基于无人机摄影测量的大比例尺测图技术研究
2023-09-07刘柱
刘柱
关键词: 无人机 摄影测量 精度 大比例尺测图
中图分类号: P231 文献标识码: A 文章编号: 1672-3791(2023)15-0040-04
随着城市化的进展,大规模地形圖越来越成为构建智能城市基本地理信息的重要基础。无论是城市规划、自然资源动态实时监测,还是应对地震、山体滑坡等重大自然灾害,都需要准确、及时的地理信息的支持。各级政府需要在土地测绘、基本制图数据、环境监测、城市规划、新农村发展、资源监测、农林分析等领域提供大规模、快速、准确的地理空间数据。紧急情况和救灾工作日益紧迫,有效获取大规模地形数据、快速绘制地图已成为地理制图信息研究的重要领域[1]。大地测量和制图工作效率的显著提高、大地测量和制图更新周期的缩短、空间地理信息的快速准确捕捉成为大地测量和制图工作面临的新挑战。
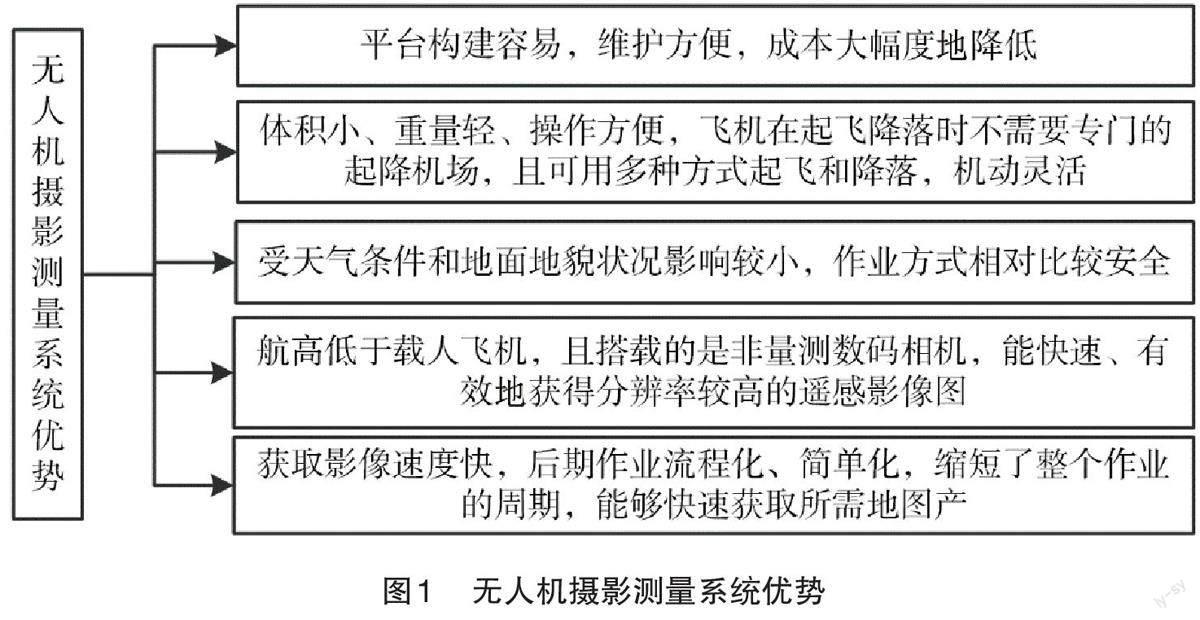
与以往的航空摄影系统相比,无人航空摄影测量系统具有诸多优势,具体见图1。正是这些优点使无人航空摄影测量成为传统航空摄影测量方法的重要补充。该方法在制图、地理信息等领域越来越受到重视,广泛应用于天气预报、土地与环境研究、海洋信息开发与动态管理、自然灾害预测、灾害监测与评价、国家海洋权益保护、农业监测与节能、水资源研究等领域。
1 无人机影像获取流程和技术路线
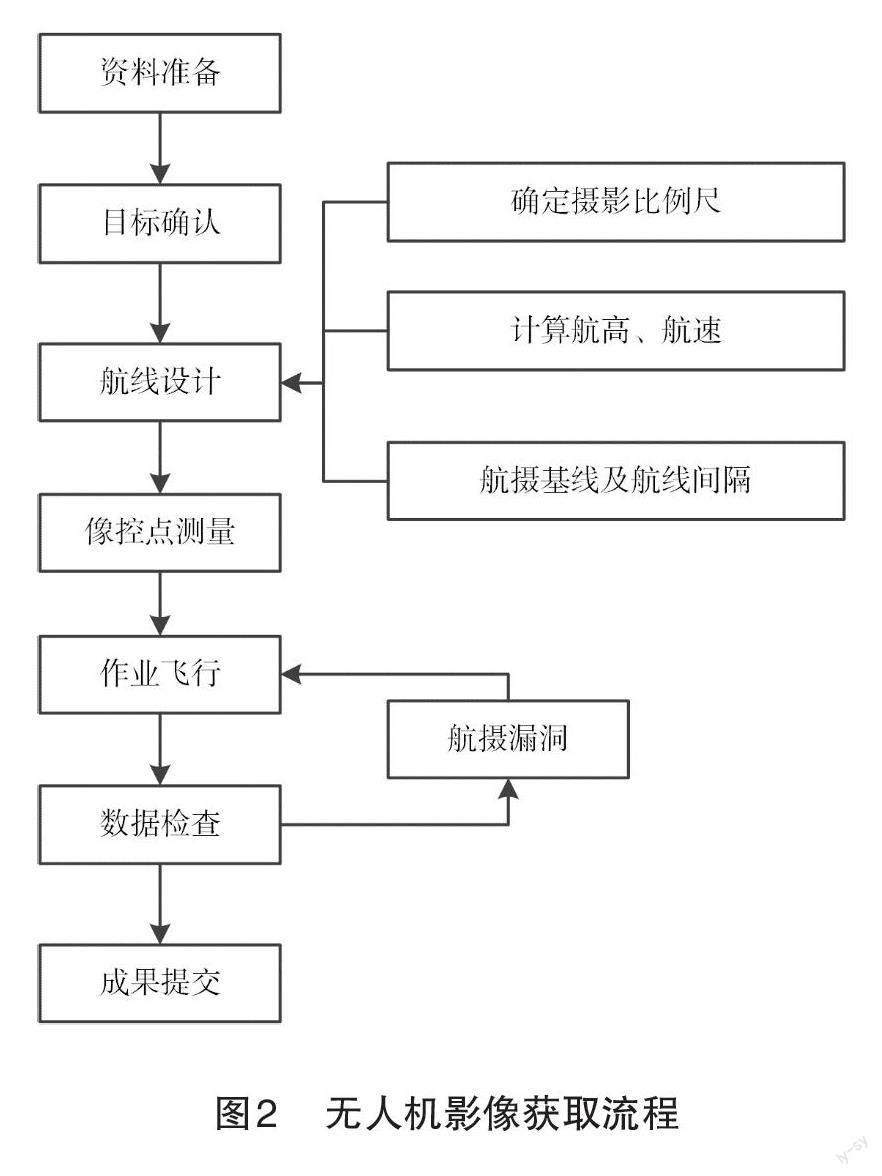
