一种基于前视声呐的养殖网箱内鱼群数量评估方法
2023-08-22崔智强祝捍皓宋伟华马志凯
崔智强,祝捍皓,宋伟华,马志凯
(1 浙江海洋大学船舶与海运学院,浙江 舟山 316022; 2 海卓科(浙江自贸区)科技有限公司,浙江 舟山 316020;3 浙江海洋大学海洋科学与技术学院,浙江 舟山 316022;4 浙江海洋大学国家海洋设施养殖工程技术研究中心,浙江 舟山 316022;5 浙江海洋大学水产学院,浙江 舟山 316022)
中国海洋渔业在经历了长期的“掠夺式”捕捞生产后,海洋的天然渔业资源正在趋于衰竭。为缓解海洋鱼类产业“无渔可捕”的困境,中国渔业发展的重心逐渐向海水养殖转移。近海网箱养殖、围栏养殖等养殖模式作为海洋水产可持续发展的一个高新产业模式正在全国范围内迅速推广,并已形成规模化的养殖模式与产业。但现有各类海水养殖模式多属于粗放型养殖,在过程中未能对养殖区内鱼类的数量、状态等信息进行科学、有效的监测与评估,导致当下国内海水鱼类养殖产业始终未能形成生态化、高质化、科学化的管理与生产方式,大大影响了海洋鱼类养殖产业的发展[1-3]。因此,如何精准评估出网箱养殖内鱼类的数量、分布特征等信息便是目前网箱养殖产业亟待解决的问题。
现已有学者在研究中曾提出,在对网箱等养殖设施进行信息监测时,其首要监测目标是对设施内养殖海洋鱼类的容量与产出的评估,而核心是对设施内鱼群数量信息的准确获取[4-5]。随着声呐技术的发展,近年来利用水声仪器在海洋资源评估、调查中已经取得了一定的成效[6-10]。Zhang等[11]采用走航的方式,利用双频识别声呐开展了对水库鱼类总量以及密度估算,并分析了其研究区域内鱼类的平面空间分布特征;Jing等[12]、Shen等[13]利用DIDSON成像声呐所采集的声学图像,获得了比一般回波探测声呐更高的探测精度,实现了对水下鱼类目标的识别和自动计数[12-13]。