管道清洗机器人专利技术综述
2023-08-28李锐琴何健锋
李锐琴,何健锋
(1.四川省知识产权保护中心,成都 610041;2.国家知识产权局专利局专利审查协作四川中心,成都 610200)
20 世纪70 年代,石油、化工、天然气及核工业的迅速发展衍生了管道探测与维护的需求。在管道传输液体、气体的过程中,因温度、压力的变化及介质与管道之间的物理化学反应,常常会高温结焦,生成油垢、水垢,存留沉积物、腐蚀物等,有效传输管径减少,输送效率下降,能耗增加,还存在安全隐患。尽管通过添加化学剂、采用合理的工艺流程、采取水质处理等措施可以在一定程度上改善这些情况,但完全避免污垢的产生是不可能的。然而,这些管道大多埋设于地下或海底,人们无法直接到达或介入其安装环境,或管道的内径很小,人们无法进入、通过,或管道内部存在危险或毒害,易危及操作人员的安全。
管道机器人应运而生。管道机器人是一种可沿管道内壁行走的机械,其可以携带一种或多种传感器及操作装置,包括CCD 传感器、位置及姿态传感器、超声传感器、涡流传感器、管道清理装置、管道裂纹及管道接口焊接装置、防腐喷涂装置和简单的操作机械手等,操作人员可对其进行控制,从而完成一系列的管道检测和维护作业[1]。法国人J.Vertut 是探索管道机器人理论与样机研究的先锋,其于1978 年提出了轮腿式管内行走机构模型[2]。此后,日本、美国、韩国等国家充分利用前人的研究成果和现代技术,成功研发了多种结构的管道机器人。我国对于管道机器人的研发已有二十余年的历史,哈尔滨工业大学、中国科学院沈阳自动化研究所、上海交通大学、清华大学和浙江大学等高等学府及科研院所均在此领域有所建树。
1 管道清洗机器人概况
管道清洗机器人属于管道机器人的一个分支,其主要是对管道内部进行清扫、清淤、除尘和喷洒消毒液等操作,目前已被广泛应用于空调管道、输油输气管线、下水道等的清理中。通常而言,管道清洗机器人应包括行走部件、清洁部件、控制部件及检测、图像采集等辅助部件。此外,由于管道清洗机器人的工作环境是复杂、封闭的各种管道,包括水平直管、各角度弯管、斜坡管、垂直管及变径管接口等,其运行距离也较长[1],因此通常管道清洗机器人还有着适应管径以及通过弯道等功能的管道通过部件。
