国外无人机地面控制站的现状和发展
2023-09-06诸葛卉
诸葛卉
今年3月14日,美国一架通用原子航空系统公司的MQ-9“死神”(Reaper)无人机在黑海水域上当天因剧烈的空中机动动作失控后坠入黑海,这是美国无人机首次在该地区坠毁;2021年7月,根据一份外国军事总销售协议——包括4架MQ-9A第5批次(Block 5)飞机和4架移动地面控制站以及相关支持设备,通用原子航空系统公司为荷兰皇家空军(RNLAF)完成第一架MQ-9A 第5批次无人机和地面控制站(GCS);2020年6月,通用原子航空系统公司赢得国民警卫队(ANG)合同,升级MQ-9第1批次和第5批次和第25批次双控制模块地面控制站(DCMGCS)和第30批次地面控制站,订单包括用于高清显示器、“巴雷特”非对称数字数据链路计算机(BADDC)和多智能智能处理(MISP)的套件。
根据美国空军的预算文件,将对未来技术进行重大投资,用于开发下一代空中优势(NGAD)战斗机、合作式作战飞机(CCA)无人机、B-21“突袭者”隐身轰炸机和“哨兵”洲际弹道导弹等未来作战装备,合作式作战飞机无人机将与下一代空中优势战斗机协同作战。
无人机在全球反恐战争中所取得的巨大成就显示了机器人系统潜在的军用价值;网络中心战的概念颠覆了传统的信息获取方式,作为网络中心战的重要节点,无人机的发展无疑将对未来作战模式产生重大影响。鉴于无人系统的显著优势,国外计划在未来25年内发展和使用越来越复杂、技术越来越先进的无人系统。同时,无人系统必须能与有人系统或其他无人系统综合,以充分发挥其作战效能。
无人机航电系统是在飞机航电系统的基础上进行设计的,继承了飞机航电系统的一些特点,但也有自身的要求。一套无人机系统是一个异平台分布系统,各平台之间通过有线和无线通信,所以一套无人机航电系统是由无人机系统空中部分、地面控制站和发射回收系统三个相对独立的部分组成,其中无人机系统空中部分和控制站尤为重要。无人机航电系统的三个独立局域网具有扩展性,它们各自可以和外界发生信息交联和互操作。
无人机地面控制站的典型功能
无人机地面站系统是整个无人机系统的指挥控制中心,专门用于对无人机的地面控制与管理,是在现代无人机的发展和应用过程中逐步提出的。为了能更好地监视无人机的飞行状况,并对无人机进行遥控,人们设计了各种类型的地面站,辅助操作员对无人机的各种飞行数据和任务设备状况等进行实时地监控,在一些应急情况发生时能及时地采取相应处理措施来保证无人机的安全。
地面控制站可以是陆基、舰载的,也可以综合到指挥与控制飞机上,从长远来看,可能综合进其他战术飞机的驾驶舱里。选择空中控制站能提供最大的靈活性,但是会带来小型化和综合化问题。因此,在控制站最初论证时,一般都采用地面控制站进行。
