基于偏振信息的海面太阳耀光抑制
2023-08-29张聪立周俊焯纵园郝佳虞益挺
张聪立, 周俊焯,2,3, 纵园,2,3, 郝佳,2,3, 虞益挺,2,3*
(1.西北工业大学 宁波研究院,浙江 宁波 315103;2.西北工业大学 机电学院,陕西 西安 710072;3.空天微纳系统教育部重点实验室,陕西省微纳机电系统重点实验室,陕西 西安 710072)
1 引 言
我国是海洋资源大国,近年来随着海域边界军事冲突的加剧,加强对本国海域的监测力度是建设海洋强国、维护海洋权益的发展之要。然而,卫星遥感、航空遥感、地面监视等传统光强或光谱监测手段受太阳耀光的影响,难以满足海域动态监视监测的需要[1-2]。在受太阳耀光影响的水体区域,利用光电传感器对蛙人、鱼雷、潜艇等水下目标进行监测和识别时,反射耀光辐射几乎淹没了目标辐射,致使水下目标的关键信息缺失,严重阻碍海域的动态监视监测,因此,太阳耀光干扰下水下目标的检测识别技术成为海洋国防领域的研究热点[3-4]。
太阳耀光是直射太阳光经海面镜面反射进入传感器形成的强辐射信号,是造成传感器饱和失真的重要原因。Hochberg等[5]报道在美国国家航空航天局购买的45张IKONOS高分辨率卫星影像中,有9张被太阳耀光严重污染,有13张存在明显的耀光区域。为避免太阳耀光污染遥感影像,SeaWiFS水色遥感器具有使传感器偏离天顶方向20°的侧摆功能;不具备侧摆功能的遥感器则通过后期处理算法剔除太阳耀光[6],例如NASA的标准水色处理算法基于风向无关的Cox-Munk海面微面元法线概率统计模型对耀光区域创建掩膜,AVIRIS遥感卫星基于近红外波段海面离水辐射近零的假设估算影像中太阳耀光强度并对其进行去除。然而,使传感器侧摆的策略仍无法避免影像中大量耀光区域的产生;对耀光区域创建掩膜的方法会导致部分研究数据丢失,且由于光学遥感的尺度效应,Cox-Munk模型难以应用于高空间分辨率图像[7-8];而近红外波段离水辐射近零的假设对于浅水或植被丰富的水域是不准确的,存在局限性。近年来,基于偏振信息的水面耀光抑制方法因无需变换相机姿态,不用剔除捕获数据和不依赖前提假设等优势,而受到广大研究者的青睐。
由于水体的光学特性和人造目标的光学特性不同[9],水面反射太阳耀光与水下透射目标信息光存在明显的偏振特性差异,因此,利用偏振信息可实现太阳耀光和目标信息光的解耦分离。根据菲涅尔公式,水面的垂直方向反射比大于平行方向反射比,因此,传统方式是在探测器前安装单个平行线偏振片以抑制耀光的垂直偏振分量。然而,太阳耀光偏振方向受风速风向和太阳天顶角等因素影响,该方法的耀光抑制效果受到限制,且太阳耀光的平行偏振分量仍可能使光电探测器的像元饱和[10]。