按照不同的行走方式,管道清洗机器人的行走部件可分为轮式、履带式、顶壁式及腿式等,分别适用于不同的作业环境[3]。轮式行走部件是最为常见的结构,机器人的前进、后退及转弯可通过调整两侧轴轮的运动方向和转速来实现。履带式行走部件属于轮式行走部件的扩展,履带本身起到给车轮连续铺路的作用,其支撑面积大,下陷度小,适合在松软或泥泞场地中作业。顶壁式行走部件是利用支脚结构顶住管壁,进而在管道内前进。腿式行走部件则是模仿人类行走,仅需要支腿与管道壁面以离散点接触即可前进,对各类环境的适应性较强[4]。
根据不同的作业环境以及清扫需求,管道清洗机器人可以搭载不同的清洁工具,常见的清洁工具包括毛刷、铲刀、吸尘管和喷嘴等。机器人可搭载单一的清洁工具,也可搭载多种清洁工具,例如在空调管道清洗作业中,机器人就常搭载毛刷、吸尘管以及喷嘴3 种清洁工具,首先利用毛刷将附着于管道内壁的灰尘扬起,再利用吸尘管将灰尘吸除,最后通过喷嘴喷洒消毒液,以防止病毒在空调管道内滋生。
管道清洗机器人的自动化智能化一直是技术研究热点,然而,目前对管道清洗机器人的控制仍以人工操控为主,主要包括有缆控制及无线控制。由于大部分需要清洁的管道为金属管,对电信号存在一定的屏蔽作用,因此采用无线控制方式时对发射信号的频率有较高要求。此外,无线控制方式需要机器人自身携带电源设备,这在一定程度上增加了机器人的载荷。有缆控制方式是采用电缆连接位于管道外的控制中心和管道内的清洗机器人,可向机器人传递控制信号并进行供电。但由于电缆与管壁存在摩擦阻力,机器人较难长距离作业,在多弯管道中更是受到较大限制。
此外,管道通过能力是衡量管道清洗机器人优劣的一个重要指标[5]。管道内作业情况复杂,管道清洗机器人易发生卡堵,尤其是在管径变化、弯管以及管接头的位置。因此,如何提升机器人在管道内的通过能力一直是各界的研究热点。目前通常是采用多模块化结构来设计管道清洗机器人,以提高其通过弯管的灵活度,并在机器人主体上搭载伸缩结构,以适应不同大小的管径,从而防止卡堵。
