基于GRU-CNN 的双馈风力发电机电刷滑环电弧故障诊断
2023-08-27张博文莫英东王晗钰袁帅
张博文,莫英东,王晗钰,袁帅,2
(1.200093 上海市 上海理工大学 机械工程学院;2.230601 安徽省 合肥市 高节能电机及控制技术国家地方联合工程实验室)
0 引言
据全球风能理事会(Global Wind Energy Council,GWEC)发布的分析报告显示,风电总装机规模已增长到8.37 亿kW,据估计全球未来10 年内将以当前的3 倍速度安装和发展风力发电设施[1]。该报告表明风电将成为世界各国实现能源生产清洁化的关键途径之一[2]。风能作为近年发展最快的能源类型,具有很强的竞争力和经济效益。双馈风力发电机(Doubly-Fed Induction Generator,DFIG)凭借其转速灵敏、功率变换双向、变频控制灵活等特点广泛应用于风电事业[3]。风力发电机组是一个涉及空气动力、机械、电子、电气、控制等诸多技术领域的复杂能量转换系统[4]。由于直流串联故障电弧会使回路电流下降,传统的保护装置无法对其进行有效检测,直流电流无过零点的特性使得故障电弧在无人为处理情况下持续燃烧,从而对系统线路及人身财产安全造成巨大威胁,因此需要对直流故障电弧进行有效检测,从而及时切除故障回路,减小故障电弧危害性[5-6]。
作为发电机的动静转换器件,运行中的电刷滑环系统发生故障会导致发电机无法稳定运行,甚至出现发电机电刷过热损坏造成机组减负荷后停机的问题[7]。在故障电弧检测层面,目前研究成果主要集中于故障电弧的弧声特性、弧光特性、电气特性及电磁特性[8-10]。DFIG 的电刷滑环系统的故障会影响电力设备的稳定运行,因此对电刷滑环的故障检测系统的研究至关重要。
目前,国内外对DFIG 电刷滑环系统中的电弧故障研究尚不充分[11]。Amirat 等[12]提出一种将电流信号与振动信号结合起来,通过检测电流信号和振动信号来判断故障的检测方法;詹辉[13]提出一种利用时域分析与频谱分析相结合的方法进行故障判断,但是当信号的频率和采样的频率不一致时,就会产生频谱泄露以及栅栏效应,影响结果的精确性;卢其威等[14]提出一种基于小波变换与奇异值分解的电弧故障检测方法,但是该方法会忽略一部分比较微弱的故障信息;马征等[15]在FFT 变换以及数学形态滤波的基础上提出了一种基于高频电流频谱分析的故障电弧检测方法,但并未给出准确的检测率;焦治杰等[16]利用短时傅里叶变换对光伏直流故障电弧的电流信号进行分析,再采用卷积神经网络检测故障电弧;张婷等[17]通过对故障电弧的时域分析,引用归一化卷积神经网络,优化了传统神经网络在电弧故障识别上的不足,提高了一定的检测精度,但仍有不小提升空间;邓佳康[18]提出一种基于BP 神经网络的电弧检测算法,但是该网络的训练速率较低,会导致训练时间过长,并且该网络可以使权值收敛到某个值,但并不保证其为误差平面的全局最小值。上述方法的不足表明,电弧故障检测的精确性和可靠性仍需改进。
综上所述,目前对于直流故障电弧检测特征的挖掘主要通过不同类别、不同角度的方法进行研究,从中选择最为适合的方法构建相关的检测特征量,最终形成故障电弧检测算法[19-20]。本文提出一种基于GRU-CNN 融合网络模型的双馈风力发电机电刷滑环系统电弧故障的检测方法,该模型使用CNN提取数据的输入特征,构建特征向量,减小原始数据规模,然后利用GRU 神经网络学习数据的内部动态变化规律,实现预测。搭建实验平台,将采集到的电弧信号滤波后形成训练数据集,再使用上述模型进行机械学习,提取电弧特征数据集,实现高效率高精度的负载分类识别和串联电弧故障检测。
1 DFIG 电弧故障诊断试验平台搭建
DFIG 电刷滑环系统串联电弧检测平台由电弧发生装置和检测装置组成,电弧生成装置包括变频器、滤波器、变压器、电机及电刷滑环装置,一端通过变频器控制三相异步电动机启动进而带动滑环转动,另一端通过变压器、正弦滤波器以及变频器并入电网。电弧检测装置包括磁环和数据采集模块,用于收集电弧数据并对电刷滑环进行电弧故障检测;电流钳、罗氏线圈和示波器为辅助验证手段。DFIG 的电刷滑环系统串联电弧检测平台示意图如图1 所示。其中,电刷滑环系统使用2.2 MW的DFIG。内部包含三相励磁滑环和6 个均匀分布的电刷。

