无人机自动化贴近摄影测量建立单体建筑模型
2023-09-02凌龙陈文德龙家美廖浩天雷界
凌龙,陈文德,龙家美,廖浩天,雷界
(1.成都理工大学 旅游与城乡规划学院,成都 610059;2.成都理工大学 地球科学学院,成都 610059)
0 引言
元通古镇唯一新建的是位于三江汇流处的明清风格元通塔。登上塔顶可北迎泊江水,西眺味江澜,东观元通古镇,南赏成都平原,是元通古镇的标志性建筑。由于元通塔三面环水,所以对于该建筑的细化检测和养护管理工作受到诸多地形限制,人工测量难以找到适当的工作点,手动操作无人机拍摄也存在视觉盲区。目前倾斜摄影测量虽然在一定程度上解决了建筑建模效率低的问题,但也存在采集信息不完整、建筑物下方容易出现盲区和破损的问题,难以满足单体建筑精细化建模的要求[1]。何原荣等[2]提出联合三维激光扫描与倾斜摄影测量技术的古建筑建模方法,该方法相对于传统方法效率有大幅提升,但受地形影响明显,对环水建筑的建模较为困难。张祖勋院士[3]在2019年提出了贴近摄影测量的概念,被称为区别于传统垂直摄影测量和倾斜摄影测量的第三种摄影测量方式。作为一种新兴的测量技术,其在无人机技术的加持下对建筑物本体实现完整覆盖,能够达到厘米级甚至毫米级的数据采集工作,针对单体建筑在空间上相对独立,立面细节较为复杂的特点,可有效解决当前无人机建模角度受限的问题。李清泉等[4-5]提出了优视摄影测量的概念,通过分析场景的视点,计算出优化后的无人机数据采集航线,使无人机图像采集更具针对性和准确性,显著改善建筑物立面的模型效果,进一步提升大范围三维重建工作的精度和效率。苗志成等[6]利用贴近摄影测量对小体量单体建筑进行了精细化建模,但此办法需要较多人工参与,对于大体量建筑物存在建模效率低和安全性不足等问题,对无人机飞手要求较高,无法自动化完成贴近摄影测量。因此,针对建筑的测量和保护工作,亟需一种快速、自动化程度高、受地形限制少的方法。本文提出利用无人机倾斜摄影模型对贴近摄影测量进行精细化航线规划,可视化校验航线安全性并自动化执行数据采集的方法,具有高效率、低成本的特点,使外业脱离建筑物周围的地形限制,满足对单体建筑高精度、全方位数字化采集的要求。
1 技术路线
利用大疆精灵4RTK无人机(简称4RTK无人机)对元通塔周边范围进行倾斜摄影测量建模,生成用于精密规划航线的初步模型,此模型包含元通塔周边完整地形条件和障碍物信息,以该三维模型作为贴近摄影测量精细化航线规划的基础。利用航线规划软件,在倾斜摄影模型的基础上,规划均匀的贴近摄影测量航线并设置拍摄参数,并完成可视化安全性校验,使航线能够完整覆盖建筑物的立面和顶面,同时保证飞行安全,最后将该航线输入飞控执行任务,由RTK无人机进行全自动贴近摄影测量。
2 初步模型建立
利用GS RTK规划以元通塔为中心的150 m×150 m进行倾斜摄影测量“井”字型航线,航向重叠率设置为70%,旁向重叠率为60%,使用4RTK共拍摄76张照片[7]。该无人机搭载厘米级实时动态载波相位差分技术(real time kinematic,RTK),能显著提升数字成果精度,在免相控的条件下达到1∶500的标准规范[8]。将本次飞行的数据导入大疆智图软件中进行倾斜三维建模,输出WGS84坐标系下的研究区倾斜摄影模型如图1,图中的元通塔是本文此次贴近摄影测量的建筑主体。

