高压输电线路巡检无人机自动机场优化设计研究
2023-08-28李琪冉吕文超郭晨晨
李琪冉,潘 卓,吕文超,郭晨晨,王 伟,单 超
(国网冀北电力有限公司唐山供电公司,河北 唐山 063000)
随着社会和经济的不断发展,电网规模日益庞大,输电线路不断延伸,运行环境更加复杂多变,使得输电线路巡检任务更加艰巨[1-3]。为了更好完成日益复杂繁多的输电线路巡检任务,国家电网公司推出无人机和人工巡检相互协同的输电线路巡检新模式,以实现“机巡为主+人巡为辅”的协同巡检目标。这种通过“人工+无人机”的巡检方法,虽然效率上比传统人力攀爬杆塔检查与望远镜观察的巡检方式有所提升,但由于无人机飞行时长以及非常态化地形气候等限制,仍需要作业人员携带无人机到达现场,作业人员将在路程上花费大量时间,无法保障时效性,使得运维人员无法在短时间内查找并及时消除威胁电网运行安全的隐患,影响电网的可靠性与稳定性。因此,单一的“一人一机”无人机巡检模式已经无法满足精益化巡检要求,如何高效快速完成输电线路巡检任务是亟待解决的问题。巡检无人机自动机场的建立能够充分发挥无人机高空灵活且不受地形限制的优点,同时可使输电线路巡检方式的精益化和高效化得到广泛提升[4-8]。
目前,研究人员开展了无人机自动机场设计方法的研究。为了解决无人机在丘陵山地中电力巡检作业的适应性问题,文献[9]提出了搭建驻塔机场的技术方法,实现输电线路精细化自主巡检,然而对无人机驻塔自动机场的机械结构设计仅局限于尺寸参数和重量。文献[10]设计了一种能够自动更换电池的智能机场,对其起降平台、机械手和电池仓结构进行了机械设计,通过程序指令电机转动带动对应的机械手动作,使得无人机具备自主更换电池功能。文献[11]研究了无人机在自动机场中起飞和回收时舱盖和停机坪的运动过程,以舱盖打开时间和停机坪出舱时间的限制对电机转速进行计算与选择,但这种对电机选型的计算方法并不精确,同时也没有对关键承重结构件进行刚度校核。文献[12]提出了一种无人机自动起降机场的设计方法,包括对舱门闭合装置、停机坪装置、自动归中装置及自动充电装置等综合设计,实现了无人机在自动起降机场自主完成精准降落及充电维护。
本文提出的智能物联云计算平台架构图如图1所示。平台以MySQL和Hadoop为数据库基础,采用设计的双向控制调度方法实现智能电网中的各类应用,包括数据获取层、数据存储层、云计算层和最终应用层。
虽然研究人员取得了一定的阶段性成果,但是针对无人机自动机场机械设计方法的研究相对较少,同时缺乏对自动机场机械结构的应力分析。本文提出了一种关于无人机自动机场的优化设计方法,通过研究各个结构单元的运动过程及逻辑关系并对关键承重结构件进行强度及位移量校核,从而满足无人机存储、放飞、回收、换电和充电等一系列实际工作要求,确保无人机能够在野外环境中全天候开展输电线路巡检工作。
1 整体结构设计
自动机场整体结构主要由外壳单元、框架单元、W夹夹紧单元、机械手电池仓单元和举升单元等组成,整体结构如图1 和表1 所示。在自动机场接收到无人机降落信号后,外壳上盖在天窗单元带动下打开,举升单元的升降平台上升到指定位置,然后无人机便降落到停靠平台上,接着W 夹夹紧单元运动到工作位置将无人机推到指定位置,精夹持机构升起并夹紧飞机进行定位,之后开关机机构对无人机进行关机操作,举升单元整体下降到换电位置,自动机场上盖关闭,机械手单元将无人机电池取出并放入电池仓内,最后取出电池仓内电池放入飞机内。自动机场接收到无人机起飞信号后,其上盖打开,之后举升单元上升到起飞位置,同时开关机机构完成飞机开机,精夹持机构打开,最后飞机起飞,上盖关闭,从而完成整个流程。

