基于可穿戴压力传感器的跌倒检测研究综述
2023-09-06郭天宏万蓬勃石玉娇
郭天宏 万蓬勃 石玉娇

关键词:可穿戴设备;压力传感器;跌倒检测
中图分类号:TP181 文献标志码:A
0 引言(Introduction)
第七次人口普查数据显示:2020年我国65岁及以上人口已经占到总人口的13.50%,人口老龄化问题日趋严重[1]。跌倒是老年人因伤害死亡的第一原因,有研究表明:2020年我国60岁以上老年人中,因跌倒而死亡的人数占到了因伤害死亡人数的39.34%[2]。跌倒检测是区分人体的日常生活活动(Activities of Daily Living, ADL)与跌倒事件并快速感知报警,以缩短跌倒者获救时间的一项技术,该技术在老年人日常监护中起到了重要作用且具有重要意义。
目前,比较常用的跌倒检测方法类型有可穿戴式、图像感知式和环境感知式等。可穿戴式的跌倒检测方法基于微机电系统(Micro Electro Mechanical System, MEMS),将传感器放置于衣服、鞋帽等服装或服饰品中获取人体数据并检测跌倒行为。此方法由于传感器的种类多、制造成本低,系统整体的数据计算量小,设置和操作简单,因此成为当前跌倒检测领域使用的主流方法[3-4]。
由于足底压力可以反映人体足部和下肢的运动变化,进而对人体运动状态和姿势做出判别,因此可将压力传感器放在足底测量压力数据,它具有侵入性小、便捷性高的特点,相比惯性传感器等类型的可穿戴传感器的优势更明显。本文对基于可穿戴压力传感器的跌倒检测研究进行综述,并详细对比和分析了相关研究成果。
1 足底压力与跌倒检测(Plantar pressure andfall detection)
1.1 足部构造与足底压力分布
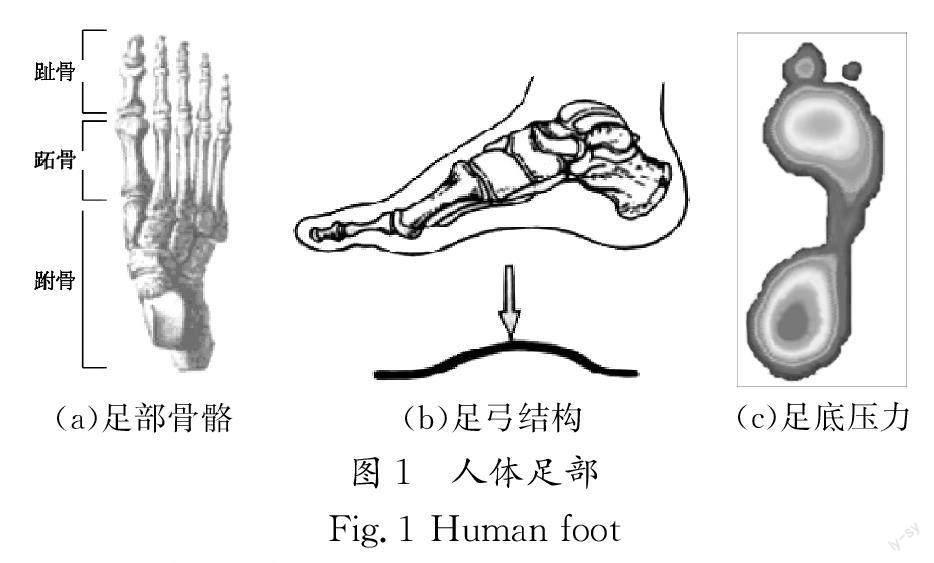
人体足部结构复杂,主要由骨骼、关节、肌肉、肌腱及韧带等部分组成,各个部分之间复杂密切的配合是人体完成行走等ADL的基础[5]。其中,足弓是由跗骨、跖骨、韧带和肌腱共同组成的一个凸向上方的弓形结构,该结构可以吸收足部受到的冲击力,分散人体重量,帮助身体完成站立、行走和跑步等动作。趾骨短小且灵活,起到了调节人体平衡的关键作用。人体足部骨骼与足弓结构如图1(a)和图1(b)所示。
足底压力是指足底受到地面的反作用力,根据特殊的足部生理结构,跖骨、跟骨以及大脚趾区域是足部与地面主要接触的区域,对这三个区域压力值的变化情况进行分析,即可得到人体运动状态[6-7]。图1(c)为JASENCO足底压力测量分析系统测得的静态足部压力图,从图1(c)中可以看出:足底压力主要分布在大脚趾、跖骨和后跟区域,与上文所述足部生理结构的分析结果一致[8]。
1.2 跌倒行为分析
跌倒是指“突发、不自主的、非故意的体位改变,倒在地上或更低的平面上”[9]。通常,跌倒的过程分为失重、撞击和静止三种状态(图2)[10-11]。以跌倒过程中腰部惯性数据和足底压力数据的变化为例,对失重、撞击和静止三种状态进行分析,图2中显示的加速度以一个重力加速度g为单位,压力数据则计算为足底压力与站立状态下最大压力的比值,以百分数形式给出。
