基于卷积神经网络的多功能雷达波形识别方法研究
2023-08-30崔积丰
崔积丰
(中国人民解放军91404部队,河北 秦皇岛 006001)
0 引言
多功能电扫描雷达通过控制馈电网络,实现探测波束的快速切换,从而具备了多任务灵活调度的能力[1-2],雷达的行为意图隐藏于其任务调度、甚至波束波形切换之中[3-4],对侦察机的雷达行为识别造成了极大的挑战[5]。
现阶段的多功能电扫描雷达的行为识别主要基于多功能电扫描雷达的多层级行为模型所进行。该模型将多功能雷达建模为了一个工作模式-工作状态-波形单元三层模型。具体而言,底层波形单元由雷达一个波束内所发射的一组波形脉冲组构成,雷达可从其波形库中选择不同波形,完成不同探测任务;而若干探测任务的不同组合,可构成雷达的不同工作状态;同样,工作状态的不同组合最终构成雷达的顶层级行为工作模式[6-8]。
本文针对雷达底层行为——波形单元层的波形进行了识别研究。当前波形识别研究多数仅对波形脉冲组内的脉冲重复周期(PRI,pulse recurrence interval)调制识别进行研究。文献[9]首次基于卷积神经网络(CNN,convolutional neural networks),实现了PRI调制模式的识别。文献[10]对CNN进行了优化,提出了基于全卷积神经网络的PRI调制识别方法,提升了实际侦察接收存在误差的情况下的识别准确率。而文献[11]则实现了基于深度自编码器的PRI调制识别,提升了深度学习类PRI调制识别的运算速度。但是,为了更好地分析相控阵雷达的底层行为,波形脉冲组的绝对参数取值同样重要,不同的脉冲宽度、PRI甚至脉冲积累数均能体现出雷达不同的任务行为意图。
因此,本文提出基于CNN算法[12]进行雷达波形的识别,将雷达的波形脉冲组参数,通过具有误差适应性的高斯钟形分布曲线进行序列化表征并作为CNN的输入,提升了参数测量误差条件下的波形识别鲁棒性,通过不同测量误差条件下的对比实验验证了本文所提算法的有效性。
1 识别对象的特征分析
