方程式赛车动力传动系统参数匹配模型及快速配置界面开发
2023-08-24于建王东洋董铸荣邓志君
于建 王东洋 董铸荣 邓志君


摘要:对电动赛车动力传动系统中各关键部件参数进行提取,设计方程式赛车动力传动系统交互式参数匹配界面,快速分析动力传动系统中关键零部件的某项参数对整车性能的影响及其影响规律,为参数的选取提供参考。同时,对于零基础的赛车爱好者或车队新成员,通过提供友好的交互界面可实现对赛车动力传动系统参数的设计,为赛车设计知识的普及、赛车技术的推广提供良好的载体,对车辆工程专业人才的培养及赛车文化的推广具有重要意义。
关键词:电动方程式赛车;动力参数匹配;界面开发
中图分类号:U461 收稿日期:2023-05-19
DOI:10.19999/j.cnki.1004-0226.2023.08.007
1 前言
中国大学生电动方程式汽车大赛(Formula Student Electric China,FSEC)是一项由高等院校在校生组队参加的汽车设计和制造的比赛,大赛规则是根据国际(美国)汽车工程学会大学生电动方程式汽车赛车赛事规则和德国赛的规则来撰写的,要求各参赛车队在一年时间和一定的经费预算条件下,自行设计和制造一辆动力性、经济性和耐久性等整车综合性能卓越的小型单人座休闲汽车。在有限时间和经费的条件下造出性能优越的车辆,不仅要求学生和业余赛车爱好者具备较强的动手能力,同时也对其在设计制造过程中的容错性提出了苛刻的要求。利用仿真建模技术可提高设计的效率,并降低设计过程中的错误成本,另外需要对仿真模型进行深度开发,设计交互式方案选择界面,可降低对赛车设计者的专业要求,让车队新人或业余爱好者参与到赛车设计中[1]。
一台动力强劲、节能高效和耐久性能好的赛车在设计时需要对赛车动力传动系统部件参数进行合理的匹配。电动方程式赛车的动力传动系统包括电池、电机、电控和减速器等动力传动装置。各动力传动装置包含不同的参数,对各参数的合理匹配是保证整车性能卓越的必要条件,采用台架試验的方法不仅开发周期长,且购买零部件成本较高,同时存在一定的安全风险,而利用计算仿真工具建立车辆仿真模型可减小参数选取的盲目性,同时缩短开发周期,降低开发成本。
本研究以深圳职业技术学院“魅影”方程式赛车队电动车为对象,基于大学生方程式赛车设计规则,利用数学建模的方法,分别建立了方程式赛车动力传动系统中的电池模型、电机模型、电控模型以及整车动力学模型,利用Matlab/Simulink搭建了整车仿真模型,分析了NEDC、WLTC和FTP15三种不同工况下车辆的动力性和经济性。在此基础上,为实现方程式赛车动力传动系统参数的快速匹配,开发了电动方程式赛车动力传动系统关键零部件参数匹配交互式系统,通过对系统的仿真测试,验证了所开发界面的有效性。
2 电动方程式赛车动力传动系统模型
2.1 电动方程式赛车动力传动系统分析
电动式方程式赛车动力传动系统由电池、电机控制器、电机和车轮等关键部件组成,车轮在行驶时,动力从电池端流出,经过电机控制器到电机再到车轮,从而驱动电机行驶[2]。因此,在建模的过程中,依据电动方程式赛车的功率流向,分别建立其动力传动系统的动力学学模型。
2.2 电池模型
作为方程式电动赛车能量的来源,动力电池参数的合理匹配对实现车辆动力性和经济性至关重要,为满足整车动力性、经济性和轻量化的要求,需要根据车辆行驶工况对电池容量进行合理的选型和计算[3]。因方程式赛车工况较为复杂,对电池安全性要求较高,所以选用产品性能稳定和一致性较好的钴酸锂电池作为动力源。根据所选取电芯的类别、电机电压需求和车辆续驶里程的要求,确定电芯的个数。本研究中分别采用NEDC(New European Driving Cycle,NEDC)工况、WLTC(World Light Vehicle Test Cycle)工况和FTP-15(Federal Test Procedure-15,FTP-15)工况,并通过下式来预估动力电池的容量:
式中,We为电池组总能量,kW·h;ns为电池组串联数;np为电池组并联数;Ue为电池单体额定电压,V;Ce为单体电池容量,A·h。
