基于TRIZ的温室大棚机器人监测系统设计
2023-08-22黄曼绮
黄曼绮,王 旭
(电子科技大学成都学院计算机学院,成都 611731)
0 引 言
随着计算机技术、无线传感技术、现代通信技术的高速发展。现代设施农业领域的技术应用日趋完善,为温室大棚内部的农作物提供了优质的生长环境,促进了农作物产量和品质的提升[1-3]。因此,研究温室大棚现代设施农业技术具有良好的经济价值。
目前国内的农业技术现状来看,主要存在两种方式:①现代设施农业设施技术的开发与应用;②传统的农业耕作方式。对于现代设施农业而言,其核心技术之一是温室大棚无线传感监测系统[4-6]。近年来,国内众多高校以及研究机构对现代智慧农业技术开展了大量的研究。赵继春等[7]为解决传统设施农业内部复杂的线路布局问题,以ZigBee 无线通信技术为基础,STM32 为主控系统,并采用MC35i GPRS无线通信模块,开发了温室大棚无线传感系统,实现了设施农业数据的云端采集和系统的低丢包率效果;李明等[8]选择S3C2440 为主控制芯片,利用Mini2440 开发板,实现了温室大棚内部数据的接收和分析功能,该系统除传统的温湿度、光照度、二氧化碳等参数监测外,还考虑到了对恶劣气候下,温室大棚的幕布破损情况进行监测;毕然等[9]以面向形象设计法为基本原理,构建了温室大棚的模糊控制数学模型以及温度控制模型,提升了控制系统的效率,并确保了系统的高精度控制和高稳定性。从上述现代设施农业的监测系统研究情况来看,高精度参数监测、高效控制以及智能化的趋势日趋完善。但设备采用的元器件较多,系统成本较高,而对于传统的人工耕作模式而言,虽然其比例逐渐减少,但是仍有约40%的种植方式采用传统人工作业形式[10]。该模式存在成本低的优点,但人工种植方式也存在天气因素影响大、周期长、农作物产量和品质无法稳定输出的问题。所以,改进现代农业技术的同时也造成了成本过高的问题,而节约成本的模式,又造成农作物的产量和品质下降的问题,故这两种模式构成了一对技术矛盾。
鉴于以上问题,本文采用基于解决技术矛盾的萃智发明原理(Teoriya Resheniya Izobreatatelskikh Zadatch,TRIZ),采取合理的技术方案,开发一种温室大棚监测系统,在为农作物提供最优生长环境的同时,解决成本较高的问题,并以10 d 为周期的环境参数测试验证系统对温室大棚内部环境的监测精度。也为后续进一步的性能测试和优化改进提供数据支撑。
1 温室大棚环境监测系统优化方案的提出
1.1 TRIZ发明原理概述
TRIZ 是一种以技术矛盾解决方案的统计学为基础,对系统设计中存在的矛盾进行解决,并最终获得解决矛盾的最佳方案,即矛盾解决理论[11]。对于温室大棚的监测系统设计而言,当实现某些参数的优化或系统的改善时,必定造成系统其他方面的恶化。因此,上述改进因素以及恶化因素便组成了对应的技术矛盾。应用TRIZ就是为了解决该矛盾的对立面,求得系统的最优解。TRIZ的操作流程如图1 所示。

图1 TRIZ操作流程
1.2 技术矛盾矩阵的构建
对于温室大棚内部农作物种植而言,若要精确监测和调控农作物的生长环境,则最终的结果是农作物的产量和品质得到了较大的提升,即实现了结果的优化(改进参数)。但是,为了实现这一目标,系统需要较多的无线传感器来采集数据,同时需要搭建用于庞大数据传输的网络通信平台,其结果是提升了经济成本,却造成了经济效益的降低(恶化参数)、同时增加了系统的复杂程度以及维护的难度。因此,无线传感系统的搭建和成本的提升、系统复杂性的提升、设备维护难度的增加,构成了技术矛盾。同理,如果选择人工种植的方式,从种植经济成本的角度来看,无疑是成本最低的。但其结果,则是农作物的产量和品质下降。所以,成本的优化和农作物的质量下降,又构成了一组技术矛盾。
在TRIZ中,为了实现不同领域技术矛盾标准化的目标,方便实现普适性的解决方案,该原理确定了39 个通用工程参数[12]。监测系统优化设计的第一步,便是在这39 个通用工程参数内,选取合适的工程参数与引起技术矛盾的要素进行对应,即将监测系统的具体矛盾要素转换为通用工程参数。对于温室大棚种植方案而言,根据上述分析可知,搭建无线传感系统,优化的性能转换成通用工程参数为系统的生产率和自动化程度。而恶化的性能转换为系统的复杂性、物质的量以及系统的可维修性等通用工程参数。具体的参数变换情况,如表1 所列。