图1 研究区倾斜摄影模型
3 贴近摄影测量
在无人机倾斜摄影模型成果中,立面模糊且纹理拉花严重,不能单独作为单体建筑监测和保护的数字化成果[9],但其能够详尽反映建筑物周围环境,具备坐标系和空间尺度。利用该模型进行贴近测量的航线规划可预先避开障碍物,调整航线以保证航线安全性,大幅提高无人机作业效率。贴近摄影测量主要包括航线规划、数据获取和数据处理等步骤[10]。
3.1 航线规划
自动化贴近摄影测量的核心在于航线规划,其决定了无人机贴近摄影测量作业时的安全性和成果精度,在航线规划分为参数测取、航线设计和安全性校验3个步骤[11]。航线规划选用某航线设计软件,其特有的自定义航线功能可以满足多种场景需求。
1)参数测取。无人机航线的具体路径取决于最近障碍物距离(D)、最低点高程(L)、最高点高程(H)、旁向重叠率(R)和航向重叠率(R′)等参数,利用大疆智图测量倾斜摄影模型中建筑物和周围环境的空间距离,测量结果如图2所示。其中:D为距离建筑物最近的障碍物直线距离18.89 m;L为航线最低点高程540 m;H为最高点高程,取建筑物最高处高程586.6 m;R为旁向重叠率;R′为航向重叠率。为保证建筑物建模质量,依据重叠度计算方法[12]做模型效果和重叠度关系的预测试,发现当重叠率低于50%时,部分建筑物悬挑结构细节丢失,而高于60%时,模型效果和纹理细节提升不大,用时却大幅增加。因此,本次采集中R和R′均取50%,所有数据考虑了冗余以保证飞行安全。

图2 倾斜摄影模型测距示意图
2)航线设计。在建筑物初步模型的基础上,对建筑物主体进行贴近摄影测量航线规划。航线包括立面航线、顶面航线和向上15°航线,共拍摄影像364张。其中立面航线主要拍摄建筑物的立面细节,顶面航线主要以向下45°的角度拍摄建筑物顶部细节,向上15°航线主要抬起云台相机拍摄建筑物檐下区域。
在无人机倾斜摄影成果中绘制建筑物顶视轮廓(A),在该轮廓形状向外扩10 m绘制航线作为无人机运行的平面轨道参考(A′),以A′为参考在立面方向由上至下设立7条环绕航线(B)。其中:1号航线作为顶面航线,云台角度向下45°对建筑物顶部拍摄;2~7号航线作为立面航线和向上15°航线,云台角度分别设置为0°和+15°,采集方向为绕建筑物主体向内采集,设置航向(R)和旁向重叠率(R′)均为50%。图3是航线规划的方法和步骤见示意图。无人机机型设置为4RTK,其传感器型号为DJI FC6310R,航线设计参数见表1,贴近摄影航线规划成果见图4。