管道清洁机器人通常还搭载有检测、图像采集等辅助部件,以使管外操作人员准确掌握封闭管道内的情况。
2 技术发展状况
2.1 数据源与关键词
本文数据来源于incoPAT 专利信息平台,检索对象为公开日或公告日在2022 年6 月30 日前的发明和实用新型专利申请,检索关键词包括:管道、风管、下水道、清洗、清洁、清淤、除尘、机器人,pipe、duct、clean、dedust、robot。IPC 分 类 号 包 括(第8 版[2006.01]):B08B,F16L,B25J,E03F。
通过对检索所获得的该领域的专利申请进行统计与分析研究,对管道清洗机器人所涉及的技术进行分解,参见表1。
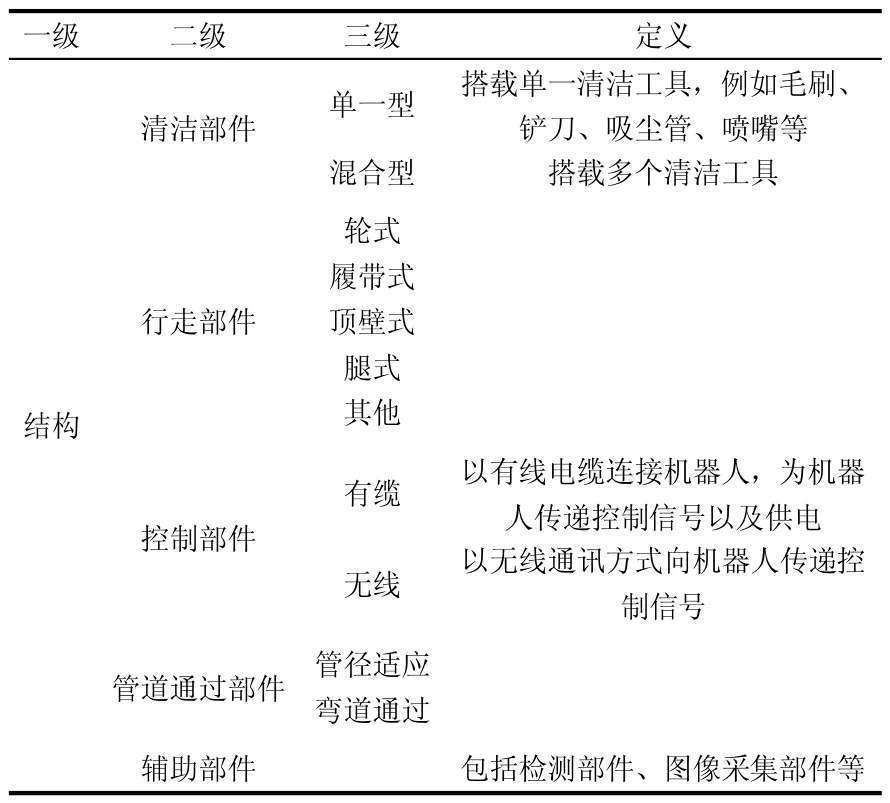
表1 技术分解及定义
2.2 对数据进行统计和分析
2.2.1 申请的地域分布
对管道清洗机器人专利申请的所在国家和地区产权组织分布进行统计,得到专利申请地域分布图,如图1 所示。从图1 中可以看出,中国、韩国和日本是申请大国,共同占据了所有专利申请的84%,可见东亚地区是管道清洗机器人最主要的技术市场,而其中,中国的申请量就占到了全球申请量的55%。此外,主要申请国还包括德国、美国、日本及法国。
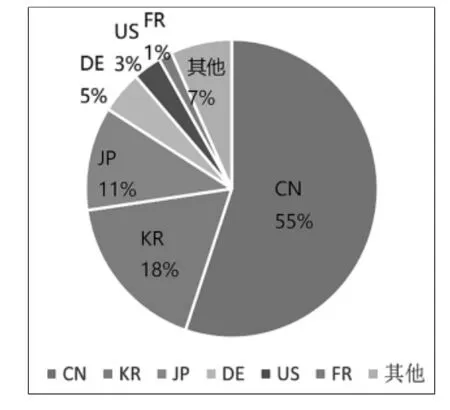
图1 申请量地域分布
2.2.2 核心专利
根据数据库中专利文献的被引频次数对本领域的专利申请进行排序,列举出被引频次数较高的专利申请。值得说明的是,由于早期申请被引频次较高,因此在筛选时引入了同年龄段专利文献的平均被引频次水平作为参照,旨在消除不同专利年龄带来的影响。此外,考虑到核心专利应在全球范围内均有一定影响力,因此在筛选中剔除了仅由本国引用的专利。得到前7项高频被引核心专利,参见表2。
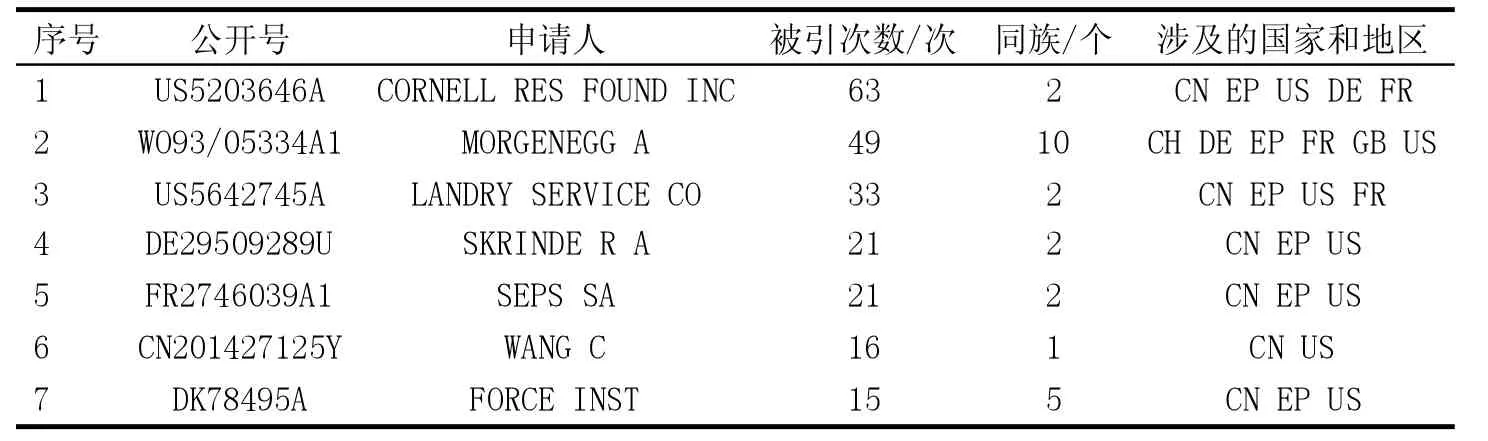
