扫地机专用风机减震的仿真与测试研究
2023-08-24于晓娟郑磊张东旭王磊
于晓娟 郑磊 张东旭 王磊


摘要:以扫地机专用风机振动特性为研究对象,运用力学模型简化模拟计算和软件仿真,对扫地机专用风机的振动系统和模型进行数值计算,获得扫地机振动特性。通过计算与仿真结果确定了风机减震垫刚度;让风机电机的工作转速避开了结构共振点;预估了结构的振幅,并与实验结果进行了应证。
关键词:力学;扫地机专用风机;模拟计算;软件仿真;振动特性
中图分类号:U468 收稿日期:2023-06-28
DOI:10.19999/j.cnki.1004-0226.2023.08.018
1 前言
纯电动扫地机作为城市非机动车道、巷道、商业广场、公园、旅游景区、观光带等场所的清扫机械,是实现环卫机械化作业的关键设备[1]。其中,清扫的清洁度主要取决于风机的性能。风机的工作转速高达3 000 r/min以上,减震垫的合理设计,可以有效地降低噪音,提升风机可靠性[2]。
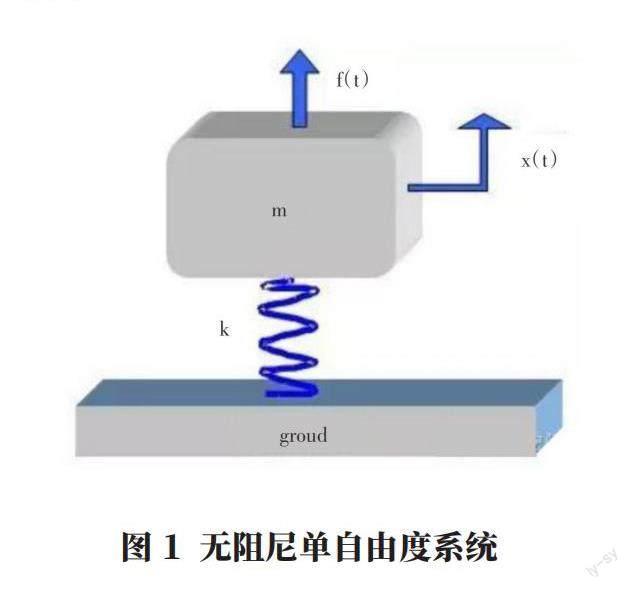
当一个振动系统不是一个刚体或者支点不是固定支点时,需要采用有限元法、边界元法、解析方法等复杂的计算方法。在实际工程中,通常会先采用简单的计算方法,假定整个减震系统是无阻尼单自由度系统(图1),估算系统的固有频率,然后再根据估算结果选择有限元法进行更加精确的计算[3]。本文采用设计计算→软件仿真→装机实验→调试定型的技术路线,对整个产品开发过程进行解析。
2 设计计算
在隔振系统效果评价中,常用振动隔离系数T来表征隔振系统的隔振效果。传递系数T值越小,相同激励条件下通过隔振系统传递过去的力就越小,隔振效果也就越好[4]。隔振设计的目的就是选择并设计合适的隔振参数,使得T值较小[5]。图2所示为振动传递系数T与λ=ω/ω0、ζ的关系曲线(ζ为相对阻尼系数,也称阻尼比,是阻尼系数与临界阻尼系数的比,是一个量纲一变量)。
从图1可以看出,T与频率比λ=ω/ω0呈非线性关系。随着λ的增大,T先急剧增大,在λ=l时达到最大值,此时体系产生共振,造成风机基础部位强烈振动,从而致使风机不能正常工作和减震垫疲劳损坏;其后T减小,且不同ζ值的曲线均交于λ=[2]处。当λ≤[2]时,T≥1,减震垫不能起减震作用;当λ>[2]时,T<l,减震垫发挥减震作用;且ζ越小、λ越大,T减小的幅度越大,减震效果越好。可见,选择减震垫时,应选用低阻尼橡胶材料。由于风机的重量和工作转速是确定的,因此一般通过调整减震垫的?n控制T。但T不能过小,否则减震垫的?n过低,相应的减震垫的K过小,要达到相同的减震效果,减震垫的体积过大;根据试验结果,T一般取0.4~0.1之间。计算公式如下:
风机的振动传至基础部位(机壳)会引发系统振动和噪声。在风机与基础部位之间安装橡胶减震垫,可减少振动的传递。本案例的风机减震垫安装在风机的4个底脚,按风机+驱动电机的重心呈对称分布。在风机振动的激励下,减震垫产生相应的固有频率振动。固有频率的计算公式如下:
式中,?n减震垫的固有频率,Hz;K減震垫的动刚度,N/mm;m为支撑垫以上的质量,kg。
本案例扫地机未用风机通过4个减震垫与车厢连接,扫地机和风机模型分别如图3、图4所示。设定电机的工作转速为3 000 r/min,则激励频率为50 Hz;取ζ=0.2,当T=0.125,根据式(1)计算λ=4.001;已知风机+驱动电机重力为864.46 N,电机的工作转速为3 000 r/min,则激励频率为50 Hz;取ζ=0.2,当T=0.125,计算ω/ω0=4.001,则系统固有频率为12.5 Hz;根据式(2)计算4个减震垫的总刚度为544 N/mm;根据减震垫与重心的位置关系,前后支点分别选择刚度系数为197.9 N/mm和74.1 N/mm的圆柱形橡胶减震垫。
3 Ansys软件仿真
