基于U-net和随机森林的齿轮箱振动时频分析和故障诊断*
2023-08-31张品杨陈长征
张品杨,陈长征
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
0 引 言
行星齿轮箱作为风力发电机的关键部件之一,其具有结构紧凑、传动比大、运行平稳等特点[1]。因为风力发电机常常处于恶劣的工作环境中,所以行星齿轮箱也是风机传动链中最容易发生故障的部件。因此,通过对行星齿轮箱进行状态监测,尽早地发现其故障,避免发生计划外停机或严重的事故,对保证风电设备的安全运行具有重要意义[2]。
振动信号的分析方法一般可以分为时域、频域和时频域3类[3]。其中,时频域分析是处理非稳态信号的有力工具。
CHEN Xiao-long等人[4]提出了一种迭代广义时频重分配方法,其将非平稳多分量信号分解为恒定频率的单分量信号,采用该方法可以提高风电机组齿轮箱故障诊断中的时频可读性。孔子迁等人[5]利用卷积神经网络和双向门控循环单元,实现了时频特征融合背景下的行星齿轮箱端到端故障诊断目标。孟玲霞等人[6]建立了一个时变转速变载荷的风电机组齿轮箱振动信号模型,并在此基础上提出了一种新的时频脊阶次谱故障特征提取方法。DHAMANDE L S等人[7]针对轴承齿轮复合故障,提出了一种基于离散小波变换和连续小波变换的时频统计特征的故障诊断方法。
上述研究虽然能够进行较高精度的故障诊断任务,但是缺少直观的时频域证据来支撑诊断结论。
时频分割是分析时频分布的重要手段之一。例如,YAN Bao-kang等人[8]提出了一种基于多分辨率时频谱分割和振动信号稀疏分解的融合方法,该方法提高了最佳原子的计算速度和逼近精度。HUANG Chao-ming等人[9]采用时频域几何分布特征来分析经典的最大类间方差(OTSU)算法结果,并提出了一种评估摩擦副磨损程度的新方法。
上述研究虽然实现了对故障特征区域的分割目的,但是没有提出全局性的诊断模型。
综上所述,上述研究工作已经将深度学习应用于基于时频分析的故障诊断研究中,但是这些研究者通常旨在开发一种不可拆分的智能系统,以此来完成基于时频信息的行星齿轮箱故障诊断任务[10-13]。而时频分析的过往研究尚缺乏对于最新的全卷机神经网络的应用[14]。