(1)失重:人体在刚出现跌倒动作时,身体会逐渐倾斜并在重力的作用下向下坠落,双足逐渐与地面脱离接触,此时处于失重状态。在此过程中,竖直方向速度逐渐增大,加速度由重力加速度逐渐减小并趋于0,同时足底压力减小。
(2)撞击:在失重状态出现后,人体与地面瞬间发生碰撞,双足通常会产生小幅摆动。在此状态中,人体速度瞬间减小至0,加速度产生较大峰值并迅速恢复至重力加速度,足底压力值在0附近小幅摆动。
(3)静止:一般情况下,人体在撞击状态后的较短时间内会保持躺倒状态。在此状态下,人体保持一种相对静止的状态,加速度和足底压力均无较大变化。
从图2可以看出,基于惯性传感器的跌倒检测,通常以跌倒过程中产生的高加速度和角度变化等作为区分依据,可以区分跌倒的失重、撞击和静止三种状态;而基于可穿戴压力传感器的跌倒检测,对于以上跌倒的三种状态区分不是很明显,通常是根据跌倒前后足底压力的不同分布检测跌倒活动。
1.3 传感器种类和位置分析
在以往的可穿戴跌倒检测研究中,使用最多的传感器是惯性传感器(加速度计、陀螺仪、倾角仪等),通常放置在人体的躯干位置(腰部、背部等)。已有研究表明,在人体躯干位置设置惯性传感器缺乏对人体下肢运动的判别,容易误判一些类似跌倒的动作,如坐下、蹲下等[12-16]。目前,不少研究者将目光聚焦于通过在足底设置压力传感器检测跌倒活动,此方式主要有以下几个特点。
(1)除躺的动作外,人体大部分ADL均基于足部与地面的间接或直接接触,这类接触会产生足底压力,所以可以通过检测足底压力的变化判断人体双脚与地面的接触状态。针对跌倒动作,足底压力数据是短时间内从有到无的变化;针对走、跑和上下楼梯,足底压力数据是周期性的数值大小变化;针对站、坐、躺的不同姿势,压力数据是数值大小的明显变化。
(2)惯性传感器通常放置在腰带或者衣物上,这样放置较为显眼,老年人可能会有心理上的负担,同时需要自行佩戴,容易遗忘,也存在放置不稳定的问题[11,17-18]。鞋、鞋垫等制品是老年人日常出行所必需的,新型的薄膜压力传感器与其结合是一个较好的穿戴解决方案[19-21]。
(3)足部位置的特殊性导致足底压力对于上肢运动的感知不够,而对于足部和下肢的感知却很灵敏。一些下肢运动,如跷二郎腿、腿交叉、盘腿和抖动等动作出现频率大且模拟难度大的问题,对跌倒检测的算法设置和实际应用造成了一定的困难。
1.4 跌倒檢测系统框架
如图3所示,基于可穿戴设备的跌倒检测系统主要由数据采集、数据处理、跌倒检测模型、报警模块等部分组成[22]。
2 数据采集(Data acquisition)
基于可穿戴压力传感器的数据采集系统包括压力传感器、数据传输模块、主控芯片和电池模块等。人体足部具有一定的特殊性,因此压力传感器型号、数量和放置位置的选择是必须考虑的重点,同时基于可穿戴的要求,各模块的集成也需要重点考虑。本节从传感器的型号参数、数量、位置以及各模块的集成进行分析说明。
2.1 传感器类型和参数