传统机械扫描雷达受制于机械转动控制,雷达波束照射周期、雷达波形与脉冲重复间隔等特征无法快速变化,难以同时执行多个探测任务。电扫描相控阵雷达因其灵活、快速多变的多波束,具有搜索、探测、识别、跟踪与照射等多种作战功能和很强的抗干扰能力,多功能相控阵雷达已经广泛应用于地面远程预警系统、机载和舰载防空系统、成为了当前战场雷达预警探测的主要成员,如美国“爱国者”防空系统的AN/MPQ-53、舰载“宙斯盾”指挥控制系统的SPY-1,俄罗斯C-300防空武器系统的多功能雷达,以及美军的F-18舰载机、F-35舰载机、P-8A反潜巡逻机等机载雷达都是相控阵雷达。因此,针对相控阵雷达及其行为的侦察识别研究极为重要。
为了实现多种工作模式,雷达设计师通过事先考虑面临的所有可能情况,设计出一组最优的波形单元[13],这些波形单元构成一个集合,保存在称为“波形库”[14]的雷达内建的存储器中。不同波形可相对最优地实现不同探测任务。信号波形设计总体主要遵循以下几个原则[15]:
1)搜索时,采用大时宽和较窄带宽的信号,提高雷达回波的信号比,同时减少处理的距离单元数目和信号处理的工作量;
2)跟踪时,采用大时宽带宽积的信号,提高测距精度和距离分辨率;
3)目标测速采用脉冲重复频率较高的脉冲信号或者连续波信号;
4)存在距离模糊或速度模糊,采用重频参差的方法解模糊。
综上所述,想要实现对相控阵雷达行为的识别,首先要实现对相控阵雷达波形的准确分析与识别。
2 数学模型构建
根据信号波形设计总体原则,相控阵雷达在执行不同任务时,考虑到任务执行的目标检测、识别效果以及抗干扰效能,会在波形库中选择相应的最为适合的波形,而多变的相控阵雷达波形之间的根本区别,则在于波形脉冲组的参数以及脉间调制。对于雷达波形识别而言,实际上即为侦察接收的单部雷达在单次波位照射中的脉冲组,并在其参数及脉间调制之中,找到与波形标签之间的映射关系,实现脉冲组波形的分类。
本节首先对区分波形的两个本质特征——脉冲组参数与脉间调制进行分析,并在此基础上,构建出雷达波形识别的数学模型,为下文波形识别方法研究做好铺垫。
2.1 脉冲组参数
相控阵雷达在实际工作时,会将目标空域以波位的形式进行划分。同时,雷达会在波位中安排不同的任务,以实现对目标空域的搜索与特定目标跟踪,如近程低空搜索、近程高空搜索、中远程高空搜索、目标精确跟踪火控等等。在不同任务中,雷达设计不同的波形参数,适应不同条件下的探测。