本文采用南方测绘“天行”八旋翼无人机搭载Sony RX1RM2 数码相机,在北京市某镇进行了生产作业,获取无人机低空航摄遥感影像并完成1∶500 大比例尺地形图的成图[2]。此次作业选用的数据处理软件是Smart 3D 三维实景建模软件和清华山维EPS 裸眼3D 测图软件。无人机影像获取流程如图2 所示。
1.1 测区概况
测区位于北京市某镇。该区域属暖温带半湿润半干燥季风气候,夏季气温高、雨量多,冬季寒冷干燥,且春秋短。全年无霜期达180~200 d。任务是对该地区约3 km2的旅游发展项目进行初步研究。
在开始之前,必须收集测量区域的现有数据。该区域的现有数据包括相关部门的3 个控制点,可以作为图像控制点配置的起点。此次作业的控制点坐标系采用1980 年西安坐标系和1985 国家高程基准。事先与甲方沟通,指明测量区域边界,沟通测绘区域难点、最大高差等相关信息[3]。
1.2 航线设计
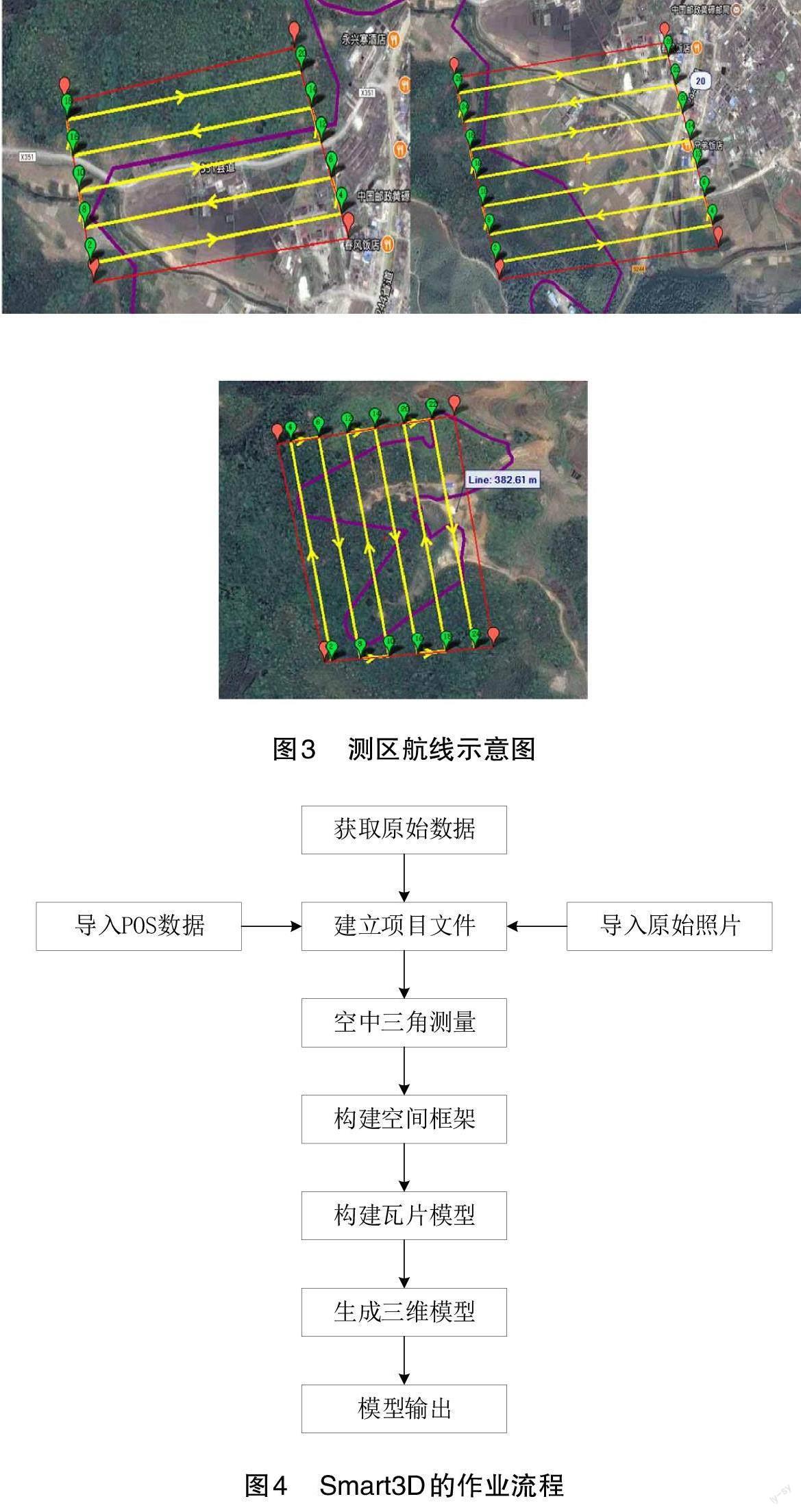
航线设计允许无人机根据给定轨迹执行飞行操作,从而确保所有飞行参数对应于相关轨迹。路线规划的有用性取决于最终的结果,设计必须符合相关的规范,并进行测试以确保飞行过程的安全性和飞行数据的可靠性。航线计划见图3。
1.3 外业像控点测量
为确保测量操作的准确性,现场影像检查点的布置严格遵循野外影像控制点设置的原则。共设置了76 个影像像控点。用于测量的坐标系为1980 年西安坐标系,1985 国家高程基准,114°中央子午线。结合GPS-RTK 和CORS 数据,以3 个已知控制点作为平滑采集的起点,计算结果的平面和高程精准符合标准要求[4]。