据数据统计表明,地面系统所需成本非常高,往往是单架无人机成本的0.5~4倍之间。这说明,研制一个能够控制多种类型无人机的通用地面控制系统,不仅可以极大地降低无人机系统的开发、后勤支持和训练费用,也可以较大程度地改进无人机系统作战的灵活性,从而实现无人机系统之间的互操作性。
地面控制站也称任务规划与控制站。任务规划主要是指在飞行过程中无人机的飞行航迹受到任务规划的影响;控制是指在飞行过程中对整个无人机系统的各个系统进行控制,按照操作者的要求执行相应的动作。
国外无人机地面站现状
无人机地面站应包括从发射准备到回收、需要系统干预和/或确认系统完好性的所有单元。目前,一个典型的地面控制站由一个或多个操作控制分站组成,主要实现对飞行器的控制、任务控制、载荷操作、载荷数据分析和系统维护等。其相互间的关系如图2所示。地面站软件是无人机地面站的重要组成部分。操作员通过地面站系统提供的鼠标、键盘、按钮和操控手柄等外设来与地面站软件进行交互,以在任务开始前预先规划好本次任务的航迹,飞行过程中对无人机的飞行状况进行实时监控和修改任务设置,以干预无人机飞行,任务完成后还可以对任务的执行记录进行回放分析。
MQ-9“死神”系列无人机的地面控制系统
2023年2月8日,美国海军航空系统司令部授予通用原子航空系统公司订单,为MQ-9A 第5批次“远征中空长航时无人机系统”无人机发挥出作战能力采购8套移动式地面控制站和6套地面数据终端,支持美国海军陆战队。该地面控制站安装在长度为10m的独立拖车内,内有遥控操作的飞行员、监视侦察操作手的座席和控制台,三个波音公司的任务计划开发控制台、两个合成孔径雷达控制台,以及卫星通信、视距通信数据终端。
(1)“死神”无人机地面站功能
“死神”无人机新的可认证地面控制站(CGCS)基于卫星通信的自动起飞、着陆和滑行,便携式飞行前/飞行后设备(P3E)以及任务情报中心,功能包括飞行监控、导航、任务载荷、任务规划、一个C波段可视数据链或者一个超视距用的Ku波段卫星数据链等。其中,任务规划功能如下:
(a)点击用户接口;
(b)实时地图漫游;
(c)应急航路规划;
(d)支持多无人机规划;
(e)显示经纬度或UTM中的坐标;
(f)基于航路点的无人机性能自动校验;
(g)对地形间隔快速检验;
(h)视线和卫星可见性检测;
(i)一个C波段可视数据链或者一个超视距用的Ku波段的卫星数据链。
(2)“死神”无人机地面站组成及装备
“死神”无人机主要由飞行控制站、任务载荷控制站和合成孔径雷达控制站组成,分别由无人机操作员(AVO)、任务载荷操作员(PO)和合成孔径雷达操作员(SARO)三人进行操控。
无人机操作员负责对无人机进行操控,包括起飞、着陆、飞行中姿态控制等。
