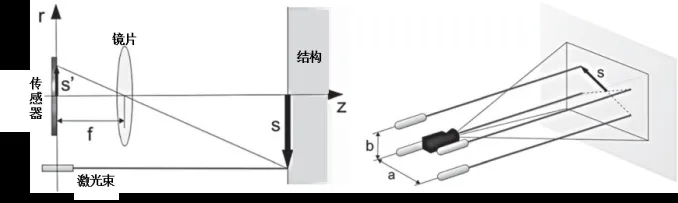
图1 相机模型中激光网点图像的形成
当光点距离已知时,可以通过简单平均和姿态角α、β 来确定光点沿光轴的距离,如图2 所示。
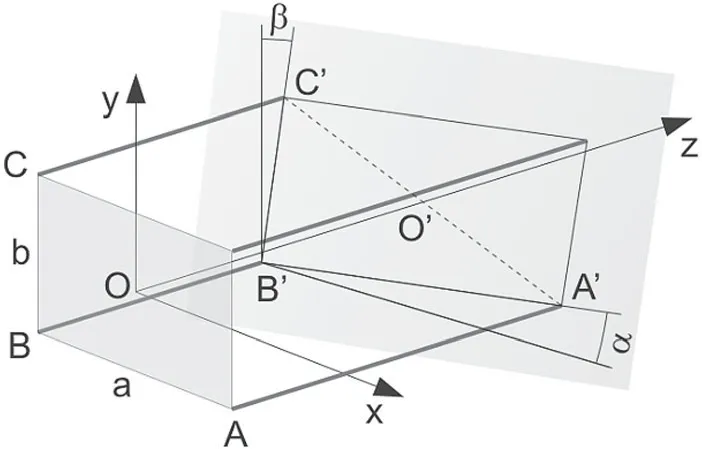
图2 距离和姿态确定
6 结论
本文提出了一种用于水下结构检测的机器人系统。模块化结构包括一个履带式机器人和一个ROV,可以协同监测位于水下的不同设施。推导了巡检机器人的数学模型,综述了巡检机器人的导航方法。同时还开发了水下移动机器人和水下机器人专用的图像处理和分析算法。第一种算法为机器人在结构表面上的位置和姿态测量。该方法简单、有效,可用于实时控制系统。第二种算法用于检测结构表面缺陷,尤其是裂纹。通过配备高分辨率摄像头的机器人进行自动检查,可以快速评估结构状况,还可以通过定期、可重复的检查,用于长期健康监测和维护计划。