例如,在近程低空搜索时,雷达需要在强杂波中实现准确目标检测,常会使用具有强杂波抑制能力的脉冲多普勒波形,并提高搜索数据率;在近程高空搜索时,雷达倾向于使用动目标显示波形,该波形有利于运动目标的探测;而对于中远程高空搜索,由于距离较远,雷达则会使用宽脉冲低重频的波形,在尽可能提升探测能量的同时,实现超远距离目标的搜索与探测;另外,对于目标精确跟踪火控任务而言,窄脉冲高重频的波形则是更优的选择[16-18]。
因此,雷达波形的异同,首先区别在于波形脉冲组中脉冲描述字(PDW,pulse description words)参数的异同。
由于雷达工作频点会随环境中尤其干扰信号的存在而发生一定程度的变化,所以将载频作为一维特征,列入波形识别脉冲组参数中,可能并非较好的选择。最终,本文提出将波形脉冲组的脉冲宽度、PRI、脉冲个数,作为波形识别的三维基础特征,进行波形识别。
具体而言,侦察方的脉冲宽度序列可通过脉冲到达时间及脉冲结束时间得到,如式(1)所示:
τ(k)=Tte(k)-Tts(k)
(1)
(2)
(3)
(4)

(5)
其中:N为该波形的脉冲组中的脉冲个数。
侦察方的PRI序列可通过脉冲到达时间所得,即
p(k)=Tts(k+1)-Tts(k)
(6)
(7)
(8)
2.2 脉间调制
除了雷达脉冲组参数的绝对取值以外,脉冲组内参数的变化情况,即脉间调制方式的不同,同样表征着不同的雷达行为。具体而言,雷达为了在探测的同时,出于解模糊或者抗干扰的需求,波形脉冲组内部的不同脉冲间,参数会一定程度上服从特定变化规律,即脉间调制模式。因此,不同波形脉冲组的脉间调制,也是区分雷达波形异同的关键。其中脉间的PRI调制最为常见,通常分为参差、抖动、滑变、正弦、参差与滑变复合等几种调制模式。
具体而言,参差、抖动、滑变、正弦、参差与滑变复合等几种调制模式特性如下。
1)抖动调制。抖动调制中,脉冲组内脉冲的PRI在一定范围内围绕中心值波动,可表示为:
p(k)=PJIT+v(k),k=1,2,...,N
(9)
式中,PJIT为抖动的中心值,v(k)为抖动量,N为脉冲组内脉冲数。
2)正弦调制。正弦调制中,脉冲组内脉冲的PRI按照近似满足正弦或余弦函数的规律变化,可表示为:
p(k)=PWOB+PW/2+PW/2cos(ωk),k=1,2,...,M
(10)
其中:PWOB为组内PRI的最小值,PW是组内PRI最大值与最小值之差(即振幅),ω是角频率。