合成孔径雷达操作员:负责控制和监视无人机的雷达,并对其图像作有限处理。操作员的操控包括对TV相机、红外相机、内置雷达等,雷达可同TV相机或红外相机同时操作。
(3)“死神”无人机地面站装备
CGCS包括高清显示器、巴雷特非对称数字数据链路计算机(BADDC)和多智能智能处理(MISP)的套件。BADDC充当有效载荷数据复用器,并致力于增加无人机在其通道和带宽限制范围内通过数据链路发送传感器信息源的數量;与BADDC互动的数据来自无人机的机载传感器,并将数据转发到一个独立的通道——可通过数据链路传输多个传感器信息源。该高清显示器套件和BADDC允许提高MQ-9和地面控制站之间的吞吐量和传感器数据的质量,MISP实现了地面控制站和外部网络之间的无缝数据流。该人机界面由4个液晶显示器组成:
(a)最上方的显示器显示无人机航路规划和数字地图叠加信息;
(b)中间的显示器则实时显示无人机头部的彩色摄像机拍摄到的画面,其作用相当于有人驾驶战斗机上的平视显示器(HUD);
(c)最下方的两个显示器则显示各种传感器采集到的信息、图像、战术信息、飞机状态和飞行仪表等内容,相当于有人驾驶战斗机上的多功能下视显示器(MFD);
(d)在地面控制站系统的右侧安装有操纵杆,而在座舱左侧安装有油门杆,十分符合美军战斗机飞行的侧杆操纵习惯;
(e)地面控制站系统可装在很多移动平台上,如车辆、舰船甚至大型飞机上,以便操作人员在远离战场千里之外的任意地点对“死神”系列无人机进行遥控。
(4)“死神”无人机系统的地面遥控方式
“死神”无人机和地面控制系统都装备L-3通信公司提供的C波段数据链系统终端和Ku波段卫星数据链系统通信终端,这样即使在地球的另一端也可对“死神”系列无人机进行遥控。飞机本身还装备了特高频(UHF)和甚高频(VHF)无线电台(VHF(30~300MHz)、UHF(300~3000MHz)无线电波主要是作较短途的传送)。
(a)通过C波段数据链对无人机进行视距(LOS)遥控,其遥控范围可达280km,主要适用于无人机的起飞和降落阶段的近距离通信;
(b)以一架无人机作为通信中继机对战场前沿的另一架无人机进行远程遥控;
(c)以一架无人机和一个地面控制系统分别作为通信中继机和中继站对战场前沿的无人机进行远程遥控;
(d)通过Ku波段的卫星数据链中继对远在万里之外的无人机进行遥控,并传送任务控制信息以及侦察图像信息。图像信号传到地面站后,可以转送至全球各地指挥部门,也可直接通过一个商业标准的全球广播系统发送给指挥用户,因而指挥人员可以实时控制“捕食者”进行摄影和视频图像侦察。
德事隆系统公司无人系统用Synturian地面控制站系列
德事隆系统(Textron Systems)公司无人系统引入了部分Synturian地面控制站系列产品,是一种多域控制和协作技术,增强了态势感知能力。
