基于位移传感器的玉米播种机漏取种检测方法
2023-09-01韩玉婷
韩玉婷
(南阳技师学院,473000,河南南阳)
农业是保证民生的基础产业,因此自古以来人们一直致力于农业种植方面的研究,如改良粮食品种,优化种植工具,在提高粮食产量和种植效率方面付出了极大的时间、精力。随着人们不断地深入研究,在粮食种植方面取得了很多成果,发明了各种种植工具,使得人工种植逐渐向着半自动、自动化种植快速发展。玉米是粮食种植中常见品种,以往通过人工种植时,不仅效率较低,而且对播种粒数也很难准确把握,这给后期定苗造成了很多阻碍,增加了工作量[1]。面对这种情况,当前玉米种植时会选择玉米播种机来代替人工,不仅效率较高,而且也能保证取种的一致性。然而,尽管如此,播种机也不是毫无缺点的,会出现漏取种的现象,这是每台播种机都无法避免的,只是存在有的播种机漏取种几率不高、有的播种机漏取种几率较高的区别[2]。漏取种会直接影响玉米种植产量,因此为保证种植产量,方便后期进行漏播补种,进行玉米播种机漏取种检测具有重要的现实意义。
关于播种机漏播检测问题,刘树峰等提出了一种基于激光对射传感器的检测方法,通过激光对射传感器获取种勺高度数据,然后将该数据与安装间距进行对比,当前者小于后者时,就认为排种勺中无粮种,即发生漏取种现象[3];石兵等提出了一种基于光电传感器的检测方法,通过判断光电信号是否被种子遮挡住来判断是否发生漏播种问题,光电信号被遮挡,说明排种器中有种子,光电信号没被遮挡,说明排种器中没有种子,由此完成漏播种检测[4]。
虽然前人研究都取得了一定成果,但是多数是针对完全没有取种的情况的,当播种机取种了却少于设定取种粒数时,很难分辨出来。漏取种不仅包括没有种子,还包括少取种的情况,因此以往的漏取种检测方法还有待进一步改进。为此,提出一种基于位移传感器的玉米播种机漏取种检测方法。
1 玉米播种机漏取种检测研究
玉米播种机的使用虽然在很大程度上提高了生产效率,但是其存在的漏取种问题同样不可忽视[5]。为此,提出一种基于位移传感器的玉米播种机漏取种检测方法。该研究主要分为两个步骤,即播种机取种装置定位、取种数量检测。前者目的是确定是否能够取种,后者目的是确定取种数量是否正确。二者都达到设定条件,即认定为没有发生漏取种情况;否则,有一项没有达到设定条件,则认为发生漏取种情况并同时进行漏取种预警。