表2 前7 项高频被引核心专利
从表2 中可以看出,这7 篇被引频次最高的专利申请主要涉及到美国,德国、瑞士、法国等欧洲国家,中国以及世界知识产权组织。图2 对上述专利所涉及到的技术内容进行了简单的分析及梳理。从图2 中可以看出,核心专利的技术重点主要集中于弯道通过以及管径适应部件,仅有少量专利涉及到行走部件以及清洁工具。此外,有核心专利同时涉及到弯道通过及管径适应部件,可见该领域的研究热点是如何提高机器人的综合通过能力。
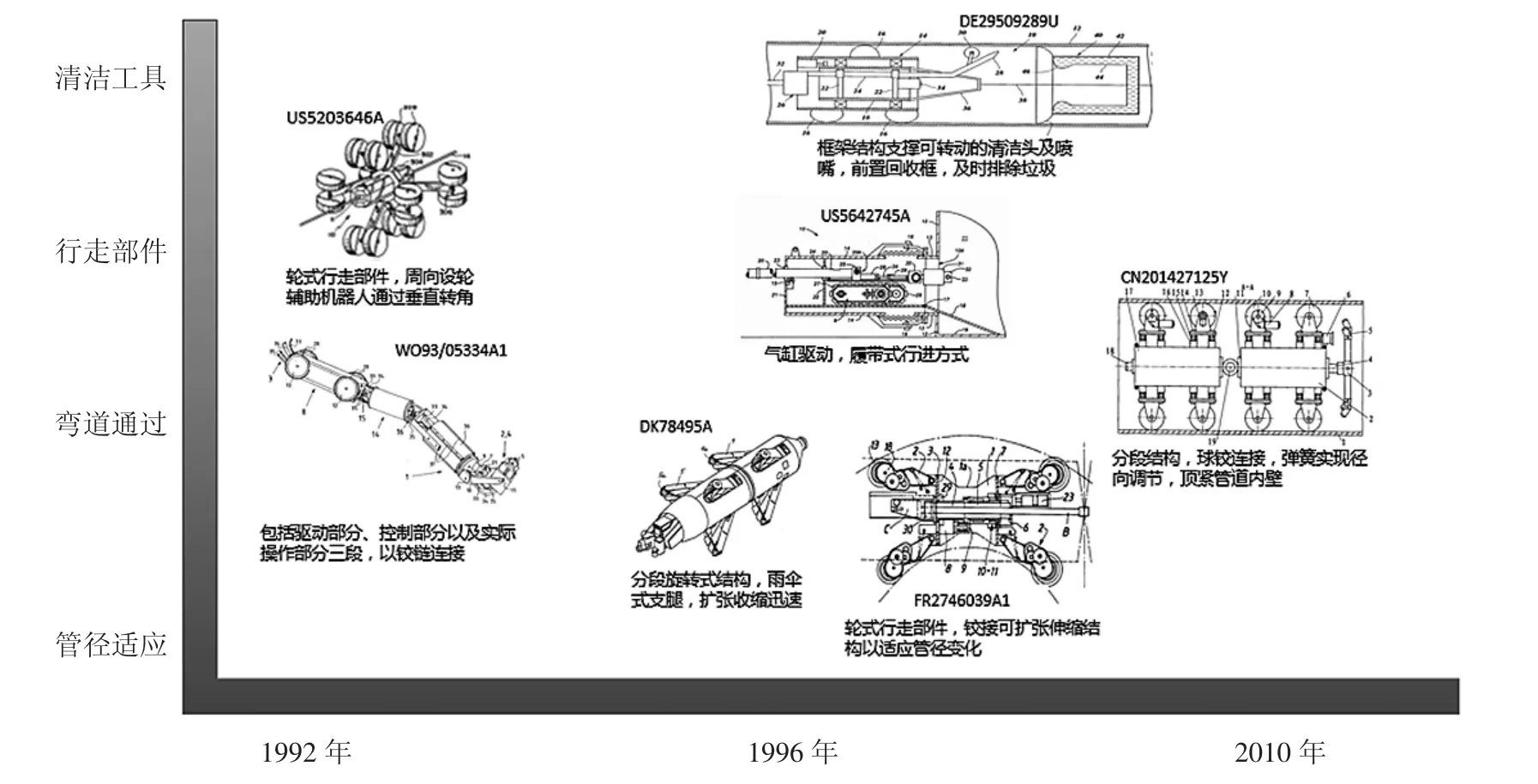
图2 核心专利图解
2.2.3 专利技术发展演进
通过对管道清洗机器人各个时期的专利文献进行梳理和分析,针对机器人结构中较为重要的行走部件、管径适应部件以及弯道通过部件等技术分支,得到相关的专利技术演进路线,如图3 所示。
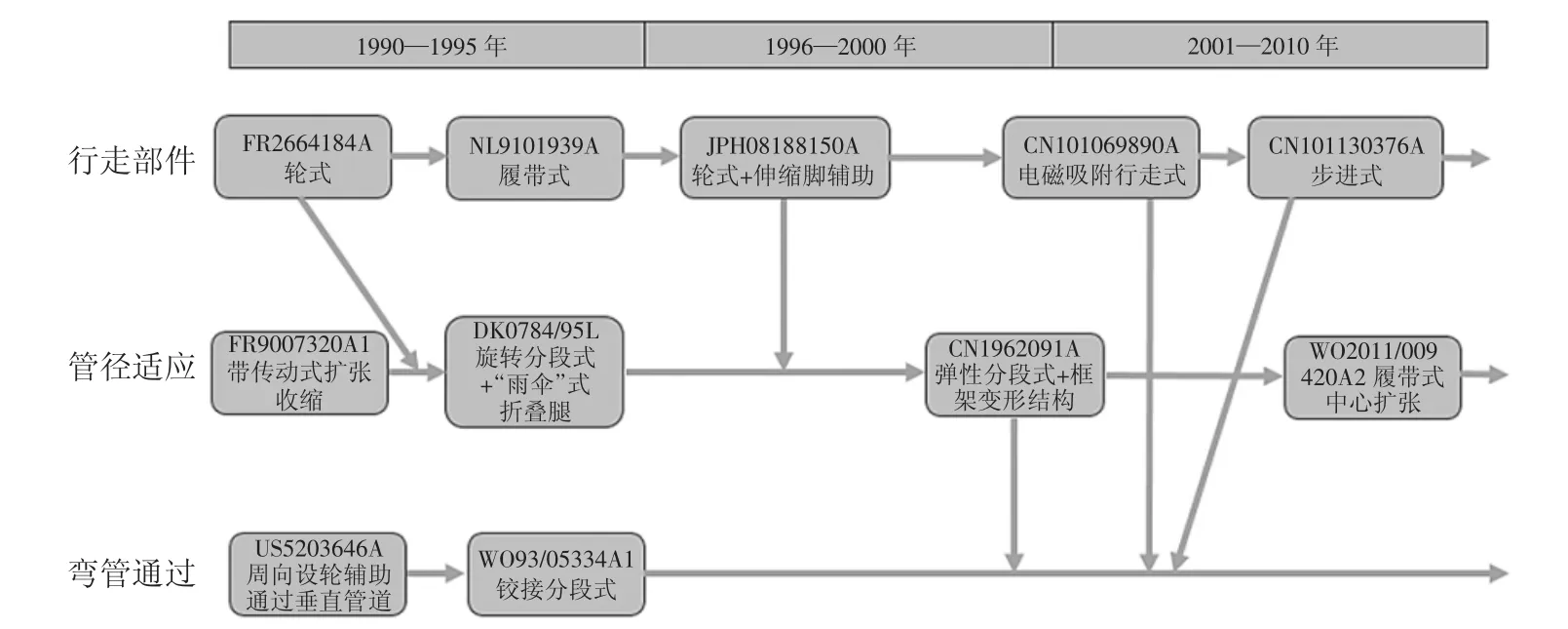
图3 管道清洗机器人技术演进图
从图3 中可以看出,1990—1995 年间,管道清洗机器人的行走部件、管径适应及弯道通过部件均有一定的发展。早期的管道清洗机器人的行走部件主要为轮式结构,同时,有研究者发现,在机器人的周向设置多个行走轮,有助于机器人通过垂直转角的管道。随后,在轮式结构的基础上衍化出了履带式结构,履带式结构的行进更为可靠,但缺乏轮式结构的灵活,因此较少在履带式结构的基础上开发管径适应以及弯道通过的相关部件。而早期的管径适应部件是通过同步带的形式对机器人的支脚进行扩张和收缩,其可靠性较低;之后出现了以“雨伞形式”扩张收缩的管径适应部件,在管径变小时能够迅速将支脚缩回主体,从而快速通过,同时,通过设置弹簧结构,使得在通过管径变小的部分后支脚能够快速回弹,紧贴管壁,从而保证了对管道的清洗效果。此外,在弯道通过部件上的重要发展是采用了铰接分段式结构,将清洁部件、驱动部件以及控制部件分模块铰接,该结构使得机器人自身在通过弯道时能够发生弯折,不仅大大增加了机器人的灵活度,还延长了机器人的使用寿命,当某个模块发生故障时,仅需对该模块进行替换。