2 内业数据处理
从两个测绘区域获取图像后,使用Smart 3D 软件进行内部数据处理。该软件是一个自动航空图像处理软件,结合了数据导入、空间加密和三维建模。该程序高度自动化,可为EPS 裸眼3D 软件生成OSGB 格式的数据[5]。该程序生成高精度、结果良好的三维模型,进行满足模型要求的大规模绘制。Smart 3D 软件中的数据处理步骤见图4。
2.1 航测原始数据的导入
首先将本次航测获取到的记录飞行姿态的POS 数据、影像数据和像控点数据在数据导入界面导入到Smart 3D 中,完成航测数据的录入工作。
2.2 空中三角测量
设置好像片的相关属性后,选择提交空中三角测量,可以设置空三的名称,定位、参考方式以及其他设置等。如果对一次空三加密的计算结果不满意,Smart3D 可以进行多次提交空三加密,直到符合精度要求[6]。此次试验共进行了2 次空三加密。
2.3 构建三维模型
空三加密完成后,开始创建三维模型。Smart 3D模型的构建非常自动化,要求创建OSGB 格式的瓦片模型。为了加快模型生成的速度和精度,需要在整个研究领域中创建空间框架,并选择生成的模型范围。根据计算机的性能和测区的实际状态,整个区域被分割成49 个瓦片。
该项目随后提交生产,Smart 3D 可以创建三维网格、三维点云、正射影像和DSM。可以根据不同生产项目的需要生成不同类型的数据。
2.4 数据成果