2016年,Zhao等[11]搭建基于双旋转偏振片的中波红外(3.7~4.8 μm)偏振成像系统,根据Cox-Munk模型推导太阳耀光的反射率空间分布,结合探测器的感光像元积分公式和大气辐射传输算法求解出双线偏振片探测最优夹角,从而提升目标与背景的对比度。2019年,Liang等[12]根据太阳耀光的时变闪烁特性提出基于偏振的海面杂波抑制方法,对每个偏振通道的时序图像逐像素点取最小值构成初始杂波抑制图像集合,再对不同偏振通道的初始杂波抑制图像逐像素点取最小值构成最终杂波抑制图像。然而,上述研究均未考虑目标反射光偏振传输的物理本质,并且成像目标局限于浮水物体。此外,直接偏振滤光法存在场景辐射能量减弱的劣势。2022年,张景华等[13]根据观测几何估计太阳耀光和水下目标信息光的偏振度,针对垂直方向光强图像的饱和失真问题,提出基于完全偏振分解的光强图像恢复方法,建立太阳耀光和水下目标信息光的解耦分离物理模型,获得比图像融合、图像修复、图像滤波等仅基于图像特征的太阳耀光抑制算法[14-15]更优的效果。
尽管基于偏振信息的太阳耀光抑制方法目前已取得初步成效,关于太阳耀光干扰下水下军事目标识别探测的研究却很少。现有的太阳耀光抑制物理模型基于平静水面假设,与不同风向、风速等因素影响下的实际海面状态有所不同。传统方法通常假设无偏水下目标反射光离水起偏后进入探测器,但研究表明[16-17]:水下目标信息光在离水前也存在偏振特性,尤其是在浅水区域。针对上述不足,本文利用水面反射太阳耀光和水下目标信息光的偏振特性差异提出基于物理模型的太阳耀光抑制算法;基于海面耀光归一化反射穆勒矩阵获取反射太阳耀光的偏振态空间分布;针对浅水区域水下目标建立光源-水下目标-探测器偏振态传输模型,基于被动水下成像物理模型引入水下偏振度修正因子,从而确定目标反射光偏振态。户外场景实验有力证明了本文方法抑制水面太阳耀光的有效性,从而助力我国海洋强国建设和海洋权益维护。
2 原 理
2.1 相机探测信号光的组成及分解
基于无人机载平台的光学遥感器对海面进行成像时,接收到的光学信号包含瑞利散射、气溶胶散射、海面反射太阳耀光、离水辐射和水下目标光等信号。晴朗无云天气下的低空遥感(<100 m)通常不考虑瑞利散射、气溶胶散射等大气散射项[18-19];离水辐射是太阳光与水体物质相互作用并后向散射离开水面形成的[20],主要用于计算水体叶绿素、无机悬浮物和有机黄色物质的分布信息,并非本文主要考虑的对象;水下目标信息光是太阳直射光折射穿过水面,在水次表面向下传输过程中受到水下目标反射,反射光向上经水面折射后形成的。
无人机搭载光学遥感器进行水下目标侦测时,主要考虑水下目标信息光IT,和波动海面镜反射太阳直射光形成的太阳耀光IR,如图1所示。IT和IR为两个相互独立的光强分量,单独从强度维度难以实现两种光成分的解耦分离;而海面反射太阳耀光和水下透射目标信息光的偏振态存在较大差异,因此偏振信息可作为光成分解耦的另一个维度。
