落地抱杆垂直度动态跟踪告警及修正技术分析
2023-08-28姜斌
姜 斌
(国网重庆市电力公司建设分公司(监理公司),重庆 400000)
落地抱杆垂直度检测采用三维激光扫描技术,有助于提高检测方法的可靠性,需要从垂直度指标角度展开控制,保证抱杆检测过程能够顺利进行。落地抱杆垂直度检测应掌握检测原理,通过原理来掌握检测中的细节,获得精准的落地抱杆点云数据,对抱杆垂直度情况进行拟合,确保垂直度分析结果的准确性,提高动态跟踪告警及修正技术的应用效果。
1 落地抱杆垂直度动态跟踪告警技术
1.1 三维激光扫描技术
落地抱杆垂直度检测需要借助专业化的仪器,采用三维激光扫描仪可实现检测过程,得到精准性较高的检测数据,便于对垂直度情况进行动态跟踪。落地抱杆垂直度在安装过程中进行调整,需要采用动态跟踪的方式,及时对垂直度偏差进行告警,逐步对偏差情况进行调节。三维激光扫描仪属于非接触性仪器,内置有扫描观测系统,能够对抱杆的空间数据进行采集,通过点、线、面构建空间模型,基于轮廓分析落地抱杆垂直度情况,提高抱杆垂直度精准检验效果。动态跟踪告警依赖激光扫描系统的支持,操作形式上分为机载型、手持型、地面型,根据检测对象的要求进行选择。三维激光扫描仪通过坐标对落地抱杆空间数据进行识别,内置有自身坐标系统,使坐标具有相对的参考点[1]。激光扫描仪距离落地抱杆距离为S(m),横向扫描角度为α,纵向扫描角度为θ,激光发射位置为空间坐标原点,则三维激落光脚点坐标P 表示如下
1.2 点云数据采集与处理
通过三维激光扫描可获得落地抱杆的点云数据,需要确保采集方法的规范性,得到精准的三维激光落脚垫坐标,通过坐标形成扫描面模型。激光扫描仪内部自带Cyclone 软件,用于对点云数据进行保存,建立各个点为坐标之间的联系,实现对落地抱杆点云数据的处理。通过点云数据可拟合出中心轴直线,对落地抱杆的垂直情况进行判断,为垂直度的拟合控制提供参考。受到检测环境的影响,点云数据存在噪点的情况,容易造成误差的累积,将凹陷点云进行删除和校正,进而得到完整的点云图像。落地抱杆中心轴线是一条空间直线,以点云数据采集得到的轮廓点为依据,采用最小二乘法拟合出中心轴心的关键点坐标,通过空间直线标准方程可拟合出中心轴直线,具体表示如下
1.3 落地抱杆点云骨架
落地抱杆最终应形成点云骨架的形式,将点云分成基本单元面,便于通过平面方程展开分析,便于对点的变化趋势进行判断,提高垂直度分析的动态告警能力。将点云数据分成m×n 块,基本单元面中的点云命名为“点云ij”,以此来确定点云所在的位置。点云骨架是形成抱杆截面的关键,将点云拟合成平面图形进行处理。基本平面模型表示如下
平面方程的求取关键在于a、b、c 值,通常在联立方程中进行求解,基于实际点云数据得到相应的参数值。联立方程的通用表达形式如下
通过上述求解方式,可综合运用点云骨架的坐标点,为落地抱杆模型的确定提供依据,提高模型构建的精准程度,确保点云骨架空间坐标的利用率[2]。
1.4 点云骨架网的构建
落地抱杆模型最终以点云骨架网的方式进行展现,将骨架点坐标导入到编程软件中,将不同坐标点关联起来,用于对骨架变化趋势进行判断。点云骨架网需要注意拼接过程中的匹配度,对毛噪点、杂点、重复点进行完善,构建精准性较高的立体网状模型,便于掌握落地抱杆透视模型,基于三维空间角度进行分析。通过点云骨架模型可进行多角度观察,实现对骨架结构的精准分析,得到不同角度落地抱杆垂直度情况,有助于垂直度检测中的误差校正,降低偶然误差对检测结果的影响。对于存在垂直度问题的点云骨架,整体立面将会呈现为弯曲状,而且编程软件可自动给出分析结果,将骨架垂直度情况反映出来,通过点云骨架对落地抱杆垂直度进行验证,实现对落地抱杆垂直度的控制。
1.5 垂直度检测原理
落地抱杆垂直度分析需要把控检测原理,可为垂直度控制提供依据,提高垂直度控制的高效性。落地抱杆垂直度计算公式如下
式中:θ 为垂直度,°;S 为抱杆倾斜值,m;H 为抱杆顶部和底部的中心距离,m。垂直度检测围绕中心轴线展开分析,需要确保中心轴线的拟合状态,确保垂直度测量结果的准确性。通过垂直度检测可形成方向向量,在空间直角坐标系中,规定向上为Z 轴正方向,则满足垂直要求的方向向量表示如下