上述研究表明,利用资源船携带声呐设备进行渔业资源评估具有更快速高效、灵活便捷的优势。但由于现有海洋渔业资源调查方法多是依靠调查船进行走航作业,无法用于小面积养殖设施内的鱼群调查。其次,船体走航所产生噪音对鱼群会产生驱散作用,对所测结果的影响不容忽视,所以如何利用声呐技术更高精度地获取鱼群数量信息仍需展开进一步研究。
现有文献均表明使用前视声呐进行水下目标进行探测、评估已成为一种新型研究方向。其大多是采用数字图像处理技术对目标进行处理,在此基础上衍生出检测、识别等研究[14],并且在实际中已经取得了一定的成效,理论上可以用来进行网箱内鱼群数量估计,但相关研究成果还未见报道。
针对上述研究现状,提出了一种基于前视声呐的养殖网箱内鱼群数量统计方法,并在舟山市东极镇青浜岛近岸大黄鱼养殖网箱内进行了测量验证。
1 理论与方法
1.1 前视声呐工作原理
前视声呐工作时通过向前方以水平开角α、垂直开角β发射声波信号,接收波束照射区内目标物的回波信号进行成像。声呐所发出探测波束被水平分割成若干垂直开角为β的扇形波束,每个波束按图1所示照射目标,形成一组距离、强度信息,所有波束的回波强度信息按位置关系排列构成声呐图像[15-16]。回波信号的强度大小反映了不同目标物的声学反射特性,所产生的时延则可以确定目标物相对于声呐位置的实际距离[17],通过对声散射信号图像的信息提取即可获得各类水下目标的参数,例如鱼群密度、大小和方位等。
图1a为垂直视角上声呐工作示意图,垂直视场角为β;图1b为声呐所采集到的一帧原始图像,xoy坐标系为声呐水平视场坐标,则扇形(图1c)则为坐标变换后图像,空包部分则由插值进行填充;像素点P(x,y)转换为以声呐所在位置为中心的扇形区域中的像素点P′(x′,y′),依据直角坐标与极坐标之间的关系,转化公式如式(1)所示:
(1)
φ=∠B′O′O+x×Δφ
(2)