因此,如果将时频分析和基于时频信息的故障诊断纳入到一个连续但模块化的诊断框架中(这与人工诊断过程更加相似),其就能为操作者提供更多、更全面的关于设备健康状态的支撑信息,并且使得故障诊断结果更为可信。为此,笔者构建一种用于风电机组齿轮箱振动时频分析和故障诊断的两阶段框架。
由于传统基于阈值的方法在处理高分辨率时频图时容易受到噪声干扰,因此,笔者在该框架中使用基于全卷积神经网络的语义分割方法,即以逐个像素点的形式对时频图像进行标记。
笔者使用U-net算法,将时频图中属于故障特征的像素点与背景区分开,然后使用形状特征来提取分割得到的二值图像中的有用信息;最后使用随机森林算法对行星齿轮箱的健康状态做出诊断。
1 基础理论
1.1 U-net
U-net模型是由RONNEBERGER O等人[15]234在2015年首次提出的,其最初被应用于医学图像分割领域。
作为全卷积神经网络的一种重要变体,U-net不包含全连接层,而是使用对称布置的卷积层对特征信息进行压缩和重构,从而在多尺度上利用上下文信息生成像素级的图像分割结果。目前,U-net模型及其变体在医学图像分割领域应用最多,并且正在向机器视觉、基于图像的故障诊断等领域拓展。
U-net的结构如图1所示。
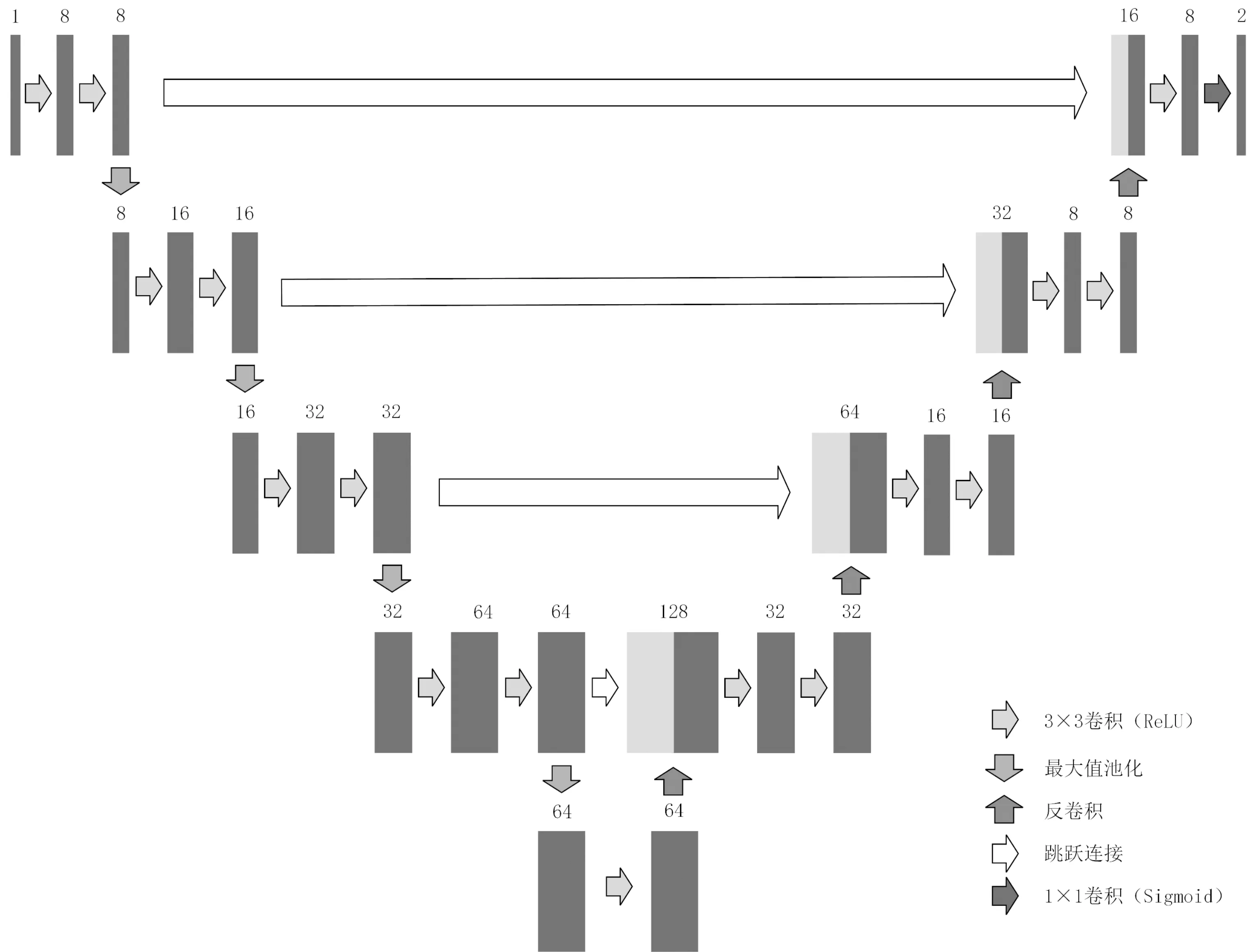
图1 U-net的结构
U-net模型的左边是压缩路径,也被称为编码路径,它由多个重复出现的压缩模块组成。压缩模块具有卷积神经网络的典型结构,包含3×3的卷积层、ReLU激活函数、批量归一化层、2×2的池化层等。
U-net模型的右边是扩张路径,也被称为解码路径。它的总体结构与压缩路径非常相似,同样包含若干个重复出现的扩张模块。相比于压缩模块,扩张模块中使用反卷积运算代替了卷积运算,并增加了来自压缩路径的跳跃连接层。基于上述设计,U-net呈现出简洁、优雅的U型结构。
为了更加细致地说明U-net模型,笔者将介绍其中的几个关键构件:
1)卷积层。它由一组可以设置高、宽的卷积核组成。可学习的卷积核使得卷积层能够对输入中的特征信息进行概括,并映射到新的特征空间中。此外,共享权重的设置使得卷积层与全连接层相比具有更低的计算复杂度。对于每个卷积核,其输出为:
(1)
式中:Xj为第j个输入通道;Oi为特征映射的第i个通道;f为激活函数;ωij为权重;bi为偏置项;
2)反卷积(有时也被称为转置卷积)。在U-net模型中,它的作用是提高特征映射的分辨率。为了获得与压缩路径相匹配的扩张能力,反卷积层采用2×2的反卷积核,并设置卷积步长为2;
3)激活函数。它赋予了卷积网络建模非线性映射的能力。常见的激活函数包括Sigmoid函数、Tanh函数、ELU、ReLU等。作为一种非饱和激活函数,ReLU函数能够缓解梯度消失和爆炸的问题,同时能够加速模型学习。因此,ReLU被用作压缩模块和扩张模块中的激活函数,其计算方法如下:
ReLU(x)=max(0,x)
(2)
4)批量归一化层。它是解决批量训练过程中的特征分布漂移问题的重要工具。严重的特征分布漂移会降低网络训练的稳定性,加剧过拟合现象发生,这在深度神经网络中尤为明显。批量归一化处理则将每层神经元的输出转化为标准正态分布。对于一个批量训练数据[x1,x2,…,xm],归一化处理后的结果如下:
(3)
(4)
(5)
(6)

1.2 形状特征
标记后的时频图结果可以被看作一种二值图像,它具有和输入图像相同的分辨率。因此,对下一步的故障分类算法来说,其存在数据冗余的问题。所以,笔者使用基于区域的形状特征方法来对数据进行特征提取。
几何矩[16]是一种简洁有效的基于区域的形状特征提取方法。对于函数f(x,y),它的(p,g)阶几何矩表达式为:
(7)
图形的一些重要区域属性可以从几何矩衍生出来:M00定义了一个图形的质量;(M10/M00,M01/M00)定义了一个图形的重心;(M20,M02)定义了一个图形的惯性矩,它描述了图形相对于坐标轴的质量分布。
上述性质对于表征标记后的时频图像中的特征区域分布情况十分有用。
1.3 随机森林
