网络RTK和PPK辅助水利工程免像控无人机倾斜摄影测量三维建模分析
2023-09-05张林杰饶维冬黎文辉
张林杰,黄 筱,饶维冬,罗 卫,左 强,熊 豪,黎文辉
(中国电建集团贵阳勘测设计研究院有限公司,贵州 贵阳 550081)
水利枢纽是优化水资源配置与时空分布的重要工程,在发电、防洪、灌溉、供水等方面发挥着巨大作用。然而多数水利枢纽都建在地形起伏较大的高山峡谷,因此在水利工程生命周期中需引入三维技术实现水利枢纽精细化和智能化的规划设计、施工管理及运营维护,同时对空间信息数据的需求也由传统的二维逐步过渡到三维。传统测绘产品(如 DOM、DLG、DRG等)仅能为水利工程提供抽象的平面位置信息,无法提供立体的三维信息;而基于无人机倾斜摄影测量的三维实景模型将信息的真实化、可视化、立体化、时序化融入水利工程,能够参与水利工程前期决策、规划设计、施工管理、运营维护等全生命周期的信息化管理。
无人机倾斜摄影测量三维实景建模,即由无人机搭载一个或多个数码相机摄影系统,获取多角度的地面影像,通过建模软件对影像POS(position and orientation system)与多视影像进行处理,最终完成三维实景模型的建立。基于无人机倾斜摄影测量的三维实景模型不仅能够满足1∶500高精度的三维测图[1-4],而且可辅助城市三维地理信息系统建设、三维城市规划及城市信息化建设[5-12];但针对水利工程的免像控无人机倾斜摄影测量三维建模的相关分析较少,且由于影像POS的精度有限,内业数据处理需要测区内分布均匀的像控点,这将大大增加水利工程的外业工作量,并延长产品生产周期。
综上,本文从满足成果精度的要求出发,兼顾项目成本和效率的原则,开展免像控无人机倾斜摄影测量三维建模研究,以某水利工程为研究对象,探讨基于网络RTK与PPK POS的免像控三维模型,以期为推进智慧水利建设提供参考。
1 无人机倾斜摄影测量与三维实景建模
1.1 无人机倾斜摄影测量
无人机倾斜摄影技术是由传统摄影测量衍生出的新兴技术,其本质是在无人机飞行平台上搭载多方向的数码相机,不仅能获取正下方的影像数据,即正射影像,还能同时获取与地表成一定角度(≥5°)的影像数据,即倾斜影像,从而使获取的信息更为完整[13]。搭载五镜头的无人机倾斜摄影如图1所示。
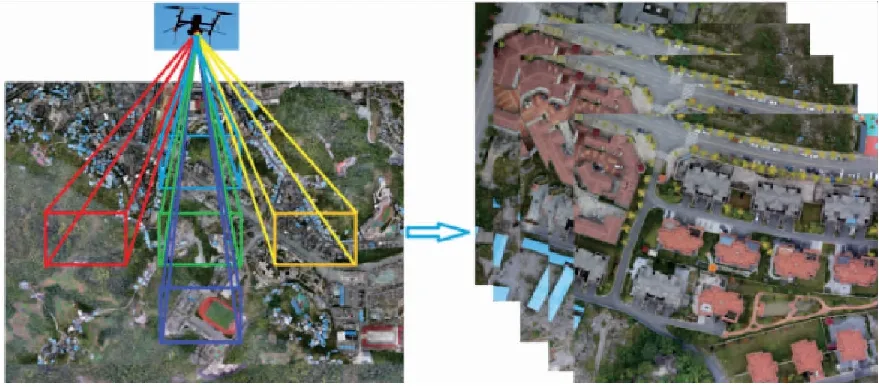
图1 五镜头倾斜摄影系统采集影像分布
无人机倾斜摄影系统主要包括地面站、飞行平台及载荷。其中,地面站主要保持与无人机通信,并实时获取无人机的飞行高度、速度及航线执行情况等,确保无人机飞行安全;飞行平台为固定翼、多旋翼或混合翼的无人机;载荷主要由多方向的数码相机与定位定向系统组成,定位定向系统用于提供曝光瞬间摄站在地面坐标系的坐标及影像的位置、姿态。
1.2 三维实景建模
