起重机的防摆控制研究
2023-08-31方静
方 静
(尚风科技股份有限公司, 山西 太原 030006)
0 引言
塔式起重机为当前工程项目施工中必不可少的大型机械设备,在未来具有极大的应用前景。塔式起重机在实际施工过程中存在吊重摆动的情况,尤其是在刮风天气,其不仅影响起重机的工作效率而且存在极大的安全隐患,最终导致塔式起重机仅能单独的完成回转、变幅以及起升等动作,无法完成上述动作的协同工作,严重影响设备的工作效率。为解决塔式起重机在风载情况下回转、变幅以及起升等动作的协同工作,开展了塔式起重机的防摆控制研究。
1 塔式起重机动力学模型
为切实掌握塔式起重机在风载时其在定位防摆情况上所面临的实际问题,为后续解决其防摆奠定基础,需要精准建立塔式起重机的动力学模型。综合分析拉格朗日代入法和牛顿欧拉迭代法建模方法的特点,针对塔式起重机的动力学建模需求,本文将采用拉格朗日代入法对其在风载时多输入多输出、强耦合且非线性的动力学模型进行构建[1]。在建模时,需要做出如下假设:忽略钢丝绳、吊钩以及吊重的质量不计;将塔式起重机的吊重和小车视为没有体积的质点;忽略塔式起重机包含钢丝绳在内等所有机构的弹性变形,视为各部件的刚度足够大;对塔式起重机在实际施工过程中回转、变幅以及起升等动作的摩擦忽略不计;认为可对塔式起重机在风载环境中风速、风向等参数可精准测量。
根据塔式起重机在风载环境下的实际工况,可将风载分解为变幅运动和垂直于变幅运动的风载。因此,在风载时塔式起重机为五个输入对应五个输出的非线性系统,其中五个输入指的是大臂转矩、小车推力、起升力、变幅及垂直变幅的风载力,五个输出指的是大臂转角、小车位移、钢丝绳伸长量、吊重变幅及与其垂直的两个方向的摆角;而在非风载时塔式起重机属于三个输入对应五个输出的强耦合、非线性系统。所构建的塔式起重机在风载时对应的动力学模型如图1 所示。
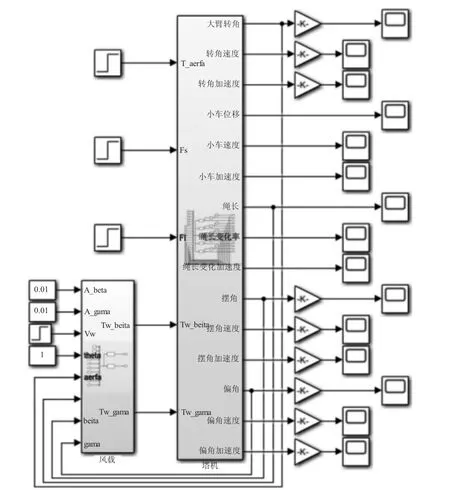
图1 塔式起重机动力学模型
2 塔式起重机防摆控制器设计
2.1 塔式起重机防摆控制机理
结合塔式起重机司机的操作经验,在实际施工中采取如下动作可以有效方式塔式起重机的防摆。具体如下:在初始阶段保证驱动小车以匀加速的状态运动,使得塔式起重机的负载稍微落后与吊绳;当距离目的地较远时,可控制驱动小车为匀速运动[2];当距离目的地较近时,可稍微减小对驱动小车的驱动力,此时对应驱动小车为匀减速运动,在负载惯性的作用下其会超前于吊绳;当快到目的地时,适当地增加驱动小车的驱动力,此时当负载达到目的时可将其摆角减小为0。
2.2 塔式起重机防摆控制器的设计
在工业控制算法中,PID 控制算法和模糊控制算法具有其各自的优势。其中,PID 控制算法具有结构简答、工作可靠、调整较快的优势;而模糊控制算法具有较强的抗干扰特性。因此,针对塔式起重机的防摆控制需求,拟采用PID 控制算法与模糊控制算法相结合方式对塔式起重机进行控制。
模糊PID 控制器的核心在于可根据系统的输出值采用模糊控制算法对PID 控制器中的比例、积分和微分三个环节的系数进行自适应整定,已达到精准、快速的控制效果。其中,对比例环节系数的整定可以提高控制系统的响应速度和精度;对积分环节系数的整定可以消除控制系统的稳态误差;对微分环节系数的整定可以消除并抑制系统的偏差[3]。
基于模糊PID 算法所设计的塔式起重机防摆控制器,并基于MATLAB软件构建仿真模型如图2 所示。