随机森林是一种基于集成学习思想的人工智能技术。针对传统决策树算法易发生过拟合的问题,LEO BREIMAN[17]开发了基于多个分类回归树(classific-ation and regression tree,CART)和装袋算法(bootstrap aggregating,Bagging)的集成分类器,并将其成功运用到图像分类领域。
在准备阶段,笔者先将原始数据集按比例划分为训练集和测试集(其中,训练集将用于后续决策树的训练,测试集将用于决策树的性能验证),然后使用Bagging方法,从训练集中有放回地随机抽取训练样本,并使用随机选取的特征子集对决策树进行训练,这种设置为决策树的构建增加了独立性,能够增强模型最终的抗噪声性能和泛化能力。在训练集中反复使用Bagging方法直到构建所需的所有决策树。随机森林算法的最终输出由所有决策树的结果统计得出。对于回归问题,通常将不同决策树预测值的平均值作为随机森林的输出。对于分类问题,基于决策树的输出采用多数投票的机制来确定最终输出。
随机森林算法主要步骤及流程如图2所示。
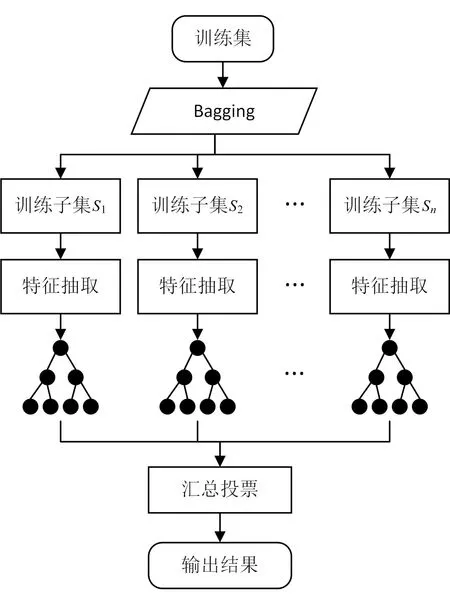
图2 随机森林算法流程图
随机森林算法的详细过程如下:
1)构建训练样本集,设置决策树个数、特征集大小等超参数;
2)对训练样本集进行随机采样,构建训练子集;
3)随机抽取特征;
4)基于CART算法,使用只含部分特征的训练子集建立决策树;
5)重复上述过程,直至得到完整森林;
6)将测试集代入训练好的随机森林;
7)将所有决策树的输出汇总投票,得到最终结果。
2 基于U-net和随机森林的两阶段框架
2.1 两阶段框架的结构
笔者提出的两阶段框架旨在发展一种有普遍适用性的故障诊断框架,其从时频数据中自动分析故障现象,并完成对风电齿轮箱的故障诊断任务。
为此,笔者提出了一种用于时频分析和故障分类的两阶段框架:在第一阶段,使用U-net对时频图中代表故障的特征区域进行标记,而后提取标记后的二值图像中的形状特征;在第二阶段,笔者训练随机森林算法,对形状特征进行分类,确定齿轮箱的健康状态。
两阶段框架的整体结构如图3所示。