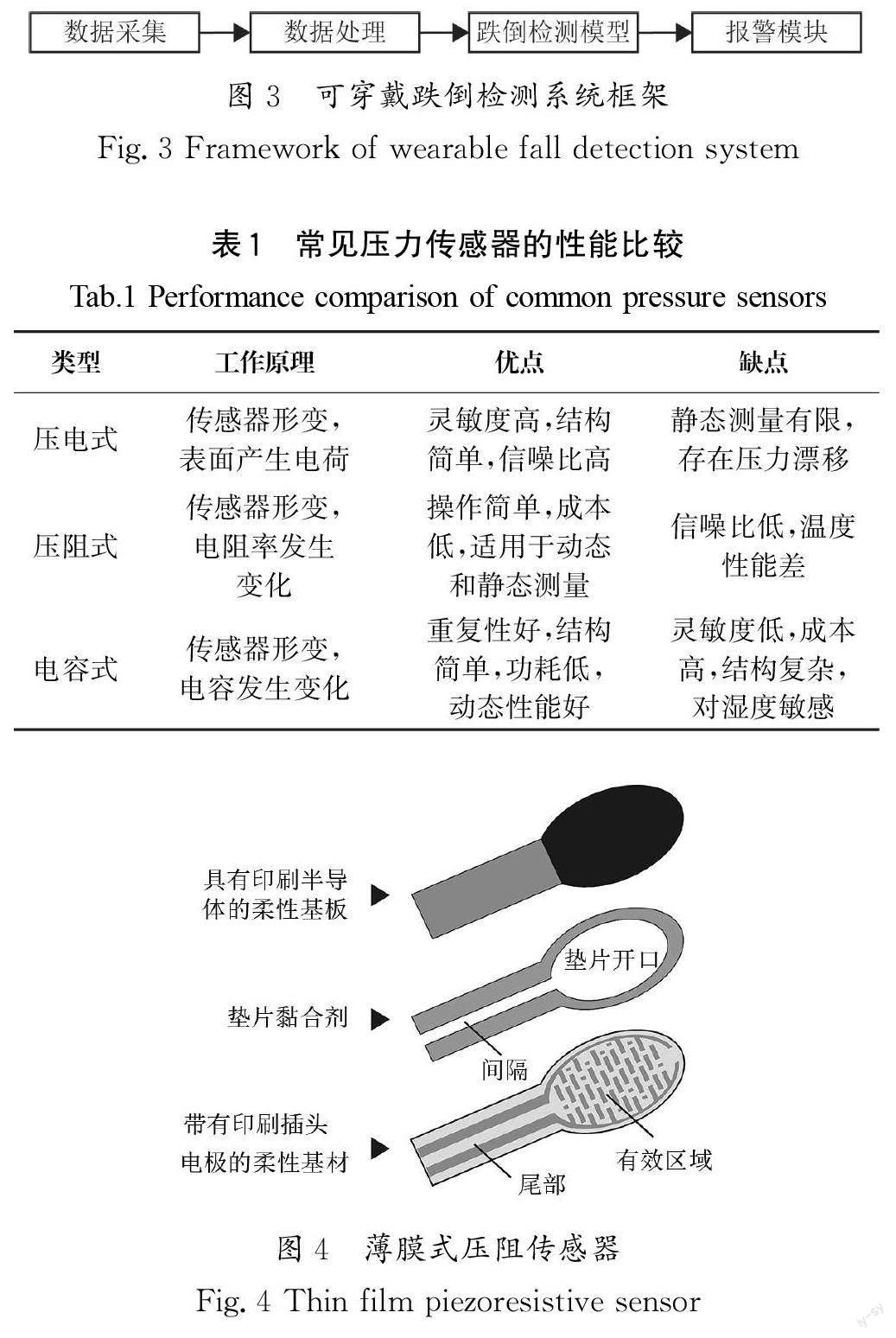
常见的压力传感器可根据工作原理划分为三种类型:压电式传感器、压阻式传感器和电容式传感器,其性能比较如表1所示[23-25]。
考虑足底压力的动态和静态转换频繁、鞋腔内部的温度和湿度变化差异、测量精度和成本等因素,基于可穿戴压力传感器的跌倒检测研究常使用壓阻式传感器,同时基于可穿戴的要求,Interlink Electronics公司生产的薄膜式力传感电阻器(Force Sensing Resistors, FSR)被很多研究者使用。FSR是一种聚合物厚膜(Polymer Thick Film, PTF)器件,其电阻随着施加到有源表面力的增加而减小,可用于电子设备的人体触摸控制(如图4所示)[26]。其中,FSR402和FSR400两款压力传感器最受研究者青睐,它们的区别在于尺寸和厚度不同,具体参数如表2所示[26]。
2.2 传感器数量和位置
王明鑫等[27]的研究表明:中国正常的成年人双侧足的足底压力分布以及不同性别的足底压力的分布无显著性意义。在跌倒检测研究中,研究者们根据不同的检测思路,采用了不同的放置方案(图5)。本文按照单足可放置传感器的数量(N),给出了三种压力传感器放置方案,即N >8:整足式;4≤N ≤8:关键点式;1≤N <4:简单式。
2.2.1 整足式
整足式放置的目的是尽量测量足底每个部位的压力大小,从而得到精准的压力分布,进而用于检测跌倒活动,因此需要的传感器数量多[图5(a)]。在文献[13]、文献[28]至文献[30]中,传感器以整足式的方式放置,传感器数量为11~512个。JIA等[28]使用自制的柔性压力传感鞋垫测量人体足底压力,鞋垫由512个电容测压单元组成,排列成32行16列。
整足式放置方案经常用于跌倒风险的预警,通过分析压力数据,可以获得较为精准的步态参数,进而评估人体的跌倒风险,指导跌倒预防。在以跌倒检测为目标的研究中,并不需要对整个足底的压力分布做细致的分析。未来,这样的设置方式可以为老年人提供跌倒预防和跌倒检测的综合解决方案。
2.2.2 关键点式
图5(b)是根据正常人的足部结构和足底压力分布选取的8个主要受力位置:分别为大脚趾、第一至第五跖骨、中足外侧和足跟位置[15]。其他的关键点式布局则以此8个位置为基础进行一定的更改[19,31-33]。其中,在图5(b)中的①②⑥和⑧这4个位置设置传感器是关键点式的简化方案,在现有研究中应用较多[32-34]。
选取关键点设置压力传感器,可以针对性地对大脚趾、跖骨和足跟部分的压力进行表征,同时需要使用的传感器数量较少,系统更加简单。
2.2.3 简单式
简单式设置方案一般有三种:①第一跖骨、第四五跖骨、后跟共三个位置[35-37];②前掌和后跟共两个位置[26,38-42];③只有一个位置,一般位于前掌部位[43]。
