超声波洁牙机引发飞沫流动的可视化研究
2023-08-23张帆赵津杨威舒海银何俊杰余晓燕朱显坤
张帆, 赵津*, 杨威, 舒海银, 何俊杰, 余晓燕, 朱显坤
(1. 贵州大学机械工程学院, 贵阳 550025; 2. 贵州大学医学院, 贵阳 550025; 3. 贵阳市口腔医院, 贵阳 550002)
近10年来世界范围内接连遭受到多次新发、再发重大传染病的威胁,许多研究证明气溶胶和飞沫对疾病的传播是一个潜在的途径[1]。在口腔诊疗过程中,常用的治疗器械超声洁牙机的使用会产生大量飞沫[2],这些飞沫通常含有有机颗粒物(患者牙体组织和牙石、牙菌斑)、患者血液、唾液及其他鼻、喉分泌物、牙科材料碎片等[3]。当患者口腔内隐藏、携带血液传播病毒或呼吸道传播病毒时,如结核杆菌病毒等[4],其产生的飞沫可构成严重的潜在危险。其通过通风系统扩散到室内环境引起多人感染肺结核[5]。在进行口腔洁牙时超声波高频振动治疗产生的大量飞沫含有细菌、病毒等微生物性粒子,具有潜在传染性和致敏性[6],但是这一问题常被忽略。
中外学者对室内人体打喷嚏时产生的口腔飞沫进行了广泛的研究,Harrel等[7]、Bennettd等[8]和De albuquer等[9]针对室内空气生物气溶胶污染的种类、影响空气微生物存活和衰亡的环境因素及普通颗粒物在室内的传播等问题展开了分析研究。魏方等[10]进行了咳嗽飞沫核携带病毒在空气中传播的人工模拟技术,可用于评估呼吸道传染病经空气传播能力的现场试验研究,研究的重点主要集中在利用数值模拟的方式对人体咳嗽时产生的口腔飞沫的传播进行预测。邢超杰等[11]用粒子计数器对牙周科诊疗过程中使用超声波刮治机所引发的气溶胶浓度和数量随时空的分布特性进行了现场测试,研究表明了牙科诊疗中气溶胶的浓度分布情况。在Xie等[12]和Parienta等[13]的建模研究表明,精确测量口腔中排出的飞沫的速度对于更好地控制感染和阻断病毒传播至关重要。而针对口腔诊疗中超声波高频振动治疗产生的飞沫的流动动态的可视化研究较少,如果可以将飞沫的流动动态可视化,直接观察到飞沫的扩散范围和飞溅高度并测算出飞沫的流动速度,对研制出更有效的飞沫吸附设备和指导牙科诊疗环境中感染控制政策和实践具有关键性的作用。
在成功使用单一相机和单一光源拍摄到口腔飞沫在空气中的流动的基础上,现针对超声波洁牙治疗中的实际情况,使用高速相机记录人体口腔模型内不同区域的牙齿在接受超声洁牙治疗过程中引发的飞沫的流动情况,并结合图像处理技术使得飞沫的流动情况可视化,然后使用粒子分析软件对飞沫的流动速度、流动轨迹、Y轴方向的位移变化、初始扩散角进行分析,为牙科诊室中飞沫吸附装置的研制提供数据参考。
1 材料与方法
1.1 拍摄主体的选择
首先对贵州省贵阳市口腔医院观山湖院区牙周科真实的超声洁牙过程进行了拍摄实验,实验时间为2022年1月11—13日,实验拍摄到飞沫流动情况如图1所示。从图1中可以发现高速摄像机记录下的飞沫流动画面,难以观察到其流动轨迹。相比对人体模型的拍摄,拍摄真实患者的治疗有以下几个原因会影响飞沫流动的捕捉。