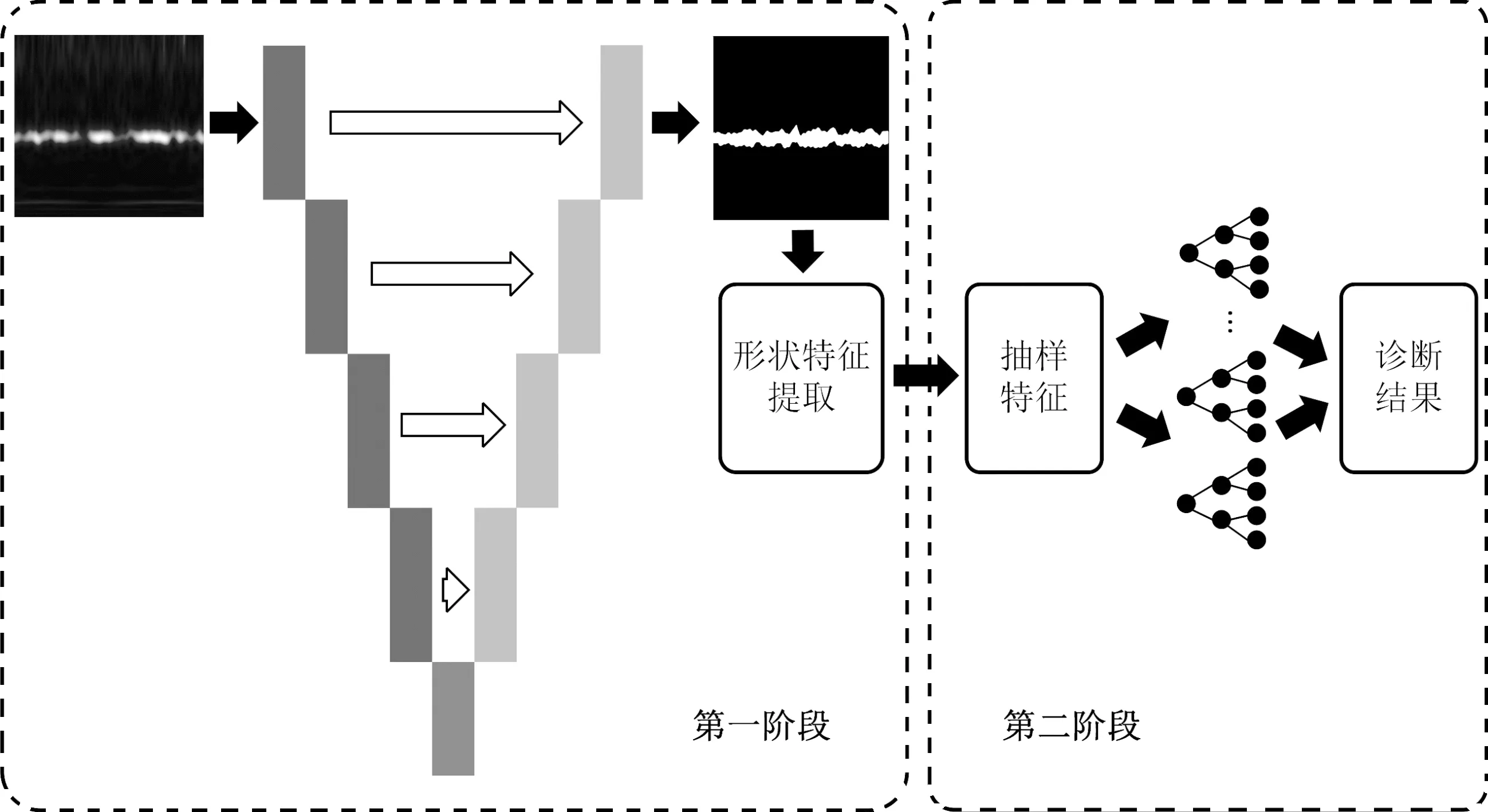
图3 两阶段框架的结构
2.2 分析算法的评价指标
笔者使用3种评价指标来定量地评估不同算法标记时频图中特征区域的能力,包括精度(P)、召回率(R)和F1分数。
共同使用3种指标有利于从更全面的角度分析算法性能:召回率能够反映算法避免遗漏有价值信息的能力;精度能够反映算法精准选取有价值信息的能力;F1分数能够反映算法在上述能力间的协调。3种指标的计算公式如下:
(8)
(9)
(10)
式中:TP为真阳性的像素点数;FP为假阳性的像素点数;FN为假阴性的像素点数。
3 实验验证
3.1 实验数据及其预处理
实验中使用的振动信号采集自华北地区某风电场的1.5 MW变桨控制风力发电机。
实验中配备的行星齿轮箱如图4所示。

图4 实验中的行星齿轮箱
传动链主要包括叶片转子、速比为100.48∶1的行星齿轮箱和双馈式异步发电机。行星齿轮箱包含两级行星齿轮传动和一个平行齿轮传动。
笔者采集数据时,加速度传感器以磁吸方式固定在第二个行星级的外齿圈处。
齿轮箱内部结构和测点位置如图5所示。

图5 行星齿轮箱内部结构及测点位置示意图
该实验共有4种健康状态,包括正常、齿圈齿面点蚀、行星轮啮合不对中、点蚀-不对中并发。上述故障都发生在第2个行星级,每种健康状态对应4台行星齿轮箱,所以该实验中共使用16台齿轮箱的振动数据。
风力机变转速运行的特点以及多变的环境因素,增加了齿轮箱分析和诊断的难度,使实验任务更具挑战性。
离线采集的采样频率设置为16 384 Hz,每个信号持续10 s,从每条信号中截取10个片段用于计算时频图。笔者使用归一化S变换[18],从信号片段中计算生成大小为512×512的时频图像,将计算所用的归一化因子设置为2。
4种健康状态下的振动信号片段如图6所示。
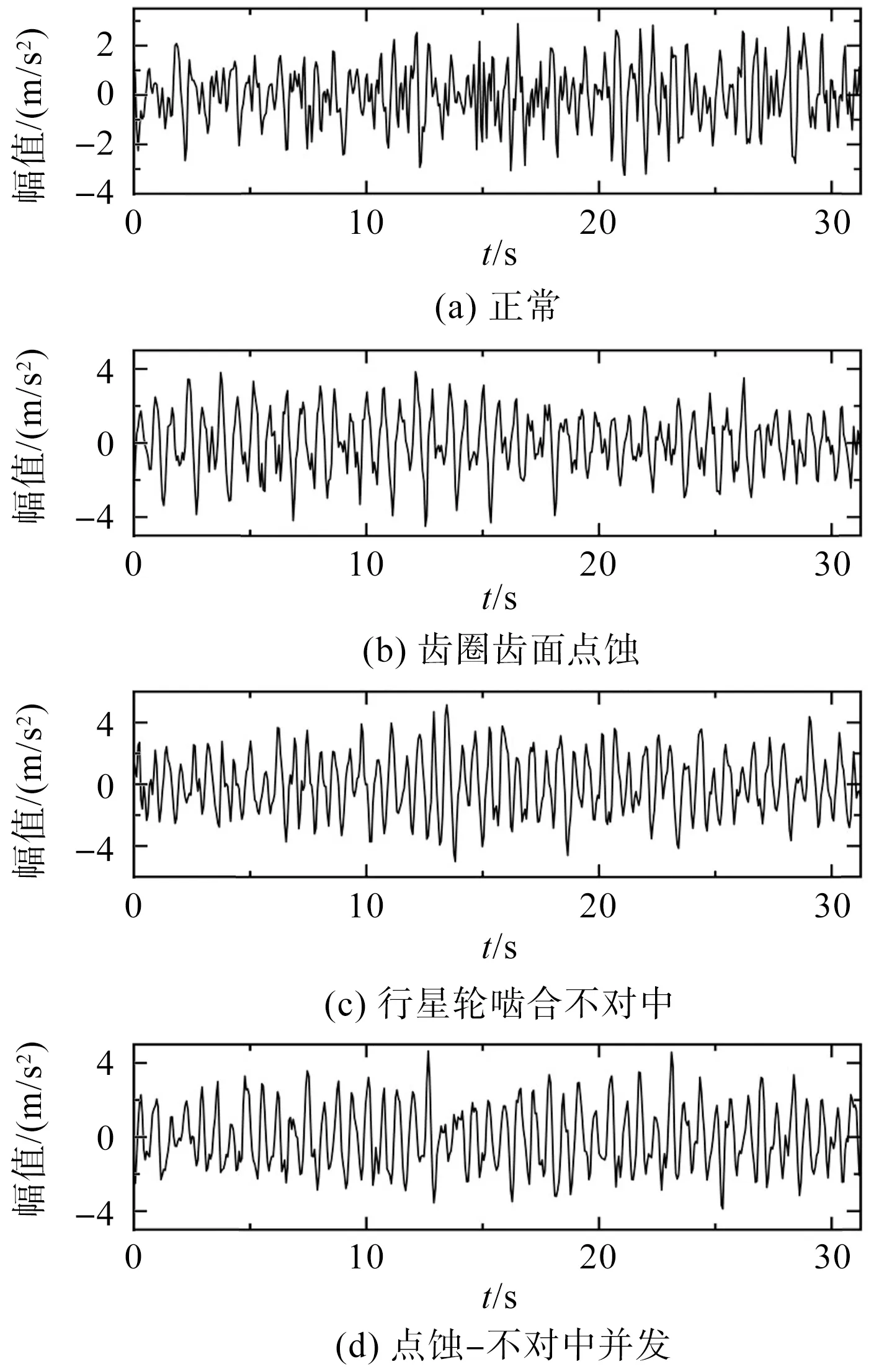
图6 4种健康状态下的振动信号片段
4种健康状态下的时频图像如图7所示。

图7 4种健康状态下的时频图