这种多模块化结构自出现以来一直被沿用,至今仍被认为是提高机器人弯道通过能力的重要手段。1996—2000 年是管道清洗机器人行走技术平稳发展的时间,这个时期的研究方向大多是对前期研究成果的组合和改进,例如出现了以轮式行走部件为主、伸缩脚为辅的行走结构,该种结构通过伸缩脚顶住管壁,提高了轮式结构的稳定性,同时也具备一定的管径适应能力。进入2000 年之后,出现了多种行走部件,例如电磁吸附行走式、步进式行走部件,对于管径适应的伸缩结构也有了进一步的改进,例如克服了履带式结构缺乏灵活度的缺点,以中心扩张的方式将履带式结构引入管径适应部件中,不仅适用于圆形管道,还可适用于方形管道。
总体来看,管道清洗机器人的行走部件、管径适应以及弯道通过部件均是机器人在管道内通行能力的体现,随着技术的进一步发展,各分支领域之间的研究也将出现更多的交叉。
3 典型技术方案分析
通常待清洗的管道距离较长,且存在许多弯管及管接头的部分,对于管道清洗机器人来说,如何通过管道弯折部分是长期存在的一个问题。
在未出现多模块结构之前,US5203646A 这篇专利公开了在机器人的周向设置多个行走轮的技术方案,有助于机器人通过垂直转角的管道,该项专利被引用多达63 次,可以说具有较高的影响力。图4 展示了该种机器人的整体结构,主要包括主体10、通过主体10中心轴线的电缆14 及套设于机器人主体10 外的法兰304,法兰304 延伸出4 对V 型支腿302,每一对V 型支腿302 有两个支脚306,每个支脚306 上设置有一对滚轮308。
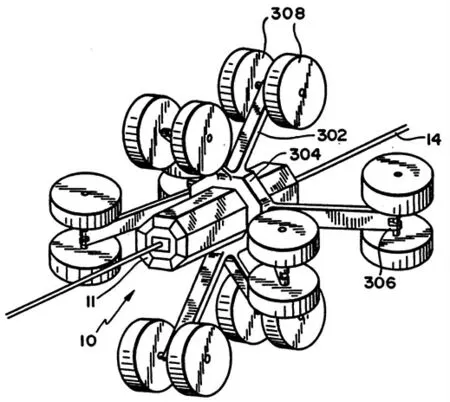
图4 周向设轮机器人
图5 展示了该机器人在通过弯管时的情况。从图5 中可以看出,依靠电缆14 的导引,机器人在通过管道的垂直转角时,只有滚轮308 与管道内壁接触,因此可以有效防止机器人主体10 被卡在转角处。此外,周向设轮的结构能够确保机器人主体10 无论相对于转角是何种角度均能顺利通过,大大提高了机器人的通过能力。