通过这种方式,可沿着垂直方向进行检验,对规定方向的垂直度进行对比,提高垂直度检测方法的可靠性,并且检测方法更易于实现。
中心轴线法检测步骤如下:第一,沿着Z 轴方向对点云进行裁剪,形成若干点云图像,对不同截面的中心点位置进行确定,判断中心轴线拟合后是否为正中心。第二,将每段点云投影成平面模型,按照垂直度控制要求,对平面方程系数进行预设,可采用如下配置形式
第三,确定点云图像的轮廓线,通过点云随机采样得到原始数据,对落地抱杆中心轴线进行拟合,实现轴线分布情况的有效控制。第四,通过直线相交法得到中心点的位置,将不同平面的中心点连接起来,得到中心点拟合的最终轴线。第五,对中心轴线的垂直度进行检测,得到夹角θ 或tanθ 值,对垂直度情况进行判断。其中,夹角θ 越接近于90°或tanθ 越接近于1,说明落地抱杆的垂直度越高[3]。
2 落地抱杆垂直度动态跟踪修正技术
2.1 准备工作
落地抱杆垂直度修正需要进行一定的准备工作,排除外界因素对修复过程的影响,保证动态跟踪修复的有序开展。落地抱杆地基应满足强度要求,防止地基出现沉降的情况,使地基能够承担起底座的重量。地基地耐力不能低于0.3 MPa,否则将会影响到对抱杆的承载力,导致抱杆无法进行规范使用,不利于垂直度方面的控制。地基环境需要进行加固处理,采用碎石对地基进行填充,提高地基的密实程度。落地抱杆底座规格为3.5 m×3.5 m,确保底座与地基稳定接触,防止修正过程中垂直度受到影响,防止底座在抱杆安装过程发生偏移。为了保证动态跟踪修正的精度控制效果,需要确保抱杆底座的稳定性,构建抱杆垂直度修正的前提条件。
2.2 分段修正
落地抱杆高度较高,可采用分段修正的方式,如每20~25 m 作为一个分段,逐步进行安装且做好校验工作,实现抱杆垂直度的严格控制。分段修正过程中,采用三维激光扫描仪进行检测,对抱杆垂直度情况进行检验,便于提出合理性的修正方法。落地抱杆垂直度存在着误差累积的情况,每个阶段修正后误差不能超过1%,否则随着抱杆安装过程的进行,倾斜情况将逐渐增大,不利于抱杆垂直度的控制。抱杆修正的难度较大,需要注重辅助抱杆的使用,将抱杆倒装架进行就位,通过两侧摇臂对垂直度情况进行调节,使分段修正处于易于调控的状态。抱杆修正过程应设置内拉线,对抱杆进行进一步的固定,确保抱杆整体的稳固性。抱杆组装过程中,初始挠度应控制在1%以下,内拉线垂直夹角不低于20°,对抱杆的重心位置进行加固,使抱杆能够得到有效固定[4]。
2.3 平衡受力
落地抱杆垂直度修正过程中,需要注重两侧的平衡受力,将抱杆受力控制在额定载荷下,使其处于受力平衡状态。通常情况下,抱杆平衡状态一般在垂直度为90°时,有着良好的受力作用,属于抱杆平衡控制的理想状态。平衡受力是垂直度修正的关键,通过受力控制对平衡度进行调节,使抱杆垂直度修正更具有实际意义。落地抱杆垂直度修正过程中,需要考虑到整体偏差的影响,一般第1 段和第2 段对偏差的影响较大,需要通过三维激光扫描进行分析,确保垂直度情况能够趋于平缓,将垂直度绝对差异控制在0.5‰以内。垂直度跟踪修正适合采用动态跟踪形式,便于将偏移量、高差、垂直度进行对比,对垂直度的变化趋势进行验证。在落地抱杆长度不变的情况下,偏移量和高差均会对垂直度造成影响,具体影响情况可根据勾股定理展开分析。
式中:L 为抱杆长度,m;ΔX 为偏移量,m;H 为高差,m。随着偏移量的增加,高差将会逐渐降低,垂直度将会逐渐减少,导致抱杆偏离垂直方向[5]。由此可见,落地抱杆垂直度修复关键为偏移量的调整,偏移量越接近于0,垂直度越接近于90°,抱杆的平衡受力情况将越稳定,进而实现抱杆垂直度的有效修正。
3 落地抱杆垂直度检测及修正实例分析
3.1 工程概况
以某铁塔抱杆项目为例,全高85.4 m,总重量152 t,需要对落地抱杆进行安装,使抱杆满足组装参数要求。落地抱杆施工采用先组装倒装架的方式,采用液压顶生方式将1 200 mm×1 200 mm 抱杆顶升至40 m,在四周设置4 条拉线,满足抱杆对受力的需求。落地抱杆不同工况参数情况见表1。
