智能避障小车的设计与开发
2023-08-28穆怀辉王瑞红
姚 庆 ,穆怀辉 ,王瑞红
(黄河交通学院,河南 焦作 454950)
随着人工智能技术的飞速发展与广泛应用,智能避障车的作用日益突出。智能小车是一类具有感知外界环境、选择最佳路径、智能规避障碍等能力的智能机器人[1]。它利用红外传感器、超声波传感器等,对前方的障碍物进行实时检测,实现智能避障,并可以在未知的路径上进行自动驾驶,它不但能用于人们的日常生活,而且在工业和军事领域有着广阔的市场前景。本研究的目的是为智能小车的设计与发展提供一种新的思路与方法,使之能够更好地服务于人们的日常生活,提升人们的生活品质。
1 智能避障小车的总体设计
在整个智能小车系统的整体设计[2-3]中,分为了两大板块进行,为小车硬件部分设计和软件部分设计。本研究所设计的智能小车具有红外避障、红外循迹、红外遥控、太阳能充电等多种功能。为了方便日后的更新和后续升级,在具体设计过程中做到不同模块之间相对独立。
1)电源模块:主要由两节蓄电池配合太阳能板块来保证电能供给,电池容量匹配智能小车完成工作需要。
2)单片机控制模块:作为控制系统的核心,主要担当的角色和VCU 类似,对传感器传来的信息进行采集和处理,使各功能模块完成指定的任务。
3)电机驱动模块:由两个电机来配合单片机系统和驱动芯片实现小车的正常驱动。
4)红外检测模块(包括避障、循迹和遥控):由红外光电传感器组成,按不同功能对小车运动过程中遇到的感应物做出反应,然后传送信号给控制模块处理。
5)太阳能板模块:它由一块太阳能板和一个双向开关组成,开关控制两种模式(放电和充电模式),实现脱离传统蓄电池充电驱动模式。
2 智能小车硬件系统设计
2.1 电源模块设计
本研究所设计的智能型小车,包含两大主要消耗电能的部分:一是控制回路,二是驱动回路。主控制部分所需电源为3.3 V,而电机驱动芯片L293D 的工作电压为5 V。所以,可以选用5 V 为主要电源,再加上变换晶片7805,就可以得到+3.3 V的输出电压。
在供电方面,本设计采用了两节14500 型号的3.7 V 的可充电锂电池,所以能从锂电池中直接获得+7.4 V 的电压。在+7.4 V 到+5 V 之间,最常用的变换晶片是7805,经过电压稳定得到各系统所需电压,并用7965开关来控制电源的开关。
2.2 单片机控制模块选型设计
控制系统是移动机器人的核心部件之一,它的主要工作就是在复杂的环境下,把事先设置好的方案和指令转化成所需的机械运动,从而达到特定运动的目的。因此,其控制效果的好坏,不仅关系到整个机器人的动作精度,而且关系到其是否能够达到预定的目标,而且关系到其灵巧性与可靠性[4]。综合考虑了系统的硬件性能及成本等方面的原因,本研究选用意法半导体公司生产的一款具有良好性价比的32 位微控制器STM32F103,并将其应用于智能小车的控制中。
控制系统采用了高性能ARM 芯片Cortex-M3,32 位RISC 芯片,保证了系统的稳定性。其工作频率最高可达到72 MHz,并配有一个嵌套的向量干扰控制器,使干扰反应更迅速。另外,它还具有512 KB的快闪记忆体,64 B 的SRAM 记忆体,多个增强的输入输出埠,并具有配置功能,可与两个APB 总线相连。本设计采用了三种不同的低功率工作方式,并且采用了灵活的时钟控制方式,能够很好地满足系统的需要。其工作电压在2.0 V~3.6 V 之间,当电源电压为3.3 V 时,耗电只有1.44 A。