光强相机前放置任意角度旋转的线偏振镜,在旋转线偏振镜的过程中可得最大光强图像Imax和最小光强图像Imin。假设目标信息光和太阳耀光具有一致的偏振方向,则Imax和Imin可分解为:
目标信息光和太阳耀光均为部分偏振光,设目标信息光的偏振度为ρT,太阳耀光的偏振度为ρR,根据偏振度的定义有:
结合式(1)和式(2),可从最大和最小光强图像中解耦得到目标信息光强度IT和太阳耀光强度IR:
由式(3)可知,目标信息光IT与太阳耀光偏振度ρR和目标信息光偏振度ρT有关:由于ρT处于分母位置,因此ρT影响分离后IT的强度;而ρR既处于分母位置,又与分子位置的最大光强图像Imax和最小光强图像Imin相关,因此ρR不仅影响IT的强度,并且直接决定消除耀光后透射图像的局部纹理和细节特征。
2.2 最大光强图像和最小光强图像的求解
不同偏振方向光强与斯托克斯参量之间的关系为:
式中:Ik为k索引对应偏振方向的光强;S0,S1,S2为线偏振斯托克斯参量;ϕk为k索引对应的偏振方向。为求解线偏振斯托克斯参量,至少需要捕获3幅不同偏振角度对应的偏振图像。
太阳耀光海面背景下,垂直偏振方向及其邻近方向光强图像存在大量饱和像元[10-11],阻碍场景斯托克斯参量的有效解算,因此需要选择若干幅非饱和偏振图像恢复场景偏振信息:
式中:k1,k2,k3分别为3幅非饱和偏振图像对应的索引。
求解式(5),得到S0,S1,S2的值,进而解算出最大光强图像Imax和最小光强图像Imin:
2.3 太阳耀光偏振度的求解
水面对太阳光在垂直和平行于入射主平面方向的反射比不同,因此无偏太阳光经水面反射后起偏。若已知两方向反射比,可得反射光偏振度为:
式中:rs,rp分别为垂直、平行方向的菲涅尔反射系数。根据非磁性物质的菲涅尔公式:
式中:n1,n2分别为入射、透射介质的折射率;θ1为入射角,θ2为折射角。已知θ1,n1,n2,结合斯涅尔定律即可求得水面反射太阳耀光的偏振度。
然而,受海洋潮汐、海流、海浪、湍流等海洋水体动力因素的影响,实际海面呈波浪状,不可直接应用菲涅尔公式计算波动海面的太阳耀光偏振度。1954年,Cox & Munk[21]提出波动海面可以用一组法线方向服从高斯分布的、遵循菲涅尔反射定律的镜像微面元近似,并根据海面某点处特定斜率发生的频率解释该点附近的海面平均亮度。不考虑风向因素,忽略Gram-Charlier展开式的Cox-Munk模型为[22]:

图2 光源-观测几何模型Fig.2 Source-viewing geometric model
利用倾斜坡面概率统计函数可以得到海面耀光的归一化反射率LGN[23]:
式中R(ω)为观测点反射率。将R(ω)替换为反射穆勒矩阵R(ω),即可得到海面耀光的归一化反射穆勒矩阵:
根据偏振光学理论,两层均匀介质的穆勒矩阵R(ω)为:
式中:δ为垂直偏振分量和水平偏振分量的相位差。