3)参差调制:参差调制中,脉冲组内脉冲的PRI按照若干预设值组合,进行周期性重复。其中,单周期的PRI序列可表示为:
(11)
式中,Pk为单周期序列内的第k个PRI值,M为周期内PRI预设值数量。因此,该参差调制的骨架周期PF为:
(12)
4)滑变调制:滑变调制中,脉冲组内脉冲的PRI按照单调递增或递减的规律变化,可表示为:
p(k)=Pu+Suk,k=0,1,...,Lu-1
p(k)=Pd+Sdk,k=0,1,...,Ld-1
(13)
其中:Pu、Su和Lu分别为递增滑变的最小值、速率和序列长度。Pd、Sd和Ld分别为递减滑变最大值、速率和序列长度。
2.3 波形识别数学模型
(14)
该问题可通过深度学习优化求解。
然而,简单的套用深度学习可能难以获得良好的识别准确率。所以,针对式中的数学模型,如何进行定制性优化,进一步提升波形识别准确率,值得深入的研究。
3 基于CNN的波形识别架构
如上文所提,直接将深度学习类算法,包括深度学习卷积神经网络(CNN)应用于波形识别,可能难以获得良好的识别效果,例如,输入样本内参数归一化准则问题、根据网络输入样本形式的网络模型定制化构建问题等等。因此,本文提出基于波形参数序列化表征,作为深度学习卷积神经网络(CNN)的输入,进行波形识别。
3.1 波形参数序列化表征
常规的特征提取与分类需要其输入统一到特定尺度下,简单的归一化方法,如最大值最小值归一化,会导致波形脉宽、PRI参数的失真,都很难满足需要。
波形参数的序列化表征主要从两个方面入手,一是针对波形脉冲组参数的高斯分布化表征,用于分辨波形间所取参数,如脉宽、PRI、脉冲积累数是否相同;二是针对脉间PRI调制类型的归一化PRI序列表征,用于分辨PRI的变化规律是否相同。综合以上两点,可对雷达波形进行高效识别。
3.1.1 波形参数高斯分布化表征
波形参数不同,即意味着波形不同。但在实际应用中,技术体制、通道不一致等限制,雷达侦察会存在参数测量误差。因此,波形参数的序列化表征,需要考虑测量误差带来的影响,对测量误差具有鲁棒性。换言之,所表征的波形参数序列可为一个类概率分布序列,其中测量值处赋予高概率,而越远离测量值,概率则越低。而高斯钟形结构则是一种良好的表征形式,其取值随着远离中心均值,下降速度越来越快,并趋近于0。