表1 通用工程参数转换
将表1 所示的通用工程参数,构建对应的技术矛盾矩阵,如表2 所示。其中,表中的数字为TRIZ 发明原理所推荐的设计方案。

表2 技术矛盾
1.3 系统设计方案的确定
由表2 可见,每一种矛盾都有多种解决措施。因此,需要结合系统的实际情况对各发明原理进行分析和采纳。其中,表2 中所示的发明原理,按照解决该矛盾的概率大小进行先后顺序编排。在具体的方案选择中,由于表提出的方案较多,限于篇幅,本文仅选取生产率、自动化程度以及系统的复杂性之间的技术矛盾解决方案进行分析说明。
为解决生产率和系统复杂性之间的矛盾,TRIZ提出了12(等势原理)、17(空间维数变化)、28(机械系统替代)以及24(借助中介物)这4 种解决方案。结合温室大棚的特点,分别对应的解决方案如表3 所示。

表3 生产率与系统复杂性技术矛盾解决方案
同理,再分析自动化程度和系统复杂性这对技术矛盾的解决措施。考虑到表2 所示的推荐方案10(预先作用原理)与本系统的特点不匹配,无法根据该原理提出监测系统的预作用设计方案,故最后确定技术矛盾的改进参数方案为:15(动态特性)、24(借助中介物)。再综合矩阵中其他技术矛盾的解决方案推荐,生产率与系统复杂性的具体方案情况为:在温室大棚里面设计一个移动机器人(24 借助中介物),对大棚环境参数进行动态监测(15 动态特性),为了实现参数监测的均匀性(12 等势原理),在温室大棚中按照规划的路劲设置滑轨(28 机械系统替代),引导机器人沿滑轨运行并在指定点完成数据采集。该移动机器人监测系统的方案,替代了原系统多点布置无线传感器的系统设计思路。机器人仅需要携带少量传感器便能够进行数据采集,大大降低了成本,解决了生产率、自动化成都和物质的量的矛盾;同时,机器人运行路径设计滑轨,进一步降低了系统的复杂性和可维修性,解决了自动化程度和系统复杂性、可维修性之间的技术矛盾,达到了预期的效果。
2 系统的设计
2.1 系统的布局
根据TRIZ发明原理得到了温室大棚移动机器人设计方案,实现该系统的设计。按照该方案,需要在温室大棚内部设置一个均匀的轨道,引导机器人运行,构建系统的三维模型,如图2 所示。
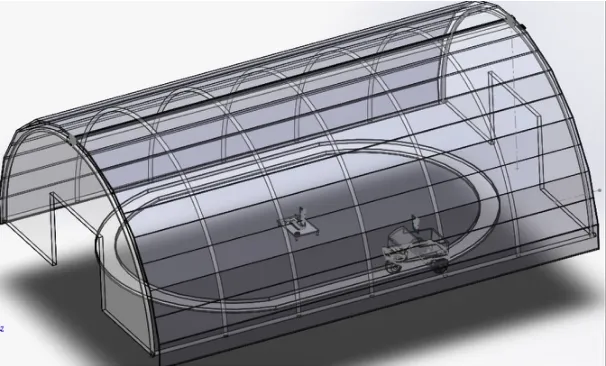
图2 移动机器人运行和轨道三维模型
从系统的基本功能来看,主要是实现温室大棚内部的环境参数监测及调控。故系统的基本模块包括主控制器模块、各环境参数检测模块以及移动机器人模块等,系统模块的整体布局如图3 所示。