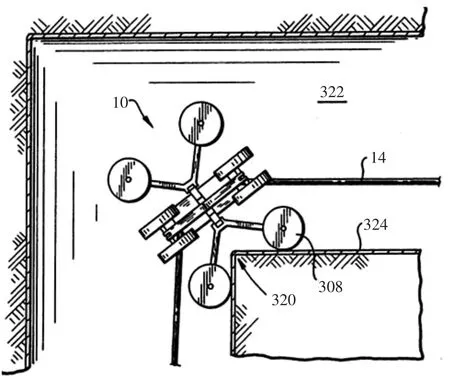
图5 机器人通过垂直转角管道
然而,周向设轮的机器人虽然能够通过弯道,但其本身灵活度较低,并且需要电缆进行辅助,通过能力还有待提高。WO93/05334A1 这篇专利提出了以多模块结构的形式来设计管道清洗机器人,从而赋予机器人较高的灵活度和自由度,机器人的弯道通过能力得到了极大的提高。图6 显示了该种机器人的整体结构,从图6 中可以看出,该机器人包括驱动部分8、控制部分14 以及机器人的实际操作部分1,三部分之间通过可枢转的铰链15、16 连接,因此这三部分具有较高的可变形性。驱动部分8 具有较大的推力或拉力,其安装4 个具有较高摩擦力的轮胎12,能够牢牢贴附于管道内湿滑的表面。电缆33、34 以及35 穿过驱动部分8 一直延伸至控制部分14,并连接到机器人的实际操作部分1。操作部分1 有一个主体36,该主体36 具有较大的质量,因为其需要平衡在对管壁进行作业时的反作用力,并且起到稳定整个操作部分1 的作用。从图6 中还可以看出,操作部分1 的前端还通过连杆10 以及铰接结构13 连接磨刀5,连杆和铰接结构进一步增加了机器人操作的自由度,扩大了磨刀5 的作业范围。这种分段铰链式的结构是多模块化结构的基础,如前所述,该种结构自出现以来一直被沿用,至今仍被认为是提高机器人弯道通过能力的重要手段。
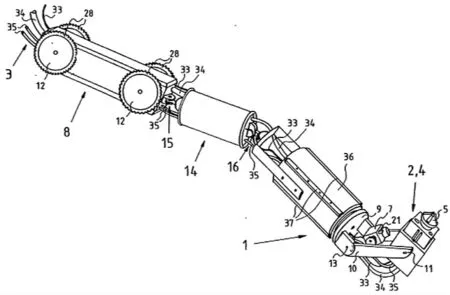
图6 分段铰链式机器人
如何适应管径大小也是管道清洗机器人常常面临的技术问题之一。专利CN1962091A 公开了一种带平行四杆机构的可变径管道清洗机器人,如图7 所示。可以看出,该机器人由前后2 节结构组成,前后2 节之间通过中心弹簧24 连接,具有较好的弯道通过能力。