图1 洁牙手术时产生的飞沫Fig.1 Droplets generated during scaling surgery
(1)光照强度及光照时间:一次完整的超声洁牙治疗大约需要30 min,飞沫的飞溅是随机的,所以需要强光持续照射预定拍摄区域,但这会使得医生出现眼花等情况,严重干扰了正常治疗。长时间的强光照射也会使患者的面部皮肤有灼烧感,只能间断性打开光源,所以总是错失拍摄时机。
(2)光源位置:如果光源的位置和高度一直处于固定位置时,会出现光源被医生的身体所遮挡的情况。所以需要人工手持光源,视情况调整光照。但是每一次光源位置的调整都需要耗费大量的时间重新对被拍摄区域进行对焦,以至于错失拍摄时机。
(3)画面视场:由于治疗时光照强度不足,实验拍摄时使用100 mm定焦的微距镜头,可以捕捉到飞沫的流动但是视场较小,无法记录飞沫的流动轨迹。使用24 mm的广角镜头进行拍摄,可以获得较大的视场,但由于光源位置的不固定、光源强度受限、医生的操作手的位置随时变化等因素,相机难以捕捉到飞沫的流动。
(4)背景复杂:由于获得的画面视场较小,飞沫运动时的背景较为复杂,飞沫的粒径较小且运动较为集中,无法突出飞沫的流动情况,对飞沫的运动分析也将无法进行。
相比于拍摄真实患者的治疗过程,以人体模型为拍摄主体可以解决在真实患者拍摄时遇到的问题,所以选用以人体模型为拍摄主体。
1.2 实验仪器与实验环境
1.2.1 超声波洁牙机
针对牙周诊疗中超声洁牙机引发的飞沫流动动态进行分析,选用啄木鸟牌USD-E型超声波洁牙机。超声波洁牙机是由高频振荡电路产生高频振荡信号并作用于超声换能器上,利用逆压电效应(或磁致伸缩效应)产生超声振动,工作尖受到激励产生共振,利用超声波产生的各种效应将牙齿表面的菌斑、结石或牙周表面的细菌等清除,同时工作尖流出清洗液对工作尖进行冷却并牙齿表面进行清洗[11]。由主机、手柄、工作尖、脚踏开关和电源适配器组成,是牙病防治工作的重要设备。
1.2.2 高速相机
在牙周科诊疗过程中超声洁牙仪引发的飞沫流动速度非常快,因此,实验使用高速相机来记飞沫的流动。为了保证拍摄到清晰的飞沫流动用于数据分析,需要获取高质量的飞沫流动图像。
相机根据芯片类型的不同工业相机可分为CCD相机和CMOS相机。CMOS图像传感器具有成本低、功耗低等优点,但CCD图像传感器在图像质量方面具有更好的性能,与CMOS相比,灵敏度更高[14]。综合考虑实际需求与后续的使用需要,选用高速相机(IDT Y4-S2)。
1.2.3 工业镜头
工业镜头是搭配工业相机实现图像信息获取的重要组成硬件,选择合适的镜头,是获取良好图像的前提。一般情况下,根据不同任务所要求的工作距离与视范围,能够选择合适焦距的镜头与之相匹配,镜头焦距的计算公式为
(1)
(2)
式中:f为镜头的焦距;D为镜头的工作距离;v为像元的纵向尺寸;h为像元的横向尺寸;V为镜头的纵向视野;H为镜头的横向视野。