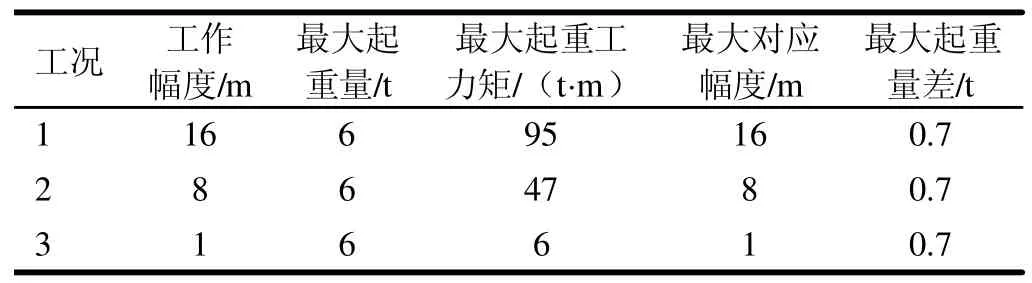
表1 落地抱杆工况参数表
3.2 检测思路
落地抱杆垂直度采用地面三维激光扫描仪进行检验,最大检测范围在90~300 m 之间,提高抱杆的精度控制水平。本工程采用Z+F5010C 三维激光检测仪,扫描精度为0.1 mm,满足本工程的检测要求。激光扫描仪主要参数见表2。通过扫描仪可对垂直度偏移量情况进行控制,本工程采用动态跟踪告警检测方式,组装过程中进行分段检测,确保偏差情况能够得到及时校正,防止抱杆施工产生连续偏差[6]。
3.3 垂直修正
落地抱杆注重高度范围的把控,不易采用整体检测方式,适合采用分段检测方式,便于对垂直度情况进行分析,确保垂直度修正方法的有效性。结合落地抱杆的高度情况,可将抱杆分成4 段展开检测,分别为0~25、25~50、50~75 和75~85.4 m,实现抱杆垂直度的分阶段校正。三维激光扫描测量结果见表3。由表3 中数据可知,各个阶段垂直度修正情况良好,落地抱杆有着垂直度方面的要求,分段校正方法发挥了主要作用,使落地抱杆处于相对垂直状态。

表3 三维激光扫描测量结果
3.4 中心轴线拟合
中心轴线拟合是分析落地抱杆整体垂直度情况的关键,经过激光三维扫描仪分析后,可得到拟合后的中心轴线方向向量,具体表示如下
可得到中心轴线与垂直方向的夹角θ=arctan(0.73×10-3),基于DL/T 319—2010《架空输电线路施工抱杆通用技术条件及试验方法》要求,需要将tanθ 控制在1/1 000 以内,使抱杆倾斜度控制能够满足要求。通过与标准对比可知,tanθ=0.73×10-3<1×10-3,说明落地抱杆的垂直度符合标准规定,杆塔抱杆项目达到合格范围标准。
3.5 操作注意事项
在操作过程中,为了充分发挥各项技术的效能,获取更加准确的结果,为施工控制工作提供更有价值的参考,应当确保各个技术环节操作的准确性,而操作者作为检测技术实施的主要操作者,专业水平和规范操作意识决定着垂直度检测的效果,因此,在检测操作过程中,需注重对操作者的培训,并提前做好检测操作安排,同时也要尽量委派操作经验丰富、规范意识较强的工作者进行实际的检测操作,降低人的因素对检测效果的影响,提高检测结果质量。此外,配套的设备作为检测工作开展的要素之一,其性能状态会在很大程度上对检测效果产生影响。所以,在检测工作开展过程中,应当注意,需提前做好设备的性能检测工作,并根据实际情况和需求做好设备调试,同时,也要严格按照现行的规范、规程进行设备的使用,以免对设备造成损坏,影响检测效果。在此过程中,也要注意优化设备的日常养护工作,并严格按照现行的规程进行设备的调试和保养,记录好设备的状态,同时,也要注意做好设备的故障预案,根据设备的现状和作业条件,提前编写好设备的故障应急处理方案,以便更好地控制设备因素对检测结果的影响。总体来说,在检测工作中,除了要重视技术方面的因素,也要关注人、设备方面的因素,提前设计检测工作方案,并结合实践经验,规避各类影响因素,以保证检测工作的效果,提升检测工作水平。为此,在检测工作方面,可以加强对事前准备、事中控制、事后总结工作的重视,并在检测之前做好预案,在检测操作时做好技术操作的规范管理,待检测完毕后,及时总结技术的落实情况,由此准确识别和优化技术操作中的不足,让垂直检测技术能够得到更好的发挥,持续提升检测结果对施工控制的参考价值,增强垂直度检测工作的落实效果。
4 结论
综上所述,落地抱杆垂直度检测非常必要,需要合理对检测方法进行应用,常用方法为三维激光扫描法,将垂直度检测系统应用其中,提高对抱杆垂直度的动态跟踪能力,针对垂直度不足的情况进行告警,实现垂直度检测的有效验证。垂直度检测为落地抱杆施工控制提供依据,结合当前的施工状态进行调整,对三维点云数据、多方位垂直度分析等技术进行应用,使垂直度判断具有良好的精度,形成高效化的抱杆垂直度跟踪方式,确保垂直度检测技术的应用水平。