传统的三维建模是利用AutoCAD、3ds Max等软件进行手工建模,不仅效率低,而且模型纹理不符合实际。随着计算机技术的不断发展,结合虚拟现实技术和三维可视化技术能够建立纹理信息更为丰富、更符合实际的三维实景模型。常见的实景建模软件有ContextCapture、PhotoScan、Smart3D、大疆智图、DP-Smart等[14]。
倾斜摄影测量三维实景建模基于传统航空摄影测量中的共线方程及POS辅助空中三角测量得到白模,再将影像的纹理映射到白模上,得到三维实景模型。POS辅助空中三角测量是将POS系统的原始数据进行严格的联合数据后处理,以测定相机准确的空间位置和姿态,然后将其与像点坐标观测值进行整体平差,从而直接确定地面目标点的三维空间坐标和6个影像外方位元素。图2为无人机倾斜摄影测量系统对地面摄影获得像点a的中心投影成像原理。
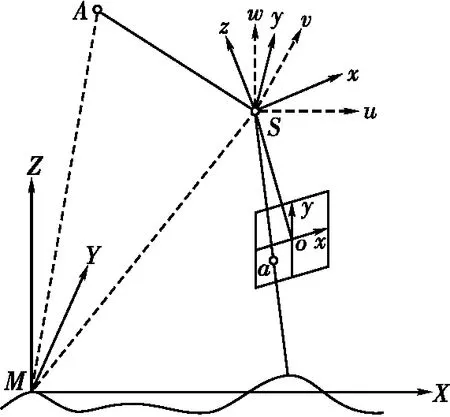
图2 倾斜摄影测量中心投影成像示意
设像点a在以像主点o为原点的像平面坐标系xoy中的坐标为(x,y),GNSS天线相位中心A在物方空间坐标系M-XYZ中的坐标为(XA,YA,ZA),则投影中心、像点、物点像平面坐标与物方空间坐标应满足如下共线方程[15]
(1)
式中,(x,y)为像点的像平面坐标;f为像片主距;(XA,YA,ZA)为物方点的物方空间坐标;(XS,YS,ZS)为摄站点S的物方空间坐标,即外方位元素;a1、a2、a3、b1、b2、b3、c1、c2、c3表示影像外方位角元素φ、ω、κ的方向余弦。
设机载GNSS天线相位中心A在相机本体坐标系I-μνω中的坐标为(μA,νA,ωA),则由影像姿态角φ、ω、κ所构成的正交变换矩阵R可得
(2)
当IMU测定的相机姿态角为φ′、ω′、κ′时,其与外方位角元素构成的关系式可表示为
(3)
式(1)—式(3)构成了影像定向参数与影像外方位元素间的严格几何关系,同时也是POS数据与倾斜摄影测量观测值联合平差的基础[16]。
POS辅助空中三角测量使用的观测数据包括像点坐标、机载GNSS确定的摄站坐标及机载IMU测定的姿态角,待估参数则包括视物点地面坐标、影像外方位元素及各类误差的改正数。基于此可构建误差方程,利用最小二乘平差方法即可求解物点的三维地面坐标和影像外方位元素的平差值[17],从而实现免像控建模。
2 仿地倾斜摄影数据采集与整理
2.1 倾斜摄影测量系统
以飞马D2000无人机为例,其集成的高精度GNSS板卡不仅能够同时接收北斗、GPS、GLONASS双频观测数据,而且基于GNSS精确授时机制和持续校准可实现亚毫秒级同步精度,有效确保了POS原始观测数据的质量。载荷选择D-OP3000五镜头倾斜摄影模块,一次拍摄能从获取的多角度地面影像上得到地面物体的精细信息。无人机及倾斜摄影模块相关参数见表1、表2。