结合实际拍摄需求最终选择的工业镜头为尼康24~85 mm变焦镜头,这个范围的焦段更能满足室内环境的拍摄,固定拍摄距离,变焦镜头相对于定焦镜头,可以多次调整焦段以获得最佳的拍摄视场。
1.2.4 光源
对单一飞沫流动的捕捉,光源的选择通常需要根据拍摄视场的具体要求、现场环境与项目预算等情况进行综合考虑。由于飞沫的流动速度快,相机设定的曝光时间短,因此需要选择特定类型的光源使得拍摄视场获得足够的光照,最终选用高亮度白光120WLED光源。
1.3 高速相机和光源的参数设置
实验拍摄时相机的分辨率为1 016 × 1 016像素,帧率设置为1 000帧/s、曝光时间为575 μs、单次拍摄时间为3 s,记录飞沫离开口腔后的高速视频。但是,在1 000帧/s的理想曝光时间下,如果相机垂直于光源,由于飞沫的米氏散射特性,单个光源的强度不足以捕捉到飞沫的流动[15]。为了克服这个问题,相机被放置在一个与光源照射方向不同的角度。另外,由于飞沫的高速运动,相机以一个固定的角度录制视频会导致透视失真。因此实验拍摄时相机固定在头模左侧,与头模中轴线成75°,处于光散射和透视失真水平之间的平衡。镜头中心离地高度为950 mm,镜头中心距离头模口腔中心点为1 450 mm,经过多次试验此布置为最佳拍摄角度,如图2所示。为获得较大的视场范围,记录飞沫较完整的流动轨迹,相机搭载尼康24~85 mm,最大光圈为F2.8的变焦镜头,拍摄时的镜头参数为:焦段35 mm。由于单一光源的能量有限,为保证充足的进光量来清晰地捕捉到飞沫,所以本文使用了镜头的最大光圈F2.8。LED灯固定在头模左侧方,与头模中轴线成90°,三脚架中心距离头模口腔中心点为770 mm,从高往下照射头模的口腔位置。

图2 拍摄角度示意图Fig.2 Diagram of shooting angle
1.4 实验条件及过程
根据预实验获得的数据显示,一次完整的超声洁牙治疗中,由于超声洁牙机引发且离开口腔的飞沫,其数量、流动速度、流动位移等均与超声洁牙仪的工作尖与牙齿的接触角度、超声洁牙仪的工作功率、水流量的设置密切相关。在同一牙齿上,工作尖与牙齿的接触角度也相同的条件下,当超声洁牙机的工作功率及流水量调至最高时引发的飞沫数量最多,飞沫的流动位移也最大。本文研究旨获取在超声洁牙治疗过程中产生的飞沫的流动轨迹、最大流动速度及最大位移变化等数据,为相关医用防护设备的研制提供参考。所以在实验过程中,医生手持超声洁牙仪对头模的口腔进行洁牙时超声洁牙仪的工作功率及流水量调至最高。实验将口腔内的牙齿分为6个大区,如图3(a)所示。将其腭侧、颊侧、咬合侧单独划分,其中一区和五区的咬合面过小所以不针对咬合侧,共计16个区域,如图3(b)所示。在预实验中,经过多次的试验获得了工作尖与各区域牙齿接触时,引发的飞沫飞溅距离最远的接触角度。接通水路,启动超声洁牙仪,操作员按照预实验中的操作方法对头模的口腔进行洁牙治疗,打开高速摄像机,依次捕捉这16个区域中的牙齿在接受超声洁牙治疗时产生的飞沫的流动。

