基于算法模型的肥大型船艉流场评估方法
2023-09-02孙怡然陈伟民杜云龙
孙怡然, 陈伟民, 杜云龙
上海船舶运输科学研究所有限公司 航运技术与安全国家重点实验室, 上海 200135)
0 引 言
近年来,国际海事组织(International Maritime Organization,IMO)加快了实施绿色造船、限制新造船舶的温室气体排放的步伐。随着IMO对船舶节能减排的要求不断提高,世界各国纷纷加大了对绿色船舶的研发力度,促进船舶节能减排水平的不断提升。开展船舶水动力性能优化设计是实现船舶节能降耗的重要技术手段之一,通过对船型、推进器和船尾节能附体进行优化设计,减小船舶航行阻力,提高船舶的推进效率,从而实现船舶性能提升,达到节能减排的目的。在对船舶进行优化设计过程中,往往需结合螺旋桨附近的流场特征,针对性地进行螺旋桨和船尾线型设计,尤其是对于肥大型船而言,其艉部流场特征对船型阻力和船舶的推进性能有显著影响。因此,需在设计船型过程中获取艉部流场特征数据,为船型和推进器的优化设计提供参考。但是,在开展船型设计时通常需对大量设计方案进行迭代,在对艉流场进行提取和量化分析时往往需重复进行计算流体力学(Computational Fluid Dynamics,CFD)计算和流场数据处理,计算量和人工处理工作量较大。近年来,研究人员开展了很多基于CFD计算的艉流场研究和基于人工智能算法的船舶水动力性能预测研究。苗飞等[1]采用黏流CFD数值模拟方法对一艘加装节能装置的散货船进行了研究,根据艉流场的切向流速和预旋艉流分析了节能装置的节能效果。吴铁成等[2]采用基于有限体积法的数值计算方法,结合试验数据,对艉流场的三维空间分布进行了重构,以便更好地理解艉流场结构。陈卓等[3]对轻载和重载工况下的艉流场进行了分析,结果发现轻载和高进速系数能使艉流稳定。