表1 无人机相关参数

表2 倾斜摄影测量系统相关参数
由于此无人机具有精确仿地飞行功能,将其应用于水利枢纽起伏大的高山峡谷地形,能够获取地面分辨率一致的影像数据。仿地飞行是指在无人机作业过程中设定与已知三维地形的固定高度,使其与目标地物保持恒定高差,从而保证地面分辨率一致。借助仿地飞行,无人机能够适应不同地形,并根据测区地形自动生成变高航线,从而获取分辨率均匀的原始数据,实现更好的建模效果。
2.2 数据采集
水利枢纽工程现场地形高差大,因此数据采集选择仿地飞行的方式。进行航线规划时需导入测区的高程数据。但由于NASA SRTM 30 m高程数据精度较低,更新频率慢,且工程现场地面高差变化大,为获得高分辨率的影像数据,同时确保无人机安全,航线规划时采用预先飞行采集的测区数字地表模型(DSM)辅助航线设计,避免了由全球高程数据获取误差引起的无人机安全隐患。测区DSM如图3所示。

图3 测区DSM
根据预先飞行采集的测区DSM完成航线规划,设计的影像地面分辨率为3 cm,最终航线如图4所示。

图4 精确仿地航线
航线设计完成后选择晴朗、光线充足的天气进行数据采集工作,采集流程如图5所示。最终累计航飞3个架次,共采集7605张影像。

图5 数据采集流程
2.3 数据处理
2.3.1 POS解算
无人机能够提供基于网络载波相位的实时动态差分(NRTK) POS,但因NRTK易受网络延迟、流动站与参考站间的距离、共视卫星数等因素的影响,因此其数据处理软件支持后处理动态差分(PPK)重新解算POS。
利用PPK重新解算POS时,基于智理图模块,只需将流动站观测文件、基准站观测文件、广播星历文件导入即可进行解算。本文基准站观测文件是从其数据处理软件中下载的虚拟基准站观测文件,且因GLONASS在轨有效卫星数较少,解算时只选用GPS、BDS双系统进行PPK POS解算。
2.3.2 模型重建
建模软件选择瞰景Smart3D实景建模软件系统。该软件自动化程度高,数据处理流程简单,只需将影像、POS导入即可提交三维模型重建。为对比分析基于NRTK与PPK的POS建模精度,分别进行基于NRTK POS与PPK POS的两次模型重建。
倾斜摄影测量构建的三维模型相较于传统正射影像拥有更为详细的侧面纹理信息。建模完成后模型整体均色彩均匀、清晰。倾斜模型如图6、图7所示。