图3 牙齿分区图Fig.3 Tooth partition
实验环境为标准的牙科独立诊室,室内为自然通风,诊疗区窗户微开,诊疗区与休息区相连接的门完全打开,工作期间未使用机械通风,室内温度变化区间为25~27 ℃,室内外相对湿度为40%~60%。
2 飞沫流动图像预处理与图像堆叠
2.1 飞沫流动图像预处理
在对飞沫流动的数据分析中,能够准确分割出无序流动的飞沫是研究的关键点之一。高速相机所采集到的图片,由于光线等环境因素的干扰,飞沫与背景的对比度不强且飞沫的粒径比较小,所以采集的原始图片不能直接地观察到飞沫的流动情况,如图4(a)所示。因此,为了较直观地观察到不同粒径的飞沫的流动情况需要对图像的视觉信息进行图像预处理为,目的是为了消除多余信息,增强图像信息的可检测性[16],突出飞沫的流动。

图4 高速相机记录下的飞沫流动Fig.4 Droplet flow recorded by high-speed camera
2.1.1 图像灰度化
相机拍摄的图片一般为 RGB 彩色图像,用RGB 3个分量,即红(red, R)、绿(green, G)、蓝(blue, B)三原色来表示真彩色,R分量、G分量、B分量的取值范围均为0~255。由于各种信息过于复杂,如果直接对彩色图像进行处理干扰信息太多,误差较大。图像灰度化处理可以作为图像处理的预处理步骤,为之后的图像边缘提取和图像分析等操作做准备,而灰度图像是R、G、B3个分量相同的一种特殊的彩色图像。图像灰度化处理有以下几种方式。
(1)分量法。将彩色图像中的3个分量R(i,j)、G(i,j)、B(i,j)的亮度作为3个灰度图像的灰度值,分别为Gray1(i,j)、Gray2(i,j)、Gray3(i,j),其中(i,j)为图像中像素点的横纵坐标,可根据应用需要选取一种灰度图像。
(3)
(2) 最大值法。将彩色图像中的3个分量R(i,j)、G(i,j)、B(i,j)的亮度的最大值作为灰度图的灰度值Graymax(i,j)。
Graymax(i,j)=max{R(i,j),G(i,j),B(i,j)}
(4)
(3) 平均值法。将彩色图像中的3个分量R(i,j)、G(i,j)、B(i,j)的亮度求平均得到一个灰度值Graymean(i,j)。
(5)
(4) 加权平均法。根据重要性及其他指标,如式(6)将3个分量R(i,j)、G(i,j)、B(i,j)以不同的权值进行加权平均。由于人眼对绿色的敏感最高,对蓝色敏感最低,因此,按式(6)对RGB 3个分量R(i,j)、G(i,j)、B(i,j)进行加权平均能得到较合理的灰度值Graywa(i,j)[17]。采用加权平均法并使用cvtColor函数对图像进行灰度化,获取灰度化图像,灰度图如图4(b)所示。
Graywa(i,j)=0.299R(i,j)+0.578G(i,j)+
0.114B(i,j)
(6)
2.1.2 二值化处理
