一种基于PLC控制的机械手液压系统设计
2023-08-23叶青青
叶青青
(天门职业学院,湖北天门,431700)
1 设计需求
机械手是一种能够自动抓取和搬运的机械装置,可根据具体工艺要求完成各类复杂动作。机械手可基本代替人工操作,不仅能够减少人工成本,还可提升工业生产效率,从而加快制造业自动化进程。随着现代技术的飞速发展,机械手在制造业中的作用日渐显著,已成为制造业的重要构成[1]。但在具体应用中,普通机械手缺少自动调节与传感器反馈能力,难以检测外部环境或工作位置的改变情况,易使机械手出现损坏情况[2]。此外,在工业生产中通常使用气动机械手,因气压传动输出功率较小,导致气动机械手仅能在输出负载小的工作中使用。鉴于这些问题,拟设计一种基于PLC控制的机械手液压系统,该系统既可抓取、搬运并放下物体,且输出功率大,能够代替人工劳动,实现生产自动化的目标。通过系统的设计、仿真分析以及测试可知,该系统能够基本实现自动抓取、搬运以及运行稳定等要求,具有显著的应用价值。
2 系统整体架构设计
本系统可控制机械手进行上升、前伸、抓取、回转、下降、松开、复位等操作,系统整体包括液压控制系统、电气控制回路、软件、各类传感器等,本设计采用多个软件与传感器对机械手在运行中的位置进行监控,具体如图1所示。

图1 机械A手液压系统架构
3 控制系统设计
本系统机械手采用液压驱动,通过液压缸完成机械手臂的收缩、抓取、升降等操作,具体工作形式如图2所示。根据工作要求,机械部分由手臂的升降、伸缩、回转等模块组成,各模块均由液压缸来驱动控制。机械手的动作循环过程为:上升→前伸→抓取→回转→下降→松开→复位→停止。在机械手液压系统中,液压缸的组成包括:回转—单叶片摆动缸;升降—单缸液压缸[3];伸缩—单缸活塞液压缸;抓取—无杆活塞缸。液压系统整体设计过程会涉及诸多液压元件,例如单向阀、控制阀、传感器、开关等。

图2 机械手液压控制系统
■3.1 控制核心选择与输入/输出分配
机械手液压系统控制核心为PLC,本设计选择S7-300,并结合设计实际情况对输入/输出接口进行分配,具体如表1所示。
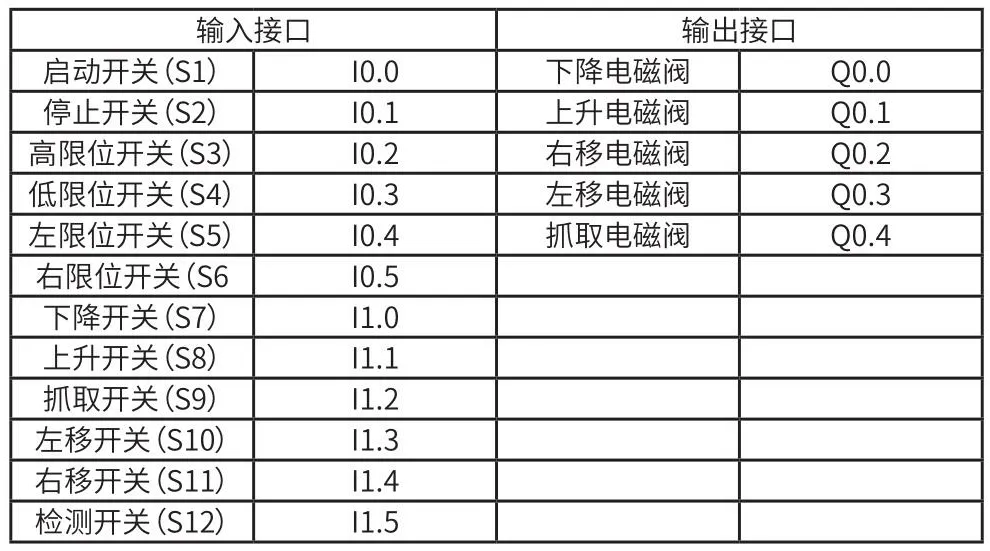
表1 输入/输出接口分配
■3.2 外部接线
根据S7-300的输入/输出接口分配情况及现实工作实际,设计出具体的S7-300外部接线图,如图3所示。

图3 S7—300外部接线图
■3.3 运动顺序
(2)前伸。机械手的前伸由三位四通电磁阀控制,当3YA得电后,三位四通电磁阀右位工作,液压缸右移动,使机械手做前伸动作。油路连接包括进油路与回油路,进油路流程表示为:液压源→单向阀→右位电磁阀→液压缸左腔→液压缸右移;回油路流程表示为:液压缸右腔→调速阀→右位电磁阀→油箱[5]。当1YA得电后,二位四通电磁阀右位工作,完成机械手的松开动作,油路连接包括进油路与回油路:进油路流程表示为:液压源→单向阀→右位电磁阀→液压缸左腔→液压缸下移;回油路流程表示为:液压缸下腔→右位电磁阀→油箱。