表1 自动机场部件名称

图1 自动机场总体结构图
1.1 外壳单元
外壳单元主要由外壳主体及左右上盖构成,考虑到自动机场可能布置到沿海或湿度较大环境中,因此整体采用具有较强耐腐蚀能力的不锈钢材料。考虑到外部环境可能对设备零部件运行产生的影响,设备整体配备环控系统,可智能调节设备内部温度和湿度,保证自动机场内部稳定适宜的工作环境,该系统是自动机场能够适应各种复杂环境的可靠保障。此外,外壳整体设置保温棉,防止温度损失过快,上盖设置加热带(主要针对有冰雪天气发生的安装地点)用于将上盖开口位置的冰雪融化,防止冰雪将左右上盖冻住。
1.2 框架单元
框架单元作为整个设备的支撑结构,主要包括支撑框架、电控箱、充电箱、消防系统和电池逆变器系统等,其中支撑框架采用焊接型材配合组成,结构安全可靠、刚性好。
1.3 W 夹夹紧单元
W 夹夹紧单元主要包括停靠固定底板、W 夹归中杆、支撑框架、辅助平台、同步带及其驱动机构等,其结构如图2 和表2 所示。停靠固定底板采用强度高且质量轻的碳纤维材料,结构稳定可靠,对无人机的碰撞冲击小。W 夹归中杆由电机驱动的同步带对称传动,前后及左右归中杆对称布置。飞机初定位后,辅助平台向下翻转到垂直位置,防止飞机在下降过程中桨叶与停靠平台发生碰撞,可以最大限度减小自动机场整体尺寸。
Design-Expert软件程序对响应面试验结果进行二次回归响应面分析,4个因子经过拟合建立多元二次回归响应面回归模型。

表2 W 夹夹紧单元部件名称

图2 W 夹夹紧单元结构图
1.4 机械手电池仓单元
本项目的总体研究目标是拟研究一系列可适用于野外现场分析的快速、简单、高效的样品分离富集前处理技术与便携式钨丝电热原子吸收光谱仪联用,致力于提高该仪器的分析性能从而推动该仪器走向现场快速分析,同时进一步加强新型分离富集技术及其与钨丝电热原子吸收光谱法联用方面的理论和应用研究。

表3 机械手技术参数表
机械手电池仓单元主要由X 轴模组、Y 轴模组、Y轴加长模组、电池勾手和电池卡扣按钮等部分组成,结构如图3 和表4 所示。其中,X 轴模组、Y 轴模组由标准的滚珠丝杠线性模组构成,Y 轴加长模组采用滚珠丝杆传动,传动主要由滚珠丝杆、丝杠支撑座、电机和减速机等机构搭建而成。整体传动均采用滚珠丝杆传动方式,提高了机械手运行精度,并保证其结构稳定性。
表4 机械手电池仓单元部件名称
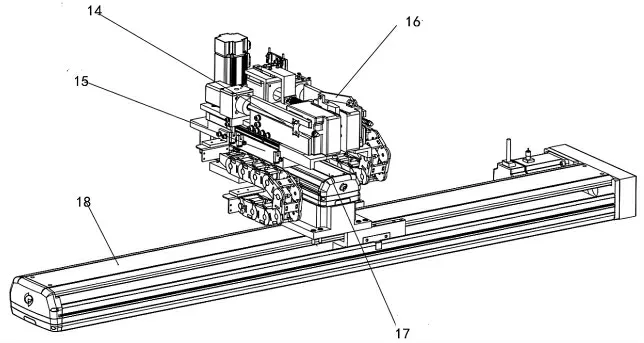
图3 机械手电池仓单元结构图
取电池时,首先X 轴模组、Y 轴模组及Y 轴加长模组进入工作位置,当电池勾手旋转到取电位置后,电池卡扣按钮按下无人机电池解锁按钮,无人机电池弹出,Y 轴加长模组向后运动将无人机电池取出。
自动机场内左右各设置1 个电池仓组合,由充电仓、加热器、风扇及支架等组成,如图4 和表5 所示。当无人机电池暴露在气温过低环境时,电池内部的化学物质活性会显著降低,严重影响电池性能。因此,电池仓配备了加热器,保证电池在寒冷条件下能够正常使用,同时配备散热风扇,用于在夏天温度过高的情况下对电池进行散热。充电仓整体采用与电池外壳材质相近的耐磨尼龙材料,润滑性好,并且与电池外壳有着相近的热膨胀系数,在温差发生变化时,对换取电池精度的影响相对较小。充电仓的上端设置了传感器,用于检测电池是否在充电仓内,增加了设备保护的可靠性和安全性。