电池单体类型和数量的选择可确定车辆的动力性,但对其经济性和耐久性的优化还需要对电池状态进行实时监测,电池荷电状态(SOC,State of Charge)是表示电池状态的重要参数,其可用如下公式表示:
式中,SOCk为tk时刻电池SOC值;SOC0为初始SOC值;η为蓄电池充放电的效率;I为蓄电池的电流。
2.3 电机模型
纯电动方程式赛车采用轮毂电机驱动,不需要传动机构和差速齿轮,可按所需动力来分配两个电机的功率和转速,因此提高了整个系统的效率且节约了空间,使车身设计更加多变灵活。在控制方面,轮毂电机驱动的汽车可采用电子控制直接对驱动轮制动,同时可以结合机械制动,而且能实现制动能量回收。方程式赛车对电机参数的匹配过程主要是根据车辆的需求功率和最高车速,反向计算出电机的功率和转速[4]。
2.4 电机参数匹配
方程式赛车电机参数的确定主要包括电机功率参数和转矩参数的确定,其中,功率包括电机额定功率和最大功率。
在赛车设计过程中,根据最高车速和最大爬坡度来初步确定电机的功率,车辆以最快速度行驶时消耗的功率可表示为:
式中,m为整车质量,kg;f为滚动阻力系数;CD为空气阻力系数;A为迎风面积,m2;umax为车辆最高行驶速度。
当车辆以一定的速度在最大坡度上行驶时,其消耗的功率可表示为:
式中,θ为道路坡度;ua为车辆行驶速度,km/h。
在爬坡工况下,车辆所需的最大转矩可表示为:
式中,i0为传动比;r为轮胎半径,m;η为机械传动效率;θmax为坡道与水平面的最大夹角。
为使赛车具备良好的动力性能,根据动力参数设计原则,在理论计算基础上应适当增加一些余量,则电动赛车额定功率Pe_rate与最大功率Pe_max的关系可表示为:
式中,λ为电机的过载系数。
假设电动方程式赛车在75 m直线加速项比赛时以电机最大功率行驶,以3.8 s速度完赛,则可以由此计算出赛车的平均加速度,因此可由车辆行驶方程式计算出车辆在加速过程中的瞬时功率:
式中,[v]为车辆行驶速度,m/s;a为车辆加速度,m/s2。
由以上数据可计算电机的最大输出功率为77.11 kW,本研究选取两台额定功率为40 kW的轮毂电机。
2.5 车辆控制器模型
在方程式赛车动力传动系统开发前期,需根据一定的工况对整车负载进行预算,并设计出控制器来模拟驾驶员驾驶车辆[5],其主要思想是通过设计一个PI控制器作为驾驶员模型来模拟驾驶员驾驶车辆,设计一个整车控制器用来实现对整车驱动和制动的控制,进而实现对特定工况的跟随行驶。
首先建立驾驶员模型,驾驶员模型的作用是根据车速误差输出-1~1之间的比例信号,用来模拟对车辆的控制,其中,0~1之间就是踩加速踏板的信号、-1~0之间就是踩制动踏板的信号。当期望车速与实际车速的差值越大时,所需要的驱动力和制动力也越大。这二者之间呈一定的线性关系,所以需要一个P算法,由于算法和算法不能使闭环系统最后的误差消失成0,需要一个I算法累计误差值以提供更大的驱动力或者制动力而使得误差值消成0。
PI控制公式为:
式中,kp为比例系数;ki为积分系数。
车辆控制器模型通过驾驶员模型给出的信号来输出一个合适的加速踏板角度,以及一个合适的制动踏板的角度。
2.6 整车动力学模型
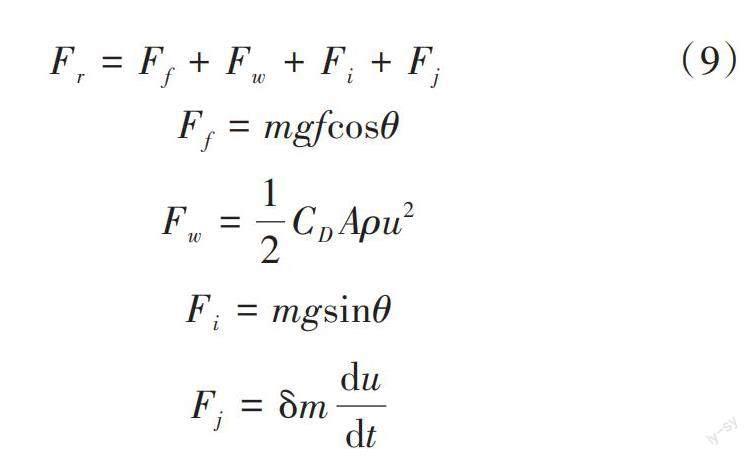
确定整车的动力性,就是确定车辆沿行驶方向的运动状况。为此,需要获取沿车辆行驶方向作用于车辆的各种外力,即驱动力与行驶阻力。根据这些力的平衡关系建立整车行驶方程式,就可以估算车辆的最高车速、加速度和最大爬坡度。其中,车辆在行驶过程中主要受到滚动阻力、空气阻力、加速阻力和坡道阻力等,可用下式表示:
式中,ρ为空气密度;v为车速;δ为汽车旋转质量换算系数。
基于整车行驶方程式即可求出车辆在运行时刻的运动学和动力学特性。整车行驶方程式为:
由整车行驶方程式模型及所建立的各典型部件的模型,并利用Matlab/Simulink搭建整车参数匹配仿真模型。搭建的整车仿真模型如图2所示。
2.7 参数匹配仿真分析
利用所搭建的模型,设置好所需匹配的参数进行方程式赛车整车参数匹配仿真分析,结果如图3~图5所示,仿真参数表如表1所示。