表2 机械手动作顺序
■3.4 工作流程
(5)松开后复位。当1YA失电后,活塞向下移动,使机械手做松开动作。此时,当6YA得电后,三位四通电磁阀右位工作,机械手开始回转[6]。机械手复位动作由三位四通电磁阀控制,当2YA得电后,三位四通电磁阀左位工作,液压缸向左移动,从而让机械手缩回。油路连接包括进油路与回油路,进油路流程表示为:液压源→左位电磁阀→调速阀→液压缸右腔→液压缸左移;回油路流程表示为:液压缸左腔→左位电磁阀→油箱。此时,当6YA得电后,机械手依然处于回转状态,当6YA失电后,三位四通电磁阀左位工作,马达顺时针运转,进而完成反转动作。
为了确保机械手能够按照设计动作进行操作,控制液压缸的电磁阀应根据特定顺序依次完成动作,分析机械手的动作过程可得到其动作顺序,具体如表2所示。
保护区建设要从流域的整体性和系统性出发,充分论证生境和物种保护必要性。目前,已在长江流域分批建设了众多的水产种质资源保护区和湿地保护区,一些保护区的保护目标和对象针对性不强,或涉及范围过大,效果不明显。一旦列为保护区范围,任何涉水的社会经济活动都将受到严格限制。因此,需开展现有保护区的保护需求与效果的科学评估,以促进重要保护区的保护管理,确保其发挥作用,并有必要调整、清退一些作用不大的保护区。
根据机械手动作顺序进行电气回路设计,具体如图4所示。在机械手液压系统中,电气控制主要通过开关、继电器、电磁铁、传感器进行调节。(1)上升:按下T1,K1得电且常开触点闭合,处于初始位置的S1被按下,5YA得电,使机械手进行上升;(2)前伸:当机械手上升到一定高度时会触碰S4,1YA与3YA得电,此时K2也会得电且常闭触点断开,导致5YA失电,由此完成机械手的前伸与松开动作;(3)抓取后回转:当机械手前伸到一定位置时会触碰S2,K3、K4得电且常闭触点断开,使1YA与3YA失电,从而让机械手抓紧工件[7]。当K4常开触点闭合、B2感应到机械手抓紧工件时,K5得电且常开触点闭合,6YA与K6得电,由此让机械手进行回转;(4)下降。当K6常开触点闭合后,4YA得电,机械手做下降动作;(5)松开后复位:当机械手降至一定位置后会触碰S3,此时K7得电且常闭触点断开,分别使4YA与K3失电,使1YA二次得电,机械手做松开动作。当K7常开触点闭合、B1感应到机械手松开工件时,K8得电且常开触点闭合,2YA与K9得电,K9常闭触点断开,使1YA失电,由此完成机械手复位动作。
当工件被输送带传送过来后,限位开关闭合控制工件到位,机械手从原点开始下降,当降至最低时会触碰下限位开关,下降停止并接通夹紧电磁阀夹紧工作[8]。上升电磁阀通电后机械手开始上升,至一定高度后会触碰上限位开关,此时上升停止并向右移动,当触碰右限位开关后下降,触碰下限位开关,此时下降电磁阀与夹紧电磁阀断电,机械手松开工件后开始上升,当触碰到上限位开关后左移,当移动至原点后触碰左限位开关,左移电磁阀断电后复位。至此,机械手搬运工件的过程便结束。机械手完成这些动作是通过液压系统进行驱动,先采用S7-300控制电磁阀,并用电磁阀所控的液压系统驱动机械手运动,系统软件设计流程如图5所示。
(1)上升。机械手上升动作由三位四通电磁阀控制,当5YA得电之后,三位四通电磁阀右位工作,液压缸开始上升,从而让机械手上升[4]。油路连接包括进油路与回油路,进油路流程表示为:液压源→单向阀→右位电磁阀→调速阀→液压缸下腔;回油路流程表示为:液压缸上腔→调速阀→右位电磁阀→油箱。因液压缸上升速度受调速阀所控,所以其运动比较平稳。
4 电气回路设计
(4)下降。机械手下降动作由三位四通电磁阀控制,4YA得电之后,三位四通电磁阀左位工作,6YA同时得电,液压缸向下移动,从而让机械手下降。油路连接包括进油路与回油路,进油路流程表示为:液压源→单向阀→左位电磁阀→液压缸上腔→下降;回油路流程表示为:液压缸下腔→顺序阀→左位电磁阀→油箱。
(3)抓取后回转。当1YA失电后,活塞向上移动,使机械手做抓取动作。机械手回转动作由三位四通电磁阀控制,6YA得电之后,三位四通电磁阀右位工作,马达逆时针运转,从而让机械手回转。油路连接包括进油路与回油路,进油路流程表示为:液压源→单向阀→右位电磁阀→马达左腔→回转;回油路流程表示为:右位马达→右位电磁阀→油箱。
病房里传来楼兰的声音,是西双来了么?声音跳跃着,仿佛有了闪烁和微笑的表情。老人和西双走进去,老人说西双借给我们三万块钱。楼兰就愣住了。她看着西双,两滴眼泪突然涌出,却挂在眼角,挣扎着不肯落下。她把眼泪蹭上被子,又轻轻揭开被角,伸出惨白纤细的手。她的指尖颤抖着,她说西双,我能握握你的手吗?