SU等[4]对大型船模的艉流场进行了计算,通过分析桨后湍动能、艉部流线、表面压力和螺旋桨桨叶表面压力等参数,对节能装置的节能效果进行了预测。NAJAFI等[5]计算分析了双螺旋桨船舶的艉流场分布特征。WANG等[6]采用CFD软件对螺旋桨艉流进行了研究。冯榆坤[7]基于支持向量机搭建代理模型,采用序列最小最优化算法对船舶的总阻力和伴流场进行了优化。YANG等[8]通过采用物理信息神经网络(Physical Information Neural Network,PINN)求解不可压缩流体的N-S(Navier-Stokes)方程,对流场进行了预测,根据流场中流体的速度和流动方向建立了用于训练PINN的数据集。DING等[9]提出了一种用于进行艉流检测的轻量级深度学习网络,实现了对艉流的分类和定位,其中艉流检测的平均精度达到了97.29%。综合已有研究可知,在以往基于人工智能算法的艉流场预测和优化研究中,没有应用具体参数对艉流场进行标准化评估。因此,结合CFD技术与人工智能算法模型,采用艉流场均匀度和轴向伴流平均值作为标准评估艉流场,能最大程度地节约时间和计算成本,准确预测艉流场,了解其速度分布和均匀度等,为节能装置的结构设计提供指导,促进螺旋桨推进效率的提升,同时使型线优化更便捷。
为此,本文主要对采用数值计算与粒子图像测速(Particle Image Velocimetry, PIV)技术试验2种方法所得船模艉流场的流速大小和等值线形状等进行对比,验证数值模拟方法的有效性。同时,研究艉流场的特征,分析不同艉流场评估方法的特点,确定艉流场评估参数,采用3种人工智能算法进行艉流场计算,采用非线性回归拟合方法进行参数计算和评估,选择误差最小的算法构建艉流场评估模型,完成对肥大型船艉流场的评估。