图1 DFIG 电刷滑环系统串联电弧检测平台Fig.1 DFIG brush ring system series arc detection platform
为了实现DFIG电刷滑环系统的电弧故障模拟,选择3 组厚度约为1 mm,耐久温度可达1 000 ℃的高温绝缘带均匀粘贴在滑环表面,能使电刷和滑环之间的接触不均匀,从而产生电弧。在工况环境下,电刷滑环的磨损问题无法及时解决,电弧会随着时间不断产生,加剧电刷滑环表面的磨损程度,因此需要及时发现故障并对其进行诊断,这对检测系统的实时性、精确性以及可靠性都有更高要求。
2 GRU-CNN 模型构建原理
2.1 CNN 结构
卷积神经网络(Convolutional Neural Network,CNN)在计算机视觉、自然语言处理等领域已被广泛应用[21]。CNN 是一类包含卷积计算且具有深度结构的前馈神经网络[22]。一般而言,CNN 由3 部分构成:卷积层、池化层和全连接网络,如图2 所示。

图2 CNN 网络结构图Fig.2 Neural network architecture of CNN
2.2 GRU 工作原理及结构
门控循环单元(Gate Recurrent Unit,GRU)是常用的循环神经网络的一种[23]。GRU 网络采用了门机制,将激活函数导数的连积变成了加法,同时只有长时记忆函数参与反向传播,解决了梯度消失的问题,因此能有效简化调参复杂度,并且门机制提供了特征过滤功能,能够有效保存长期记忆。
门控循环单元网络与长短期记忆(Long and Short-Term Memory model,LSTM)网络具有相似的单元内的数据流。LSTM 网络和GRU 网络的结构如图3 和图4 所示。