图4 机械手液压系统电气回路
5 软件设计
健身性:在裕固族传统体育项目中不乏此类项目,例如:顶杆子、拉爬牛等都对身体素质有着严格的要求;摔跤、拔腰等对人的思维同样有积极地作用,这是一种智慧的体现,并不是意味的蛮力。在各民族中,人们在漫长的社会生产劳动实践中逐步产生、发展各具特色的锻炼手段。

图5 软件设计流程
6 系统仿真
根据运转要求在ADI LTspice上绘制机械手液压回路与电气回路,并对其进行系统仿真。结果表明,本系统能够满足机械手的运转要求,并按照运转顺序进行连续动作。在此仅以机械手回转为例来对仿真过程进行验证,具体如图6所示。当按下T1时,K1得电且常开触点开始闭合,同时触碰S1,5YA得电,电磁阀右位工作,液压缸向前移动,机械手上升。当机械手上升到一定程度时,按下S4,此时1YA、3YA得电,电磁阀右位工作,液压缸下降,机械手松开。同时,K2得电且常闭触点断开,此时5YA断开,电磁阀常态化工作。当机械手前伸触碰S2,使K3、K4得电。K3、K4常闭触点断开,使1YA与3YA失电,电磁阀常态化工作,液压缸向上移动,机械手抓紧。当K4常开触点闭合、B2感应到机械手抓紧工件时,K5得电且常开触点闭合,使6YA得电,电磁阀右位工作。当液压缸伸出后即可实现机械手的回转。
就每一螺旋的具体呈现方式而言,多个版本“平行四边形概念”在第三学段的引入素材与第二学段在生活范围上差异不大,有些版本在不同学段引入素材的选取中存在重复现象(如使用了名称相同的素材),值得商榷.对于“性质1”的发现,人教版在第二和第三学段的编写所体现的思维要求无明显差异,在八下经由对具体平行四边形图形的观察和度量发现性质,就初中生而言,思维水平要求偏低.冀教版在第一和第二学段均有“平行四边形性质1的发现”,但第一学段就编写“平行四边形的对边相等”,超出了“直观水平”的要求,与学生的实际认知水平可能存在差异.

图6 机械手液压系统仿真
7 系统测试
在ADI LTspice上根据仿真图与元件明细选择并安装元件,根据进油路与回油路对其连接,连接时务必要仔细,不可出现漏接或错接的问题。同时,根据PLC控制图做好电路连接,完成回路组装,在确定连接无误后运行系统并开始进行测试。测试结果表明,本系统能够在ADI LTspice上模拟动作过程,实现了机械手臂上升、前伸、抓取、回转、下降、松开、复位等多个动作流程,并可循环进行工作,基本实现了设计的目的与要求。与传统驱动相比,本系统控制具有传递功率高,传动平稳性强等优势。
11月12日,中国海洋石油集团有限公司对外宣布,我国首个深水自营大气田——陵水17-2气田正式进入实质性开发建设阶段,建成投产后将供气给香港、广东及海南。陵水17-2气田位于南海琼东南盆地深水区的陵水凹陷,平均作业水深1500米,项目总投资额超过200亿元,储量规模超过1000亿立方米,于2014年由我国自主设计和建造的第一座深水钻井平台——“海洋石油981”勘探发现。该气田最快有望于“十三五”末期投产,每年生产30亿~35亿立方米天然气。
8 结语
综上所述,液压机械手目前已被广泛应用于制造业领域。对机械手液压系统进行设计,讨论液压机械手要实现的功能,并对机械手臂伸缩、升降、夹紧、回转等动作进行分析。系统测试后进行分析可得出:(1)本系统采用电磁阀转向,与PLC控制结合,具有操作便捷及自动化程度高等特点;(2)本系统通过单杆液压缸驱动机械手运动,由单向阀控制其速度,同时通过回油路节流调速,运动较为稳定;(3)本系统通过立式液压缸控制机械手臂升降,为支撑部件自重,回路由采用平衡回路,能够避免机械手速度过快或失控下滑;(4)为了使抓取工件后不受波动影响,并且为了能够保证抓紧工件,回路采用失电抓取来控制,这样能够提供更为安全可靠的工作状态。本系统应用多样化,可将其应用到各行业的工件、物料搬运或堆垛作业,例如冶金、建材、机械制造等。