1 研究对象
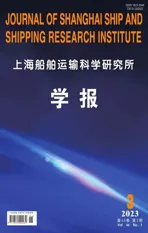
本文选取的研究对象为某23万吨级散货船,船体模型为未安装螺旋桨的裸船体,缩尺比为1∶60。采用流体计算软件STAR-CCM+建立数值模型,其主尺度参数见表1,船舶几何模型见图1。
表1 23万吨级散货船模型主尺度参数

图1 23万吨级散货船几何模型
2 研究方法
2.1 数值计算方法
2.1.1 基本方程
本文采用RANS(Reynolds-Averaged Navier-Stokes)方程作为控制方程进行数值计算,包括连续性方程和动量方程,其表达式分别为
∇·U=0
(1)
(2)
式(1)和式(2)中:U为速度场;Ug为网格节点速度;pd为动压力;ρ为流体密度;g为重力加速度;μ为动力黏度;fσ为表面张力;∇为梯度算子。
在数值模拟过程中选择k-ωSST湍流模型封闭N-S方程。采用带有人工压缩技术的VOF(Volume Of Fluid)法捕捉自由液面。
2.1.2 计算域
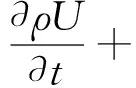
建立计算外域,其尺寸选取原则:流向长度为5倍船长;侧向长度为2倍船长;法向长度为3倍船长。采用叠模方法创建计算域,对计算外域和船体进行布尔运算,设置计算域边界类型:船后边界为压力出口;中纵剖面为对称面;其余4个面为速度入口;船体和舵面为不可滑移壁面边界条件;其他面为可滑移壁面边界条件;将各边界速度、体积分数等参数初始化。计算域示意图见图2。
图2 计算域示意图
2.1.3 网格划分
在划分网格之前对流动剧烈的区域进行加密处理,采用表面修复的方法,利用切割体网格和棱柱层网格对计算域进行网格划分,计算域内的网格总数约为200万个,完善基础属性之后,该船舶计算域网格划分情况见图3。
