GPS辅助空三测量的应用案例分析
2015-10-09郭燕平王永秋
郭燕平++王永秋

摘 要:GPS辅助空中三角测量是目前国内在中、小比例尺及困难地区成图航空摄影测量一般采用的模式。该文结合湖北航空摄影项目,对GPS辅助空中三角测量在技术方案、飞行实施、外方位元素解算以及精度评定几个方面作阐述和分析。
关键词:GPS辅助空中三角测量 摄影测量 区域网平差 精度
中图分类号:P23 文献标识码:A 文章编号:1672-3791(2015)06(c)-0053-02
GPS辅助空中三角测量即是基于载波相位差分GPS动态定位技术或精密单点定位技术获取航摄仪曝光时刻摄影中心的三维坐标,将其作为观测值参与摄影测量区域网平差,采用统一的数学模型和算法整体解算物方点位和像片外方位元素,并对其精度进行评定的技术和方法。
经过20多年的理论研究、实际试验和大量的生产实践,我国建立了较为完整的GPS辅助空中三角测量理论,从机载GPS相位中心与航摄仪投影中心的几何关系出发,建立了GPS摄站坐标观测方程,将其引入摄影测量区域网平差,构建了GPS辅助光束法区域网平差的完整数学模型;自行研制了两套具有GPS辅助光束法区域网平差功能的摄影测量加密软件WuCAPS(Wuhan Combined Adjustment Program System)和Geolord-AT;建立了比较完整的GPS辅助空中三角测量技术框架,制定了相应的国家测绘行业标准,用于指导我国的航空摄影测量生产。这些已经极大的简化了航空摄影测量作业工序,形成了具有中国特色的GPS航空摄影测量实用生产技术体系。
1 技术方案及飞行实施
GPS辅助空中三角测量前期生产过程包含航摄设计、地面控制、航摄飞行、航后GPS数据检核及预处理等几个方面,后期内业处理主要是带GPS数据的区域网平差过程(如图1)。下面笔者以本部执行的湖北航摄项目为实例对GPS辅助空中三角测量从技术设计以及飞行过程进行阐述。
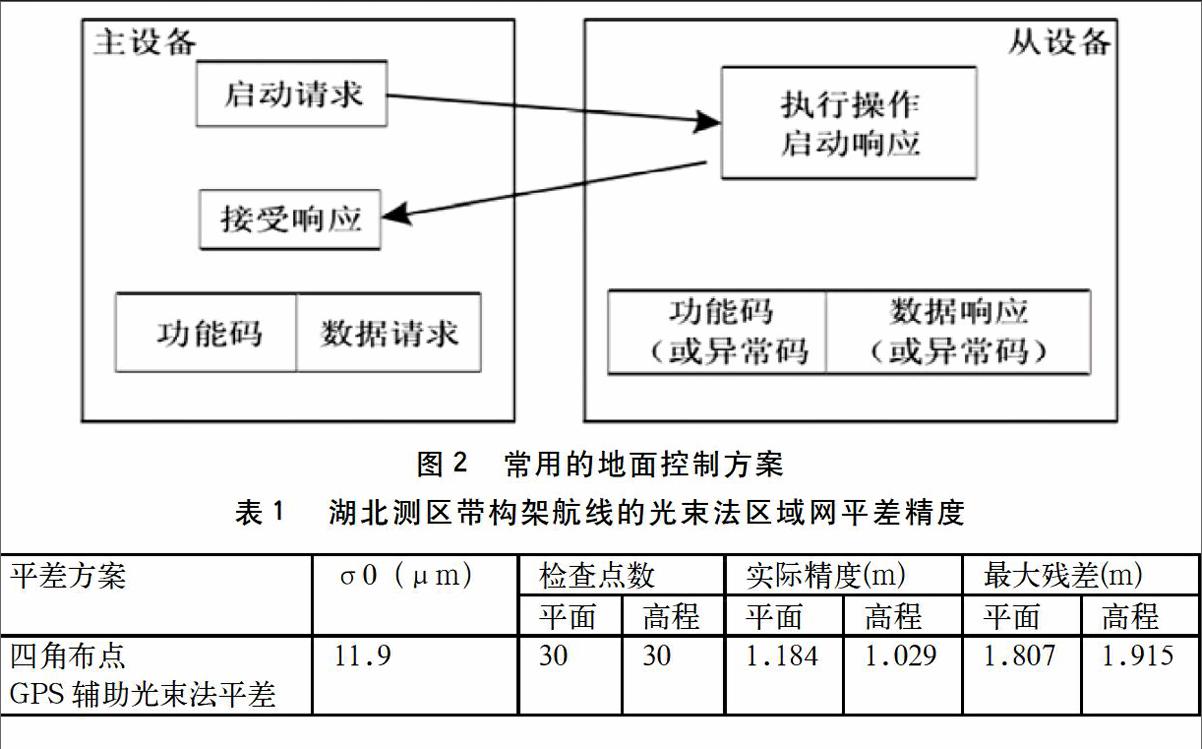
1.1 地面控制方案
GPS辅助空中三角测量地面控制的方案常见的有两种,见图2。地面控制部分按照GB/T 18314-2001《全球定位系统(GPS)测量规范》除需要进行地面基站的测设外,还要进行航摄期间基站的同步观测和平高点、检测点、水准点测量期间基准站的连续观测、加密分区四角平高点的布设和测量、精度验证区检测点的选测以及水准点的GPS测量,并绘制点之记。
对空地标点采用四角布点法,按照《GPS辅助航空摄影技术规定》点位布设在构架航线与加密分区首末测图航线重叠处,位于测区自由图边处的地标点位应尽量布设在图廓线外。为了检验GPS辅助空中三角测量的精度,航摄像片提供后在检测样区内选刺30个点进行检测,所选检测点除满足GPS观测要求外,还选择在像片上影像清楚的明显地物点上,并均匀分布于平地、丘陵和山地,使野外检测点有较强的地形类别代表性。对于上述所有点位,都要做GPS测量取得其WGS-84坐标下的精确坐标。