图像的二值化处理就是将图像上的点的灰度置为0或255,也就是将整个图像呈现出明显的黑白效果。当把灰度值从0~255进行平均量化时,量化的份数就被称为灰度级数。若灰度级数为两级,即将256个亮度等级的灰度图像通过适当的阈值选取而获得仍然可以反映图像整体和局部特征的二值化图像,此时像素的色彩仅表现为最黑或最白。图像二值化是数字图像处理中的重要环节,经典的图像二值化方法包括全局阈值法、局部阈值法和动态阈值法等[18]。采用 Threshold函数对灰度图像进行全局阈值二值化后,得到二值化图像。
2.1.3 边缘检测
在图像处理中,图像中局部灰度值变化较大区域的像素集合被称为边缘,边缘检测的目的正是通过标识出该区域提取边缘信息。边缘信息提供了图像数据的合适概括,通过边缘提取,能够在保留图像中可用信息的同时去除大量的冗余信息。在本文中,对图像进行边缘检测是为了得到飞沫扩散的轮廓,以便于后续通过轮廓信息对飞沫的扩散范围进行测量。常用的边缘检测算子有,Roberts算子[19]、Canny子、Sobel算子[20]、Laplace算子[21]以及经典的Canny算子[22]。其中Sobel算子对噪声具有平滑作用,提供较为精确的边缘方向信息,是一种较为常用的边缘检测方法。Sobel算子结合了高斯平滑和微分求导,该算子包含两组3×3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值,即
(7)
(8)
式中:dx为水平方向;dy为垂直方向。
边缘检测后的图像如图5所示。
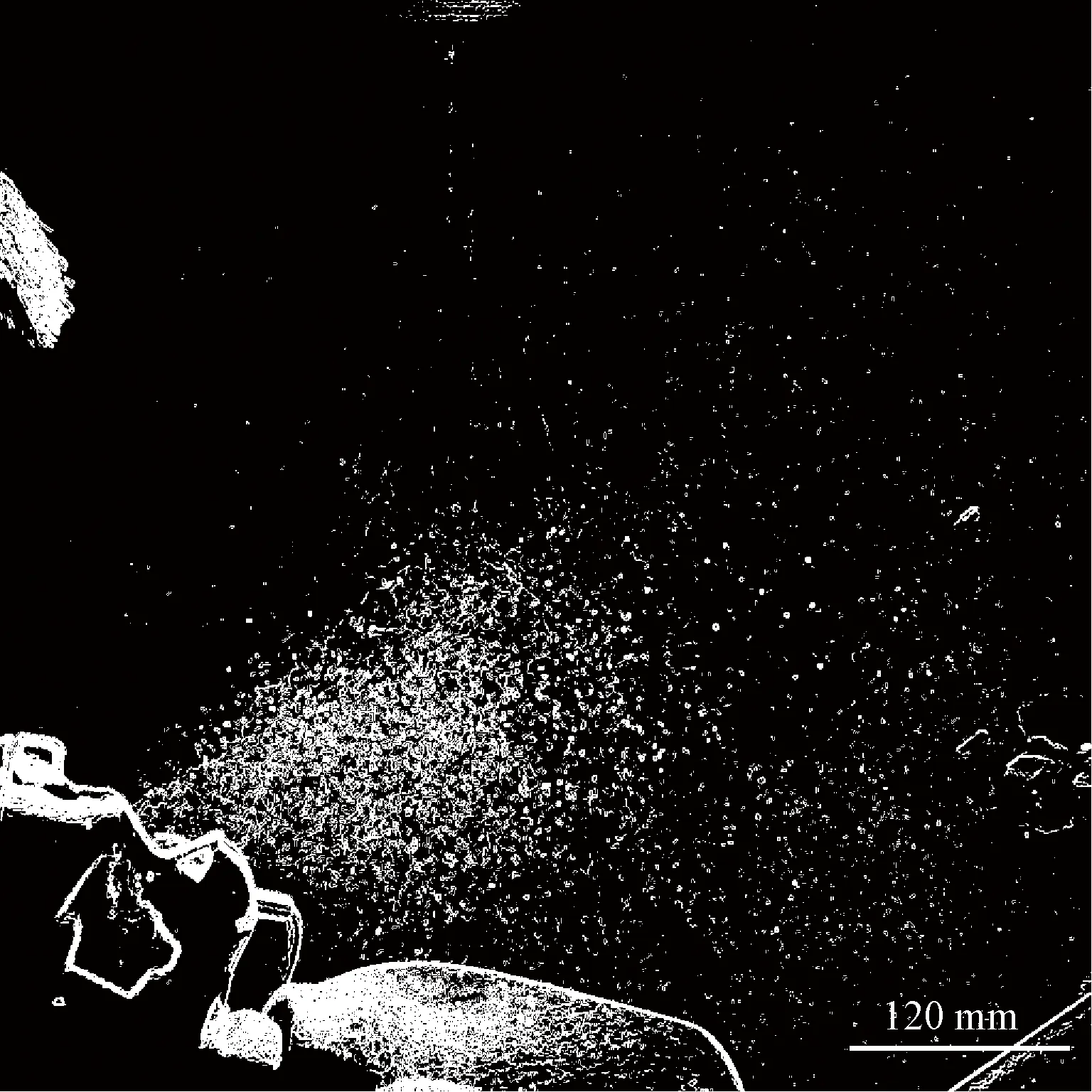
图5 边缘检测Fig.5 Edge detection
2.1.4 图像锐化
图像锐化是图像处理的一个重要环节,是对质量低的图像进行处理为后续的图像信息提取、图像识别等,提供更高识别度的图像。在图像的预处理过程中,图像的摄取、编码、传输等过程中有许多因素会使图像变模糊。如摄取过程中的聚焦不良,编码中的量化步骤使得图像的高频分量损失,处理过程中对图像进行放大时由于缩放算法具有低通滤波性质而导致图像变得柔和等。图像锐化正是针对这个问题对图像的边缘进行增强和高频分量进行补偿,图像锐化的目的是凸显物体的细节轮廓,视觉感受良好,为后续的处理提供具有更高辨析度的图像,常用的图像锐化方法有梯度法、Laplace算子和高通滤波,综合考虑后,采用梯度法对图像进行锐化。
2.2 图像堆叠
高速相机捕捉到飞沫流动后,所拍摄的每一张图片只能记录下飞沫的瞬时位置,以多张tif格式的图片进行保存,连续播放图片才可以观察到飞沫的流动轨迹。为了更加直观地观察到飞沫的运动轨迹,数据采用image j图像处理软件的KymographClear2.0模块对记录下的飞沫的连续流动进行堆叠合成出飞沫的运动轨迹图,调整图片的锐化和结构后使飞沫流动轨迹更加清晰。如图6所示分别为超声洁牙仪在口腔内对牙齿的16个不同区域进行治疗时所引发的飞沫的流动轨迹。数据表明超声洁牙机在不同牙齿区域内所引发的飞沫的流动轨迹大多为抛物线,在1区咬合侧、2区颊侧和2区咬合侧区域内引发的飞沫较其他区域而言,飞溅高度较高,飞沫的数量较多,飞沫的扩散面积较大。