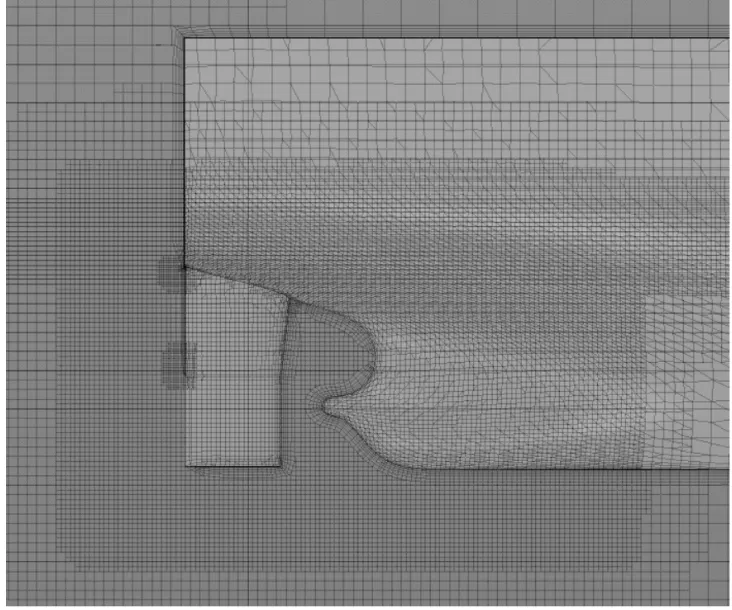
a) 艉部网格加密
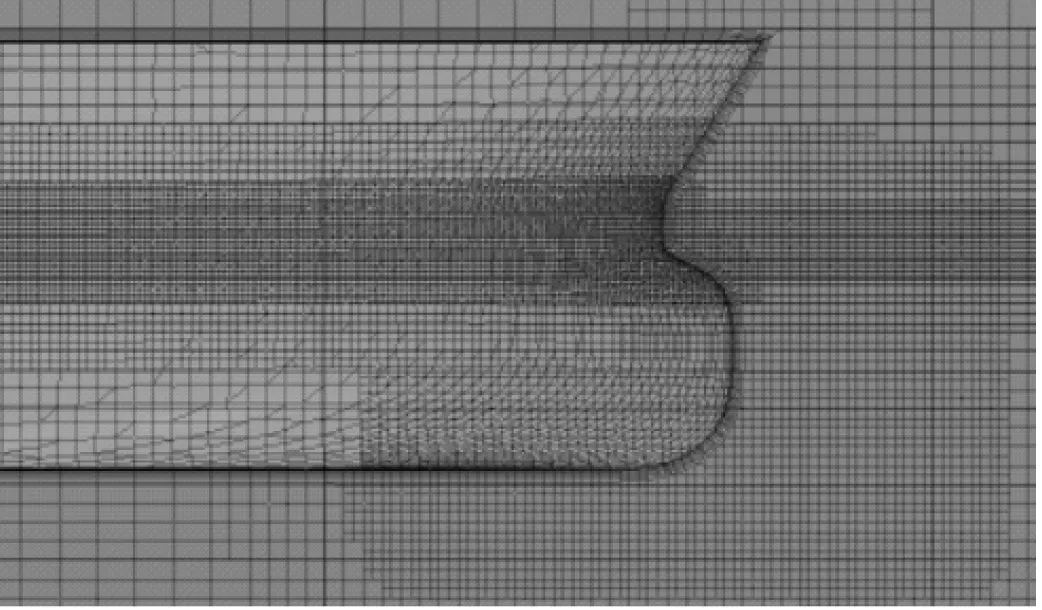
b) 艏部网格加密
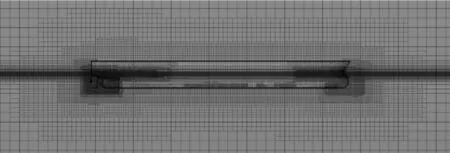
c) 船体网格加密图3 船舶计算域网格划分情况
2.2 艉流场特征参数分析方法
为更精确地描述艉流场,以便为螺旋桨和节能装置设计提供便利,各国的船舶协会和水池试验机构等在试验的基础上提出了很多判定艉流场的标准,其中包括英国船舶研究协会(British Ship Research Association, BSRA)提出的BSRA五项衡准[10]、汉堡水池提出的轴向艉流质量因子[11]和荷兰水池提出的伴流目标函数(Wake Object Function, WOF)[12]等。BSRA五项衡准提出时间较早,计算过程比较繁琐,对于肥大型散货船而言,采用该衡准计算所得结果不够准确。
结合各种衡准方法和CFD数值计算方法,采用WOF描述艉流场的不均匀度,其数值越小,说明艉流场越均匀;采用桨盘面内的平均轴向伴流分数和0.7R(R为螺旋桨半径)处平均轴向伴流分数描述伴流场特征。将这3个参数作为肥大型船艉流场快速评估方法的输出值。平均伴流分数Vmean和伴流均匀度WOF的计算公式分别为

(3)
(4)
式(3)和式(4)中:rh为桨毂半径;vaxial为无量纲轴向速度;φ为0°~350°范围内间隔10°的取值。
2.3 艉流场代理模型训练方法
2.3.1 样本生成