式中:P(x,y) 为声呐采样区域,即原始声呐图像大小,r为图1c中O′P′的长度,r=L×y/n,L表示声呐所设置的探测距离,φ表示对应的极角。
本研究采用Gemini 1200 ik多波束前视图像声呐作为水下鱼群散射声图采集设备,设备参数如表1所示。
1.2 鱼群标定
本研究以舟山大黄鱼养殖网箱为主要应用场景。考虑到实际探测中,同一目标在声呐的不同方位,其在声呐图像中的特征及尺寸均会发生变化。为有效区分大黄鱼在水下的目标特征[18],借助在消声水池内对大黄鱼试验样本进行的声学标定的方法来确定其在声呐图像上的特征值:二值化阈值以及目标大小,以便于对其进行提取、统计。标定场景如图2a所示,标定大黄鱼样本为大黄鱼养殖网箱内实际采样鱼体,图2b为声呐位于水下0.6 m处探测样本大黄鱼所形成的声学图像。

图2 样本大黄鱼声学标定

(3)
(4)
(5)
ω0+ω1=1
(6)
(7)
(8)
采用遍历的方法使得类间方差g接近最大的阈值T,即为所求阈值T=0.331。考虑到适用场景主要为围网、围栏养殖,鱼类在鱼苗期统一下放,其区域内的鱼类大小个体差异不大,可将养殖区域内鱼体近似视为同一大小,因此试验中采用当季大黄鱼作为样本,体长约为20 cm。试验中考虑到鱼类聚集对目标提取的影响,分别对不同数量下的鱼体声学图像进行提取,如图3所示,并给出提取结果的周长及面积(以一个像素点为单位),依据不同距离与不同数量在消声水池试验结果如表2所示,对应目标提取结果如图4所示。
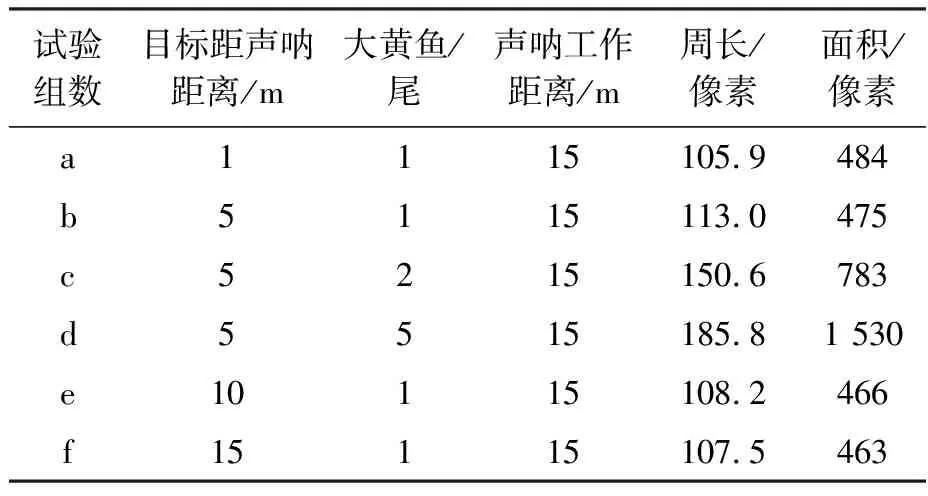
表2 声学标定结果

图3 不同数量下的试验样品
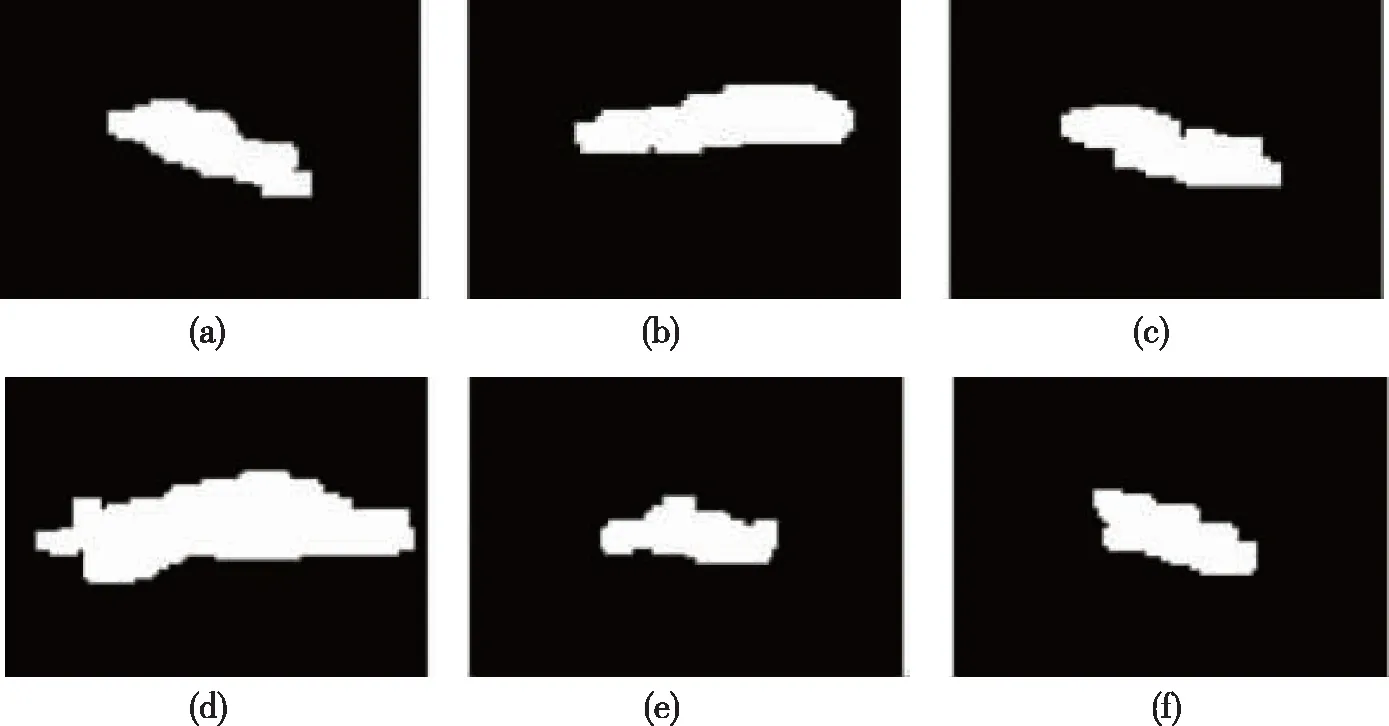
图4 声学标定图像数据提取结果