2.3 电机驱动模块设计
PWM(Pulse Width Modulation)技术的特点之一就是将主控器与被控器之间的信号以数字方式传递给被控器,从而避免了对被控器进行DAC 转换的过程。该算法能保证信号的数字化,并能将系统噪声降到最低。通过一个循环中高电平的变化,可以使信号占空因数发生变化。接通间隔高电平维持得愈久,对应的占空因数愈大。调节占空比可以实现不同电压的输出,实现对电机转速的调节。
2.4 红外避障模块设计
红外避障电路如图1 所示,其中结构上由V7 红外发射二极管和V4 接收管组成避障红外传感器探测部分,再结合上电压比较器LM393 根据相应指令和控制系统传达的信息来完成相应的避障工作,另外各并联电路选取相应的色环电阻来分配电压以保证电路稳定。其原理为:由发射二极管V7 发出的红外线与障碍物发生碰撞反射,红外线被反射,光敏管V4接收红外线,其中3 针输出高电平,并且2 针电压U2低于3 针电压U3,然后由1 针输出低电平,将电平信号传输到控制系统和电机驱动芯片处理,完成后续报警并后退避障操作[5]。经过反复测试,本设计小车的避障距离为10 cm~20 cm。
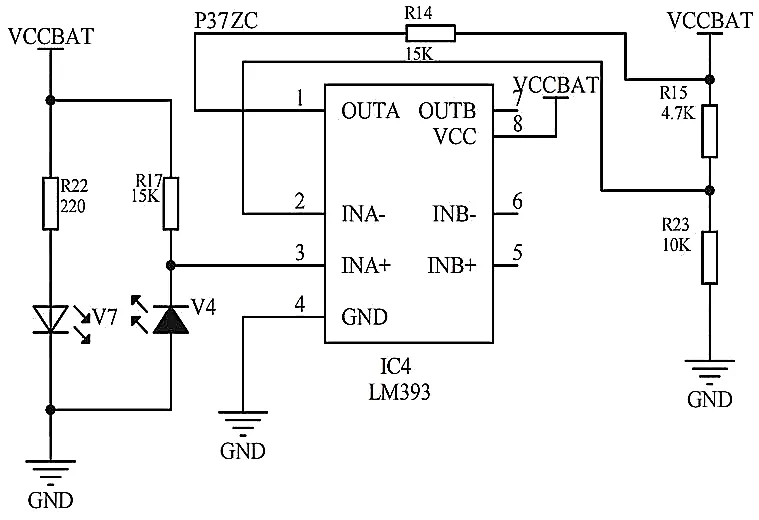
图1 红外避障电路
2.5 红外循迹模块设计
红外循迹回路与红外避障回路的工作原理相似,但两者的侧重点有所不同。避障电路主要是探测是否有被反射的光线,从而判断出是否有障碍物,而循迹电路则是着重研究了黑色和白色两种不同颜色的物质对光线的吸收和反射能力的差别。在红外线循迹模式下,根据黑、白两种材料的吸光性能差异,设计了红外线循迹装置。该设计使用左右轮独立的两套循迹模组,两套循迹模组的具体设计结构电路图如图2所示。
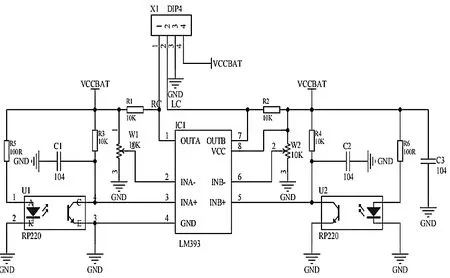
图2 循迹电路图
循迹电路的工作原理是:当电路连接电源后,由左边的红外线二极管发出红外线,当光线与黑线相遇时,大多数红外线会被黑线吸收,只有很少一部分会被反射回去。红外线发射二极管右边的红外线接收光敏三极管因为收到的光太少而不能正常工作,光敏三极管的C 端和E 端都是高阻状态,并且和电阻R3形成了一个电压回路[6]。将该分压电压与该电压比较器LM393 的2 针电压相比较,且2 针电压U2 低于3 针电压U3 时,最终由1 针输出高电平传输到控制系统和电机驱动系统来完成循迹工作,做到始终沿黑线行驶。
正常表面的光被反射后,红外线光敏三极管吸收了许多光,导通压降很小。结果2 针上的电压U2 比3 针的电压U3 高,最后,LM393 的1 针就会输出一个低电平然后正常行驶。直到前面有黑线时,可以通过探测1 针的电平水平来判定。由于小车的循迹误差取决于小车的大小(两个循迹传感器的距离)、循迹传感器的灵敏度和黑线的粗细等,本款小车的探测灵敏度的设置可以达到左右轮其中一个轮碰到黑线就会自动矫正,可允许偏移距离约5 cm,偏航后则自动矫正并巡线行驶完成循迹工作。