表5 电池仓部件名称

图4 电池仓组合图
1.5 举升单元
举升单元主要由升降立柱、升降停靠平台、精夹持机构和辅助平台动力组合等部件构成,结构如图5 和表6 所示。升降立柱采用滚珠丝杆直线传动方式,具有传动效率高、运行平稳、高精度定位等特点。精夹持定位机构用于在换取电池过程中对飞机进行定位,同时对无人机的开关机进行设置。
阅读杂文之“三乐”,仅是我个人的粗浅感受。而每个人看事物的角度不同、爱好不同、取舍标准也不同,所以,阅读杂文,很可能还有四乐、五乐、六乐也说不定。但无论怎样,只要认真执着地阅读杂文,无疑就会乐在其中。诸位不妨一试。
上个世纪70年代中期,二哥高中毕业回到村里不久,母亲因一次意外摔伤而导致半身不遂,此时,充满理想信念的二哥选择了现实,大哥在部队服役,大姐二姐已出嫁,妹妹弟弟尚小,父亲一人满足不了一家人的口粮,他义不容辞地担负起照顾母亲与养家糊口的双重责任,他不许饱受时代艰辛与不幸的母亲再受任何伤害,在母亲人生的最后10年,二哥拒绝了婚姻和上学的机会,他学会了家庭医疗和护理,创造了让一位偏僻乡村重症截瘫的人生存10年的奇迹。
表6 举升单元部件名称
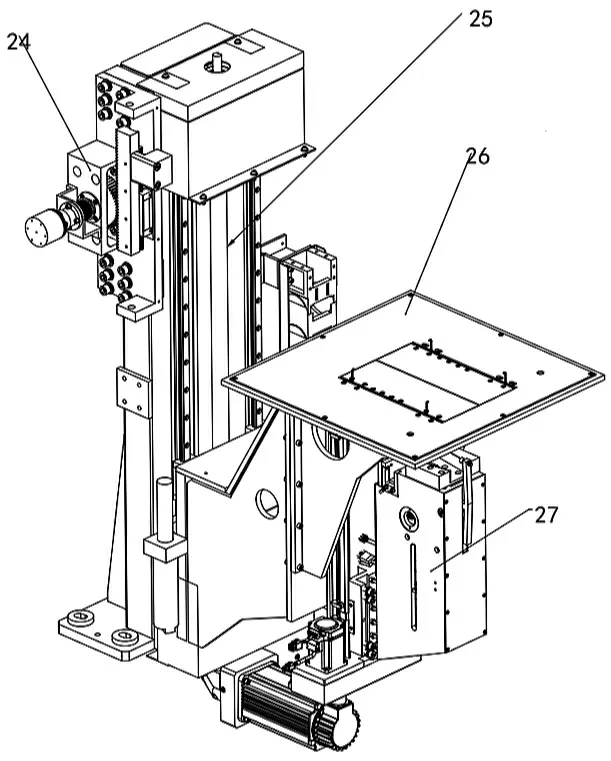
图5 举升单元结构图
2 关键零部件选型计算
选取对滚珠丝杆传动的伺服电机进行选型计算以及对同步带和带轮进行选型计算。
2.1 伺服电机选型计算
Y 轴加长模组及升降立柱等传动方式均为滚珠丝杆传动,而电机作为传动的动力源,选用一款符合要求的电机可以提高设备整体的工作效率。闭环控制的伺服电机与其他开环控制的电机相比,精度更加精确,因此选择伺服电机作为驱动动力。由于不同构件的电机选型计算方法基本一致,因此以升降立柱为例进行计算。升降立柱整体工作行程为700 mm,时间为15 s,速度Vi为2.8 m/min,减速机速比i=10,丝杆导程为PB=0.01 m,负载为110 kg。
电机转速计算公式为
式中:η 为机械效率。
轴向负载为
式中:FA为外力;m 为物体质量;a 为移动方向与水平轴夹角。
负载转矩为
云计算是依据网络虚拟技术为基础的一种新型的技术,具有很强大的计算功能,这也为越来越多的企业在捕获信息以及处理消息和存储方面上升了层次,对于电子商务这种较为新型的商业发展模式来说,云计算需要借助大数据来进行有效的处理,保证其更加稳定地运行以及管理。
通过统计最终的调查数据得出满意度调查的结果,护理组人员满意度如下:十分满意62.5%,较为满意36.0%,不满意2.0%,其总体满意度为:98.0%。对比组满意度如下:十分满意38.0%,较为满意30.0%,不满意32.0%,其总体满意度为:68.0%。护理组的患者满意度明显高于对比组,差异有统计学意义(P<0.05)
总惯量为
滚珠丝杆的惯量
机械手单元作为自动机场的关键部件,设计其机械结构时首先考虑机械手的整体设计要满足自动机场的使用需求,然后考虑机械手的稳定性、实用性及经济性,最主要的是在保证能够实现所有功能情况下,具有优良的性能,其主要技术参数见表3。
式中:LB为丝杆长度,LB=1.1 m;DB为丝杆直径,DB=0.032 m;ρ 为密度,ρ=7 900 kg/m3。
应用SPSS 14.0统计软件分析本次研究数据,其中计数资料采用百分率(%)来表示,运用χ2检验组间并发症发生率和治疗有效率对比,而计量资料则运用均数±标准差来表示,组间比较采用t检验,以P<0.05表示存在显著差异。
联轴器惯量
带速为
负载的惯量