模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。Ansys软件的模态分析功能,通过分析结构的振动特性,确定结构的多阶固有频率和振型。它也是谐响应分析、瞬态动力学分析以及谱分析等其他动力学分析的基础[6]。通过对风机结构进行模态分析,得到各阶自振频率;再利用谐响应分析,察看关键部位振动的幅值[7]。
分析的主要目标:a.风机工作频率避开风机旋转激励方向一致振型的固有频率;b.在电机的不平衡转矩的激励下,评估电机安装板振动响应下的最大变形量[8]。
几何模型导入ANSYS Workbench软件及网格划分可以参考工具书,不再赘述。提示两个关键点:a.风机电机模型结构复杂,网格数量大,占用大量的计算资源,可用“点质量”代替电机(见图5),简化结构;b.4个减震垫安装处的接触关系,选择为“几何体-地面”的弹簧约束(见图6),刚度系数为该处减震垫的刚度系数。
通过软件计算,得到系统的一阶频率为10.33 Hz,自由度方向为重力方向(图7),与上文简化方法计算的12.5 Hz相差约17.4%,可以验证方法是可行的。
系统的二阶频率为30.897 Hz,自由度方向为电机的旋转方向(见图8),对应的转速是1 854 r/min,即电机的工作转速要避开此转速,避免产生共振。
其他阶频率不再展开,本设计主要考虑的两个振动方向是重力方向和电机的旋转方向。
在电机安装轴上加载风机叶轮的转矩,采用谐波响应模块对电机安装板的振幅进行仿真(见图9),可以看到,在31 Hz左右(二阶频率点)时的振幅最大,为20 mm。
4 装机测试
采用东华测试的DH3822便携式动态信号测试分析系统(图10),对风机的驱动电机安装板振动情况进行测试。在电机1 800 r/min时,通过加速度传感器+多通道信号分析系统(图11)测试,图12位置的振幅为30 mm左右(图9仿真结果为20 mm左右),产生了较大的共振和噪声;测试结果和仿真结果相近。原风机设定的工作档位是1 400 r/min(快速保洁)、1 800 r/min(经济模式)、2 400 r/min(标准模式)、3 000 r/min(强力模式),由于共振的原因,直接取消了经济模式这一档。
5 结语
本文通过仿真设计和手工计算相互验证,确定了风机减震垫刚度;通过有限元模态分析,让风机电机的工作转速避开了结构共振点;通过谐波响应分析,预估了结构的振幅,并与实验结果相应证。采用手工计算、仿真设计、实验验证相结合的方法,可以大大提高工程设计的准确率。本案例的研究结论可为广大工程技术人员进行高速旋转机械的减震设计提供有价值的参考。
参考文献:
[1]朱世开.扫地机吸送式稀相气力输送系统的计算[J].中国新技术新产品,2022(24):72-74.
[2]韩雪松,李锡庆,陆美文.路面自适应扫地机盘刷触地压力调整装置的研制[J].装备制造技术,2021(12):35-38.
[3]李静,杨宏斌,任继华,等.智能扫地机滚刷齿轮箱的振动特性仿真分析及试验研究[J].机械传动,2021,45(8):124-129.
[4]倪奕金,张丽.扫路车气力输送系统设计[J].专用汽车,2009(8):50-52.
[5]Abubakkar A, Achuthan R, Yeasigan S K, et al. Design and fabrication of mobile app-controlled floor sweeper[J]. Materials Today: Proceedings, 2022, 55: 365-369.
[6]许煌,袁练,尹志斌,等.基于液压式传动技术和单片机的垃圾自动清扫机设计[J].内燃机与配件,2019(12):284-286.
[7]廖菁波,张潇丹,耿亚囡,等.智能扫地机控制系统的设计[J].内蒙古科技与经济,2019(8):84+140.
[8]窦玉欣,李彩霞,徐从晓,等.驾驶式扫地机的设计[J].河北农机,2018(9):57-58.
作者简介:
于晓娟,女,1974年生,工程师,研究方向为智能环卫装备。