简单式放置方案是根据研究者的不同检测思路而设置的,这样做的优点是降低了系统的复杂度。相对于关键点式而言,简单式放置方案主要是针对足底前掌和后跟部位进行压力感知[图5(c)],这样做的优势在于可以简单地区分行走、跑步和上、下楼梯等动作,但是会缺少部分区域的信息,不能完整地对主要受力区域的压力状态进行感知。
从研究文献的数量来看,针对采用大脚趾、第一跖骨、第四五跖骨和后跟4个位置的关键点式设置以及前掌和后跟两个位置的简单式设置的研究居多。
2.3 数据采集系统集成
当压力传感器的型号、数量和位置确定好后,还需要配置其他硬件,包括电源模块、主控芯片模块、数据传输模块等,共同组成数据采集系统。本文将数据采集系统按从低到高的集成度分为组合式、简单集成和智能鞋垫三种形式,选取了三个文献研究中的数据采集系统进行说明(图6)[13,29,35]。在实际研究中,研究人员会根据不同的实验条件和研究思路对数据采集系统中各个硬件的结合方式进行不同程度的更改。
2.3.1 组合式
传感器与鞋子或者鞋垫通常以粘贴的方式结合,其他硬件在实验过程中需要绑在人体的小腿或者腰部位置。文献[34]和文献[36]中研究的采集系统为组合式,它的优点是系统简单、成本低、便于改进;缺点是体积大、便携度低,仅可用于实验研究。
2.3.2 简单集成
传感器通过塑封等方式集成为一块鞋垫形状的柔性材料,其他硬件则通过柔性材料与其连接并悬挂或粘贴在鞋子的表面。文献[42]至文献[44]中研究的采集系统为简单集成的方式,它的优点是传感器位置固定,便于实验室研究;缺点是集成度不足、舒适性不高。
2.3.3 智能鞋垫
传感器和其他硬件都集成在鞋垫上,外观与普通鞋垫的差异不大。文献[16]和文献[30]中研究的采集系统为智能鞋垫,它优点是集成度高,便携度高;缺点是成本高。
三种数据采集系统可以对应跌倒检测系统的不同研究阶段:研究的早期使用组合式,探究传感器的位置和数量设置;研究的中期则专注于将数据采集系统进行集成,逐步达到人体可穿戴的要求;研究的后期则在满足人体可穿戴要求的基础上,将数据采集系统与数据处理、跌倒检测模型、报警模块更好地组合与完善,逐步满足智能的要求。
从整体来看,与其他类型的传感器数据采集系统相比,基于可穿戴压力传感器的数据采集系统还需要考虑传感器的放置位置和数量,以及系统集成方法。目前研究中,传感器的放置方式以关键点式和简单式居多,系统的集成方法则根据实际研究条件而采取不同的方式。
3 数据处理(Data processing)
传感器采集到的原始压力数据通常无法直接使用,必须进行数据处理后才可输入算法模型进行跌倒动作判断。数据处理通常包括异常数据处理、缺失值处理、滤波处理、归一化处理、简单数据运算及特征值提取等。下文针对足底压力数据处理步骤中应用的特殊方法进行总结和分析。
3.1 数据转换
压力传感器采集到的数据是一个具体的值,不同体重的人在相同运动状态下的数据存在差异,对于跌倒动作的判断,特别是阈值的设置有一定的影响。为了排除此影响,BET等[17]和WANG等[18]将足底压力数据与站立状态下的压力值转换为比值,NIE等[20]则将足底压力数据转换为与零负载条件下的电压比。
3.2 分区计算