图3 LSTM 网络结构图Fig.3 Neural network architecture of LSTM

图4 GRU 网络结构图Fig.4 Neural network architecture of GRU
图4 中:Ht——GRU内部记忆状态向量;Ht-1——上一时刻的隐藏状态,包括之前节点所见过数据的信息;ht——传递到下一时刻的隐藏状态;——候选隐藏状态;Rt、Zt——重置门和更新门;σ——Sigmoid 函数;Xt——当前节点的输入。
在生成当前时刻全局信息时,由于LSTM 中遗忘门和输入门代表的前t-1 个时刻的全局门控信息和当前隐藏状态门控信息是一种此消彼长的耦合关系,在GRU 中使用更新门来替代这种复杂的耦合关系,而GRU 中的复位门直接应用于LSTM 中的隐藏状态,故LSTM 复位门的任务在GRU 中被分开由重置门和更新门来完成,大大简化了计算过程。由于存在长期记忆,上下文状态信息会有所多余,所以相对LSTM,GRU 中不存在上下文状态信息。
重置门控制遗忘多少过去的信息,更新门就控制前边记忆信息继续保留到当前时刻的数据量。首先,通过ht-1和xt获取重置门和更新门的状态。
式中:Wxr,Wxz,Whr,Whz——权重参数,Wxr,Wxz∈Rd×h,Whr,Whz∈Rh×h;br,bz——偏差参数,br,bz ∈R1×h。
然后将当前时间步重置门的输出与上一时间步的隐藏状态作按元素乘法,若重置门中元素值接近于0,则丢弃上一时间步的隐藏状态。若重置门中元素值接近于1,则会保留上一时间步的隐藏状态。然后将按元素乘法的结果与当前时间步的输入联结,再通过激活函数tanh 的全连接层计算出候选隐藏状态。可见重置门能够控制上一时间步的隐藏状态流入当前时间步候选隐藏状态的方式,因此重置门可以丢弃无关的信息。
式中:Wxh,Whh——权重参数,Wxh∈Rd×h,Whh∈Rh×h;bh——偏差参数,bh∈R1×h。
最后,时间步t 的隐藏状态Ht∈Rn×h的计算使用当前时间步的更新门zt来对上一时间步的隐藏状态Ht-1和当前时间步的候选隐藏状态做组合。
更新门可以通过控制包含当前时间步信息的候选隐藏状态是否更新上一时间步的隐藏状态,这种设计能够更好地捕捉时间序列中的关系。
3 电弧故障检测控制系统设计
3.1 GRU-CNN 网络模型模型构建
GRU模型能够学习数据内部的动态变化规律,CNN 模型可以提取数据的隐藏特征,为使检测模型的效果更加优秀,将GRU 模型与CNN 模型结合,其网络结构图如图5 所示。
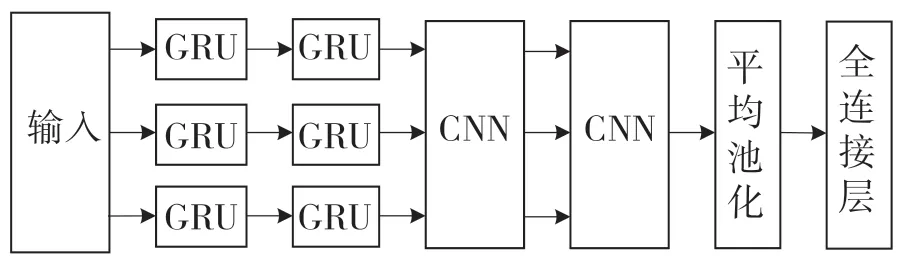
图5 GRU-CNN 电弧故障检测模型网络结构图Fig.5 Network structure diagram of arc fault detection model based on GRU-CNN
前2 层为GRU 层,第1 层和第2 层的内存向量长度均为6,第2 层的内存向量长度为6。第1层CNN 定义了60 个卷积核大小为100 的滤波器(神经元),设置步长为2 来对权重参数降维,第2 层CNN 定义了120 个卷积核大小为50 的滤波器。第1 次卷积和第2 次卷积之间增加一个BN 层,加快网络的收敛速度。第1 层和第2 层卷积层都采用ReLU 函数作为激活函数,可以使稀疏后的模型能够更好地挖掘相关特征,拟合训练数据,并且可以降低计算的复杂度。第2 层卷积运算结束后接入一个大小为2,步长为2 的GAP 层和一个BN 层。最后一个全局平均值池化层选取网络参数的平均值采样,能使卷积结构更简单,并且不需要进行参数优化,能够可以避免过拟合。
全连接层将卷积层和全局平均值池化层计算得到的分布式特征空间映射到样本标记空间的特征,在模型中起到组合特征和分类的功能,大大减少了特征位置对分类带来的影响,提高了整个网络的鲁棒性。
为全面分析电弧检测模型效果,需选择更有表达力的评估指标。故障电弧检测本质上是二分类问题,采用混淆矩阵中的精确率(precision)和召回率(recall)2 个指标对二分类模型进行性能评估。
3.2 电弧故障检测流程
首先搭建电弧故障检测平台,平台由电弧发生装置和检测装置组成,再通过数据归一化处理获取一维电弧数据集;其次设计合适的检测模型对电弧进行识别;然后使用合适的神经网络模型训练电弧检测模型;最后通过电弧的各项数据指标来判断是否产生电弧。系统的整体架构如图6 所示。