1.2 航摄技术设计
按照GB/T 19294-2003《航空摄影技术设计规范》以及GB/T 15661《1:5000 1:10000 1:25000 1:50000 1:100000地形图航空摄影规范》,该研究者充分考虑地形因素将该摄区分成了若干个加密分区,并通过加密分区四角平高控制点加构架航线的地面控制方案来改正GPS摄站的坐标系统漂移误差控制精度。构架航线垂直于测图航线,设计的基本要求是比测图航线的比例尺小20%左右,航向重叠不小于80%,并且延长出航摄区域4到6条基线,控制航线交叉或衔接处要有不少于四条基线的重叠。
四角平高点位置及时报予地面控制方案执行部门并纳入其地面测量技术设计中,也是在实际飞行中能够观察到的对空地标点。
1.3 航空摄影飞行实施安排
在实际飞行实施过程中,保证地面基准站与机载GPS同步观测。每个架次准备飞行前,通知地面基准站开机,这样就保证了起飞前机载GPS接收机静态观测有正常的基站数据参考。起飞前进行GPS接收机的初始化测量,采用GB/T 18314-2001中规定的GPS静态定位测量方法,其间,应严格防止各种原因遮挡机载GPS天线造成的GPS信号失锁。记录好GPS接收机的初始化时间以及静态观测起止时间。
航摄飞行作业中采用GB/T 15661对飞行和摄影质量的要求确保GPS接收机正常工作,并按GPS辅助航摄飞行记录单对地试、前试、每条测线以及后试对应的首末MARK号码以及航片数做好记录。在航行过程中,要严格按照规范要求执行,根据精度控制的相关理论要求,同一加密分区构架航线与首末测图航线不能断开飞行,但是为保证飞行效率,飞行过程中可以灵活调节测图航线与控制航线的飞行顺序;为了保证摄影以及数据采集质量,航行过程中对设备的操作以及飞行方式要充分掌握好,飞机出航线后转弯坡度不要太大以免造成对GPS天线的遮挡而导致GPS信号失锁,影响GPS数据采集。
航摄飞行结束落地不动后,进行GPS静态观测,观测时间10分钟左右。飞行结束后及时下载数据做GPS数据检核及预处理,检查机载设备数据记录的完备性,并备份数据。
关于航摄飞行漏洞的补摄,尤其要注意的就是在敷设构架航线的测区,补摄航线两端必须超出构架航线外至少一条基线。
2 像片外方位元素的获取及样区加密精度验证