其中,单节结构包括由前摇杆4 和后摇杆18 构成的平行四杆机构,滚动轮1 安装于前摇杆4 的后端,在管道管径变小时,机器人与管壁通过滚动轮1 接触,摩擦力较小,有助于机器人快速通过;前摇杆4 的中部还安装有滚动小轮9,当遇到障碍时,前摇杆4 与障碍物接触,通过滚动小轮9 的过渡,机器人能够迅速越过障碍;前摇杆上还安装有扭簧5,其弹力使得前摇杆4 在越过障碍后能够径向张开,滚动轮1 再次贴紧管道内壁。此外,清洗头14 通过弹簧16 安装到前后摇杆之间的连杆13 上,在弹簧的弹力作用下,清洗头14 在磨损一定厚度后也能始终贴紧在管道内壁,提高长距离清洗作业效果。这种结构不仅能够快速适应管径,也具备较好的弯道通过能力,机器人在管道内的通行能力得到大幅度提高。
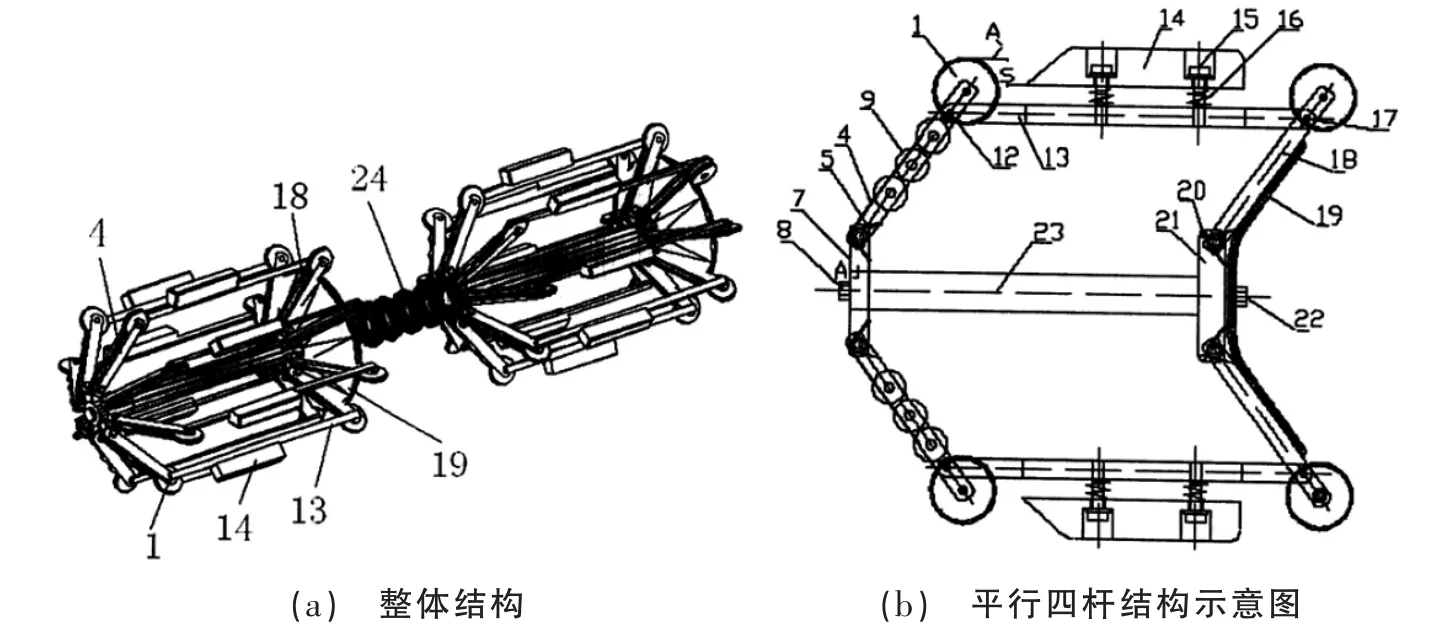
图7 带平行四杆机构的机器人
专利WO2011/009420A2 公开了以中心扩张形式来适应管径变化的管道清洗机器人。如图8 所示,该机器人包括主体1,主体1 的外部呈放射状设置有行走机构16,行走机构16 为履带式,通过连杆结构连接到主体1,在管径变化时,连杆结构以主体1 为中心呈放射状展开,并且履带结构相比轮式结构能够更为可靠地支撑于管道内壁上。
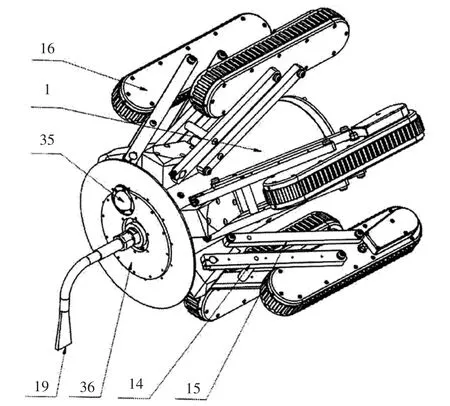
图8 履带式中心扩张机器人
当待清洗的管道的内径更大时,该机器人还可在连杆结构上续接延伸杆37,如图9 所示。延伸杆37 为多孔的空心结构,不会显著增加机器人的重量,并且能够保证机器人始终以一定力紧贴于管道内壁,提高了行走的可靠性。
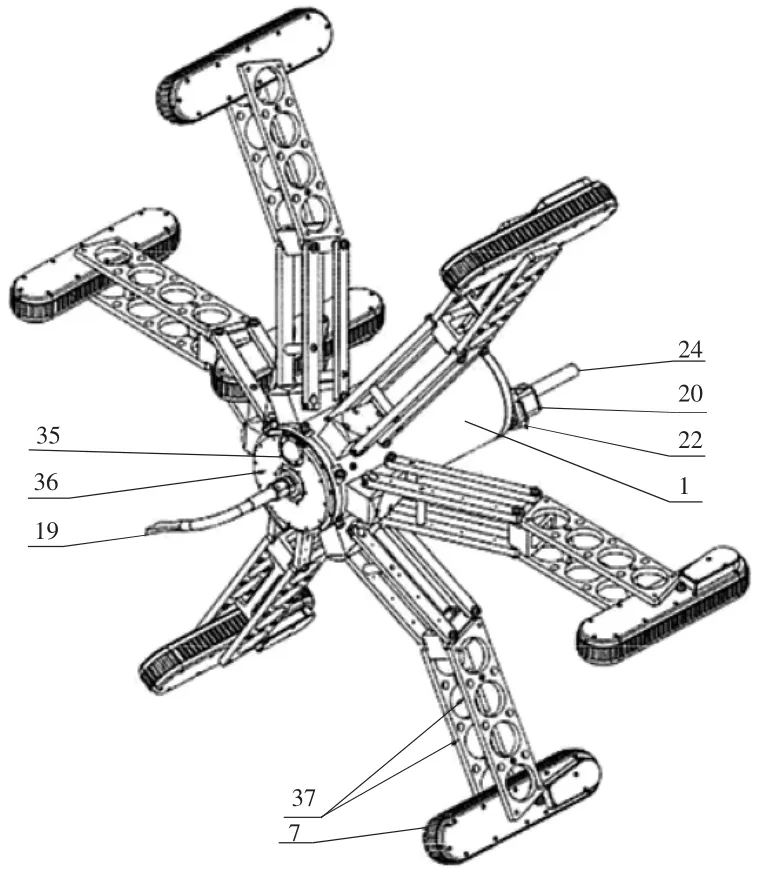
图9 带有延伸杆的机器人
当待清洗的管道为方管时,还可在机器人的行走机构16 上装备调整器31,如图10 所示。调整器31 具有一定角度的弯折,从而使得行走机构16 始终与管壁垂直,提高了机器人在方管内的行走可靠性。
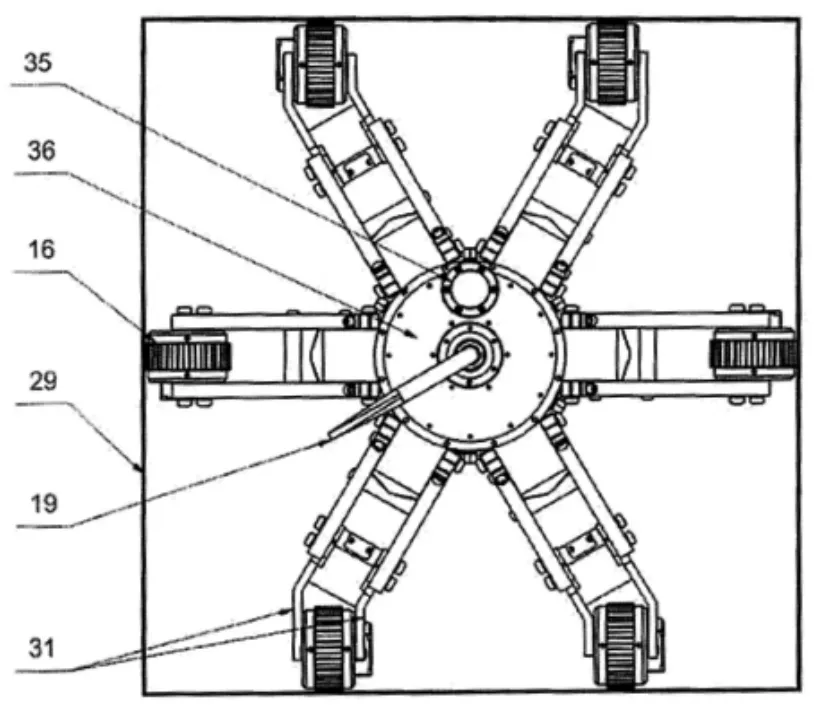
图10 带有调整器的机器人