图4为对应试验组数的声学标定提取结果图,结合表2的数据中b、c、d组对比可知,在与声呐距离一致时,大黄鱼数量愈多,声呐图像所提取的亮点大小愈大,并且当鱼群并非大部分重叠时,与单条鱼的声学图像面积有叠加的关系;a、e、f对比可知,大黄鱼样本与声呐距离变化,鱼类声呐图像周长虽然有变化,但变化幅度太小,难以分辨,所以将图像面积作为提取大黄鱼目标的依据。由于消声水池大小限制,并且当样本过度集中在一起时,无法准确区别样本个数,但可通过单条样本的图像面积进行估算;通过多次试验后,最终取定单条鱼的声学图像阈值均值δ=463个像素点,并以此为依据,参考上述试验结果作为提取目标、划分鱼类的标准,对实测数据进行鱼群计数。
1.3 基于前视声呐的网箱内鱼群数量评估方法
在完成目标检测网箱中养殖鱼类声学标定的基础上,设计基于前视声呐的养殖网箱内鱼群数量评估方法。设计声呐工作示意图如图5所示。
设计将声呐安装至可旋转云台上,由无人船携带云台至网箱中心,通过定时旋转云台达到对网箱区域的全覆盖扫测。
其中,以无人船为原点建立xyz空间坐标系,θ表示声呐照射方向在xoy平面上的投影与x轴夹角,φ表示声呐照射方向与z轴夹角,水下目标物位置则表示为f(x,y,z),将鱼群标定结果作为目标提取的条件,利用图像处理的手段实现对养殖网箱钟的鱼群数量进行统计。由于网箱空间有限,虽然船只无法进入,但是水域体积一定,为了统计整个网箱内的鱼群数量,采用声呐在中心位置处通过水平以及垂直角度的旋转,实现对网箱的整体扫测。
声呐垂直开角β=20°,水平角度α=120°,云台先固定水平方向,垂直旋转Δβ=20°记录一次时间数据,每次停留Δt=10 s,直至垂直海底后调回水平;后水平旋转Δα=120°,重复操作直至探测范围完全覆盖网箱区域,记为i=1次测量。数据以8帧/s记录,每次记录约80 s。
以大黄鱼声学图像阈值δ提取每幅声呐图像中的大黄鱼数量,并记Δβ所测鱼群平均数量Nj为此段鱼群数量。采用逐段累加的方式确定整个网箱中的大黄鱼数量Ni,最终得到整个网箱内的大黄鱼数量N,如式(9)所示。
(9)