图6 DFIG 电刷滑环电弧检测系统的整体架构Fig.6 DFIG brush ring arc detection system
电弧检测的具体流程:首先使用罗氏线圈和磁环作为信号采集工具进行电弧检测。罗氏线圈内的电流随时间变化,会在线圈内感应出变化的磁场,其输出信号是电流对时间的微分。积分放大电路可以还原输入电流信号,通过数据采集模块将信号转换为数字信号。磁环通过检测电磁辐射的变化来识别故障电弧,再将ADC 采样卡通过BNC 接头与磁环连接,通过串口将数据传输到上位机进行数据处理和保存,并使用PyQt5 编写上位机GUI 来实现人机交互,检测到故障信号后会通过微信小程序提示。上位机GUI 如图7 所示。

图7 上位机GUIFig.7 Upper computer GUI
4 实验分析
4.1 数据预处理
利用小波变换分析方式和小波软阈值法[24]对数据进行预处理,将分解层数设为4。基于db4 正交小波对原始信号处理得到去噪信号如图8 所示。

图8 故障电弧去噪的时域波形Fig.8 Time domain waveforms of fault arc denoising
DFIG 电刷滑环系统检测平台正常运行时参数设置如表1 所示。

表1 电刷滑环检测平台正常运行参数设置Tab.1 Parameter settings for normal operation of brush ring detection platform
由于DFIG 在实际运行中的转差率不能一直为0.2,所以为了实现DFIG 在实际运行中的馈电参数,需要设置不同的运行参数,并在正常与故障条件下进行数据采集。
将磁环、电压传感器及电流传感器的信号经过小波去噪后作为原始数据,每个传感器一个周期的输入小波去噪后的磁环、电压传感器及电流传感器的信号记为一维向量,其输入数据的范围需要根据交流信号的特征设置,并且,为了解决数据之间的差异以及加快网络收敛,需要采用数据归一化的方式来去除量纲。
4.2 模型训练
本文基于Keras 框架建立组合网络模型,设置的超参数包括学习率、迭代次数等如表2 所示。

表2 基于GRU-CNN 电弧检测模型超参数设置Tab.2 Hyperparameter setting of arc detection model based on GRU-CNN
电刷滑环电弧检测系统得到的GRU-CNN 的模型训练曲线如图9 所示。在测试集上对模型进行检验,获得模型的检测效果以及混淆矩阵如图10 和图11 所示。

图10 基于GRU-CNN 电弧检测模型的测试效果Fig.10 Test effect diagram of arc detection model based on GRU-CNN

图11 基于GRU-CNN 的电弧检测模型的混淆矩阵Fig.11 Confusion matrix of arc detection model based on GRU-CNN
4.3 检测模型结果对比分析
在相同训练数据参数及历史数据下,分别对GRU 网络、CNN 网络和GRU-CNN 网络进行训练,迭代次数为100 次,学习率为0.001,训练结果数据对比如表3 所示,训练结果对比图如图12 所示。

表3 模型的训练结果对比Tab.3 Comparison of training results of models

图12 模型的训练曲线对比图Fig.12 Comparison chart of model training curve
可以看出,在训练过程中,基于GRU-CNN 的训练速度和收敛速度相较单独基于CNN 的电弧检测模型较慢,但是精确率有明显提升,相较于单独基于GRU 的电弧检测模型,不论是训练速度、收敛速度抑或是精确率,都有比较明显的提升。
5 结论
本文主要对DFIG 电刷滑环系统的电弧故障诊断方法进行了研究。首先搭建电弧故障诊断试验平台;其次设计电弧故障检测模型,构建GRU-CNN的电弧检测模型;最后,将处理后的一维向量数据作为检测算法输入,调节模型训练的相关参数,优化检测模型,得到相关检测结果。结果表明,基于GRU-CNN 的电弧检测模型具有较高的精确度和较快的训练速度,可以实现DFIG 电刷滑环故障电弧的高效检测,具有实际的工程研究意义。