本文以波形的脉冲个数、脉冲宽度、PRI为例,对其进行波形参数高斯分布化表征处理,如图1所示。可以看出,三个序列中,横轴分别为该波形中脉冲个数、脉冲宽度与PRI的取值范围,并在参数测量值处,序列幅度最高,且序列幅度随着远离测量值快速下降到0;当波形中不同脉冲参数测量值不同时,如图1(c)所示,PRI在400 μs附近抖动,则每个测量值处分别构建一个高斯钟形曲线,重叠处取最大值作为序列的最终幅度取值。
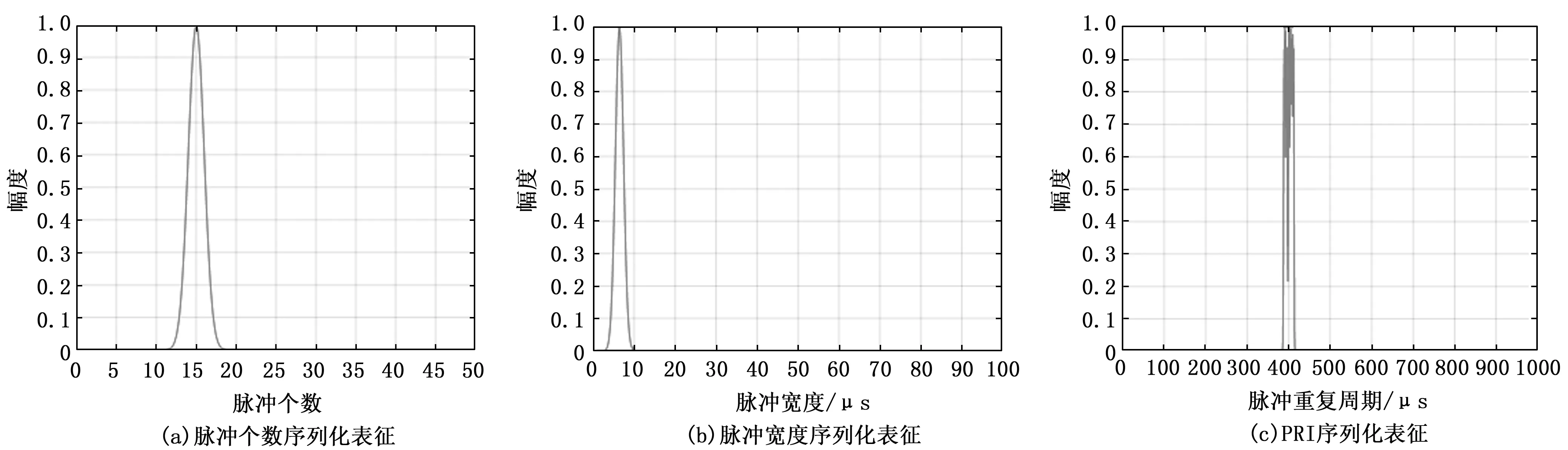
图1 波形参数高斯分布化表征处理
3.1.2 归一化PRI序列表征
归一化PRI序列表征即为将脉冲组中的PRI,进行基础的最大值最小值归一化,即
(15)

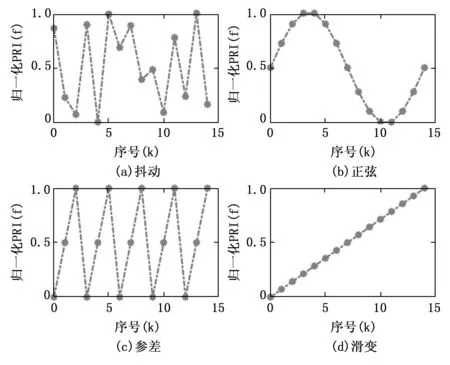
图2 脉间PRI调制的示例图
图2展示了4种脉间PRI调制的示例图并做最大值最小值归一化的结果,可以看到图(a)是PRI抖动调制,在PRI值在一定误差范围内进行抖动;图(b)是PRI正弦调制,可以看出PRI呈正弦函数变化;图(c)是PRI参差调制,PRI按照3个固定值的排列顺序进行周期性重复;图(d)是PRI滑变调制,PRI序列的变化规律呈线性递增。
3.2 波形识别CNN模型构建
通过上文分析可知,波形识别CNN的输入为4个长度不同的一维序列。因此,本文提出将一维CNN拓展出4列特征提取模块,分别提取各表征序列的特征,并在高维空间中进行特征拼接与融合,最后经过多层感知器对其进行分类。具体网络结构如后文所述,本部分先对波形识别的CNN模型原理进行表述。
3.2.1 CNN原理
深度学习最基础的网络模型形式是深度神经网络(DNN,deep neural network),DNN由多个全连接层构成,全连接层中包含多个神经元节点,每个神经元节点分别与相邻层神经元节点通过有向赋权边全连接,方向由网络底层指向网络高层,由此构成了一个大型映射网络。对每个节点进行非线性激活,可使网络具备非线性映射能力。最终可通过边权值的训练学习,使网络能够实现对复杂非线性问题求解的高度拟合[19]。
然而,由于DNN的全连接特性,其网络中边过多,在训练学习时,对训练样本的需求量极大,否则难以学习到真实非线性映射知识,导致训练结果陷入过拟合之中。最终,网络仅能在训练样本中获得较好的识别效果,而在实际应用中效果急剧退化[20]。