式中:I为试验次数,J=3×(π/Δβ-1),其水箱内的大黄鱼密度ρ=N/V,V是整个网箱区域水下体积。
根据坐标转换后的声呐图像亮点位置坐标以及声呐探测角度,可以得到每个鱼类目标的空间位置坐标。其空间位置坐标f(x,y,z)转换关系如式(10)所示,结合水深、统计目标数可以获得鱼群在网箱中随深度以及水平面上的分布密度,可得出大黄鱼在网箱中的分布规律,以有效指导大黄鱼网箱渔业养殖。
(10)
2 试验与分析
2.1 试验概况
为获取实测数据对数量评估方法进行验证,团队于浙江省舟山市青浜岛近海大黄鱼养殖基地网箱中进行方法检验,试验点位置与网箱照片如图6所示。试验时将声呐安置于云台之上,本次试验网箱为直径15 m、深8 m的圆柱形网箱,声呐置于水下0.6 m处,探测方向可通过云台无线控制。配置方式如图7所示。

图6 浙江省舟山市青浜岛大黄鱼养殖基地图
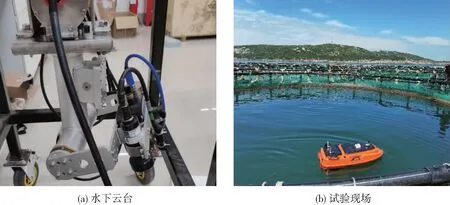
图7 声学探测现场
2.2 试验数据预处理
考虑实测海洋环境下,受水中各类环境噪声及非目标物散射影响,前视声呐测量得到的声呐图像往往存在较多噪声干扰。这些干扰将对后续开展基于前视声呐的网箱内鱼群数量评估方法应用带来影响。因此在方法实际使用中,需先对前视声呐实测图像进行预处理,以实现所研究鱼群评估方法的有效应用。
网箱中实测声呐图像与经预处理后的声呐图像对比情况如图8给出。
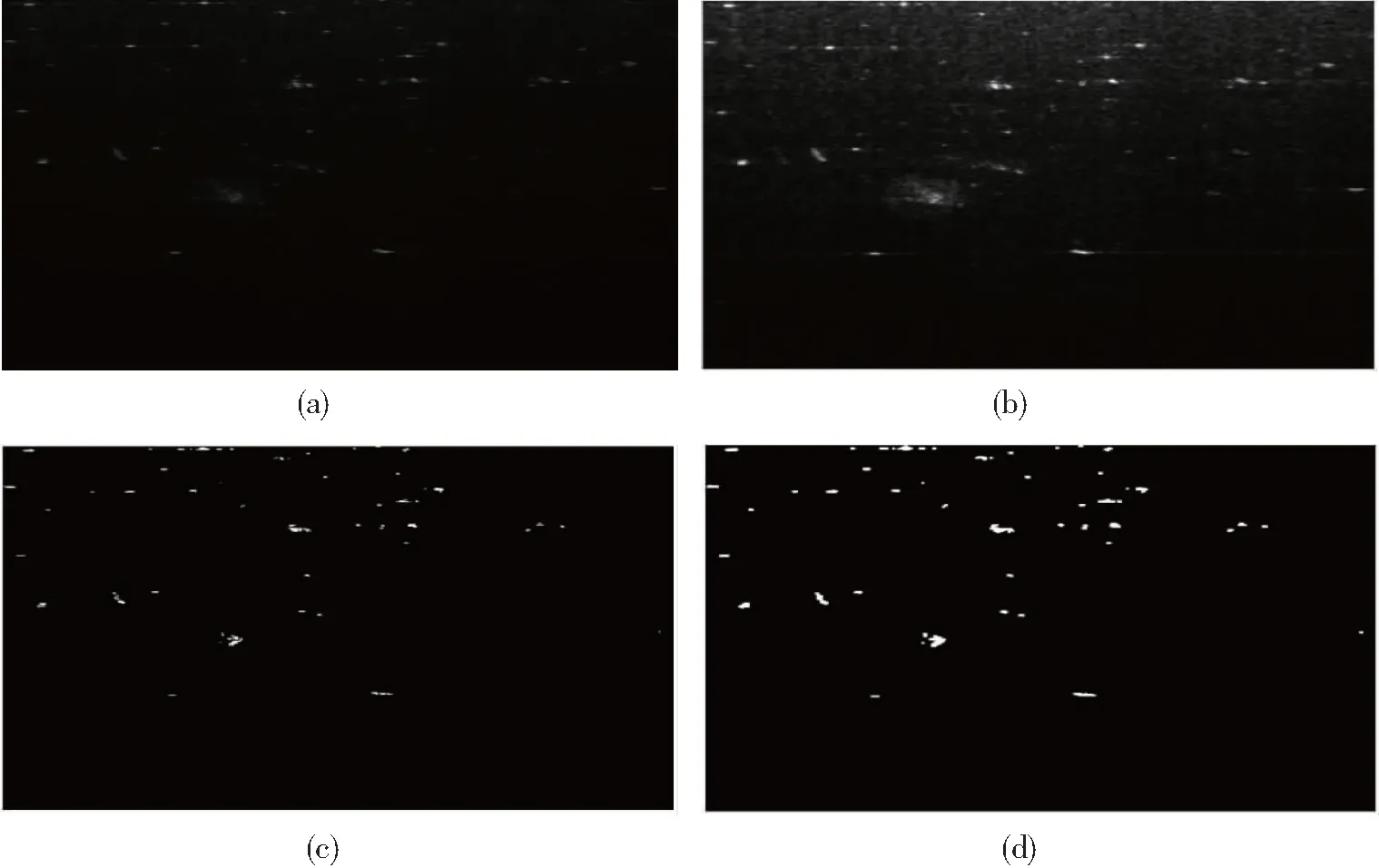
图8 实测声呐图与预处理后声呐图对比
在预处理中,首先通过分段线性拉伸算法提高原始声呐图(图8a)中的信噪比,突出突显图像细节[19];其次通过中值滤波对拉伸后的声呐图像进行去噪处理得到图8b,后采用Gaussian-Laplace滤波器对图像处理,消除离散点噪声[20-24],再由二值化处理将目标与背景分开(图8c)。