足部运动状态的获取需要一组传感器对足底不同部位的压力数据进行测量,在计算一些数据特征(如平均值、均值、方差等)时,有时需要分区进行计算。此处以平均压力的计算为例进行说明:①计算整个足底平均压力[41];②分区域计算平均压力[13];③ 按传感器阵列的排布计算,如按列计算平均压力[28]。
3.3COP与ZMP
压力中心(Center Of Pressure, COP)和零力矩点(theZero Moment Point, ZMP)的概念相似,当人体处于平衡状态时,ZMP与COP的数值无差异,在人体处于不平衡状态时,二者则显示出不同的特性。
LEE等[31]对智能鞋垫上的压力传感器位置做了标准化的处理,以百分数的形式表征足底压力横向COP与纵向COP,并使用决策树方法对跌倒进行判断。文献[28]和文献[45]均使用了零力矩点的方法判断跌倒动作。
3.4 基准压力
将不同姿势下的压力数据作为基准压力,在基准压力的上下进行姿势区分,将姿势区分引入算法中可以排除一些误报的情况,如坐下、蹲下等。徐攀峰等[46]用压力值的大小确定了站姿基准线和坐姿基准线,区分站姿、坐姿和躺姿三个姿势。
3.5 过零率
过零率(Zero Crossing Rate, ZCR)是指信号通过零点(从正变为负或从负变为正)的次数。将不同姿势下的基准压力作为“零点”,信号通过基准压力的次数,可以表征一定的运动状态。强家辉[14]、石欣[26]、徐攀峰等[46]将过零率作为跌倒检测的特征值。
3.6 步态分析
步态是人的自然行走方式,它是一个复杂的过程,涉及神经、肌肉和骨骼等多个部分,步态不仅可用于生物识别领域,也可以用于跌倒检测[7]。常见的步态参数有步频、步速、步长、步宽和步态时相等。
石欣[26]在足底前掌和后跟部位设置压力传感器,设置时间窗口和基准压力,计算压力数据与压力基准线的坐标并结合时间等数据提取步频特征、最大步频间隔双足特征等7个步态特征值,利用支持向量机(Support Vector Machine, SVM)的算法进行跌倒动作判断,平均识别率达到了90% 以上。MONTANINI等[35]在足底设置三个压力传感器,将人体活动时的最大压力值的1/3作为阈值,三个压力传感器的模拟信号可以转换为二进制信息,表征步态周期相位。
整体而言,因为足部位置的特殊性、足底压力与人体运动间的联系以及不同个体之间的差异,足底压力数据需要采用一些特殊的处理手段。其中,数据转换和分区计算是多数研究中会应用的一个数学思想,目的是减少个体差异的影响;强度矢量、COP和ZMP则是通过寻找足底压力各个区域数据的内在联系表征足部运动;而基准压力、过零率与步态分析通常共同使用,用于分析人体的步态和姿势。研究者们根据不同的研究思路采用了不同的处理方法。
4 跌倒检测模型(Fall detection algorithm model)
跌倒检测模型是跌倒检测中数据判断的最后一步,算法模型的构建思路与数据来源紧密相关,模型好坏的最直接体现是对跌倒动作的检测效果。以下对跌倒检测模型的数据来源、算法架构及检测准确率进行梳理,再对近几年的跌倒检测模型进行分析。