肥大型船的特点是平行中体在船体中占比很大,在进行船型优化时,艏部和艉部的变化空间较大。与艏部相比,艉部距艉流场较近,对艉流的速度和方向有很大影响,当船型发生变化时,选取艉部特定点作为可变点。根据型线图,参考艉部特征,船体对艉流场的影响主要体现在螺旋桨和桨轴部分,选取桨轴处水线(距离船底5.00 m处水线)与1站、2站、3站和4站型线交点,采用半宽值对交点横坐标y值作无量纲化处理;选取稍高于螺旋桨的水线(距离船底10.76 m处水线)与1站、2站、3站和4站截面面积,采用距离船底10.76 m处水浅以下各站横剖面面积对其作无量纲化处理。将以上8个艉部线型特征参数和艉部菱形系数作为输入参数。
在确定模型训练所需的输入参数之后,采用半参数化船型变化方法和二次多项式计算艉部特征点的移动量。为提升模型训练的准确性和普遍性,选取500艘艉部型线不同的肥大型散货船的数据集作为模型训练原始数据集。
2.3.2 训练方法
算法模型主要分为线性回归模型和非线性回归模型2种。线性回归模型采用线性模型解决简单问题;当输入变量和输出变量有多个,且相互之间的关系比较复杂时,非线性回归模型能更好地预测数据之间的映射关系。本文采用3种非线性回归算法进行拟合,分别是GBDT(Gradient Boosting Decision Tree)算法、Adaboost算法和多项式算法。
1) GBDT算法是将CART(Classification And Regression Tree)回归树作为决策树,将梯度提升作为学习方式,通过学习前一次拟合结果的残差逐渐提升预测精度的串行集成学习算法,能有效减小预测误差。
2) Adaboost算法是基于多个回归模型得到的Boosting集成学习方法,是根据样本误差和学习器误差更新下一个学习器的权重的串行集成学习算法。依次构造多个弱学习器,根据每个弱学习器中的加权误差得到该学习器在模型集成时的权重,并根据前一个学习器中每个样本的误差更新下一个学习器的样本权重。