1~6区的腭侧、颊侧和咬合侧,其中2区和5区不记录咬合侧图6 超声洁牙机针对不同牙齿区域治疗时产生的飞沫的运动轨迹Fig.6 Trajectory of droplets produced during ultrasonic scaling of different tooth areas
3 数据分析
3.1 飞沫测速及轨迹分析
相关飞沫吸附设备在吸附功率的设计上需要获得飞沫的流动速度进行匹配,合理选择吸附功率可以利用最低耗能使吸附效果最大化。采用image j图像处理软件对单一飞沫的流动进行追踪,首先对相机采集到的图像进行锐化、结构和去除噪声等预处理,单一粒子的流动更加清晰便于软件进行跟踪测速。然后将预处理后的飞沫流动的连续图片导入image j软件中,使用Manual Tracking功能,标定飞沫的初始位置(飞沫飞溅出口腔后的第一个位置),播放连续图片,依次捕捉同一飞沫在下一帧中所出现的位置,直到飞沫飞溅出画面后停止追踪。停止追踪后,软件系统通过飞沫每一瞬时的X、Y坐标参数以及相、每一帧的间隔时间,测算出超声洁牙机在牙齿各区域内所产生飞沫的最大流动速度如图7所示。第一,具有较明显运动轨迹的飞沫的粒径范围为0.5~5 mm,其中粒径较大的飞沫的初始流动速度较快。第二,如图6所示飞沫的流动轨迹多为抛物线形式,飞沫从初始位置流动至抛物线顶点的过程中流动速度逐步衰减。

图7 超声洁牙机在牙齿各区域产生的飞沫的最大流动速度Fig.7 Maximum flow velocity of droplets produced by ultrasonic dental cleaner in various areas of teeth
如图8所示,16个区域中飞溅高度最高的粒子,飞溅至最高点所耗费的时间均不超过0.275 s,速度均衰减至0.9~1.2 m/s。第三,如图7所示超声洁牙机在牙齿的16个区域内所产生的飞沫离开口腔时的最大瞬时流动速度不大于9 m/s,其中81%的区域所引发的飞沫的最大瞬时流动速度不超过8 m/s,88%的区域所引发的飞沫的最大瞬时流动速度超过5 m/s。第四,超声洁牙机在3区内侧、3区外侧和4区咬合侧所引发的飞沫的最大瞬时流动速度较大,在8~9 m/s的范围内。

图8 飞沫流动至最高点所需时间Fig.8 Time required for droplets to flow to the highest point
3.2 飞沫在X、Y方向的位移测量
超声洁牙机所产生的飞沫在Y方向上的最大飞溅高度和飞沫流动至最高点时的水平位移对吸附装置的安装位置的设计具有十分重要的意义。通过飞沫流动轨迹图,可以清晰地观察到飞沫的最大飞溅高度的位置。利用image j图像处理软件,依次导入流动轨迹图,设置标尺,使用Measure功能设定上嘴唇为原点,以流动轨迹的最高点为终点,即可测量出超声洁牙机在牙齿各区域所产生的飞沫在Y方向上的最大飞溅高度如图9所示,流动至最高点时的水平位移如图10所示。