该产品系列包括Synturian Control和Synturian Remote两部分。Synturian Control是一个多平台、多运载器、多域的控制系统,增强信息的协作和传播;Synturian Remote包括移动、强化网络工具,通过及时的信息和协作增强态势感知。
Synturian系列产品围绕面向服务的架构设计,用于集成货架软件,拥有一个直观、支持培训和物流的界面。
德事隆系统公司把Synturian系列产品与自身无人机系统整合,包括与“影子”战术无人机系统和“探空器”小型无人机系统以及通用无人水面舰艇(CUSV)相集成,已完成了该产品与“影子”、“探空器”和该公司任务平台上远程终端功能的演示。
航空环境公司Crysalis下一代地面控制解决方案
2021年7月,航空环境公司发布Crysalis地面控制解决方案。Crysalis是一种基于硬件和软件的集成地面控制系统,旨在通过直观的用户体验(UX)为航空环境公司无人机系统及其有效载荷提供指挥和控制。
Crysalis系统提供可互换性,无论是模块化元组件还是交钥匙系统均适应特定任务要求;与Android、Microsoft Windows和Linux操作系统跨平台兼容。
Crysalis系统设计有直观的用户界面,旨在减少认知负荷和训练负担,同时增强态势感知和战场协作。用户可通过快速访问关键信息、工作模式和遥测元数据来规划和执行飞行任务,以及导航和控制无人机和有效载荷。其他用户可以通过远程视频终端访问遥测和下行链路数据,获得态势感知、信息共享和战术决策协作,并允许他们直接在设备上截获数据。
皇家空军的无人机地面控制站
近日,英国公开了沃丁顿皇家空军基地里的无人机仓库,这里停放着隶属于英国各个军种的多个无人机型号,从只有火柴盒大小的“黑色大黄蜂”到最大起飞重量(质量)超过450kg的“守望者”,一应俱全,图为无人机操作指挥系统。
地面控制站将采用新型开放式体系结构
无人系统将允许操作员将他们的感知和能力在战场上体现出来,这是无人机和巡航导弹之间的区别;操作员接口是一个关键组件,是另一个可以升级改进的巨大领域。
下一代无人机系统将包括地面控制站与能够支持多个任务目标的无人机之间的多对多关系。提供这种多任务能力所需的系统将包括由多个地面控制站控制的自协调无人机,以及无人机和载人飞机以及空间系统的相互配合,以满足不断变化的一组任务标准。