4.1 单独判断
石欣等人是国内较早研究单独使用压力传感器进行跌倒判断的研究团队,在文献[26]、文献[39]和文献[42]中,均使用双足足底前掌和后跟共4个部位的压力传感器采集人体足底压力数据,并使用SVM 进行跌倒检测,准确率为80% ~90.73%。强家辉[14]仅在单足下设置压力传感器,探究实现跌倒检测的可能性,并使用了SVM 算法,检测准确率达到了94.61%。
与惯性数据一样,单独使用足底压力数据不能对人体运动做全面且精准的表征,存在准确率低的情况。因此,目前的一些研究致力于多传感器的数据融合。
4.2 综合分析
从多传感器融合的角度对跌倒进行判断,主要有阈值和机器学习两种方法。
阈值方法计算简单,检测速度快,功耗小,但无法处理复杂的動作信息,研究者们多使用多级阈值的方法进行跌倒判断。合加速度判断人体动静状态,倾角判断人体相对于竖直站立时的夹角,足底压力判断双脚与地面的接触情况,由这三个阈值组成的多级阈值算法整体表现良好,准确率均达到94%以上[40-41]。徐攀峰等[46]基于足底压力数据,设置了过零点数、方差、平均值的三级阈值跌倒检测系统,但并未对该系统进行验证。
机器学习方法可以自动学习特征,准确率相对较高,但模型训练慢,模型性能对特征和参数的选择依赖度高,容易欠拟合[22]。对此,研究者们进行了不同的算法尝试。CHAN等[44]设计了一个包含压力传感器与惯性传感器的智能鞋系统,建立了卷积神经网络(Convolutional Neural Network, CNN)和循环神经网络(Recurrent Neural Network, RNN)的混合模型用于检测跌倒动作,F1分数(F1 Score)达到了99.8%。卢媛[38]将加速度信息、倾角信息和足底压力信息分别输入相关向量机(Relevance Vector Machine, RVM),根据分类结果和输出的概率信息建造基本概率分配(Basic Probability Assignment,BPA)函数,再通过DS证据理论(Dempster-Shafer EvidenceTheory)进行跌倒动作的判断,达到93.33%的检测准确率。JIA等[28]基于BP神经网络、隐马尔科夫模型和多元线性回归设计了两级跌倒预警,实验结果显示,该方法对于绊倒和滑倒动作的检测准确率都达到了98%以上。
在阈值算法中,压力、加速度、角度的三阈值算法使用者较多,表现出不低的准确率。机器学习方法中目前则没有较集中的算法应用,并且近年来不同的机器学习算法层出不穷,组合式的算法模型也不断被开发。
4.3 辅助验证
足底压力在一些研究者的研究中起到特殊的辅助验证作用,研究者们通常基于足底压力的数据特性对算法做前置判断或后置验证。前置判断通常是利用阈值过滤一些特定的动作。石欣等[39]仅使用足底压力数据,在SVM判断前增加了足底压力方差和平均值的阈值判断,结果显示,阈值判断可以明显降低误判的可能性,整体准确率在80%以上。靳少康[13]在采用随机森林(Random Forest, RF)算法前,做压力、加速度和时间的阈值判断,达到了98.3%的检测准确率。后置验证是对“一段时间内处于静止躺倒”这一状态进行判别。屠碧琪[15]提取了三个足底压力数据特征作为阈值判断标准,先根据加速度数据判断疑似跌倒动作,再用足底压力的三个特征阈值做最终判断,正确率达到99.55%。