3) 多项式算法根据历史数据拟合出多项式回归方程,并利用多项式回归方程对新的数据进行预测,实质上就是求解出每个特征自变量的权值θ。首先构建一个凸函数的优化函数,采用最小二乘法和梯度下降法计算最终的拟合参数。回归方程为
hθ(x)=θ0x0+θ1x1+θ2x2+θ3x3…+θnxn=X·θ
(5)
3 艉流场数值计算结果与试验结果对比
3.1 艉流场模型试验
本文采用PIV技术进行艉流场试验,将试验结果与数值计算结果相对比,验证数值计算方法的有效性。在船模水池实验室对23万吨级肥大型散货船模型进行PIV艉流场试验,水池长108 m,宽7 m,深5 m。船模拖车由电力驱动,车速为0.1~6.5 m/s,稳速精度为0.1%。标定PIV测量系统,使图片中的像素点信息与实际长度信息相对应,见图4。

图4 测量区域标定场景
3.2 数值计算结果与模型试验结果对比
通过PIV试验得到船模在设计工况、裸船体状态下的螺旋桨盘面处和桨毂帽末端截面处流场流速图。同时,通过数值计算软件STAR-CCM+计算得到艉流场,用自由面截取PIV试验所测位置的流场速度图,其中艉流场的空间分布用轴向流速u与航速U的比值表示。由于在艉流场3个方向的速度中,轴向速度对螺旋桨和节能装置设计的影响远大于周向速度和径向速度,本文主要对轴向速度进行研究。将通过PIV试验与数值计算所得艉流场轴向流速相对比,结果见图5。

a) 桨盘面处PIV试验流场
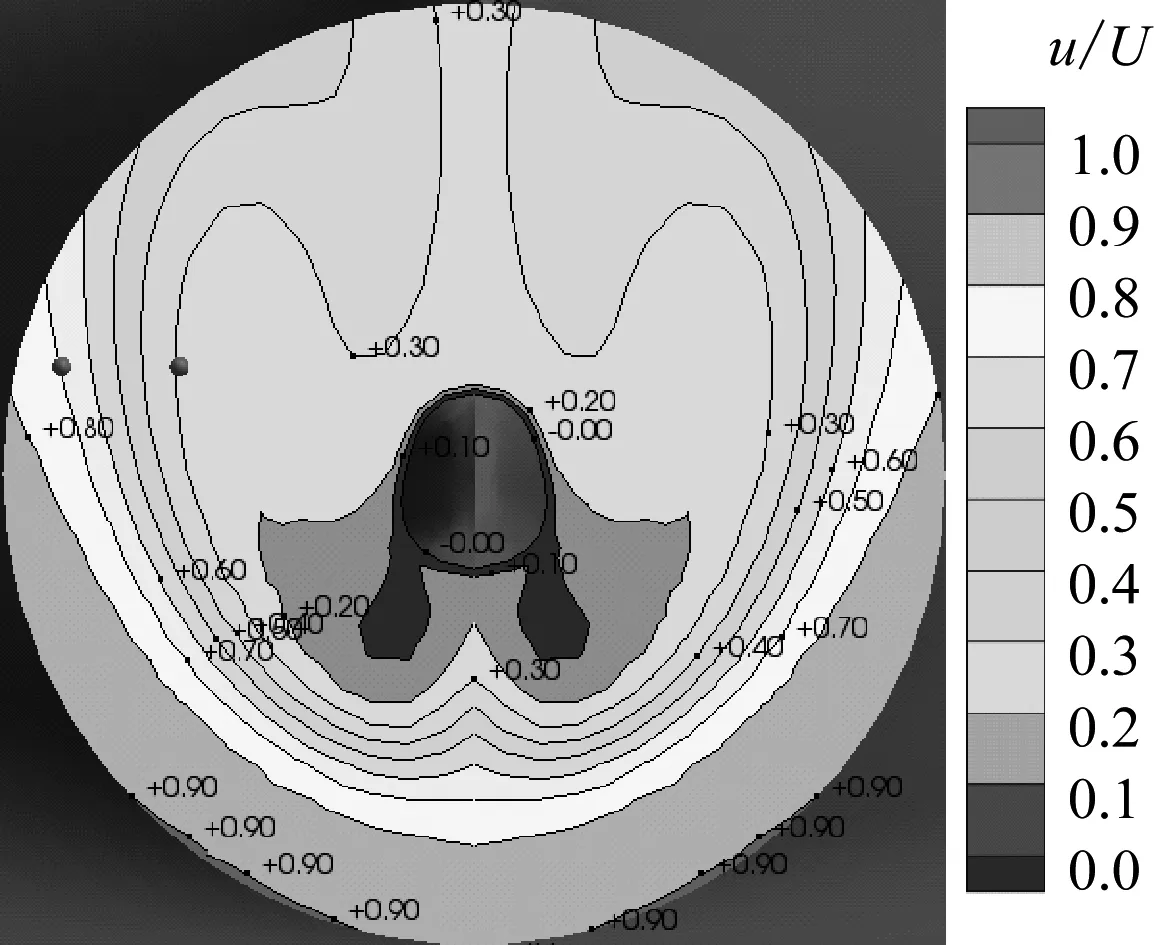
b) 桨盘面处数值计算流场
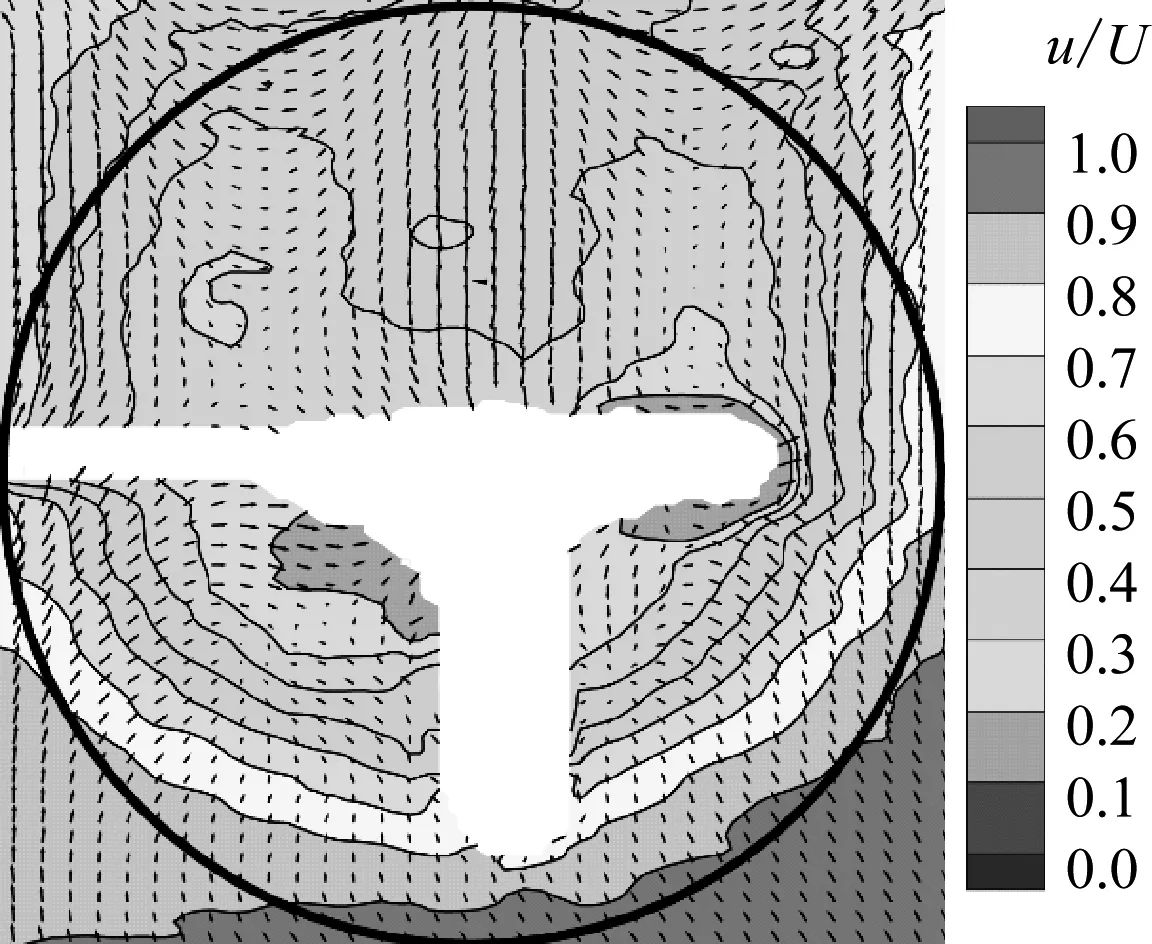
c) 桨毂帽末端PIV试验流场
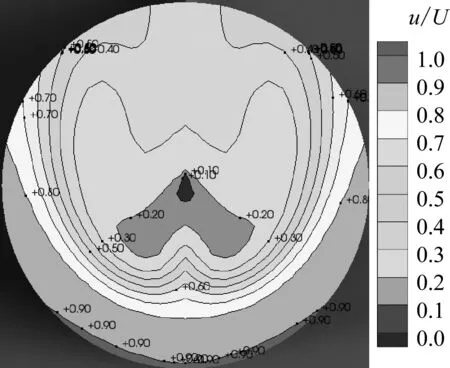