图6 基于NRTK POS的倾斜模型
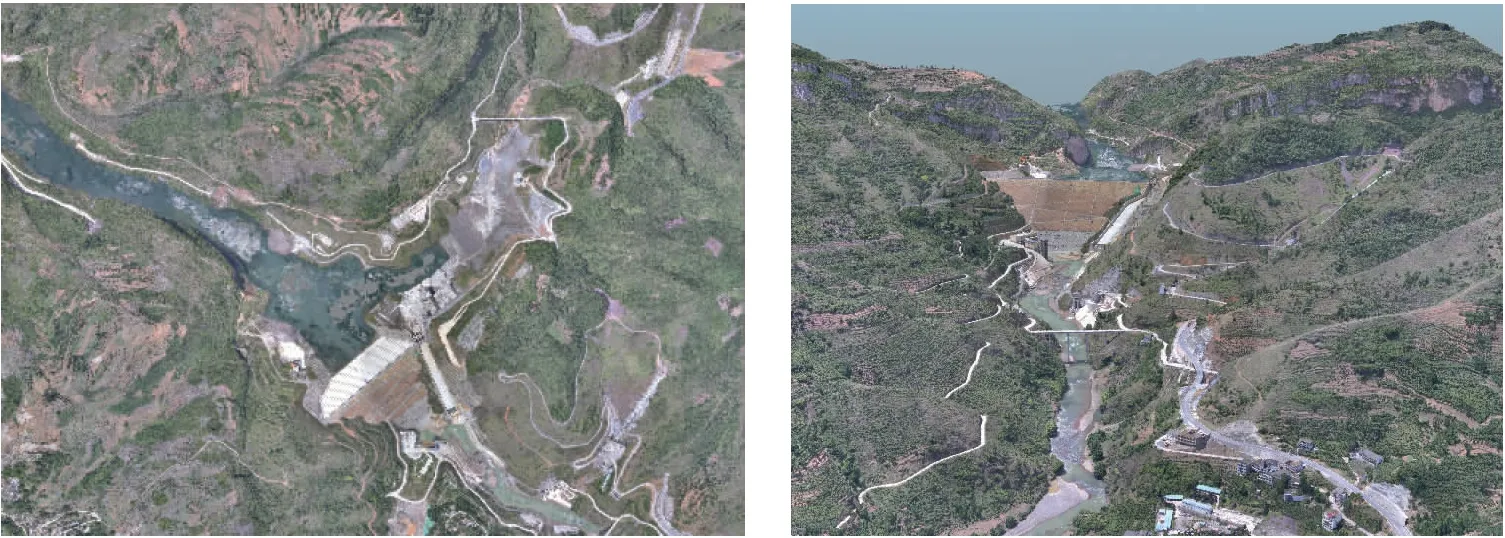
图7 基于PPK POS的倾斜模型
3 免像控三维实景模型分析
3.1 精度分析
为验证基于NRTK、PPK的影像POS应用于免像控倾斜摄影测量三维建模的精度,采集数据前在测区内均匀布设并采集40个特征检查点。检查点布设如图8所示。