式中:t1为加速时间,根据实际工况定为0.1 s,初选电机为750 W 伺服电机,电机转动惯量Jm=0.000 2 kg/m2。
取安全系数S=5,伺服电机额定转矩为2.39 N·m,减速机速比为i=10,即减速机及输出转矩为23.9 N·m,满足系统所需转矩。
惯量比为
折算后减速比为
选定电机的转动惯量大于负载转动惯量的1/30,因此电机满足要求。
2.2 同步带及带轮选型计算
由于设备有多处同步带传动结构,因此以具有代表性的天窗单元为例进行选型计算。天窗由单动力驱动做左右对称运动,同步带负载为两边滑盖及上盖重量,同步带通过滑轨滑块进行导向,考虑到摩擦力的影响,移动负载为240 N,整体行程为670 mm,时间为5 s。
传递功率为
根据实际工作情况并参考《机械设计手册》表,选取载荷修正系数KA=2,并且为了自动机场后期维护方便,选用5 M 圆弧带。根据带速和安装尺寸要求,z 尽可能选择较大值,因此选取齿数z=20。
现阶段我国的智能旅游仅仅停留在概念阶段,发展的初期,因此各种信息化建设的基础都没有正式实施。多数旅游景点有投入专项经费进行基础硬件购买,但网络以及收费管理等都较差。要想完全实现智能旅游,基础设施的建设依然要持续较长时间。旅游行业的产业要素也要得到有效的整体。平台的智能化、监管水平都较差。
设计功率为
式中:mC为联轴器质量,mC=0.285 kg;DC为联轴器直径,DC=0.056 m。
式中:节圆直径d1=31.83 mm。经查《机械设计手册》表中Vmax允许的最大转速为40 m/s。
图3给出了m取值为3~8时在不同误比特率下完成识别所需的数据量.可以看出,在相同数据量下,m越小,误码适应能力越好;在相同误比特率下,m越小,识别所需数据量越小.
主动轮与从动轮同一个型号,所以传动比i=1,且d1=d2=31.83 mm。查表得基准额定功率P0=0.139,带长系数KL=1.2,小带轮齿合系数KZ=1,基准带宽bS0=9。
带宽为
考虑后期设备的整体维护以及其他同步带规格不一致,带宽bS统一取15 mm。
3 关键承重结构件进行强度及刚度校核
由于不同结构单元的静强度及刚度校核方式基本一致,以自动机场支撑立柱与升降立柱的静强度为例进行校核简化分析。
3.1 系统支撑立柱的静强度分析
自动机场的天窗单元,W 夹夹紧单元,外壳左右上盖的重力都作用在4 个系统立柱上,由于自动机场整体对称分布,所以4 个系统立柱均匀受力,即总载荷为400 kg,作用在单个立柱上的静载荷约为100 kg。
(1)龙头企业带动型。这是一种“龙头企业+基地+农户”的发展模式,它以农副产品加工、营销企业为龙头,对外开拓国内外市场,对内连接生产基地和农户[3-5]。
材料为Q235B,屈服强度为235 MPa,考虑到吊装、运输及材料本身缺陷等因素的影响,取安全系数为5,得到系统立柱的许用屈服强度为47 MPa。通过对静强度结果分析可知,在工况实验下支撑立柱的最大应力为4.6 MPa,如图6 所示。最大应力小于系统立柱的许用屈服强度,安全系数为10.2,最大变形量是0.02 mm,能够满足实际工况对结构参数要求,结果如图7 所示。
詹姆斯在早期作品《戴西·米勒》中运用第三人称视角,但仍具有明显的全知叙述和现实主义痕迹;在其中期作品《螺丝在拧紧》中采用套叠式叙事视角,运用第一人称由多个叙事主体叙述故事,使故事更加扑朔迷离;詹姆斯在后期形成了更加成熟的单一叙事视角、双重叙事视角及多重叙事视角的综合运用,是作品更具现代性。