1.1 基于位移传感器的取种装置定位
在漏取种检测中,首要的是确定取种装置的位置,只有取种装置到达指定的位置,才能保证取种的成功。一旦偏离指定位置,不是发生空取问题,就是发生少取问题。要确定取种装置在三维空间中的具体位置,需要用到一种位移传感器,即激光位移传感器[6]。通过该传感器能够确定到取种装置之间的距离,原理如图1 所示。
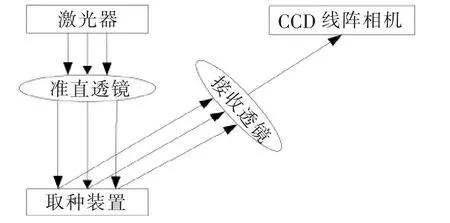
图1 激光位移传感器测距原理示意图
激光位移传感器测量到取种装置之间的距离具体过程如下。
(1)激光器向取种装置发射激光光束。
(2)当激光光束接触到取种装置时,激光被反射。
(3)反射激光通过接收透镜。
(4)通过接收透镜聚集进入到CCD 线阵相机中。
(5)借助三角法测量理论,计算得出激光位移传感器到取种装置之间的距离。计算公式如下:
式中:A 是激光位移传感器到取种装置之间的距离;a是光斑在传感器中的位移量;b 是物距;ϑ 是激光束入射光轴与成像透镜光轴之间的夹角;c 是像距;δ 是入射角。
(6)在测距中,受到各种因素的限制,测量的距离会存在一定的误差。针对这一点,利用BP 神经网络算法进行误差校正和补偿,提高测距准确度,具体过程为:①确定导致测距存在误差的主要指标,以此作为训练样本的输入数据;②确定训练样本中的误差预期输出数据;③将误差主要影响指标输入到BP 神经网络算法当中,进行三层运算,输出结果;④将输出结果与误差预期输出数据进行对比,当二者之间的差值大于设定的阈值,需要调整算法的权值和阈值,否则,输出训练成熟的误差校正模型;⑤输入待校正激光位移传感器误差影响指标数据,得出校正误差值;⑥将校正误差值与原始激光位移传感器测距结果相加,得到更为准确的激光位移传感器到取种装置之间的距离值。
应用取大运算和取小运算分别计算相对最大(最优年)优属度g=(g1,g2,…gm)T和相对最小(最劣年)优属度 b=(b1,b2,…bm)T。
在得到激光位移传感器到取种装置之间的精确距离之后,以激光位移传感器为零点,建立坐标系。结合激光束入射光轴与成像透镜光轴之间的夹角和入射角,得出玉米取种装置的三维空间坐标[7]。