图2 塔式起重机防摆控制仿真模型
根据塔式起重机的实际工况确定PID 控制器中比例环节的初始参数为7.85,微分环节的初始参数为0.2,积分环节的初始参数为2.85。基于上述所构建的仿真模型对模糊PID 控制器和模糊控制器的控制效果进行对比,以对摆角控制为例,两种控制算法对应的控制效果如图3 所示。

图3 负载摆角控制效果对比
由图3 可知,采用模糊PID 控制器后负载摆角相比采用模糊控制器达到稳态的时间可以从15 s 缩短为8 s,直接提前7 s;而且,采用模糊PID 控制器在整个控制过程中系统出现的振动次数和幅值较小,即系统具有较好的稳定性。同理得出,针对驱动小车位移控制响应时间可直接缩短20 s,且在整个控制过程中无静差[4-5]。
总之,采用模糊PID 控制器对应塔式起重机的防摆控制具有很好的快速响应特性,而且在控制过程中无误差和超调量,极大地改善了塔式起重机的防摆控制效果。
3 塔式起重机防摆控制系统的设计
结合塔式起重机的实际工况和特点,采用以PAC为核心的电气控制系统,为保证控制过程的平稳性,系统中的各个机构采用变频调速方式进行控制。塔式起重机的防摆控制系统的整体结构如图4 所示。
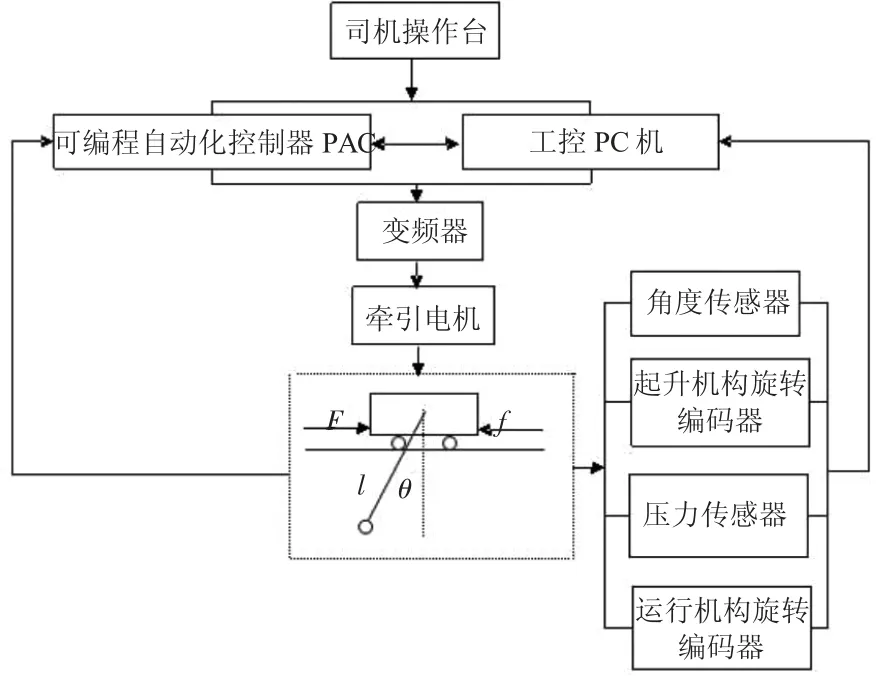
图4 塔式起重机防摆控制结构
PAC 相比传统PLC 控制器具有开放架构、控制功能丰富、通信速率高、实时性好以及成本低等优势。本系统采用型号为ADAM-5550 kW 的8 槽可编程控制器为核心实现塔式起重机防摆控制的目的。针对各机构变频控制的需求,系统采用三菱公司的FR-A740 系列变频器实现变频控制的功能。为实时掌握塔式起重机的实际工况,采用KeyenceLs 5000 系列的高速激光扫描测量仪对塔式起重机吊重摆角进行测量;采用电阻应变式压力传感器对塔式起重机的载重进行测量;采用2RHIB 型光电编码器对驱动小车的位移和起升高度进行测量。
在上述硬件支撑的基础上,并参照塔式起重机防摆控制机理设计如图5 所示的防摆控制软件流程。

图5 塔式起重机防摆控制流程
4 结语
塔式起重机为当前工程实施过程中的核心机械设备,本文研究重点为解决塔式起重机在实际施工过程中出现负载摆动的问题,不仅存在极大的安全隐患而且对应的工作效率降低。针对塔式起重机的防摆控制需求,提出基于模糊PID 控制器对塔式起重机驱动小车和负载摆角进行控制,通过仿真分析可知:采用模糊PID 控制器后可比模糊控制器具有更快的响应特性,其中,驱动小车达到稳态时间缩短20 s,负载摆角为零控制所需时间缩短7 s;而且在控制过程中无误差和超调量,极大地改善了塔式起重机的防摆控制效果。