针对该问题,CNN是一个较好的解决方案,CNN通过局部连接和权值共享,大大减少了网络模型的参数量,已在图像处理和识别领域取得了令人满意的效果[21]。
具体而言,CNN一般由若干个卷积层、池化层以及顶端全连接层共同构成,下文将从三种网络层的角度对CNN进行介绍。
1)卷积层:卷积层是CNN的核心,它通过卷积特征提取器,将卷积层输入划分为多个区域,分别提取局部特征,而后将所有局部特征融合汇总,得到全局特征结果。由于该过程与人类视觉对事物的感受类似,人类对大型事物观察时,无法直接观察其全貌,只能从局部入手,最终形成全局理解。而上述卷积核所关注的局部区域则称为“感受野”。
具体而言,卷积层的特征提取过程如图3所示。
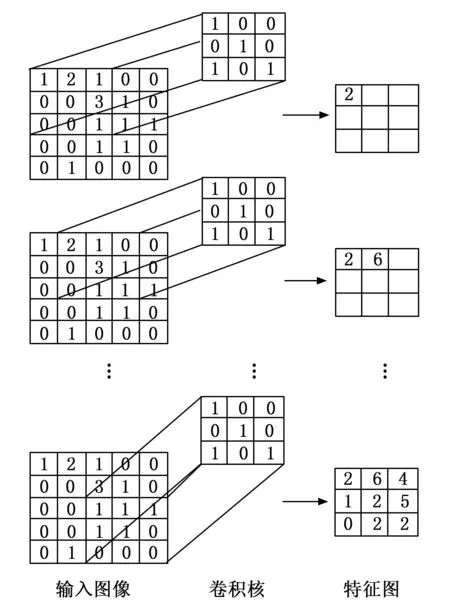
图3 卷积核的特征提取示意图
2)池化层:池化层又称下采样层,即基于池化区域内多个特征值输入,融合得到一个特征值输出。因此,通过池化过程将不重要的特征滤除,保留下关键特征,池化层能够在确保CNN效果的同时,进一步降低CNN的权值数量。
池化层一般有最大池化层和平均池化层两种,均可表示为如下形式:
(16)

3)全连接层:CNN的全连接层实际上与DNN中的全连接层相同,由若干神经元节点组成,可表示为如下形式:
xout=wTxin+b
(17)
其中:xout和xin分别为全连接层的输出特征和输入特征,w为边权值,b为偏置。
CNN中的全连接层一般置于网络顶端。而网络顶端多个全连接层进行组合,亦可称为多层感知器(MLP,multilayer perceptron),用于将卷积和池化后的最终特征进行直接的分类概率密度映射,最终得到CNN的分类结果。
3.2.2 波形识别CNN模型
本文提出的波形识别的CNN模型由一个一维四列CNN构成。
一维CNN的输入为序列,等价于将常见的二维CNN的输入图像其中一维尺寸缩减到1,其正向传播结果估计和反向传播训练的规则,与二维CNN一致。
对于四列CNN[22]而言,其网络输入增加为4个序列,通过4组卷积/池化组合,分别对4个输入序列进行特征的提取,并在进入全连接层之前,将特征进行首尾相接的拼接。同样,其正向传播结果估计和反向传播训练的规则,与二维CNN一致。