图9 飞沫流动至最高点时X方向上的位移Fig.9 The displacement in X direction when the droplets flow to the highest point

图10 飞沫流动至最高点时Y方向上的位移Fig.10 Displacement in Y direction when droplets flow to the highest point
第一,粒径越大的飞沫在Y方向上的飞溅高度越高,流动轨迹越明显;第二,超声洁牙治疗过程中,牙齿的16个区域内所产生的飞沫,飞沫在Y方向距口腔上嘴唇的最大位移不高于450 mm;第三,其中63%的区域内所产生的飞沫,飞沫在Y方向距口腔上嘴唇的最大位移不高于300 mm,38%的区域内所产生的飞沫,飞沫在Y方向距口腔上嘴唇的最大位移不高于200 mm;第四,飞沫流动至轨迹最高点时,距离口腔上嘴唇的最大水平位移不高于700 mm;第五,超60%的区域内所产生的飞沫在最高点时的水平位移为50~450 mm。
3.3 飞沫初始扩散角测量
超声洁牙机所产生的飞沫其初始扩散角度的数据,对吸附装置的吸附口的大小及形状等参数的设计具有十分重要的价值。将各区域的飞沫流动图片经过2.1节中的图像预处理后,可以较直观地观察到飞沫的流动情况和初始扩散角。利用image j图像处理软件,依次导入预处理后的各区域飞沫的流动图片,使用Angle tool功能如图11所示绘制出飞沫的初始扩散角后即可进行测量,测量数值如图12所示。第一,超声洁牙机在牙齿的16个区域内所产生的飞沫,其初始最大扩散角不大于170°;第二,75%的区域内所产生的飞沫的初始最大扩散角不大于140°,25%的区域内所产生的飞沫的初始最大扩散角不大于80°;第三,超声洁牙机所产生的飞沫其初始扩散角集中在90°~170°。
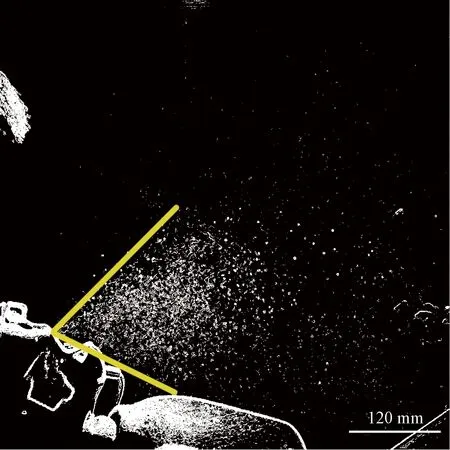
图11 飞沫的初始扩散角测量Fig.11 Measurement of maximum velocity diffusion angle of droplets
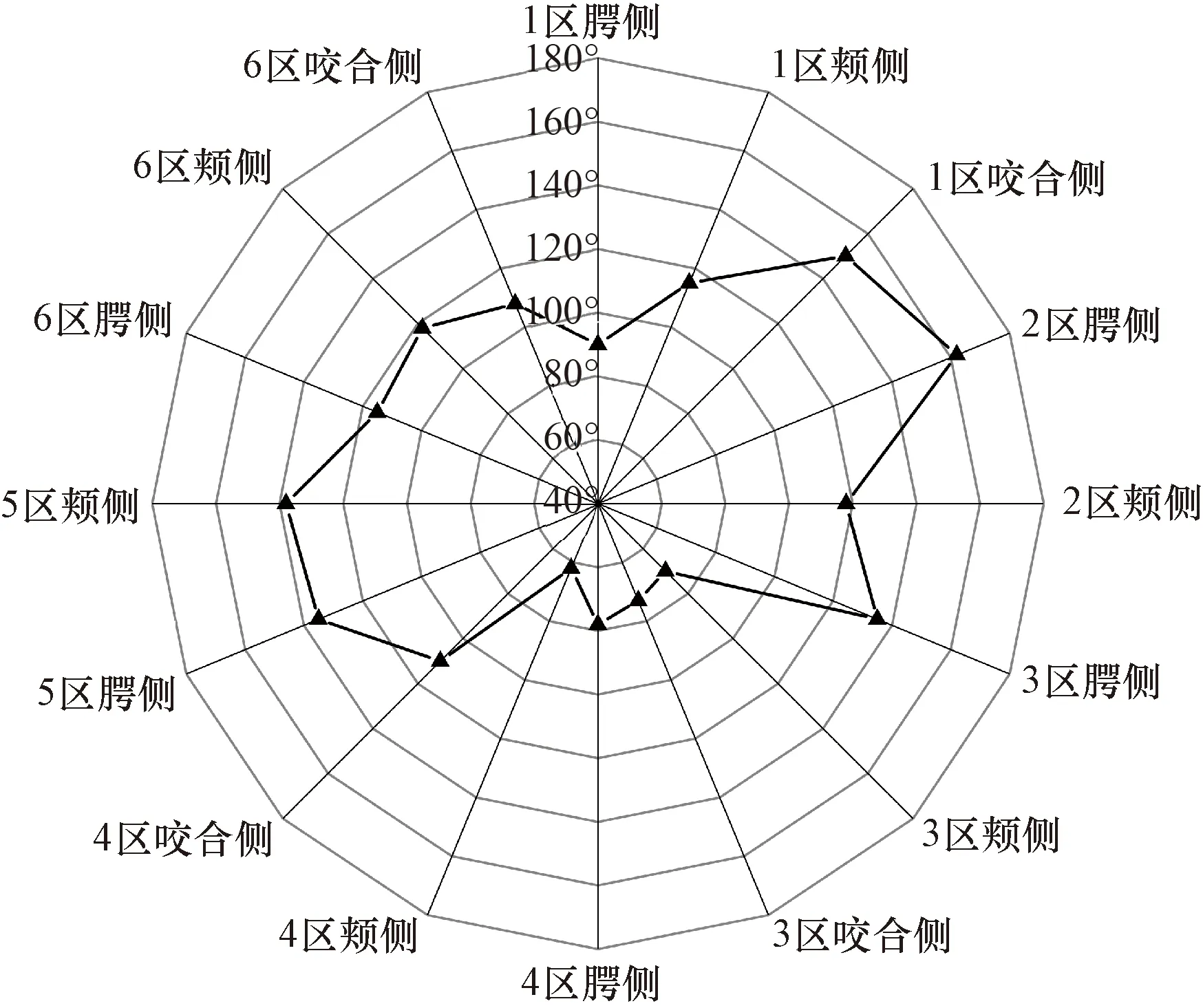
图12 超声洁牙机在牙齿各区域产生的飞沫的最大扩散角Fig.12 Ultrasonic tooth instrument produced in each area of the tooth maximum diffusion angle of droplets
4 讨论