经过上述步骤,就完成了内业处理的整个步骤,再经过对后续成果整理和修饰,就可得到测区的数字三维模型,见图5。
3 精度分析
精度分析主要采用GNSS-RTK 系统对测量范围内可视位置的平面坐标和高度进行测量,然后选择DLG上的坐标和高度。使用均方误差公式计算平面精度和高程精度。检查点主要选择影像容易识别的可视点,如斑马线、路标垂直转弯、平房拐点、水泥路交叉口等。
3.1 平面精度分析
利用GNSS-RTK系统对测区内20个明显的地物点实测其平面坐标和高程,然后在数字线划图上选取该点的图上坐标和高程,最后利用中误差计算公式计算其平面精度和高程精度,得到测区检查点的平面精度统计结果:X 方向中误差为0.066 m,最大误差为-0.109 m;Y 方向中误差为0.089 m,最大误差为0.155 m;平面坐标中误差为0.111 m,最大误差为0.199 m,均满足规范要求。具体如表1所示。
3.2 高程精度分析
同样可以算出测区的高程误差和精度,如表2 所示。从表2 可得:测区的高程中误差为0.275 m;最大误差为0.439 m;该测区地形起伏不大,大多属于平地和丘陵地,满足1∶500 地形图对高程精度要求。
4 结语
系统阐述了无人机摄影测量系统在大比例成图中的完整流程,通过实例精度分析,可以得到结论:在控制好成图过程误差传播,严格按照规范要求获取影像数据,数据处理过程严格把关,无人机航测大比例尺地形图可达到1∶500 比例尺的成图精度,尤其是在平原地区平面精度和高程精度都很高,可以在该地区应用于生产实践。