d) 桨毂帽末端数值计算流场图5 通过PIV试验与数值计算所得艉流场轴向流速对比
由图5可知,艉流场在不同轴向流速等值面处的PIV试验图像与数值计算图像的位置和形状大致相同。因此,数值计算结果与PIV试验结果较为接近,本文所述数值计算方法可作为艉流场预测的有效方法。
4 艉流场快速预报模型
4.1 模型训练
将上述500艘船模的艉部参数代入艉流场计算模型中得到500组数据,随机生成480组训练集数据和20组测试集数据。采用训练集数据对GBDT算法、Adaboost算法和多项式算法等3种算法进行训练。在评估算法的有效性时,通过相关系数R2进行相关性分析,R2的值越接近1,吻合度越高;采用剩余标准差(Root Mean Squared Error,RMSE)和平均绝对误差(Mean Absolute Error,MAE)检验算法模型的有效性。采用3种算法得到的R2、RMSE和MAE对比见表2。
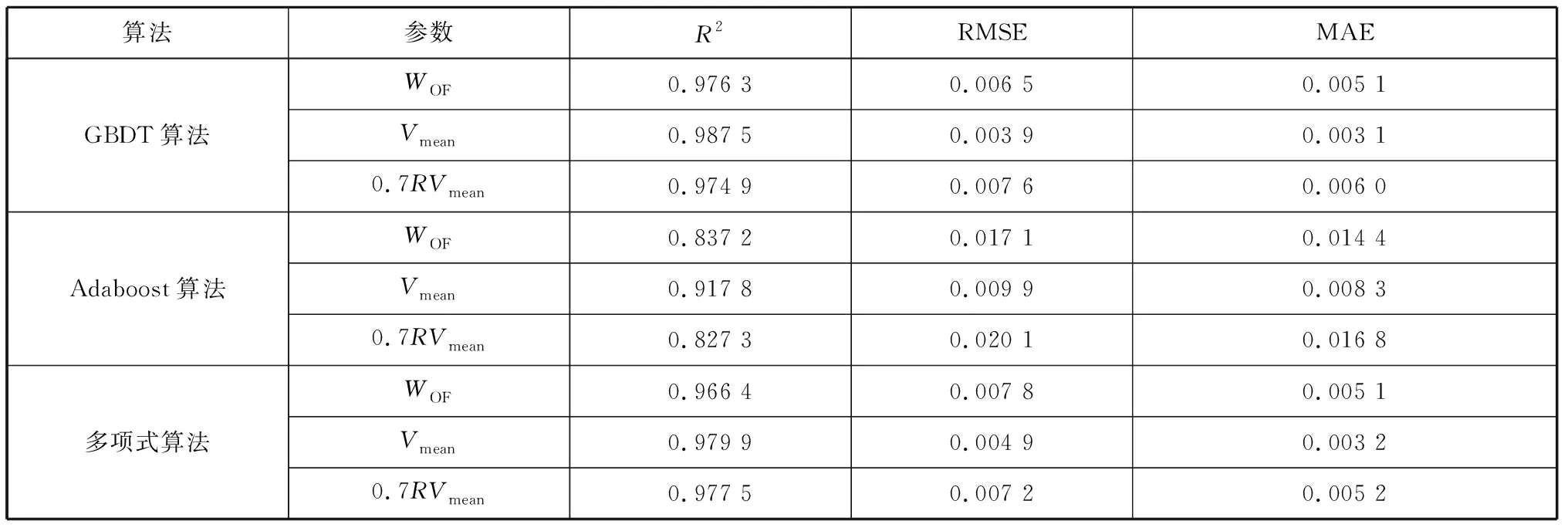
表2 采用3种算法得到的R2、RMSE和MAE对比
由表2可知,相比Adaboost算法和多项式算法,GBDT算法的相关系数较大,误差较小,因此采用GBDT算法搭建艉流场评估模型。图6为GBDT算法的参数拟合效果图。
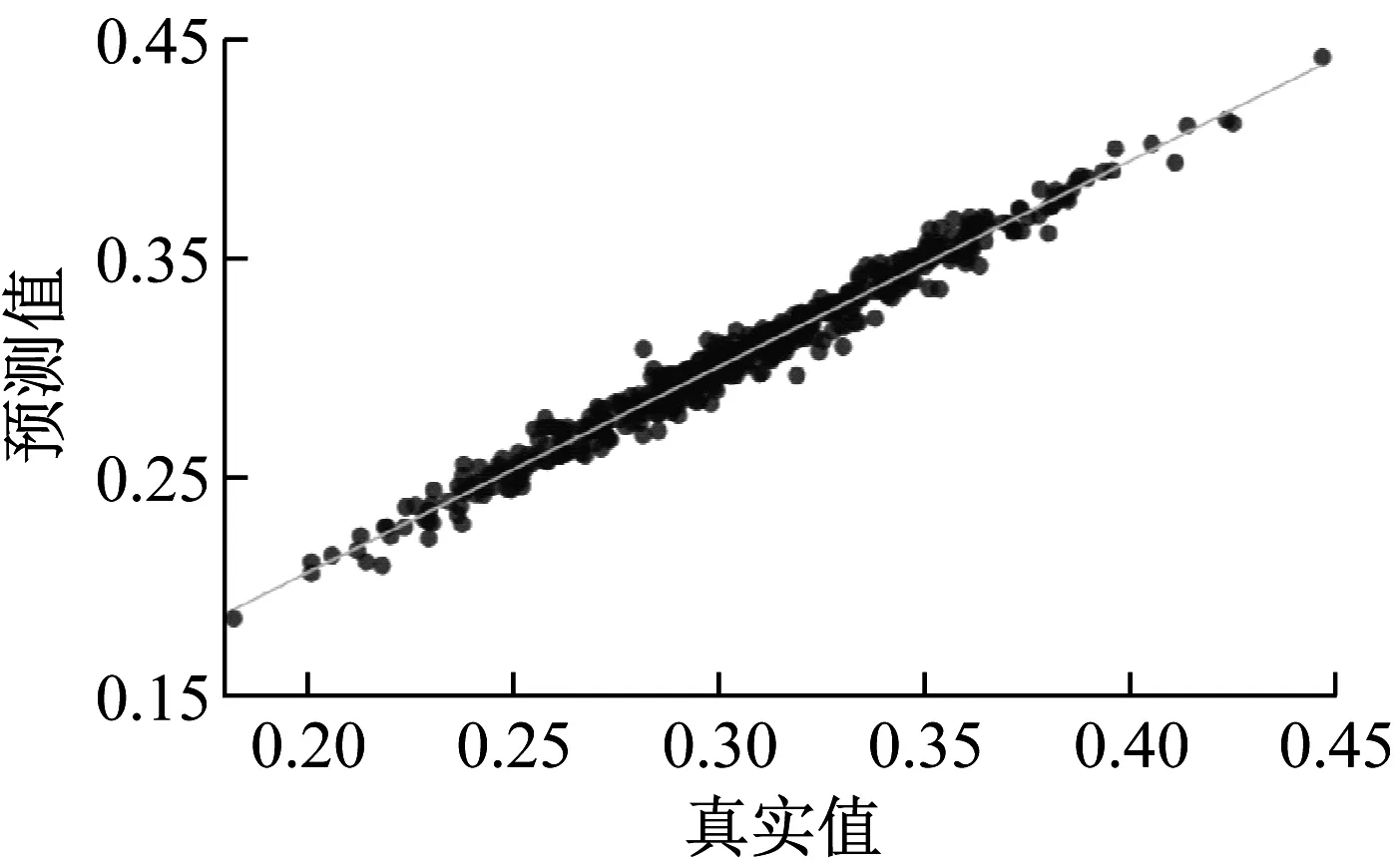
a) WOF拟合情况
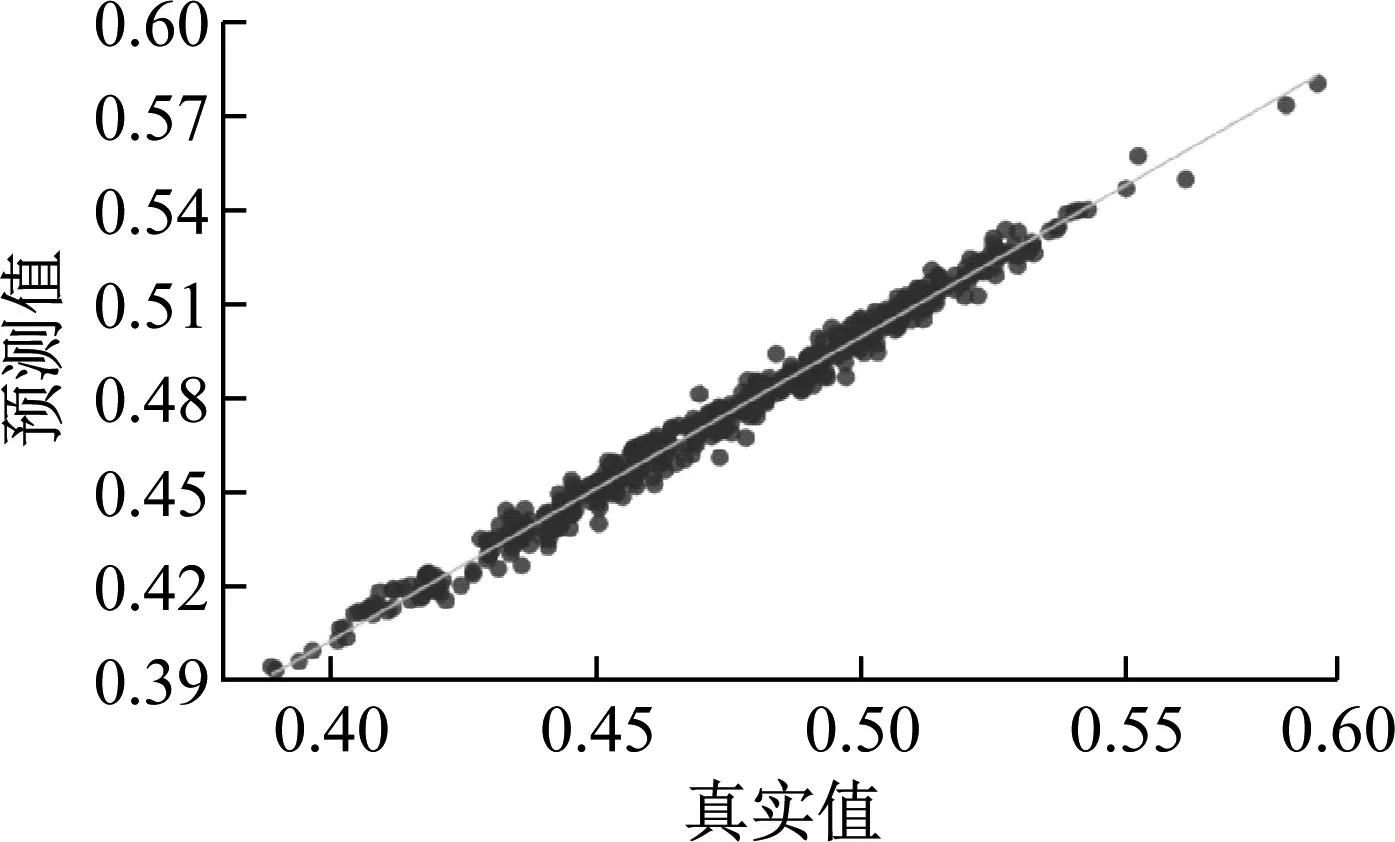
b) Vmean拟合情况
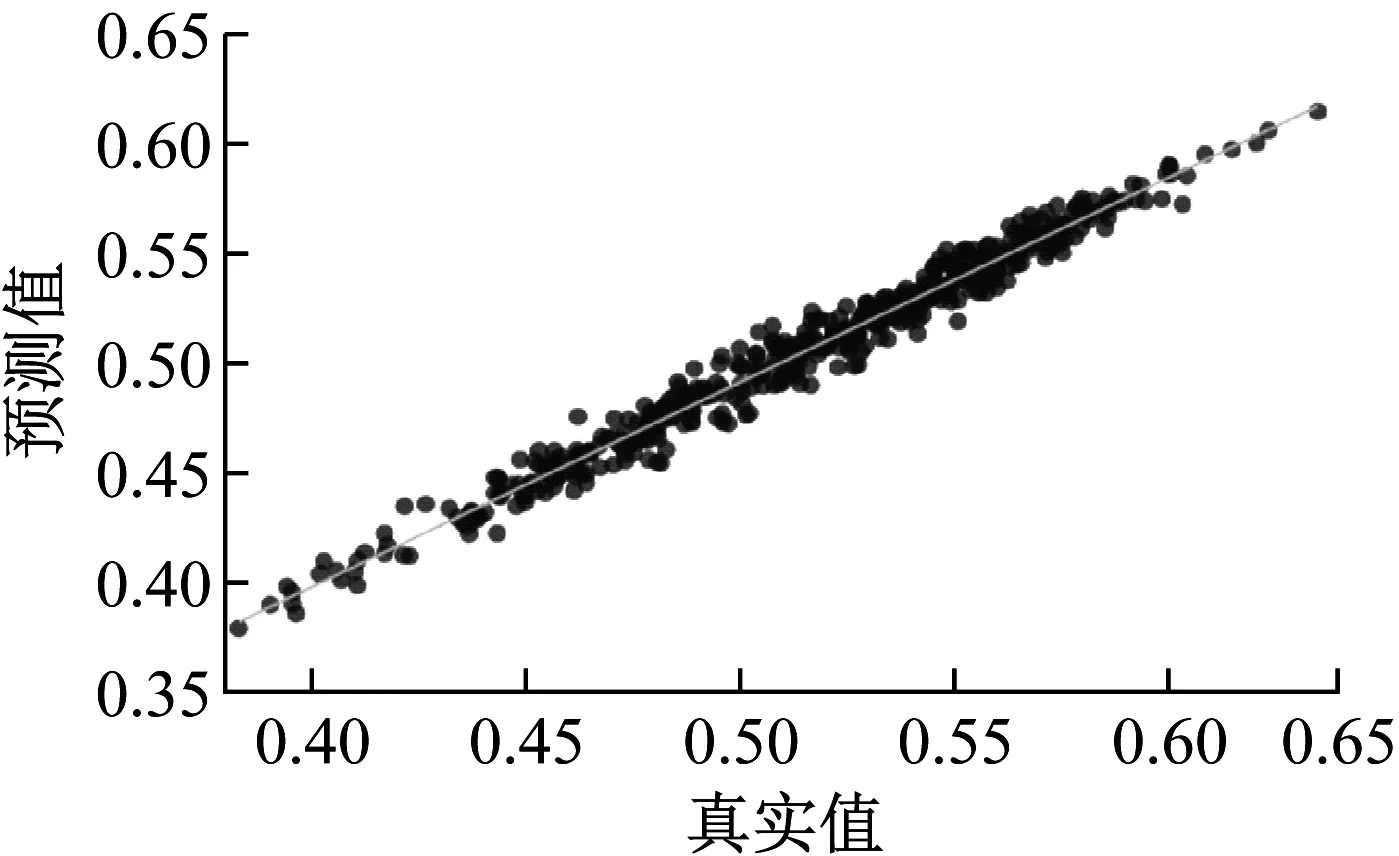
c) 0.7RVmean拟合情况图6 GBDT算法的参数拟合效果图
4.2 代理模型验证