式中:X、Y、Z 是玉米取种装置的三维坐标。
到这一步,将玉米取种装置的三维坐标(X,Y,Z)与指定的取种位置空间坐标进行对比,可以判断玉米取种装置是否到达指定位置。
为进一步确定取种装置能否接触到玉米种,可以计算二者之间的距离。计算公式如下:
经过上述研究,可以完成一种漏取种类型的判定,即是否存在空取种。
1.2 取种数量检测
式中:G 是薄膜压力传感器检测出来的压力值;T1,T2是取值阈值的极小值和极大值。
当存在少取种时,报警器会进行蓝光预警;当存在多取种时,报警器会进行红光预警。至此,完成了取种数量检测,为少取种现象的判断提供了依据[9]。
1.3 基于漫反射激光传感器的漏播种检验
玉米种子在从取种完成到播种过程中,全程处于动态环境中,因此种子会存在滑落或者卡到下播口的问题,这种现象同样会导致漏播种现象[10]。针对这一现象,利用漫反射激光传感器进行最后一步的漏取种检验,将该传感器置于取种装置旁,使激光射线对准取种勺正中位置,取种勺中没有玉米种子时,报警器会进行蓝光预警,以此检验是否存在漏播种现象。
(1)对播种机进行测速,得到车轮运行速度。计算公式如下:
式中:v 是玉米播种机的运行速度;Q 是车轮直径;I是玉米播种机带动车轮转动作业的距离;U 是车速编码器脉冲累计数;U1是车速编码器输出脉冲数;R 是车速编码器分辨率;h 是校核系数;t 是车速更新周期。
(2)计算玉米下播粒距,计算公式如下:
式中:L 是玉米下播粒距;vi是第i 个脉冲间隔内玉米播种机车速;Δt 是相邻脉冲时间间隔;n 是脉冲间隔数量。
(3)取种检验,检验标准如下:
式中:ΔL 代表玉米下播粒距阈值。当漏播种发生时,漫反射激光传感器的报警器同样会进行蓝光预警,能够极大保证漏播种问题被及时发现,为后续漏播种补植提供了可靠的参考,保证了玉米种植的质量。
2 检测方法应用测试与分析
为测试所研究的基于位移传感器的检测方法在玉米播种机漏取种检测中的应用效果,与基于激光对射传感器的检测方法、基于光电传感器的检测方法一起进行对比实验。
2.1 研究对象概况
在漏取种检测实验中,主要需要用到玉米种子、播种机两个对象。这两个对象的基础参数如下表1 所示。
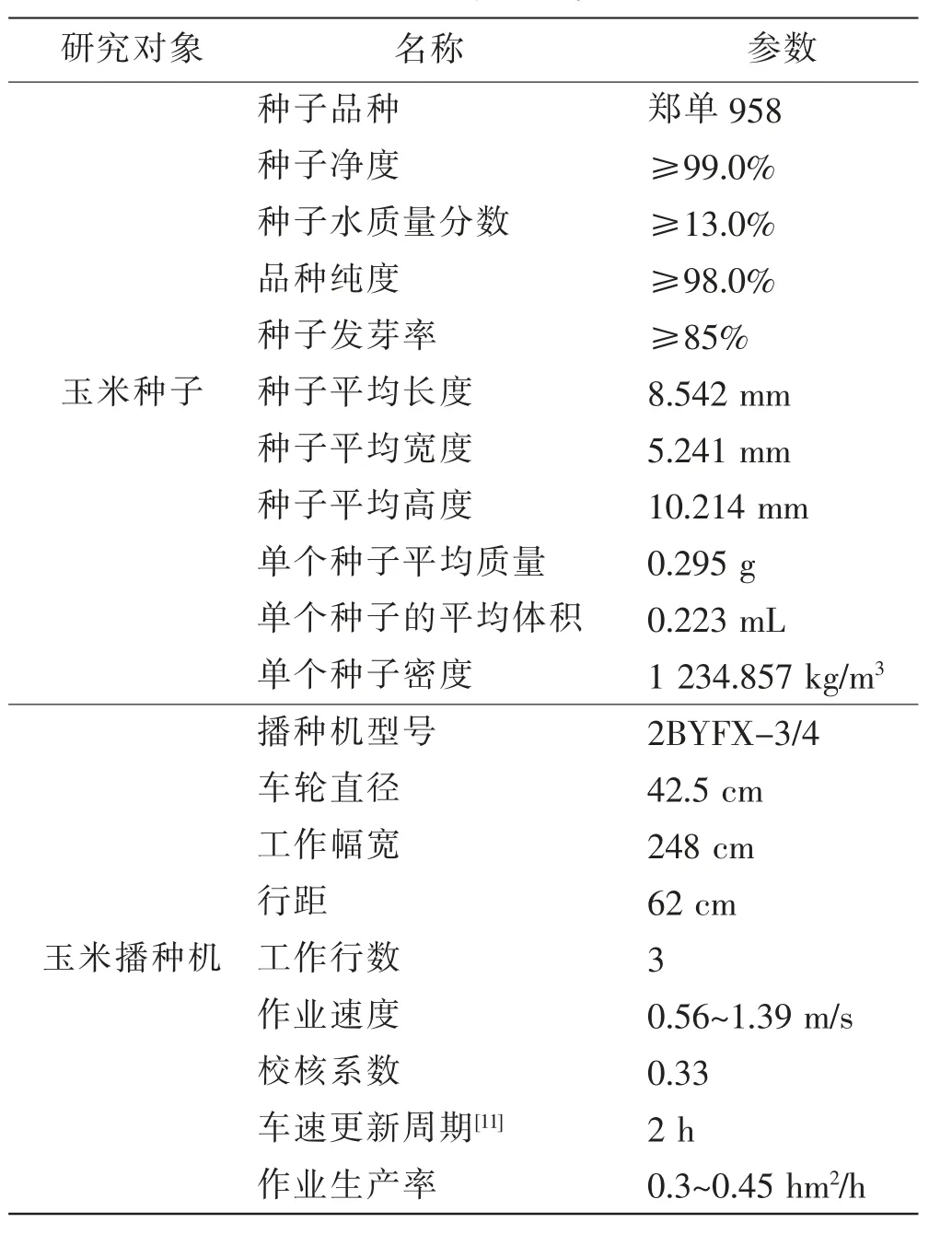