具体而言,如图4所示,波形识别的四列CNN模型,其输入数据为3.1节中预处理所得的PDW参数序列,包括脉冲个数序列,脉冲宽度序列,脉冲重复周期序列,脉冲重复周期归一化序列,尺寸分别为501×1、1 001×1、1 001×1和15×1。同时,模型的输出为雷达在当前波形编号序列,对应于L个类别的标签。
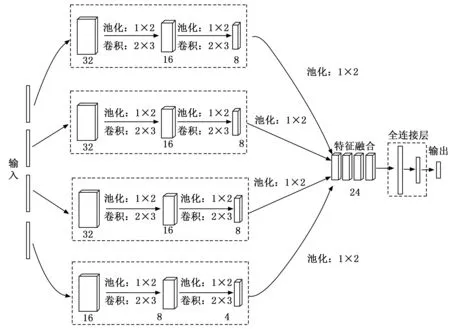
图4 波形识别CNN模型构建
4 仿真实验
为了验证所提算法的有效性,以表1中波形数据集为例,进行对比测试实验。设计目标数据集中不同波形之间存在着大量参数混叠,以增加波形识别难度。
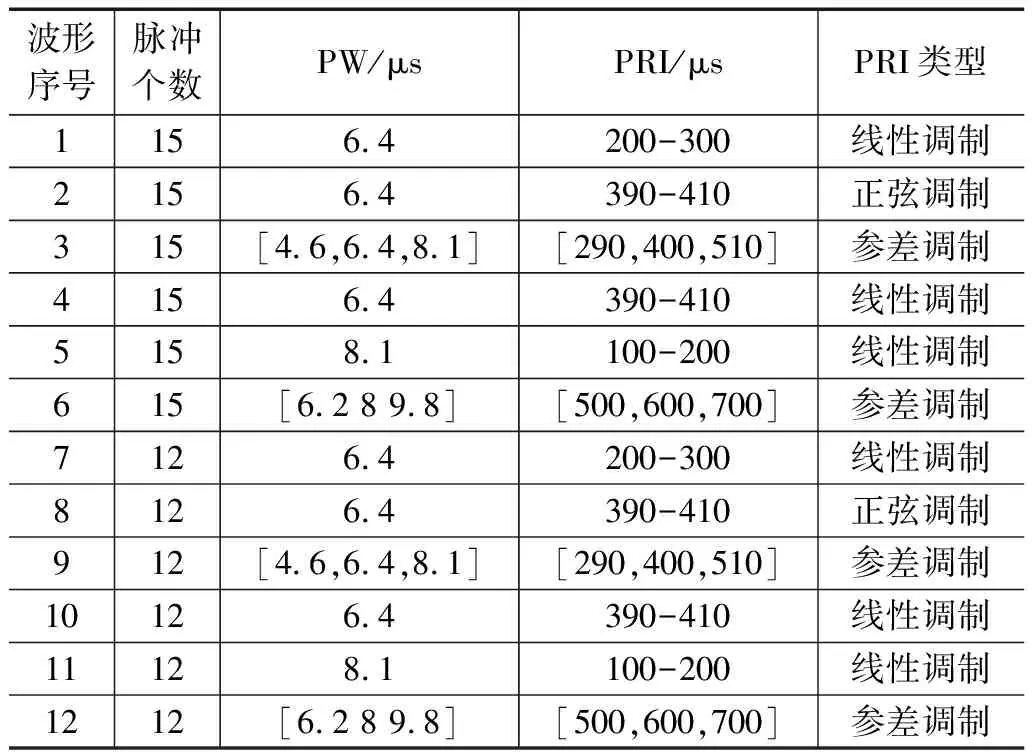
表1 信号波形参数表
测试实验中,每类标签的所对应的训练样本数与测试样本数比例为3:1,其中训练样本1 200个,测试样本400个。在训练CNN时,初始学习率设为2×10-4,为了CNN更好地收敛,学习率每100个epoch衰减为当前学习率的1/10,非输出层节点的激活函数为ReLU函数,输出层节点的激活函数为softmax函数,网络优化器为Adam,丢失率dropout设为0.5,批尺寸batch size为50。
4.1 不同输入信息对所提算法的影响
由分析可以得出,信号波形识别是通过对信号脉冲个数,脉冲宽度,脉冲重复周期,脉冲重复周期归一化序列的变化进而进行识别区分,进而实现对波形的区分。可对不同维度CNN添加不同的误差率进行识别测试,分析验证误差率对信号波形识别准确率的影响。
图5中,双列CNN的输入信息包括脉冲个数序列和脉冲重复周期序列;三列CNN的输入信息包括脉冲个数序列、脉冲宽度序列和脉冲重复周期序列;四列CNN的输入信息包括脉冲个数序列、脉冲宽度序列、脉冲重复周期序列和脉冲重复周期归一化序列。从图中可以看出,波形识别准确率随着CNN的列数增加而提高,在不同误差率条件下,四列CNN相比于双列CNN在误差率为7%和9%时大约由10%左右准确率的提升。因此,四列CNN通过四种尺度的特征提取,对波形的特征进行更丰富、更全面地考量,从而实现了准确率的提升。
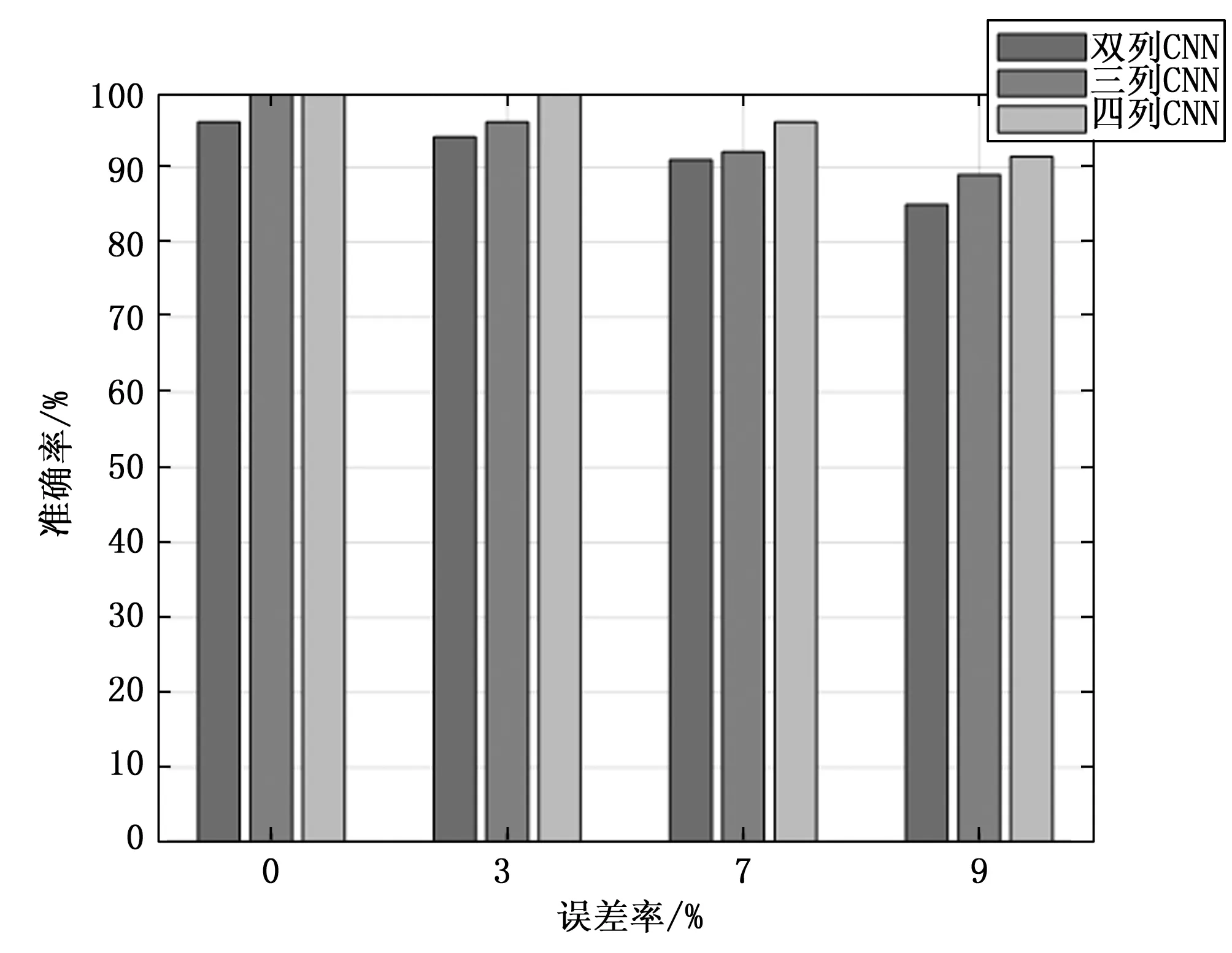
图5 不同输入信息条件下所提算法波形识别准确率对比
4.2 样本个数对所提算法的影响