图8 检查点布设
将检查点导入Smart3D软件已建好的模型中,并对比检查点的坐标与模型中的坐标,得到模型精度。平面误差与高程误差的计算公式为
(4)
式中,ΔP与ΔH分别表示平面误差与高程误差;(XM,YM,HM)表示三维模型中检查点的坐标;(XR,YR,HR)表示检查点的实际测量坐标。各特征检查点的误差见表3。
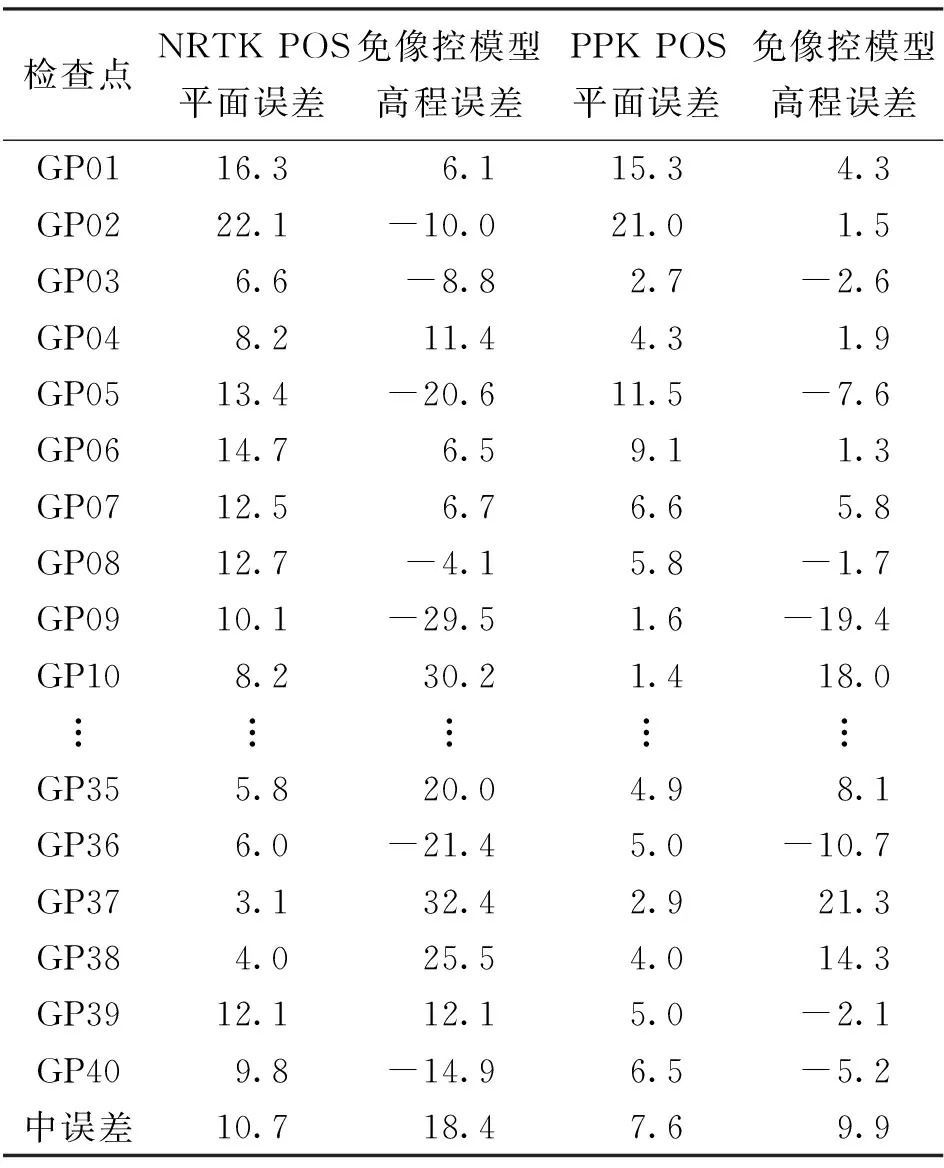
表3 基于NRTK PPK POS的模型精度 cm
由表2可知,基于NRTK与PPK POS的免像控倾斜摄影测量三维建模的三维模型平面位置中误差分别为10.7、7.6 cm;高程中误差分别为18.4、9.9 cm。根据《三维地理信息模型数据产品规范》(CH/T 9015—2012)中关于Ⅰ级1∶500成图比例尺三维模型产品规定的“平面中误差小于0.3 m,高程中误差小于0.5 m”的要求,基于NRTK与PPK POS的三维模型精度均满足要求,但基于PPK POS的三维模型精度优于基于NRTK POS的模型精度,尤其在高程方向。两者模型精度详细对比如图9所示。

图9 基于NRTK PPK POS的模型精度对比
由图9可知,模型的精度与初始POS精度相关,在一定程度上,高精度的影像POS可提升最终三维模型的精度。
3.2 纹理分析
纹理质量对于三维模型的应用同样至关重要。分析发现,本次免像控倾斜摄影测量三维建模模型细节的纹理质量较好,能够满足后期应用需求,如图10所示。

图10 模型纹理质量
4 结 语
本文通过两组对比试验验证了基于NRTK、PPK POS的无人机免像控倾斜摄影测量三维建模的模型精度,同时探讨了基于DSM的精确仿地飞行在数据采集、DSM生成、航线规划等不同阶段的主要操作流程。基于NRTK 、PPK POS的无人机免像控倾斜摄影测量三维建模的模型精度均满足《三维地理信息模型数据产品规范》中的相应要求。但对比检查点发现,基于PPK POS的三维模型精度优于基于NRTK POS的模型精度,尤其在高程方向。因此在免像控建模时,宜采用PPK解算的POS。