根据球面余弦定理,求得几何参量之间的数学关系为:
结合式(9)~式(14),得到水面反射太阳耀光的斯托克斯矢量为:
太阳耀光偏振度为:
玉溪市农业科学院针对近几年当地品种品质退化、产量不高及抗性较差等实际问题,借助云南省创新人才培养计划项目和云南省油菜产业技术体系玉溪综合试验站建设项目资金及玉溪育种重点实验室人才、技术和设备优势,通过自主选育[3-5]与合作引进适应当地栽培的油菜新品种进行比较试验研究,以期为当地农户在油菜品种选择上提供指导,为优质油菜品种的大力推广奠定基础,同时也为玉溪大力发展油菜产业提供技术支撑。
可见,虽然海水动力因素会改变海面粗糙度,但它对各斯托克斯参量造成的影响是同比例的,因此不会影响海面反射太阳耀光偏振度的空间分布。
2.4 目标透射光偏振度的求解
现有算法通常假定无偏水下目标信息光经水面起偏后进入相机,这种假设在目标信息光经水体介质悬浮粒子的多次吸收和散射后比较准确。但在浅水区域,无偏太阳光经水面起偏并折射进入水体,具有较强的偏振特性,且偏振光在散射介质中具有一定的保偏性[24],因此浅水区域可以等效为主动偏振光源照明水下目标的情景,目标反射光的偏振特性不可忽略,现有算法存在局限性。
为分析目标透射光的偏振度,可将浅水区域水下目标信息光的偏振传输分为3个阶段:(1)无偏太阳光经水面起偏后折射进入水体;(2)折射偏振光被目标表面反射后改变偏振特性;(3)反射偏振光经水-气界面二次折射后进入相机。偏振传输过程和相关几何参量如图3所示。
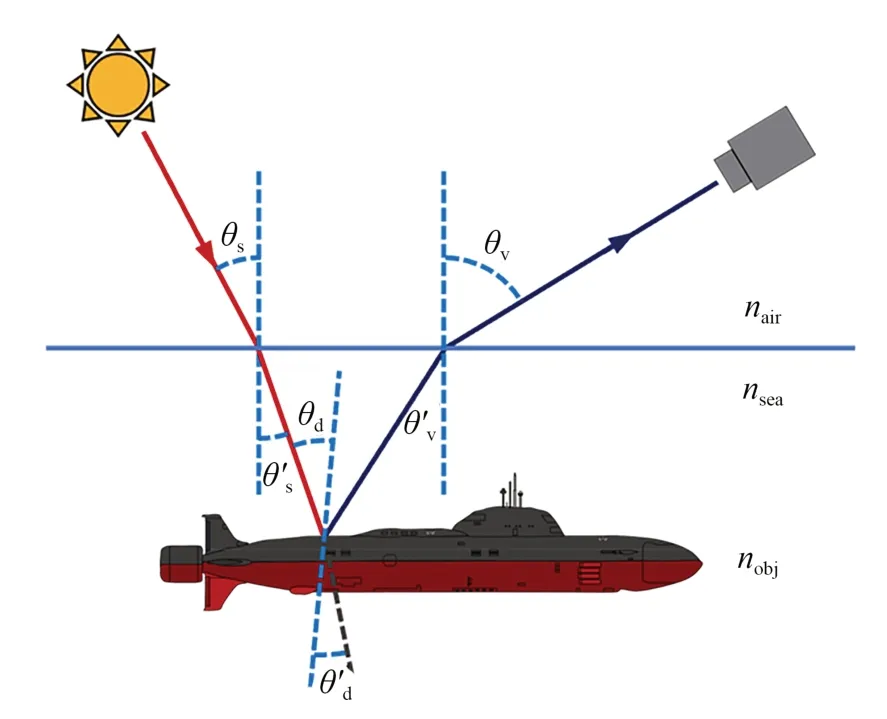
图3 浅水区域光源-水下目标-探测器偏振态传输模型Fig.3 Source-object-detector polarization transmission model in shallow sea region
根据水下目标信息光传输的3个阶段,利用菲涅尔公式计算各阶段的折射系数或反射系数,得到:
由此解得各阶段偏振相关的菲涅尔折射系数和反射系数。本文用穆勒矩阵描述3个阶段的偏振传输关系,透射光的穆勒矩阵Mt和反射光的穆勒矩阵Mr分别[25]为:
式中:θ1为入射角,θ2为折射角;a=θ1-θ2,b=θ1+θ2。
将(θs,θs')代入式(22)得到代入式(23)得到代入式(22)得到由此得到出射光的斯托克斯矢量Sout为:
则未修正的水下目标信息光偏振度ρ'T为:
2.5 目标透射光偏振度的修正
偏振光在实际水体的传输过程中,受水体和水体粒子的吸收、散射等影响,其偏振特性会在一定程度上衰减。因此,需要对式(25)得到的透射目标信息光偏振度进行修正。
根据以色列理工学院Schechner等[16]提出的被动水下成像物理模型,探测器接收到的光强信号Itotal主要包含场景的目标信息光S和后向散射光B,即:
从2.4节的分析中可知,水下目标反射光为部分偏振光,在未经水体粒子吸收和散射时,其偏振度ρD为:
则可得水下偏振度修正因子χ为:
由式(29)可知,仅需知道无穷远处后向散射光强度和有效目标辐射光强度的比值水体衰减系数c,以及光波在水中传输的距离z,即可求得水下偏振度修正因子χ。在水域条件和光照环境稳定的情况下为定值;在无人机载水下军事目标探测中,z值近似于潜海目标在水下的深度。
结合式(25)和式(29),得到修正后的透射目标信息光偏振度为:
综上所述,将偏振相机采集的多幅非饱和偏振图像代入式(5)、式(6)可求得最小强度图像Imin和最大强度图像Imax;根据波动海面归一化耀光反射穆勒矩阵模型,将太阳天顶角θs、观测天顶角θv代入式(8)和式(16),可求得太阳耀光偏振度ρR;根据光源-水下目标-探测器偏振传输模型,将太阳天顶角θs、观测天顶角θv和水下目标折射率nobj代入式(17)~式(25),并通过式(29)得到的水下退偏因子修正,可求得透射目标光偏振度ρT;将Imin,Imax,ρR,ρT代入式(3),得到太阳耀光反射图像IR和水下目标透射图像IT,实现海面太阳耀光抑制,算法流程如图4所示。
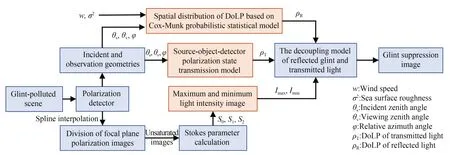
图4 海面太阳耀光抑制算法流程Fig.4 Flow chart of sun glint suppression algorithm on sea surface
3 户外场景实验和图像质量评价
3.1 户外场景实验
无人机载光学遥感器对水下军事目标进行探测时,易遭受强烈的海面反射太阳耀光,导致大面积传感器像元饱和,从而丢失水下军事目标特征信息。为模拟此场景,本文对天光照明环境下户外场景水下遥控潜艇进行偏振成像,并利用太阳耀光抑制算法进行图像处理,对强度图像和耀光抑制图像进行直观感受和量化对比。
数据采集时间为2022年12月6日,15时15分;地点北纬29°52′43″,东经121°39′47″;天气情况多云转晴;环境温度为12 ℃,北风1级;潜艇尺寸为350 mm(长)×50 mm(宽);拍摄距离为3 m。实验场景如图5所示,分焦平面偏振相机采集偏振图像(型号:FLIR BFS-PGE-51S5P-C),内置Sony IMX250MZR单色偏振传感器,波段为400~900 nm。
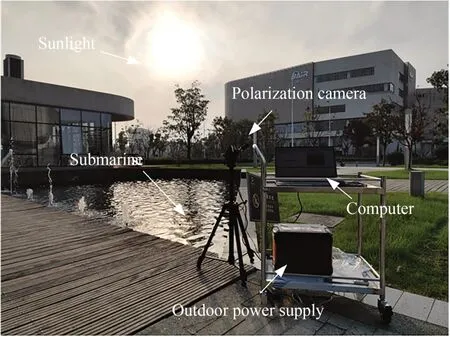
图5 户外实验场景Fig.5 Scene of outdoor experiments