表1 航线设计参数
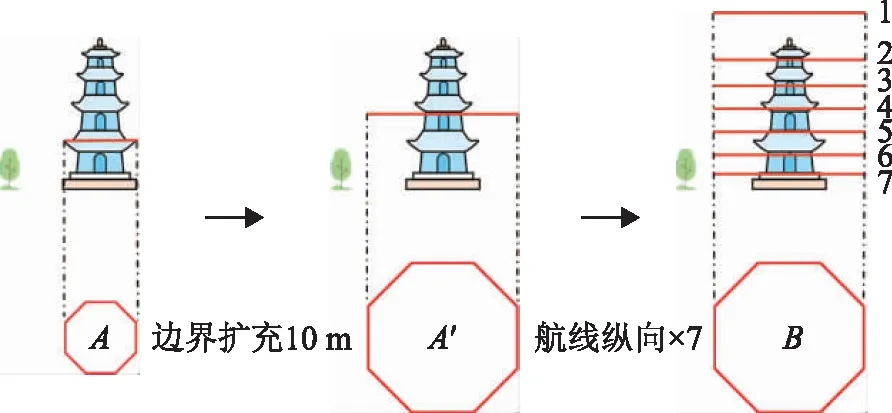
图3 航线规划的方法和步骤见示意图

图4 贴近摄影航线规划成果图
3)安全性校验。此次研究中,贴近建筑物飞行的过程中存在一定的安全隐患,靠目视观测发现无人机与障碍物即将碰撞时,通常来不及处理。因此需提前进行可靠的安全性校验。本方法中规划的航线和初步模型基于统一的坐标系,将航线和初步模型在GIS软件中进行叠加可视化分析,直观地展示航线穿过的区域,对后续贴近作业的安全性提供定量评估。如图5所示,无人机水平方向距离最近的障碍物为桥头的树木,其与规划航线的最近距离为7.95 m,与建筑物最近距离为10.94 m,具有厘米级定位系统的4RTK无人机在此距离下能够安全地从树木和建筑之间穿过。所有航线与障碍物之间均存在良好的安全冗余距离,无碰撞风险。

图5 航线叠加可视化航线安全性校验
3.2 贴近数据获取
对航线安全性进行充分校验后即可进行外业数据采集。将规划的航线和航点导入GS RTK飞控软件中,设置两次自动化任务,第一次飞行完成顶部航线和立面航线,第二次飞行完成向上15°航线,设置航点悬停拍照避免出现拉花,最后使用4RTK无人机执行自动化飞行。全程无需人工干预,无人机依据规划的航线对建筑物主体进行贴近采集作业。本次数据采集共耗时47 min、2块电池,共拍摄367张影像,该影像的EXIF数据记录了完整的拍摄位置和姿态信息(POS信息),便于后期进行精细化建模。
3.3 数据处理
对单个建筑的模拟更侧重于该建筑的小微部件的尺寸、结构和纹理信息[13],因此,数据处理环节的精度控制尤为重要。为了提升精细化模型的绝对精度和相对精度,需要进行数据预处理、相机标定、空三计算和模型生产4个步骤[14]。
1)数据预处理。数据预处理主要通过POS信息筛选和Lightroom批量化处理的方式。POS信息筛选的目的是排除掉定位数据明显偏差于规划航线之外的影像,这部分影像的位置信息偏移通常是由于障碍物遮挡或者网络RTK系统断流引起的,其参与空三计算会引起模型整体位置的偏移[15]。此外,过曝和欠曝的影像需经Lightroom进行批量化处理,使所有照片的曝光量尽量趋于一致,尽可能地反映出细部纹理,有助于空三计算中特征点的匹配。共筛选出3张位置偏移的影像,将其他合格的影像单独分组进入空三计算。
2)相机标定。贴近摄影测量的相机标定非常重要,传感器经过多影像平差计算标定后有助于提升整体数字成果的精度[16]。通过Context Capture Master中多幅影像的平差计算得到无人机的传感器校正结果,将平差结果输出为光学属性文件供后续步骤使用。
3)空三计算。空三计算是摄影测量中的关键步骤,其作用主要是确定影像位置。导入影像和相机的光学属性并提交空三计算任务,得到空三计算成果。光束法区域网平差是当前主流的空三计算方法。其以中心投影坐标的共线方程作为数学模型,以相邻照片作为控制参数,从而求得照片的外方位元素和加密点的地面坐标。
由于对于单体建筑的贴近摄影测量空三计算相对传统的倾斜摄影测量更为复杂,经测试多款空三计算软件都容易报错甚至掉片,难以满足精细化建模的基本需求。Agisoft Metashape具有强大的空三计算能力,将通过筛选和处理的364张影像导入该软件中进行空三计算,得到稀疏点云和相机位置误差。
执行航线飞行过程中的无人机相机位置的误差需要进行精度评估以确保无人机RTK系统正常工作。利用Agisoft Metashape进行精度分析,无人机定位精度分析图如图6所示,其中XY平面方向的中误差为1.50 cm,高程定位精度中误差为1.76 cm。其作业过程中定位精度达到厘米级,符合精细化建模的要求。
4)模型生产。导出Agisoft Metashape计算的空三结果,在Context Capture Master中进行点云构网和模型生产工作。建模过程具有自动化、高效率的特征,计算机通过读取影像的位姿信息,自动建立精细化三维模型。
4 成果分析
本次实验利用手持RTK对建筑的10个检查点进行测量,以评价模型成果在三维坐标系上的准确度。通过对比实际测量数据得到X、Y、Z3个方向的三维坐标值得残差值(Δ),得出平面和高程方向的中误差,如表2所示。
由表2中数据可知,模型成果的X方向中误差为±0.011 m,Y方向中误差为±0.008 m,Z方向的中误差为±0.004 m,水平中误差为±0.095 m,满足CH/T 9015—2012《三维地理信息模型数据产品规范》中Ⅰ级1∶500成图比例尺三维模型精度要求中的平面中误差小于0.3 m、高程中误差小于0.5 m的要求[17]。
对于建筑的监测保护和研究工作而言,模型的立面纹理细节和相对精度十分重要。此次外业选择激光测距尺和全站仪测量10处建筑部件的平面距离和高程,将该模型成果的测量值与外业实测值进行比较,得到平面距离差和高程差,以此进行精度的评价和验证。精度统计表如图7所示。