图7(a)、图7(c)分别在行星齿轮一倍、二倍啮合频率处显示出连续存在的带状特征区域;而图7(b)、图7(d)分别在行星齿轮一倍、二倍啮合频率处显示出近似相等时间间隔的斑块状特征区域。
通常情况下,使用过小的数据集容易造成深度学习算法发生过拟合问题。鉴于此,笔者使用基于Python语言的Augmentor工具包[19]对原始图像进行镜像或扭曲,从而将总样本数扩增了5倍,达到960个,基本上能够满足算法对数据总量的要求。
3.2 实验设置
实验中所用的U-net结构主要参考RONNEBERGER O等人[15]235-237的论文,并做了一些改动,以适应行星齿轮箱时频故障诊断任务。笔者使用Adam作为优化算法,使用交叉熵代价函数,将学习率设置为1×10-3,小批量训练的样本数设置为24,以加快训练速度。优化的最大迭代次数为50次,当算法在验证数据集上的代价经过连续5次迭代都不下降或没有明显改善时,模型即停止训练。
笔者在一台配置酷睿i5-10400处理器和英伟达GeForce GTX1660显卡的计算机上对所有实验进行操作。笔者使用的计算机为64位Windows10操作系统,其使用基于Python3.8的PyTorch深度学习框架。此外,笔者还使用了NumPy科学计算库以及PIL等图像处理库。
3.3 实验结果与分析
在语义分割方法中,图像中每个像素点都分配了一个标签。在该节中,时频图中的特征区域以灰度255突出显示,其他部分的灰度则被设置为0。实验数据按4:1比例被分割为不重叠的两个部分,分别作为训练集和测试集使用。
U-net模型对测试集中部分数据的分析结果如图8所示。
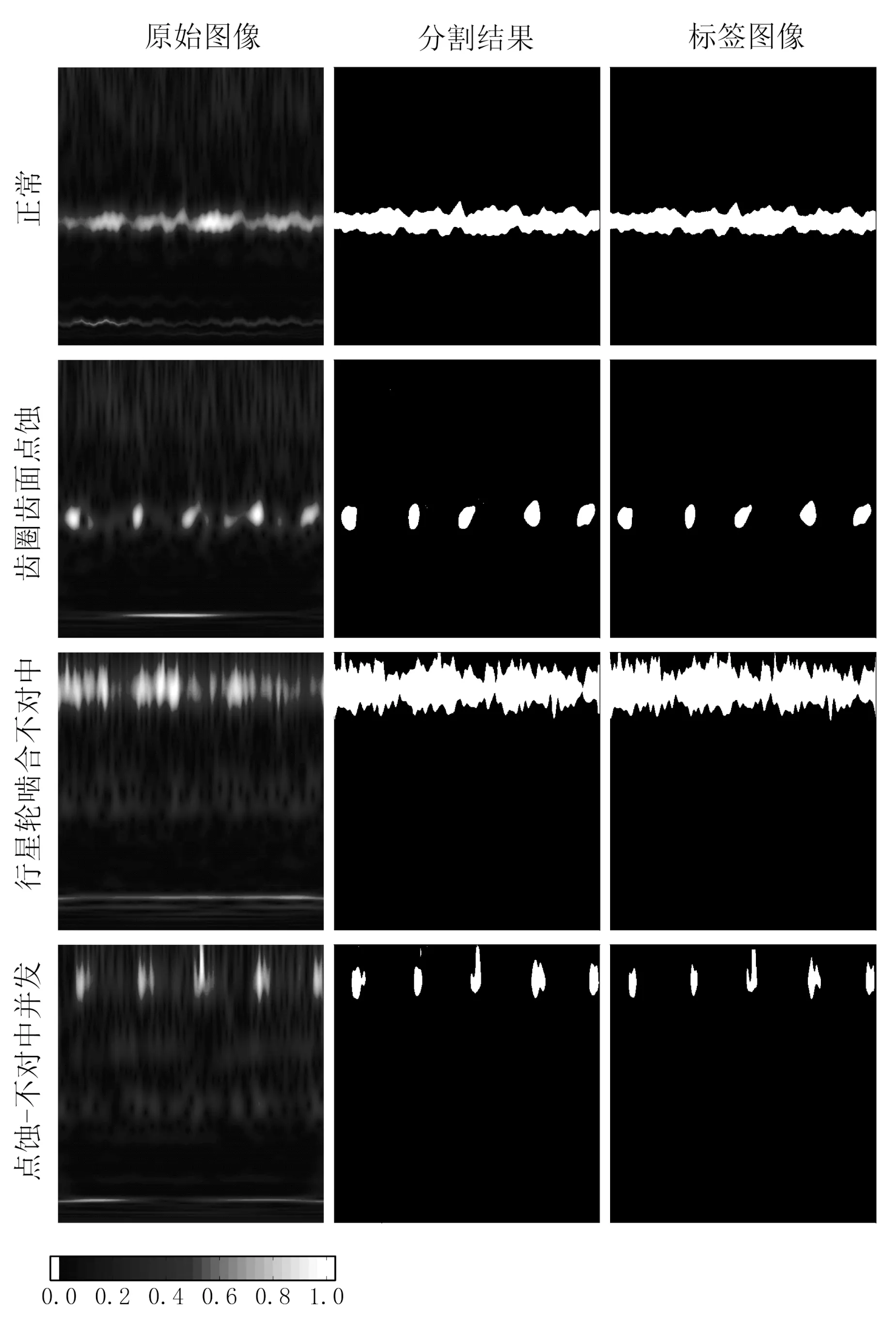
图8 U-net对4种健康状态下时频谱的分析结果
从图8中可以看到:总体而言,对于4种健康状态的样本,U-net都能准确地标记出故障特征区域,揭示时频图中包含的啮合或冲击现象。另一方面,齿面点蚀故障和点蚀-不对中并发故障是处理效果相对较差的2种故障,网络输出中有少量的噪点和错误边界。这是因为斑块状特征区域容易与强背景噪声相混淆。
为了更具体地展示U-net的分析性能和不同类型样本分析结果间的差异性,实验中详细的性能指标如表1所示。