GPS辅助空中三角测量依然遵循传统的空三加密工序,从投影中心与机载GPS天线相位中心几何关系出发,将差分GPS获取的摄站点坐标,作为带权观测值引入自检校光束法区域网平差中进行GPS导航数据与摄影测量观测值的联合平差,采用统一的数学模型和算法整体解算像片的外方位元素和加密点坐标,但是具有GPS辅助光束法区域网平差功能的摄影测量加密软件WuCAPS极大的简化了操作流程。WuCAPS是在Windows环境下,用面向对象的Visual C++和Fortran语言开发的一个用于摄影测量与遥感高精度点位测定软件包,它以共线条件方程为核心,融合当代基于统计理论的误差随机模型和理论上最为严密的自检校光束法区域网平差函数模型于一体,以程序实现了光束法区域网平差一整套算法。目前,该系统正在测绘生产单位、科研部门、和学校教学中广泛使用。
为了测定GPS辅助空中三角测量航摄成果的精度,该研究者在样区内布设了布设30个检测点(点位分布如图五所示)。所有点都采用GPS静态测量方法进行测量,得到WGS84下的大地坐标及其椭球高,并转换到西安80坐标系和1985国家高程基准下的坐标。利用武汉大学自行研发的WuCAPS软件进行带四角高程控制的GPS辅助光束法区域网平差得到样区全部像片的外方位元素和加密点的地面坐标。利用30个检测点评定的加密成果精度如表1,由表1显示来,检查点精度满足GB/T 13990-1992《1:5000、1:10000地形图航空摄影测量内业规范》成图精度要求,1:5000航测成图,检查点不符值:平面<2.5m,高程<2.0m(山区地形)。说明GPS辅助光束法区域网平差得到的外方位元素精度可以满足后续内业加密和测图等工序的精度检查和比较使用。
3 综述
综上所述,GPS辅助空中三角测量可以大量减少地面控制点,而且带地面控制的GPS辅助光束法区域网平差精度能够满足1:5000地形图生产。无论平地区域还是丘陵地、山地区域,采用GPS辅助光束法区域网平差,精度达能到自检校光束法区域网平差的精度。GPS辅助空中三角测量已经成为一种极为实用、经济的摄影测量加密方法,其在测绘生产中的应用已经逐渐改变了航空摄影测量一贯遵循的“航空摄影—外业控制联测—内业测图”的长周期作业模式。它在缩短航测成图周期、节省外业控制工作量、减轻劳动强度等方面已经创造出了巨大的经济和社会效益。
参考文献
[1] 袁修孝.GPS辅助空中三角测量原理及应用[M].北京:测绘出版社,2001.
[2] GB/T18314-2001,全球定位系统(GPS)测量规范[S].2001.
[3] GB/T 19294-2003,航空摄影技术设计规范[S].2003.
[4] GB/T 15661-2008,1:5000 1:10000 1:25000 1:50000 1:100000地形图航空摄影规范[S].2008.
[5] GB/T 13990-1992,1:5000、1:10000地形图航空摄影测量内业规范[S].1992.