图7 相对误差统计图
由图7可知,平面距离差最大值为0.009 m,最小值为0.001 m;高程差最大值为0.008 m,最小值为0.002 m,精度均保持在毫米级别,精度较高。相较于传统的倾斜摄影测量,建筑立面的轮廓分明、纹理清晰,对于该建筑的特征部件,如窗户、屋檐、瓦片和裂纹等均可清晰分辨和测量,实现了对建筑物本体的高度还原。
选取塔顶、塔身和飞檐3个视角的细节,成果对比倾斜摄影模型的效果(图8),可见传统倾斜摄影只能获取建筑物大致外沿尺寸,而自动化贴近摄影的成果能够清晰反映建筑细部构件,建筑顶部瓦片数量清晰可见,飞檐翘角细节清晰,对于建筑物立面的纹理和建模工作有较大优势。模型成果能体现建筑物大于0.5 m的细节,对建筑物本体建模满足细节建模表现,根据CH/T 9015—2012《三维地理信息模型生产规范》中关于建筑物要素模型制作的相关规定,符合Ⅰ级建筑物要素模型制作的要求[17]。这样的航线规划方式还适用于其他相同类型的建筑物,尤其适用于多面临水、临崖等地形复杂的建筑物。

图8 两种测量方式效果对比图
5 结束语
当前倾斜摄影测量在建筑模型的细节表现方面不尽人意,而目前普遍采用的人工贴近摄影测量的方式对飞手技术有较高要求,容易引发无人机碰撞的安全事故,安全性和效率较低。为此,本文提出一种通过软件提前规划、自动化执行贴近摄影测量的方法,依托前期获取的倾斜摄影模型进行航线规划和安全性校验,提前规避风险,具备起飞后不管获取数据的能力,即使应对临水临崖建筑也能完成高精度重建作业。此方法改善了人工贴近摄影测量效率和安全性上的缺点,利用倾斜摄影模型规避建筑物周边的障碍物,适合单个建筑物快速获取精细化模型,其成果符合CH/T 9015—2012《三维地理信息模型生产规范》中Ⅰ级1∶500成图比例尺和Ⅰ级建筑物要素模型制作的规范要求。自动化贴近摄影测量以小型单镜头RTK无人机作为飞行平台,利于节约成本,增强作业小组机动性。该技术可用于补充大体量三维建模中的重点建筑的精细化重建工作,还可以用于建筑的破损检测和修复工作。
但该方法也有一定的局限性,比如:在大光比的天气下,建筑物的阳面和阴面色差和对比度过大,难免会在细节处理上出现问题;对于过大体积的建筑,RTK信号可能会被遮挡从而影响无人机定位精度;可见光相机对于纯色面积较大的建筑物建模可能会出现拉花或者空洞。因此,后续将对如何解决上述问题进行探讨,以及对大光比条件下的作业方式进行研究。