图3所示为NEDC工况下仿真结果,其中图3a是车辆的速度,图3b是车辆行驶的路程,图3c是车辆电池SOC的变化趋势,图3d是车辆实际车速与NEDC目标车速中的误差值。从图3d中可以看出,所设计的驾驶员模型对参考车速的跟踪误差值较小,最大误差低于0.6 m/s,且所配备的电池参数可支撑车辆完成4个NEDC循环工况,在此工况下,续驶里程可达44.12 km。
图4所示为FTP-15工况下仿真结果,其中图4a是车辆的速度,图4b是车辆行驶的路程,图4c是车辆电池SOC的变化趋势,图4d是车辆实际车速与FTP-15目标车速中的误差值。从图4d中可以看出,所设计的驾驶员模型对参考车速的跟踪误差值较小,最大误差低于0.4 m/s,且所配备的电池参数可支撑车辆完成3个FTP-15循环工况,在此工况下,续驶里程可达53.31 km。
图5所示为WLTC工况下仿真结果,其中图5a是车辆的速度,图5b是车辆行驶的路程,图5c是车辆电池Soc的变化趋势,图5d是车辆实际车速与WLTC目标车速中的误差值。从图5d中可以看出,所设计的驾驶员模型对参考车速的跟踪误差值较小,最大误差低于0.8 m/s,且所配备的电池参数可支撑车辆完成1个WLTC循环工况,在此工况下,续驶里程可达23.25 km,电池SOC为37.6%,符合赛事耐久性要求。
3 方程式赛车动力传动系统参数匹配界面开发
从上述分析中可知,车辆动力传动系统中各参数不同,车辆所表现出的动力性也不同,因此需要对车辆的动力传动系统进行匹配。同时,车辆动力传动系统参数亦会随着车辆的状态变化而发生变化。因此,如果在设置不同的仿真参数时,对传动系统各个元件参数进行编辑,这比较麻烦,特别是当调整参数的人员与模型搭建人员不是同一人的时候,则会增加调参人员的工作负荷。同时,对于想要入门方程式车辆设计的人员以及一些业余爱好者,通过每个模块的调参让他们感受到传动系统的参数对车辆性能的影响则会增加他们的理解难度。因此,基于此仿真模型,开发一套简洁的参数配置分析界面,则可更便于调参人员进行参数调节,同时也可使赛车入门者和一些业余爱好者对赛车动力传动系统参数变化对其性能的影响有更加直观的认识。
基于此,本项目在所建立的方程式赛车动力传动系统参数匹配模型的技术上,开发出了方程式赛车动力传动系统参数匹配快速配置及分析界面。将动力传动系统参数匹配过程中各关键部件的关键参数进行提取,设置为可编辑参数,并将仿真结果进行实时显示,使得在参数改变的同时能实时观测到车辆性能的变化,所设计出的方程式赛车动力传动系统参数匹配快速配置及分析界面如图6所示。从图中可以看出,在可编辑界面处输入车辆参数,即可点击开始仿真按钮实现模型的仿真,并将模型仿真结果进行显示。
4 结语
本文主要内容设计是基于中国大学生电动方程式汽车大赛规则和针对电动方程式赛车进行半实物测试。本文研究主要内容总结如下:
a.完成了模拟大学生电动方程式赛车的模拟整车模型,包括电机模型、电池模型、驾驶员模型、控制器模型、车身模型以及NEDC循环工况。
b.利用该系统进行动力系统匹配分析与部件选择、控制与诊断算法设计。
c.经过实车测试验证该整车动力学仿真模型达到了动力传动系统参数匹配效果。
d.基于此仿真模型,开发了方程式赛车动力传动系统参数匹配快速配置及分析界面,提高了方程式赛车参数匹配的效率。
参考文献:
[1]柳玉升,李智强.基于动力性的增程式电动汽车动力参数匹配分析[J].汽车制造业,2021(3):19-21.
[2]代明兵.重型商用車动力传动系统参数优化设计及软件开发[D].重庆:重庆大学,2010.
[3]刘江红.纯电动汽车动力传动系统参数的匹配设计[J].汽车工艺师,2018(3):57-58+61.
[4]王建,林海英,大学生电动方程式赛车设计[M].北京:北京理工大学出版社,2022.
[5]陈垚光,毛涛涛,王正林,等,精通MATLAB GUI设计[M].3版.北京:电子工业出版社,2013.
作者简介:
于建,男,1999年生,助理工程师,研究方向为新能源汽车技术。
王东洋(通讯作者),男,1990年生,讲师,研究方向为新能源汽车传动系统开发与控制。