对于深度学习而言,样本数量越大训练出来的分类器正确率越高,验证样本个数与识别正确率的关系。取样本数量分别为60,600,1 200进行训练测试,误差率分别为0,3%,7%,9%,测试结果如图6所示。
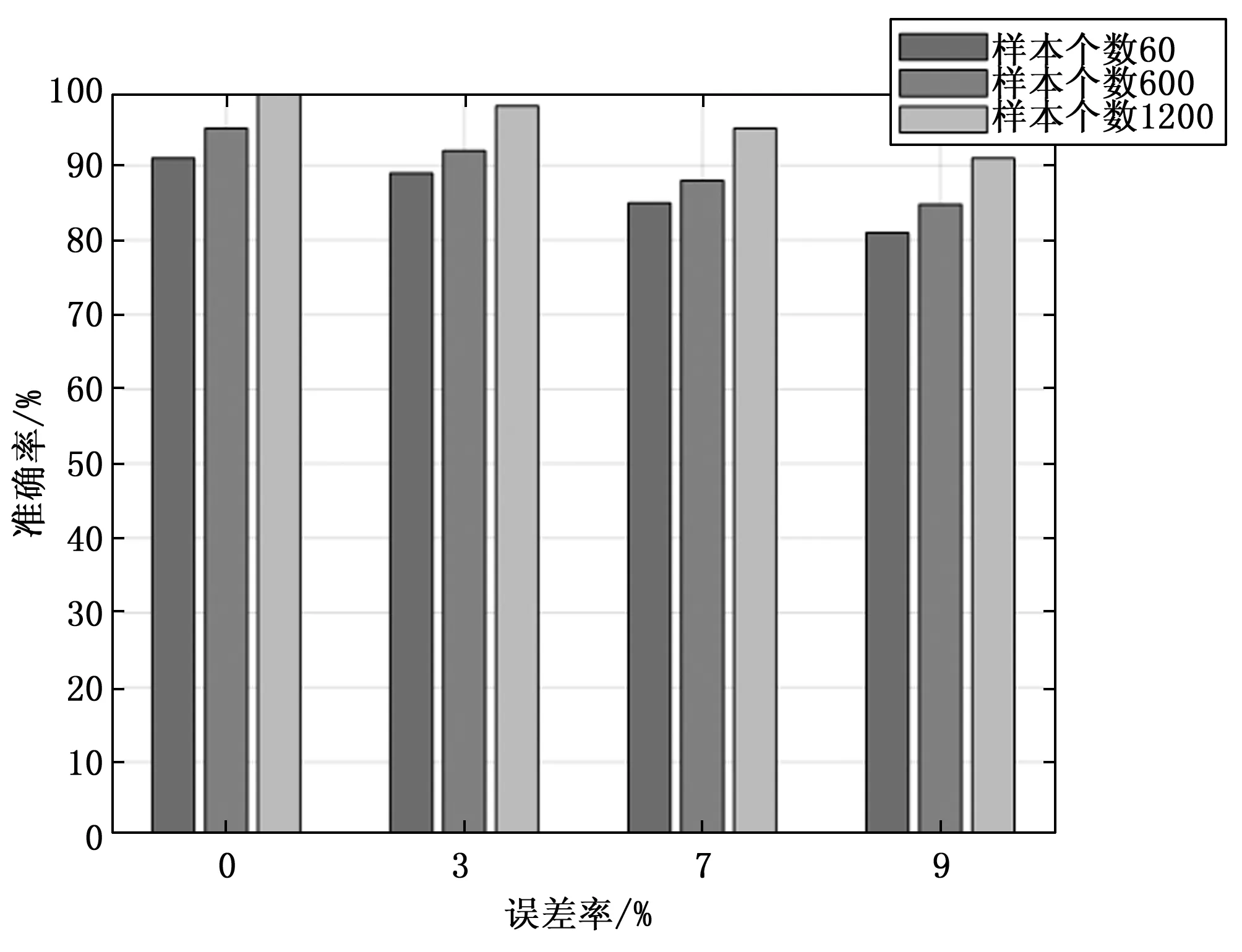
图6 不同样本个数条件下所提算法波形识别准确率对比
由图6可以看出,在所设计的误差率条件下,识别准确率都随着样本个数的增大而增大。具体而言,样本数为60时,本文所提的算法已具备基本的波形识别能力,尤其在参数测量误差在3%以内时,识别准确率接近90%;当样本数增大到600时,在各种误差条件下均得到了3%左右的识别准确率提升;且在样本个数进一步增加到1 200时,识别准确率几乎都可以达到95%以上,有着良好的识别效果。
4.3 对比实验
将本文所提算法与无波形参数序列化表征作为CNN输入的波形识别算法进行识别率的对比,实验结果如图7所示。
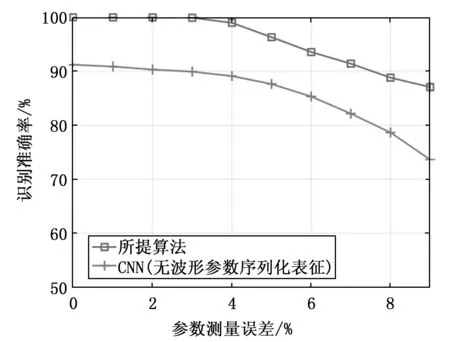
图7 不同参数测量误差条件下的对比试验结果
由图7可以看出,本文所提算法与对比算法的波形识别准确率均随参数测量误差的增大出现了一定程度的下降,但是,本文所提算法相比对比算法识别率在各参数测量误差条件下均有约10%的提升。尤其在参数测量误差较小的条件下,本文所提算法波形识别准确率接近了100%。这是由于将波形脉冲组参数进行人工序列化特征提炼。其中,波形参数高斯分布化表征,能够使CNN更为直接地分析出脉冲组参数的取值范围,且高斯分布化使该输入形式一定程度上具备了对噪声的鲁棒性;归一化PRI序列表征,使脉冲组的参数变化规律能够呈现到同一尺度上,降低了CNN对参数变化规律分析的难度。最终,本文所提算法实现了更优的波形识别效果。
5 结束语
本文针对多功能相控阵雷达的底层波形行为进行了分析,提出了一种基于波形参数序列化表征与CNN的波形识别算法。该算法通过将波形参数高斯分布化表征以及归一化PRI序列表征,结合具有多输入信息提取能力的多列CNN模型,实现了复杂波形的识别。参数混叠条件下的波形识别实验结果表明,本算法经过人工序列化特征提炼后,经由多列CNN的多分辨特征提取与分类,性能得到了大幅的提升。由于实际应用环境中存在有未知波形,因此,对于未知波形的开集识别与增量学习值得后续深入研究。