美国国防部、英国国防部以及未来机载能力环境(FACE)、无人机控制段(UCS)、开放式任务系统(OMS),以及包括网络中心环境设计等政府和工业联盟均试图为无人机系统开发人员定义这些要求——无人机和地面控制站的设计者必须确保网络中心环境中的所有参与者能够接触其能力的每一个要素。为此,美国国防部在其“2007—2032无人系统路线图”中提出了下一代无人机系统所需基础技术的发展计划。该愿景在北约论坛的无人机系统倡议中也得到了响应。该无人系统路线图定义了6个目标,其中两个目标特别相关:强调通用性,以实现无人系统上的系统控制、通信、数据产品和数据链路之间更大的可互操作性;促进制定政策、标准和程序,确保安全、及时地作战,并有效整合有人机和无人机。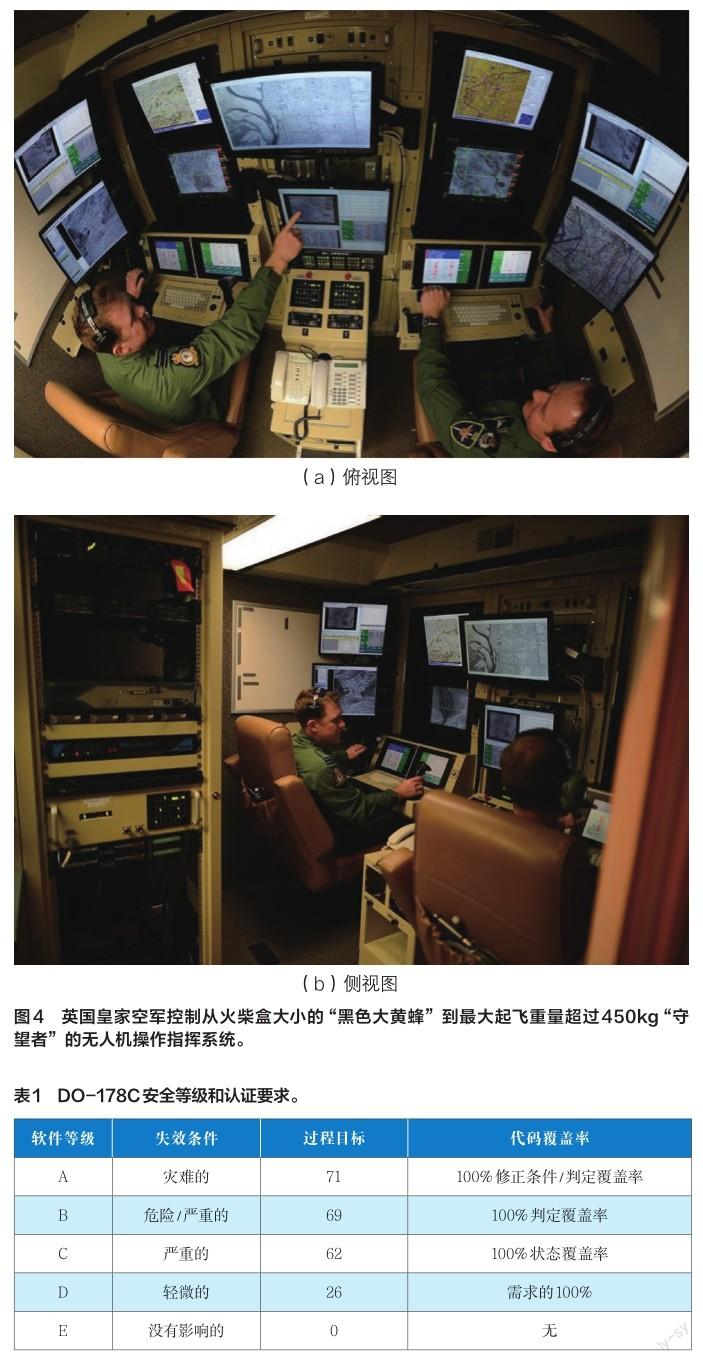
要在开放式架构内实现有意义的互操作,在不同时间、不同硬件、不同软件架构、不同技术和不同数据用途构建的不同系统必须易于和有意义地集成。国防部已经确定,实现这一目标的关键是指定一个通用语义的数据模型,所有需要交换的数据均被严格地定义、描述和记录。
安全是联邦航空管理局的首要问题,它遵循RTCA/DO-178C软件安全认证标准。DO-178C目标要求开发代码时特别注意可测试性,见表1。 代码必须具有确定性,才能实现可重复的测试结果。
一种在兼容实时性的数据分发服务中间件上构建组件的系统设计方法使开发人员能够实现对军用和商用無人机开放式架构和安全认证的要求,同时减少开发时间、成本和风险。
DDS是由对象管理工作组(OMG)标准化的一组规范,核心是基于无互连架构上实现实时软件数据总线,如图5所示。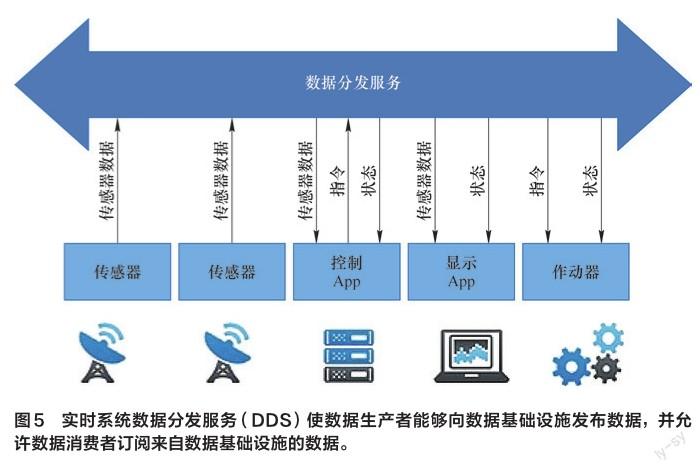
数据分发服务使用发布—订阅通信模式,使数据生产者能够向数据基础设施发布数据,并允许数据消费者订阅来自该数据基础设施的数据。在数据分发服务实现中,数据被从物理源和目的地抽象出来,并允许订阅该物理源和目的地的任何应用访问,而与源的位置和传输数据的特定链接技术无关。
通过开放式架构指南(包括FACE、UCS和OMS)标准化了无人机中数据分发服务的使用。数据分发服务实施可认证至DO-178C中的A级,包括认证机构要求的流程和测试工件。这种方法大大减少了必须评估的自定义代码的数量,节省数百万美元的认证成本。
以美国海军的通用无人机地面控制站的战术控制系统(TCS)为例,如图6所示。战术控制系统提供了一个开放式体系结构软件,能够控制多种不同类型的海上、岸上计算机硬件,实现任务规划、指挥与控制以及情报数据接收和分发等功能。
北约以STANAG 4586为出发点,对无人机指挥与控制接口进行了定义。该STANAG 4586以模块化的方式,通过开放式接口实现了对平台的基本框架和传感器控制功能的标准化。STANAG 4586是一个良好的开端,但美军需要其具有发射武器功能,控制的传感器也不仅仅是光电/红外设备,已引入了多种STANAG 4586无法支持实现的新型传感器。
现有控制系统的局限性