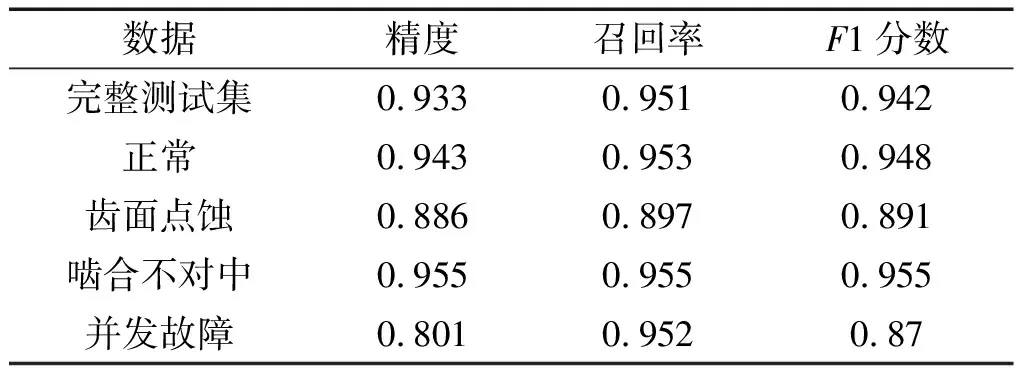
表1 U-net方法的性能指标
从表1中可以发现:U-net方法的精度、召回率、F1分数3项指标都是令人满意的。其中,F1分数达到了94.2%。齿面点蚀故障和点蚀-不对中并发2种故障的分析结果相对稍差,这与图8中显示的现象一致。
为了进一步验证U-net模型的性能,在使用相同数据集的情况下,笔者将其与OTSU方法和傅立叶滤波2种分析方法进行了对比,实验结果如图9所示。
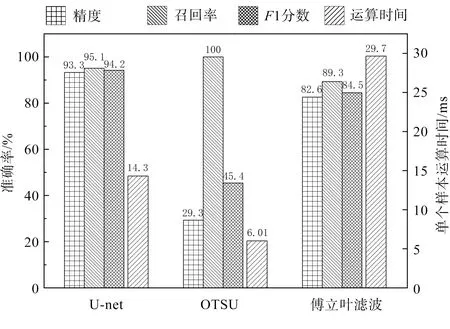
图9 不同算法的性能和时间消耗比较
图9中还给出了算法处理每个样本所消耗的时间。
由图9可知:得益于其强大的学习能力和上下文信息处理能力,U-net展现出比其他2种对比方法更优秀的综合性能;OTSU方法虽然给出了最高的计算效率,但是它的精度和召回率之间明显失调,即分割结果中包含过多的假阳性像素点;傅立叶滤波方法表现出比OTSU方法更好的性能,F1分数达到了84.5%,但是因为在图像处理过程中需要优化滤波器中掩膜的尺寸,所以其在计算效率方面表现不佳;U-net作为一种深度学习方法,其能够通过跳跃连接自动捕捉多尺度区域信息,无需手动调整模型参数,同时,也能够快速处理数据样本,满足实际工程应用中的实时性要求。
综上所述,在笔者提出的两阶段框架中,U-net能够胜任风电齿轮箱时频分析任务。
笔者开发这种高精度的时频分析方法的最终目的是为了对风电机组齿轮箱故障进行快速分类。
为了消除二值时频图中的冗余信息,笔者使用3个形状特征来提取标记后图像中的有价值特征。3个形状特征分别为:图像质量M00和两个方向的惯性矩M20、M02。其中,前者用于区分特征斑块与特征条带,后两者则对其相对位置做出判断。经过区域形状特征提取后,诊断阶段的输入信息总量从二维512×512=262 144压缩为一维1×3=3,实现了极大幅度的压缩目的。
被大幅压缩的特征空间使得使用简单的分类器成为可能。在两阶段框架中,笔者选择了随机森林算法来对4种齿轮箱健康状态进行快速分类。