3 智能小车软件系统设计
本系统选择使用Keil MDK 作为开发工具,Keil MDK 是ARM 嵌入式开发的主流工具之一,也是目前为数不多的完全支持Cortex-M3 处理器开发的工具之一。若想要实现本设计的主要三大功能必须有一套精准的编码。
3.1 红外避障系统程序设计
在本次设计中,小车行驶时,单片机会先分析红外传感器发送的信号,以判断前方是否有障碍物。如果红外传感器发射的红外线被反射并接收到,则会认为前方有障碍物,从而进行相应的避障操作[7]。具体来说,若前方存在障碍物,小车会停下来报警后退并执行右转避障,直到检测到无障碍物后才停止右转并继续执行后续操作,以完成相应的任务。避障计算程序如图3所示。
图3 避障计算程序
3.2 红外循迹系统程序设计
该系统的设计思路是:在启动车辆的情况下,首先对跟踪模块进行初始化,然后通过红外线感应器来探测车辆的正前方有无黑线。若小车在黑线左边偏了一点,那就往右边偏,再往前走;若小车偏离黑线右边,先向左拐,再向前行驶。循迹计算程序如图4所示。
图4 循迹计算程序
4 智能小车焊制与调试
4.1 小车的焊制
本款小车分为三部分焊接,分别为小车底板、单片机控制板和电力驱动转接板[8]。
1)首先进行小车底板的焊制,小车底板主要包括避障和循迹板块。中间固定电池槽,然后底部固定两个电机和轮胎。
2)转接板部分主要包括电力驱动系统的一些色环电阻、遥控板块、稳压芯片、驱动芯片和蜂鸣器等部件,还有电源部分的插接头。
3)最后就是把三部分利用螺钉固定连接起来,并加装上太阳能板模块。
焊接过程中需要注意安全并避免脱焊等问题的出现。等到焊接工作完成,小车初步模型已经设计完毕,下一步进行编码的烧录,先在PC 端下载好Keil开发软件和Fly 烧录软件,完善好编码后进行小车与PC端连接烧录。
4.2 小车的调试
1)红外避障调试。调试工作流程:打开小车电源,调到避障模式,放入事先制作好的含有障碍物的环境中,当障碍物在小车前方10 cm~20 cm,小车报警倒退,实施右拐避障。以此类推直至小车走出障碍环境,完成避障工作[9]。
2)红外循迹调试。循迹功能如图5 所示,调试工作流程:打开小车电源,调到循迹模式,放入事先制作好的带有黑线的循迹环境中,小车能够在环境中沿着黑线稳定行驶,如有发现识别灵敏度低的状况,可以调节小车底部循迹板块的灵敏调节按钮,直到达到准确完成循迹工作的要求。
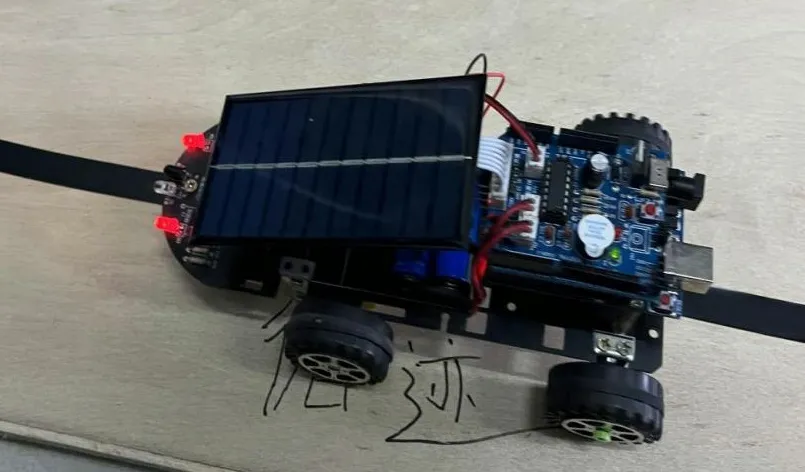
图5 循迹功能
3)红外遥控调试。调试工作流程:打开小车电源,调到遥控模式,将小车放在地面上,用制作好的红外遥控器向其发送指令,由小车后端的红外接收端接收信号,传输至控制决策系统进行分析,最后控制小车完成前进、左右转向、后退等操作[10]。
5 结语
随着智能车辆行业及计算机技术的快速发展,日常生活及工业生产正在向智能化方向发展,外加新能源汽车的爆火,本设计是一种不需人为管理的智能设备,符合可持续发展的理念,能够适应各种不同环境,克服磁场、温度、湿度等因素的影响,在人类无法生存或者无法进入的环境下仍然可以很好地完成运输、勘测、救援等方面的非常任务。并在各种实况模拟条件下进行模拟调试优化,确保了本设计各功能的可行性。