图6 系统立柱应力图
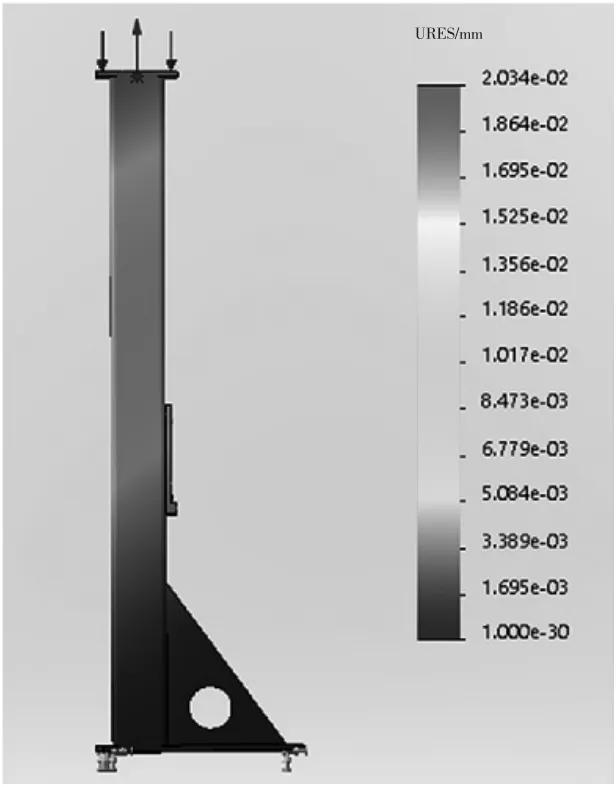
图7 系统立柱位移图
3.2 升降立柱的静强度分析
当飞机在升降平台上降落时,升降立柱的载荷最大,此时升降平台重力、飞机重力、飞机降落时产生的冲击力这三者的合力共同构成了升降立柱所承受的载荷,该载荷瞬时最大值约为1 700 N。为了方便计算,将该总体载荷简化为远程载荷,其作用于4 个滑块上,并只计算升降立柱的静强度。此外,由于滑块有足够的刚度,在建模时设定滑块为刚性体。材料为Q235B,其屈服强度为235 MPa,取安全系数为5,得到许用屈服强度为47 MPa。
通过对静强度结果分析可知,在工况实验下支撑立柱最大应力为15.7 MPa,如图8 所示,最大应力小于系统立柱的许用屈服强度,安全系数为2.99,最大变形量为0.13 mm,如图9 所示,能够满足结构参数要求。

图8 升降立柱应力图

图9 升降立柱位移图
4 结束语
本文分析了无人机自动机场运行结构需求,理清了无人机在起飞、回收、换电等动作过程中涉及的机械构件,分析了各个单元结构在运动过程中的逻辑关系,并充分考虑到机械动作的精度和动作冗余量,对无人机自动机场的W 夹夹紧单元、机械手电池仓、举升单元等关键零部件进行了详细设计。选用精度更高且闭环控制的伺服电机作为驱动动力,对伺服电机进行选型计算使输出转矩及转动惯量均满足实际工作要求。对关键承重结构件进行强度及位移量校核,最大应力小于系统立柱的许用屈服强度,安全系数与最大变形量均符合结构参数要求。最后,该设计方法通过实际样机验证,具有结构强度高、维护简单、全自动智能化管理等优点,有助于拓展电力巡检无人机的应用范围。