目前,使用地面控制站的架构最早可追溯到MQ-1“捕食者”无人机的早期概念论证阶段。这种老旧的地面控制站已经被证实不能适应“捕食者”无人机日益复杂的作战功能和不断升级的技术要求了。从2003年参加伊拉克战争迄今,美军投入实战的90余架“捕食者”系列无人机,超过一半已彻底损失。美军的统计表明,无人机的损失除了敌方的地对空火力、恶劣的自然环境和空中相撞事故等原因外,还有一个主要的原因就是“人为因素”,即由于地面操纵人员的失误而引发的坠毁事故。“捕食者”无人机地面控制站采用的是20世纪90年代的技术,根本不符合人机工程学的设计理念,如要从一架“捕食者”无人机上发射一枚“地狱火”弹,须在下拉式菜单中点击鼠标以进行一系列不同的操作,这样的复杂操作多达17次,而在F-16战斗机的座舱中,要用按一个按钮就可以;发射导弹和关闭发动机用的按钮设置得太近,容易造成误操作。显然,现有简陋的地面控制系统已经不能满足“捕食者”无人机系统面临的日益复杂的任务要求了,美国空军急需研制新一代操作界面更为友好的无人机地面控制系统。
“捕食者”的数字信息通信链路被设计专门使用商业Ku波段,与现在投入使用的空军新一代高性能宽带全球通信卫星(WGS)不兼容,WGS卫星在Ka和X频段工作。这一设计使“捕食者”的使用成本大大增加:至2012年美国国防部约花费2500万美元Ku波段能力用于支援大约200架次的“捕食者”或“死神”无人机的巡逻任务。
无人机地面控制站发展新趋势
随着无人机技术的新发展,无人机地面控制站呈现出新的趋势:
美国空军研究远程控制无人僚机
2023年2月,美国空军正在研究无人僚机是否可以由附近的作战管理平台或加油机的操作员远程控制。
合作式作战飞机(CCA)执行任务时,可能会由附近的飞机进行部分引导,如KC-46“飞马”加油机或E-7“楔尾”预警机。美国空军希望合作式作战飞机能够与下一代空中主宰战斗机或F-35战斗机协作执行包括打击目标、执行情报、监视和侦察等任务,或干扰敌方信号等电子战行动。无论是有人战斗机还是其他飞机,都必须解决许多与合作式作战飞机的引导方式有关的更细微的问题,例如,如何与有人机组队、能否在加油机或预警机上远程控制等。
2022年10月,米切尔航空航天研究所发表的一篇关于无人僚机的论文中也提出了此项建议。米切尔航空航天研究所提出的一个模型设想了一群无人机由附近E-7“楔尾”的空战管理人员指挥,并敦促空军尽快将重点放在改进与无人机的交互方式上。
有人/无人编队硬件和技术及工程
2022年12月12日,由空客公司牵头的团队进行了未来空战系统(FCAS)首次大规模多域飞行演示(MDFD),也是未来空战系统“有人-无人编队”(MUM-T)演示项目第二阶段的成果展示。该项目由德国联邦国防军装备、信息技术和现役支持办公室(BAAINBw)资助,现已进入第三阶段。该项目现已进入第三阶段,计划2030年完成初步部署。