使用偏振相机采集分焦平面偏振图像,并插值重构出0°,45°,90°,135°的偏振图像,由于0°偏振方向接近垂直偏振方向,容易导致像元饱和失真,因此仅将45°,90°,135°偏振图像代入式(5),解算出斯托克斯参量图像S0,S1,S2,进而由式(6)求得最大光强图像Imax和最小光强图像Imin。当天日出时间为6:36,日落时间为16:54,因此太阳天顶角约为64.89°,在太阳入射主平面内放置相机,即相对方位角φ为180°,调整相机观测天顶角为55°,可得太阳耀光的偏振度ρR为0.927 5。水体折射率nsea为1.33,潜艇模型材质为ABS塑料,其可见光波段的平均折射率nobj为1.57[27],计算得未修正的潜艇信息光偏振度ρ'T为0.815 6。参考浅水湖泊的吸收与散射系数[28],小风速条件下可见光波段的水体衰减系数c≈3.20 m-1;估计,可得水下偏振度修正因子χ为0.913 8,故修正后的信息光偏振度ρT为0.681 1。考虑到本文模型仅适用于处理被太阳耀光遮掩的水体表面,因此对强度图像过曝部分创建耀光掩膜;耀光掩膜区域应用本文第2节所述的算法流程进行处理;非耀光掩膜区域保留最小光强图像Imin中对应的像素点;对融合图像采用对比度受限的自适应直方图均衡化方法。
户外波动水面太阳耀光遮掩下的水下潜艇场景如图6所示。图6(a)为强度图像及其直方图和累积百分比,可见其强度图像的饱和像素点占比达到26%,遥控潜艇完全被太阳耀光覆盖;图6(b)为90°偏振图像及其直方图和累积百分比,尽管偏振滤光方式可消除场景中大部分区域的太阳耀光,仍难以识别检测水下遥控潜艇目标,其中80%的图像像素灰度值小于30;图6(c)为耀光抑制图像及其直方图和累积百分比,可见耀光抑制图像能显著消除水面耀光,并克服偏振滤光模式固有的场景辐射能量损失难题,有效增强目标纹理特征和区域细节信息。
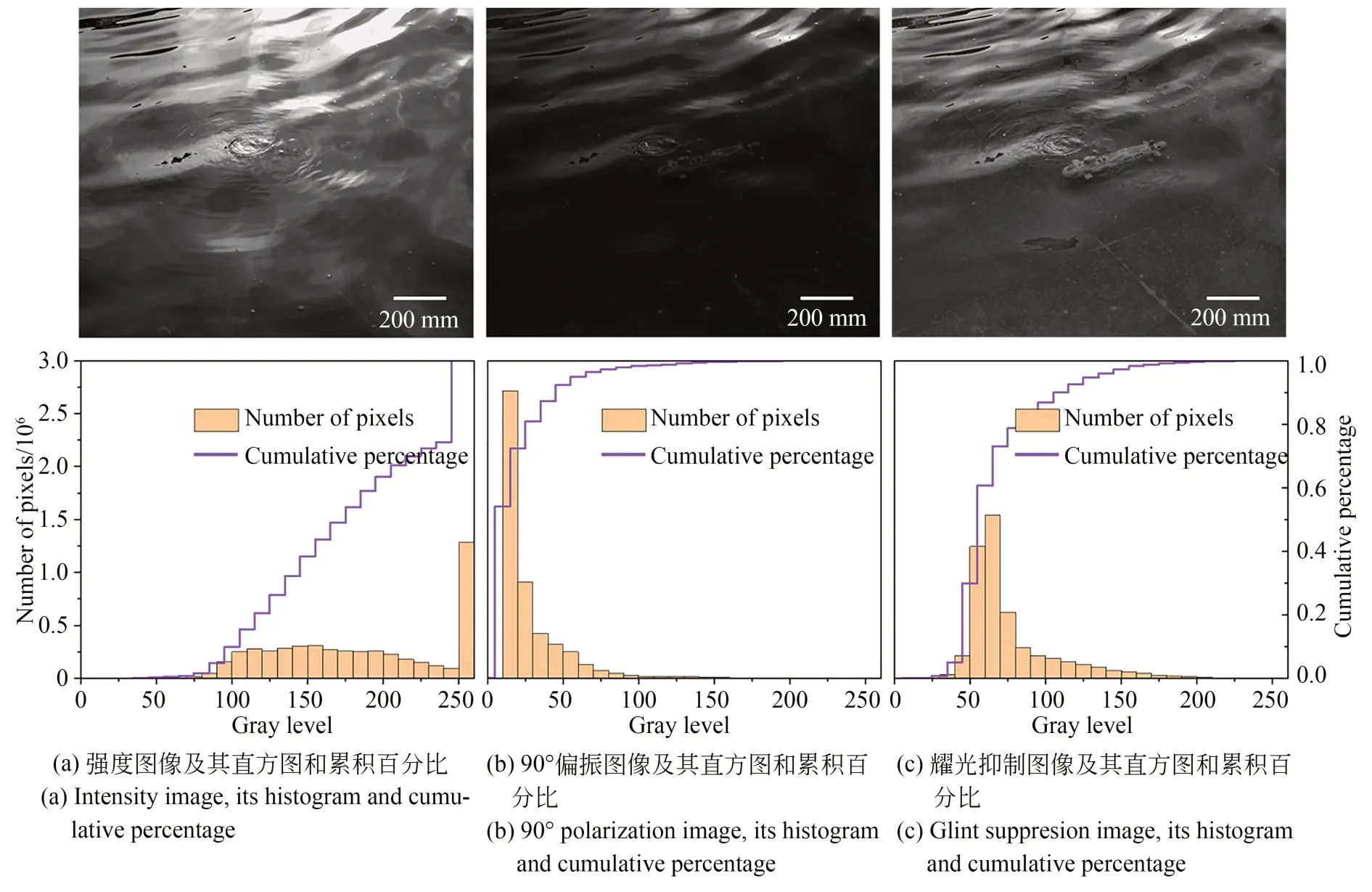
图6 户外波动水面太阳耀光遮掩水下潜艇场景Fig.6 Outdoor scenes of submarine under glint-contaminated waves
3.2 图像质量评价
为定量评估太阳耀光抑制算法的有效性,采用区域对比度和图像信噪比指标对图像质量进行评价。区域对比度C描述图像目标区域和耀光区域像素平均值的对比程度,图像信噪比R衡量图像中目标信号与背景噪声之间的强度关系,其大小与目标的显著性水平呈正相关关系,即:
式中:μT为目标区域的平均像素值;μG为耀光区域的平均像素值;σG为耀光区域的像素值标准差。室内平静水面场景、室内波动水面场景和户外波动水面场景下选取的目标区域和耀光区域如图7所示。
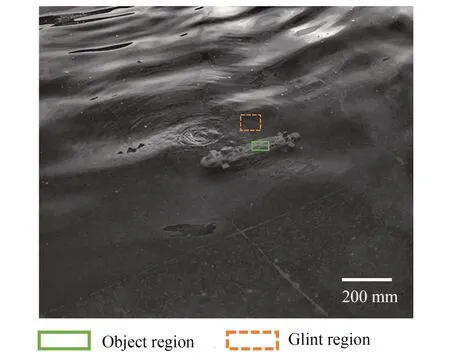
图7 目标区域和耀光区域的选取Fig. 7 Selection of object region and glint region
户外场景图像的区域对比度和图像信噪比如表1所示。对于户外真实波动水面场景,耀光抑制图像的区域对比度相较于强度图像和90°偏振图像分别提升1 100.7%和25.3%,图像信噪比相较90°偏振图像提升78.4%。需要注意的是,户外真实场景强度图像的信噪比为负数,说明该图像信号强度弱于杂波强度。