此外,在面对竖直管道时,还要求机器人具备爬壁能力。专利CN101069890A 公开了一种用于中央空调管道式通风系统的清洁机器人。如图11 所示,该机器人的主体包括交叉形式的行走机构以及位于行走机构中心的以齿轮及传动带进行传动的清扫机构,其运动方式如图12 所示。
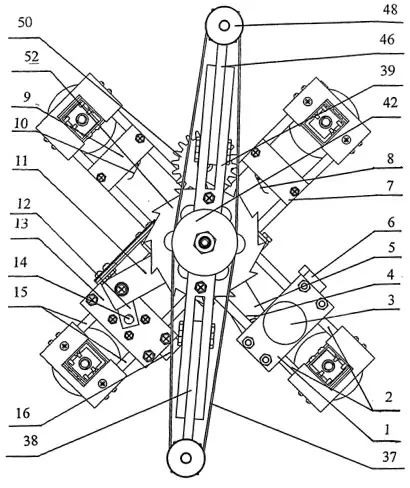
图11 电磁吸附行走式机器人
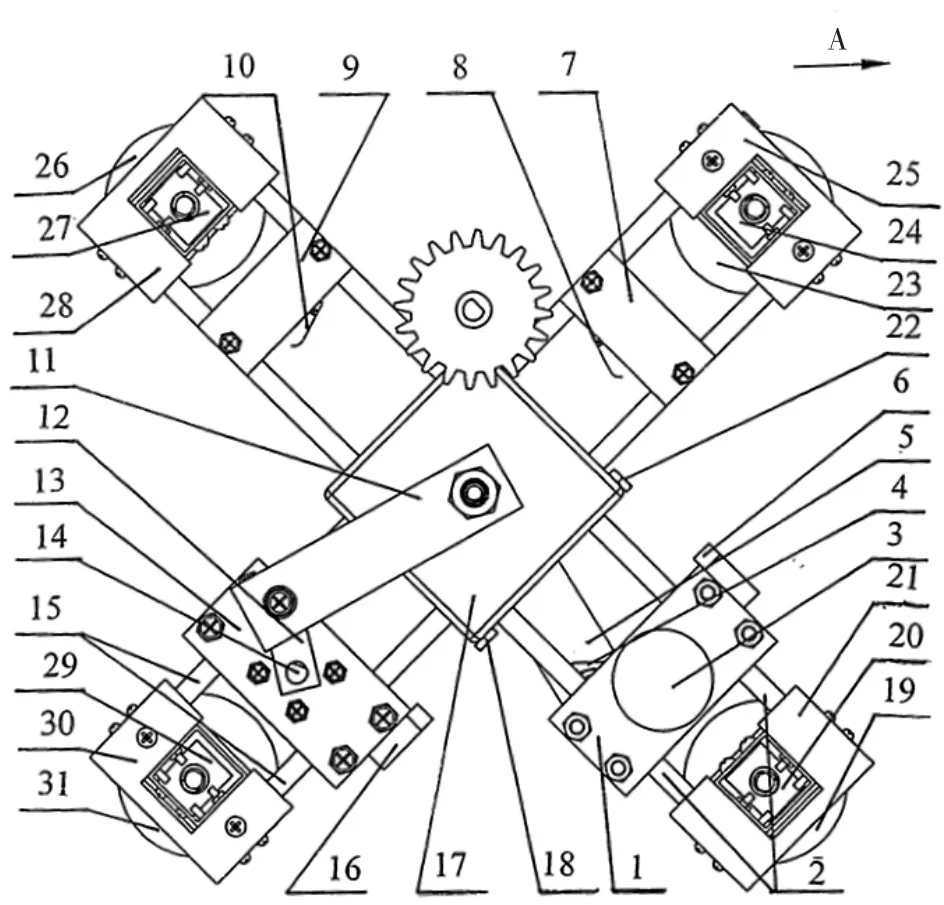
图12 电磁吸附行走式机器人的行走机构
当机器人吸附在管道内,需要向前行进时,电机3带动曲柄4,进而带动连杆5,使位于中心的滑块17 沿导杆组2 朝向限位开关座9 运动,电机14 带动曲柄12,进而带动连杆11,使滑块17 沿导杆组15 朝向限位开关座7 运动。此时,吸附电磁铁23 和31 不通电,具有磁性,因此吸附在管道内壁上,从而使得导杆组15 与其上的部件相对于壁面静止。吸附电磁铁19 和26 通电,不具有磁性,脱离壁面,导杆组2 与其上的部件相对壁面运动,而由于这2 个导杆组的运动相对垂直,因此机器人总体朝向图中的A 方向运动。同时,因为机器人的爬壁是利用了电磁吸附,当需要爬行竖直管道时,只需将行走电机3 和14 转角相差180°即可。该专利提出了利用电磁铁的吸附作用使机器人吸附在管道内壁行走,由2 对曲柄连杆机构带动滑块沿导轨进行的两向45°运动可以合成为沿水平或者竖直方向的运动,从而实现行走横管、竖管和躲避障碍的功能。
4 结束语
本文对管道清洗机器人专利技术进行分析和整理,梳理了管道清洗机器人的行走部件、管径适应部件及弯道通过部件等技术分支的技术演进,重点分析了本领域的典型技术方案。经分析,管道清洗机器人在专利中的核心技术主要集中于弯道通过以及管径适应,即如何提高机器人的综合通过能力;管道清洗机器人在弯道通过方面的技术演进主要以轮式结构作为基础,还衍生出了铰链式、多模块化的结构,在管径适应方面演进为中心扩张式的可收缩结构;管道清洗机器人如今在综合通过能力方面的发展已日益成熟。