除空客公司外,参与该飞行演示的还包括德国联邦国防军、芬兰国防军、欧洲导弹德国公司、Patria公司、HAT. tec公司和Robonic公司,主要内容为整合各种有人-无人平台。在飞行演示期间,在芬兰罗瓦耶尔维上空飞行的不同平台通过网状机载网络数据链路互联,其中1架里尔35客机用于代替战斗机,机上的机组人员负责指挥代替远程载具飞机的5架Do-DT25无人机,1架模拟战斗机代替承担指挥控制角色的飞机。在5架远程飞机中,两架集成了欧洲导弹集团的电子支援措施传感器,用于识别一个虚拟的敌方地空导弹阵地,另外3架配备光电相机。在飞行演示期间,地面部队通过前置部署的联合终端、攻击控制员请求近距离空中支援,以抓捕虚拟的敌方人员。此外,一架空客H145M直升机与一架配备光电相机的远程飞机一起部署,负责监控并向特种部队提供侦察数据。
高空长时运行赋能的强韧网络
2023年2月2日,美国空军研究实验室(AFRL)授予位于加州圣迭戈的立方体防务应用公司(Cubic Defense Applications Inc.)合同,研发高空长时运行赋能的强韧网络(Halo-Enabled Resilient Mesh,HERMes)软硬件原型。
立方体防务应用公司将为美国空军研究实验室调研、设计、开发、测试和演示高空长时运行赋能的强韧网络(Halo-Enabled Resilient Mesh)能力,并扩展高容量骨干通信系统的技术能力,包括开发用于该系统的硬件,增加工作频率范围,优化系统中使用的代码和算法,研究备选能力以扩展运行操作平台的类型和数量。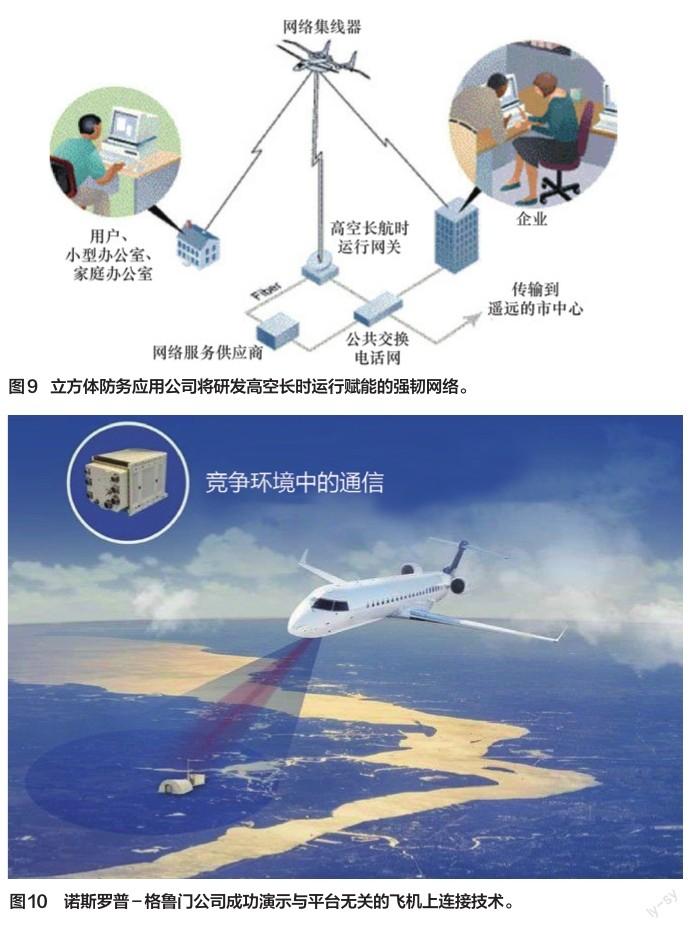
美国空军演示与平台无关的机上连接技术
2023年3月23日,诺斯罗普-格鲁门公司成功展示了连接整个飞机生态系统的技术能力。该公司在美国空军马里兰州帕图克森特河海军航空站的诺斯罗普-格鲁门公司飞行试验台上展示了其软件可编程开放任务系统兼容(SPOC)多功能处理器,使用先进的波形与地面站进行实时空中测试,突出了使用高级数据链路集成现有和未来平台的能力。
软件可编程开放任务系统兼容等先进技术为美国空军提供了小尺寸、重量和功率的无线电,并且可扩展,可升级和灵活,以适应任何平台。软件可编程开放任务系统兼容设计还为下一代通信提供了一个集成环境,可以降低成本、风险和部署时间。
这次飞行测试是与空军签订的合同的一部分,旨在開发和演示一种解决方案,连接有利于联合部队的平台,并为他们提供跨空中、太空、陆地和海洋的实时战斗空间意识,以帮助定义空军的下一代无线电方法。使用诺斯罗普-格鲁门公司公司的软件开发工具包和开放式架构开发软件可编程开放任务系统兼容技术,将使空军能够快速引入新功能,以应对不断变化的威胁。