采用训练得到的GBDT算法模型计算20组测试集数据,所得WOF、Vmean和0.7RVmean的预测值与真实值对比见图7。
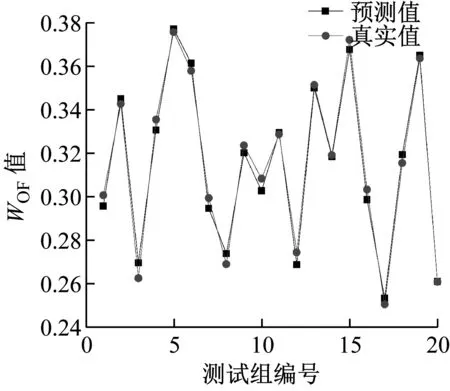
a) WOF值对比
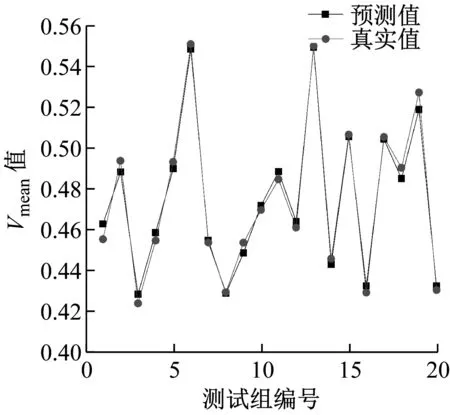
b) Vmean值对比
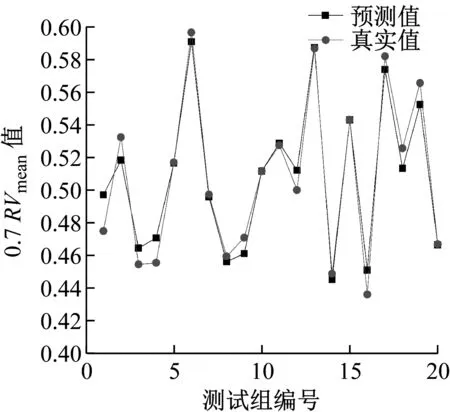
c) 0.7RVmean值对比图7 采用GBDT算法得到的WOF、Vmean和0.7RVmean的预测值与真实值对比
在采用GBDT算法计算所得艉流场参数中,误差最小为0.01%,大部分都在2.00%以内,平均误差为1.15%,算法模型的表现良好,表明采用GBDT算法所得数据具有较高的准确度。
5 结 语
本文以某23万吨级散货船为研究对象开展艉流场数值计算,并结合PIV艉流场模型试验结果对数值计算结果的准确性进行验证,得到合适的艉流场数值计算方法。在此基础上,采用3种人工智能算法构建艉流场快速预报模型,通过对比分析不同人工智能算法对肥大型船艉流场的预测效果得到合适的算法模型,为肥大型船艉流场快速预报提供参考,主要得到以下结论:
1) 基于CFD方法开展典型肥大型船艉流场数值计算,并将计算结果与PIV试验结果相对比,结果显示该数值计算方法具有较高的计算精度;
2) 以肥大型船艉部线型特征参数为输入参数,以桨盘面伴流均匀度、平均伴流分数和0.7R处平均轴向伴流分数为输出参数,采用基于人工智能算法构建的艉流场快速预报模型,能实现对目标船艉流场的快速预报;
3) 测试结果显示,本文建立的艉流场快速预报模型具有较高的计算精度,流场特征参数预测误差大部分都在2.00%以内,该模型可供同类肥大型散货船的艉流场快速预测参考。