表1 研究对象基础参数表
2.2 取种装置定位结果
为保证测试结果的有效性,给定14 个取种位置,然后基于章节1.1 研究,利用位移传感器定位取种装置位置并计算与给定取种位置的误差,最后计算取种装置与玉米种之间的距离,判断是否发生空取问题。结果如表2 所示。
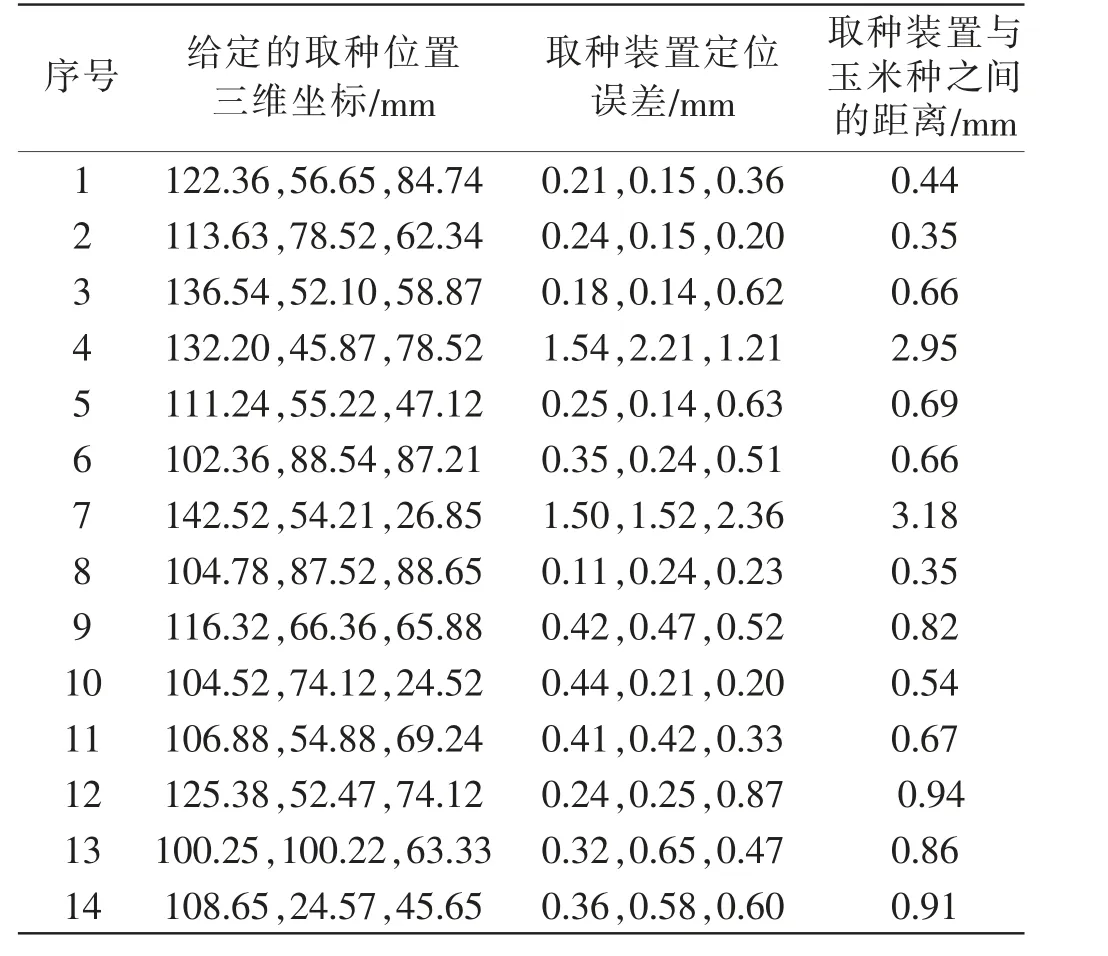
表2 取种装置定位测试结果表
从表2 可以看出,在14 次测试结果中,其中12 次位移传感器定位出的取种装置所在位置与给定取种位置之间的三维坐标误差较小,且计算出来的取种装置与玉米种之间的距离均小于1,由此说明这12 次取种均取到了玉米种子,没有发生空取现象;其余2 次的误差较大,取种装置与玉米种之间的距离大于1,说明这2 次没有取到种子,发生了空取问题。
2.3 漏取种检测方法性能对比分析
以往方法大部分能发现空取种的问题,但是针对少取种、漏播种现象则发现率较低。针对这一点,选取一段长为1 000 m 的种植带进行玉米播种过程模拟测试。考虑到玉米种子品种不同可能对漏取种检测存在一定的影响,在这里除了郑单958 外,另外选取其他两种品种的玉米种子一起作为测试对象。利用所研究方法及基于激光对射传感器的检测方法、基于光电传感器的检测方法对过程中漏取种进行检测。然后计算检测结果与实际结果之间的Dice 系数。该系数越大,检测准确性越高。结果如下图2 所示。
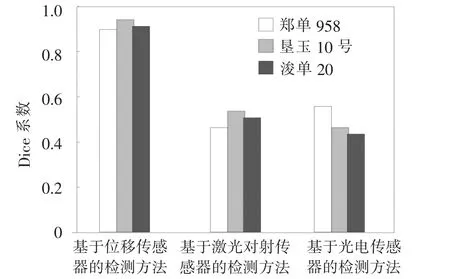
图2 Dice 系数对比图
从图2 可以看出,与基于激光对射传感器的检测方法、基于光电传感器的检测方法相比,基于位移传感器的检测方法的Dice 系数更大,由此说明所研究方法的漏取种检测准确性更高。
3 结语
玉米容易种植,成活率高,适应性强,因此在很多地区都可以种植,因此成为常见的农作物之一。随着机械化设备的不断研发,玉米种植逐渐从单纯的人工种植逐渐向着自动化、半自动化方向发展。然而,机械化种植也存在一个较大的问题,就是容易发生漏取种问题。在此背景下,研究一种基于位移传感器的玉米播种机漏取种检测方法。该方法通过三个环节的不断深入检测,防止了玉米种植过程中可能发生的漏取种问题,为后期漏取补偿提供了参考依据。