辅助验证是跌倒判断中的重要一环,可以减少计算量和误报,特别是对躺倒这一状态做后置验证,能达到较好的效果。
4.4 近年出现的跌倒检测模型
将近年出现的跌倒检测模型连同传感器设置按时间顺序做了相应的梳理(表3)。
(1)单独使用压力传感器的算法性能较低,不同传感器数据的融合使用可以提高跌倒检测模型的性能。将文献[19]、文献[45]与其他研究对比可以发现,单独使用足底压力数据做跌倒判断,跌倒模型的整體准确率不高,普遍低于不同传感器的数据融合的算法性能。
(2)关于多传感器结合的位置设置,“双足+腰部”这样多点位的设置已经不常见[13,31,38]。目前主流的做法是在足部放置压力与惯性传感器[28-29,44]。将硬件系统集成在鞋子或者鞋垫中可以大大降低使用者的心理负担和提高系统的便携性。
(3)单独使用阈值方法的研究逐渐减少,阈值方法目前多起到算法的辅助作用[13,36-37],跌倒的判断更多的由机器学习方法实现。同时,研究者们对机器学习算法的选择不一,组合式的机器学习算法也不断被挖掘[28-29,44]。
(4)在多传感器结合的算法性能方面,各个研究的整体检测准确率均在93%以上。BP神经网络[33]、阈值与极端随机树(Extremely Randomized Trees, ET)的组合[13]获得了最高的检测准确率(99.7%),CNN[16]、RDAE-LSTM[29]、BP-HMM[28]的算法也达到了98.5%以上的准确率。
5 结论(Conclusion)
本文首先介绍了应用可穿戴压力传感器进行跌倒检测的内在原理和基本形式,其次基于跌倒检测模型框架和足底压力数据特点,对数据采集、数据处理和跌倒检测模型进行了分析和总结。研究表明,在足底大脚趾、第一跖骨、第四五跖骨和后跟4个位置以及前掌和后跟2个位置放置FSR402压力传感器获取双足的压力数据,更能满足跌倒检测对数据的要求;基于足部的特殊位置以及足部运动和人体状态间的联系,压力数据有数据转换、分区计算、强度矢量、COP、ZMP、基准压力、过零率和步态判断等特殊的处理方法;压力传感器与惯性传感器的融合,以及不同算法之间的融合是目前研究的主流方向。未来的研究重点在于系统高效集成、成本控制、功耗控制、数据的泛化性能以及算法的优化设计等。同时,基于智能鞋或智能鞋垫构建老年人的健康管理系统,提供更加全面的老龄化服务,是未来研究的一个主要方向。
作者简介:
郭天宏(1998-),男,硕士生。研究领域:鞋服数字化与智能化研究。
万蓬勃(1976-),男,硕士,副教授。研究领域:功能性服装服饰品技术研发,鞋服数字化与智能化研究。
石玉娇(1998-),女,硕士生。研究领域:鞋服数字化与智能化研究。