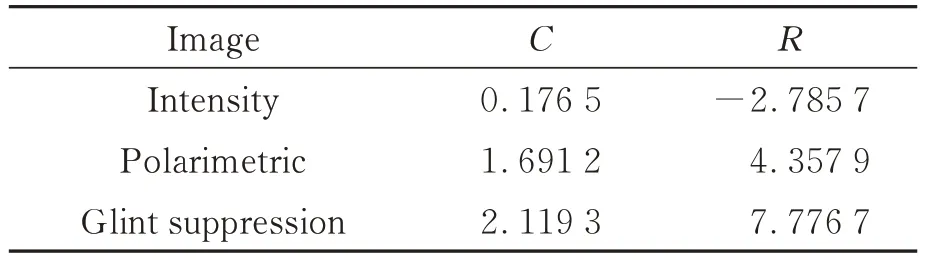
表1 户外场景图像的区域对比度和图像信噪比Tab.1 Region contrast and image SNR of outdoor real scene(dB)
由实验结果可知,本文提出的耀光抑制算法相较于强度成像和偏振滤光等直接成像方式具有更好的耀光抑制特性。然而,抑制图像中仍残留部分耀光像素,这是由于太阳耀光偏振度和水下目标信息光偏振度均是空域变化量,如图8(a)所示,与算法中两者偏振度全局一致的假定存在偏差,因此无法消除理论预测偏振度与实际偏振度偏差较大的像素点耀光。此外,实际实验天气状况为多云转晴,无法忽略具有偏振特性的大气散射光,难以满足第2节太阳耀光抑制模型中光源无偏假定的理想情况。
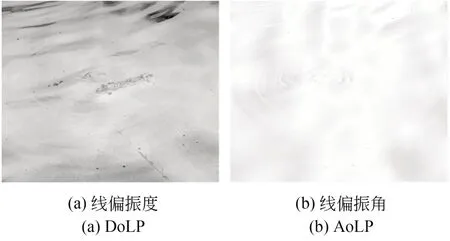
图8 户外波动水面场景的线偏振度和线偏振角图像Fig.8 DoLP and AoLP images of outdoor scenes of submarine under glint-contaminated wavy water surface
在物理模型推导过程中,假定水下目标信息光和太阳耀光的偏振方位一致,从户外场景的偏振角图8(b)中可以看出,该假定基本符合实际情况。
4 结 论
为解决传统机载遥感探测方式因受太阳耀光干扰而丢失水下目标关键信息的难题,本文根据水面反射太阳耀光和透射目标信息光的偏振传输特性建立太阳耀光抑制物理模型,选取非饱和偏振图像解算最大和最小光强图像,基于穆勒矩阵形式的太阳耀光归一化反射率求解耀光的偏振态空间分布,提出光源-水下目标-探测器偏振态传输模型,求解水下透射目标信息光的偏振度,并根据被动水下成像物理模型,引入水体衰减系数进行偏振度修正。户外实验结果表明,耀光抑制图像相较于90°偏振图像的区域对比度提升25.3%,图像信噪比提升78.4%,可有效抑制太阳耀光,突显水下目标物体,当太阳耀光偏振度远大于目标信息光偏振度时,本文方法的效果较佳。因此在实际遥感探测的过程中,建议调整遥感器姿态使观测天顶角和太阳天顶角之和为106°[29]。
尽管所提水面反射太阳耀光抑制方法在绝大多数场景中都有成效,但物理模型中光源仅考虑无偏直射太阳光,这与实际情况不符,尤其是在清晨、傍晚或多云天气,太阳直射光受大气粒子瑞利散射的影响,其偏振特性不能忽略;且实际海洋环境更为复杂,需考虑水体粒子对偏振光的前向散射效应。近年来,基于大气矢量辐射传输模型的天空光偏振特性[30-31]和水下偏振光传输模型[32-33]的研究为本文算法的优化提供了思路。在未来,为适应环境复杂时变、信息流庞大的智慧海洋场景,还需精准度更高、适应性更强的太阳耀光抑制方法。