相比于其他的牙科治疗,超声波洗牙产生的气溶胶和飞溅物最多,可以传播到离手术部位相当远的地方[23]。研究表明,不使用冷却剂的超声洁牙机仍然可以产生大量的气溶胶和飞溅物,大部分的牙科手术都会造成一定程度的黏膜损伤,这是较难避免的[24],因此应该把每个病人都当作潜在的传染源。本文研究使用单一相机拍摄结合图像处理的方法成功记录到超声波洁牙过程中产生的飞沫在空气中的流动,为研究超声波洁牙过程中引发的飞沫在空气中的流动动态提供了一种可视化方法。在实验过程中选用人体模型为拍摄对象,操作员手持超声洁牙仪对头模的口腔进行洁牙时超声洁牙仪的工作功率及流水量可以调至最高,并且可以经过多次的试验记录到飞沫的最大流动速度、飞沫的初始扩散角度和飞沫的最大飞溅高度的极大值,这为针对牙科诊室传染病的防护及相关吸附消杀设备的研制提供了强有力的数据支持。
尽管不同诊室的空间高度、建筑面积以及诊室内的设备摆放[25]、空调的安装位置、送回风口的大小、风速、人员的流动等因素均会对空气的流场有所影响[26]。但是本文研究中所展示的试验结果为在自然通风条件下超声洁牙机产生的飞沫在空气中的流动数据的极大值。随着技术的发展,大量的仿真与数学计算为传染病的模拟仿真提供了有利条件[27]。使用该数据设置为飞溅物的初始流动值,利用CFD数值模拟软件在计算机中建立不同的诊室环境并添加不同粒径的飞溅物,可以对超声波洁牙过程中产生的飞沫在不同环境条件诊室中的传播能力进行深一步的研究。此外,本文研究中提出的飞沫传播可视化方法,也可用于研究牙科手术中其他医疗器械所产生的飞沫流动。目前对于牙科手术中产生的飞沫的吸附消杀设备的研制还处于起步阶段,吸附及消杀的效果、医生的可操作性、患者的感受等因素都需要仔细分析,研制出吸附消杀能力强并符合人机工程学的医疗防护设备对防止疫情和流行疾病的蔓延、保障口腔疾病患者和医务人员的诊疗安全具有重要的意义。
5 结论
提出了一种使用单一相机拍摄结合图像处理使得口腔飞沫的传播可视化的方法,分析了超声波洁牙治疗过程中引发的飞沫在空气中的流动动态,得出以下结论。
(1)飞沫离开口腔后粒径不同飞沫混合成团状向外飞溅,在一定距离内飞沫浓度较高,随后粒径较小的飞沫被空气稀释浓度降低有上升趋势,而粒径较大粒子的在X轴方向飞溅距离较远一些且呈下降趋势。
(2)超声洁牙机在不同牙齿区域内所引发的飞沫的流动轨迹大多为抛物线,在一区咬合侧、二区颊侧和二区咬合侧区域内引发的飞沫较其他区域而言,飞溅高度较高,飞沫的数量较多,飞沫的扩散面积较大。
(3)超声洁机在牙齿的16个区域内所产生的飞沫在离开口腔时的最大瞬时流动速度不超过9 m/s,在3 s内均衰减至0.9 ~1.2 m/s。吸附装置的最大功率设计可以参考粒径为5 mm,流动速度为9 ~10 m/s的球形水滴的动能进行匹配。
(4)超声洁机在牙齿的16个区域内所产生的飞沫,飞沫在Y方向距口腔上嘴唇的最大位移不大于450 mm,飞沫流动至轨迹最高点时,距离口腔上嘴唇的最大水平位移不高于700 mm。
(5)超声洁牙机在牙齿的16个区域内所产生的飞沫,其初始最大扩散角不大于170°,75%的区域内所产生的飞沫的初始最大扩散角不大于140°。
本文中提出的飞沫传播可视化方法,也可用于研究牙科手术中其他医疗器械所产生的飞沫流动,研究结果可为牙科诊室中飞沫吸附装置的研制提供数据参考。