随机森林算法在测试数据集上的分类混淆矩阵如图10所示。
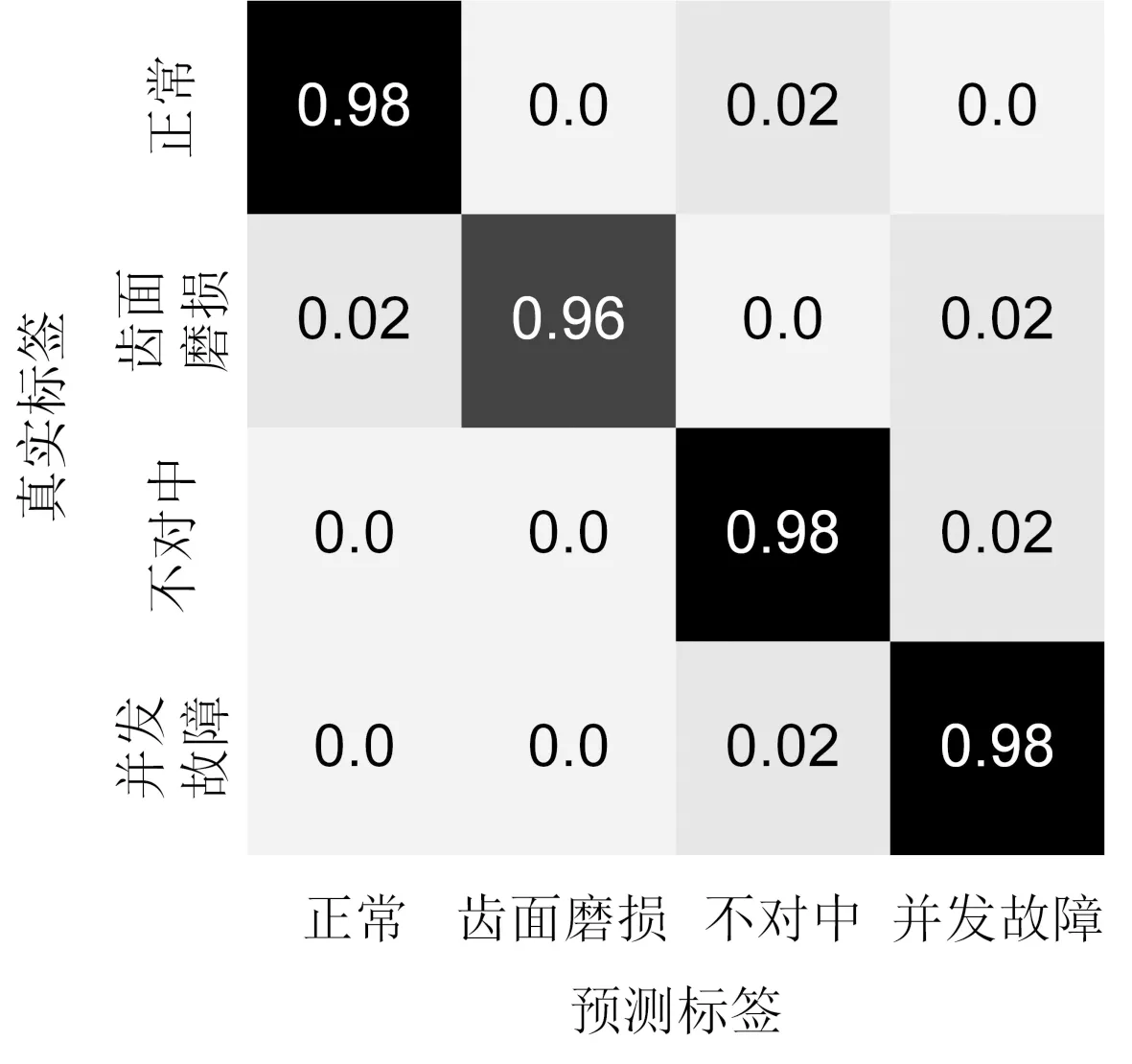
图10 故障分类混淆矩阵
由图10可知:总体而言,诊断的平均精度达到了97.4%,有限的数据量和压缩后的特征空间都没有对诊断结果产生不利影响;具体而言,行星轮啮合不对中故障和点蚀-不对中并发故障是容易相互混淆的两类故障,因为它们都具有二倍啮合频带能量偏高的特征;齿面点蚀故障是诊断精度最低的一类故障,根据上一小节中的观察,这是因为它更容易受到噪声污染。
综上所述,形状特征提取搭配随机森林算法能够有效地提取时频图像中的故障特征,并对风电机组齿轮箱的健康状态做出准确分类。
4 结束语
采用时频分析方法对风力发电机齿轮箱进行分析时,存在智能化程度低、故障诊断结论缺乏多域支撑、时频分析与故障诊断有功能鸿沟等问题,为此,笔者提出了一种用于风电齿轮箱振动时频分析和故障分类的两阶段框架,包含作为第一阶段的深度神经网络时频谱分析方法,和作为第二阶段的随机森林故障分类方法。
研究结论如下:
1)基于U-net模型的风电机组齿轮箱时频分析方法能够精准地标记振动时频图中的故障特征区域,解决了传统方法受背景噪声影响大、计算效率低、需要设置经验参数等问题。U-net模型通过对时频数据进行了对称压缩和扩张,捕捉了图像中的空间关联信息,实现了对故障特征斑块或条带的精准分割目的;
2)针对分析后的时频图像中存在数据冗余的问题,笔者采用形状特征法对二值图像中的形状信息和位置信息进行了提取,大幅度压缩了数据总量,减轻了第二阶段故障诊断系统的计算压力,同时为故障诊断结论提供了额外的支撑信息;
3)使用在役风力发电机行星齿轮箱振动数据对两阶段框架进行了实验验证,结果发现该两阶段框架达到了97.4%的平均诊断精度和0.942的时频分析F1分数。通过对比其他2种方法,证明了该两阶段框架的先进性,对实际工程中的风电机组齿轮箱时频分析和故障诊断具有一定的参考价值。
在后续的研究中,笔者将继续研究新型全卷积神经网络在时频分析领域的应用,并探索此类框架端到端的模型构建。