图3 系统整体布局
2.2 硬件设计
温室大棚移动机器人监控系统的硬件设计,主要包括机器人的基本结构、温室大棚内部移动的驱动模块以及辅助循迹的红外模块等。机器人的三维实体模型如图4 所示。在驱动模块的设计中,考虑到移动速度的准确控制和无级调速,控制电动机的类型确定为直流电动机。驱动模块选择为L298N[13]。移动机器人以STM32 为主控制器[14],其系统电路如图5 所示。
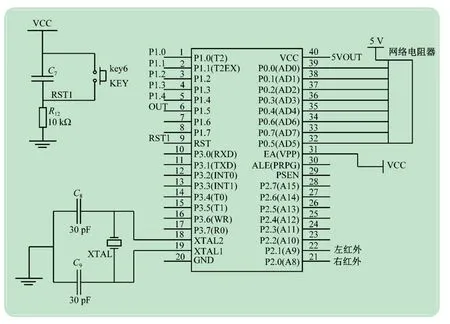
图5 主控系统电路
2.3 软件设计
为使机器人沿着设定轨迹运动,本文进行了软件设计:采用黑色轨道,应用红外传感器可识别路径并驱动机器人移动;在某些特殊情况下,也可使用智能手机来操作设备。系统软件的主要程序流程如图6 所示,图中x,y为移动机器人的位置坐标,x0和y0分别为移动机器人在x和y方向的初始坐标,y0=110。

图6 系统软件运行流程
3 系统性能测试
较之于传统的无线传感系统静态测试,温室大棚移动机器人监测系统的测试效果,也是验证TRIZ 发明原理推荐的技术矛盾解决方案是否合理的关键。其核心问题归纳为:与多点布置的无线传感系统相比,移动机器人的测试数据是否准确;二者的精度偏差是否稳定[15]。由此,本文对系统的性能进行了测试。设立的步骤为:①建立一个3D打印的模拟温室大棚模型;②以10 d为周期,分别进行静态和动态的环境参数数据采集;③比较二者之间的偏差,验证测试精度。限于篇幅,本文仅以光照度为例,测试的具体结果如图7所示。

图7 光照度测试数据对比
由图的测试数据比较可知:
(1)与传统的无线传感器静态测试结果对比。移动机器人测试系统的测试结果与静态测试结果存在一定的偏差。整体而言,移动机器人测试的动态数据要明显高于无线传感器静态测试的结果。
(2)从偏差状况比较。二者的偏差值基本稳定。因此,在采用移动机器人进行温室大棚环境监测系统的数据采集时,需要对测试的数据进行修正。以光照度为例,修正值设定为-60 lx 较为合理。如此一来,最终获得的测试结果就可以确保在一个比较高的精度范围内,基本能够满足系统的使用。
综上所述,本文根据TRIZ 的推荐方案设计而成的温室大棚移动机器人监测系统,测试精度基本能够满足要求,性能良好。且该设计方案在提升生产率和自动化程度的基础上,可以有效解决传统无线传感系统成本高、系统复杂以及维护困难等问题,即比较良好地解决了该技术矛盾,达到了预期目标,该设计方案也获得2 项[16-17]发明专利授权。
4 结 语
本文主要采用TRIZ对温室大棚机器人监测系统进行优化设计,并开展了以10 d 为周期的环境参数测试试验研究。通过对试验数据的分析结果表明,移动机器人测试结果均高于静态测试值;每天的测试值偏差基本保持在60 lx左右的范围。因此,可以通过修正机器人动态采集的数据,来提升温室大棚环境监测数据的精度;并利用TRIZ的推荐方案,能够有效解决温室大棚监测系统设计中的技术矛盾,设计方案达到了预期的目标,解决了因优化温室大棚监测系统而导致的高成本、系统复杂以及维修困难等问题,为后续相关系统的优化设计提供了参考依据。