在实际结果处理时,在确定阈值二值化处理后发现会存在小面积斑点,初步确认情况可能为经过边缘提取后的同一目标存在边缘断裂的情况,为了防止不连续的边缘被误检测为两个目标,消除此类斑点噪声的影响,以水池试验中的声学标定结果为基准,通过形态学中膨胀处理的方法将图像中断裂的小型亮点消除,计算公式如式(11)所示,处理结果如图8d所示。
P′(x,y)=P′(x-1,y)=P′(x+1,y)=P′(x,y-1)P′(x,y+1)=1, ifP(x,y)=1
(11)
式中:P′(x,y)代表图像内坐标位于(x,y)的灰度值。
图像拉伸虽然提高了目标物与背景的对比度,但同时也将噪声灰度值进行了变换[25-26]。中值滤波对所处理声呐图像有着较好的去噪效果,如图8b所示,针对此类声呐图像,中值滤波后的图像噪声明显降低,能相对减少后续处理中噪声所带来的误差。图8c中的每个目标更加饱满,有利于最后的目标提取、分割计数。
2.3 网箱内鱼群数量评估
在利用前视声呐数据对养殖网箱内鱼群数量进行评估时,在对实测声呐图像进行预处理后,依靠消声水池实测标定结果利用公式(9)进行目标数量评估。最终以图9扇形区域展示计算结果(以单帧图像为例)。
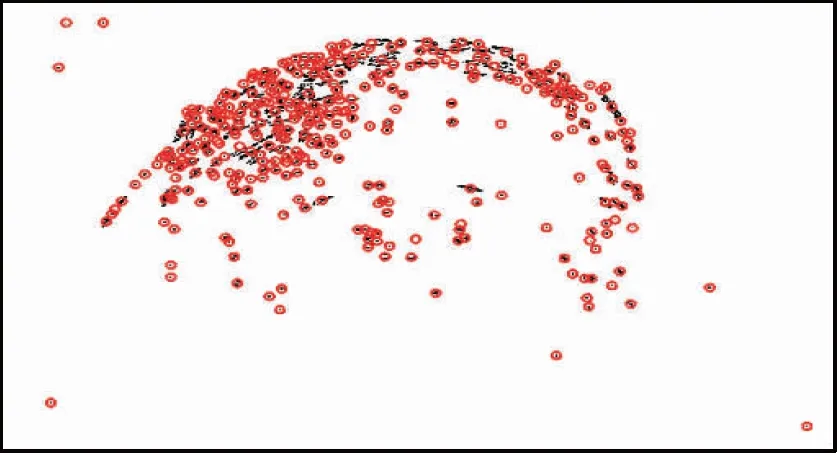
图9 实测数据处理结果
根据试验目标统计结果,以云台携带前视声呐旋转360°完整一次网箱内扫描为一次有效数据。取5次有效数据的平均值,共同统计得出鱼类目标共约7 907条。所以探测区域可近似看作直径15 m,高为8 m的圆柱体,可得探测区内鱼类目标的平均密度约为5.59尾/m3。
为了验证统计结果,通过在网箱中采用标记重捕的方法进行统计,表3为人工重捕计数结果与声呐图像计数结果对比,图像计数结果相对于人工计数结果误差均在10%以下,并且均值计算后的相对误差仅为2.45%,因此可以验证本方法对于网箱内大黄鱼数量有着较好的评估效果。
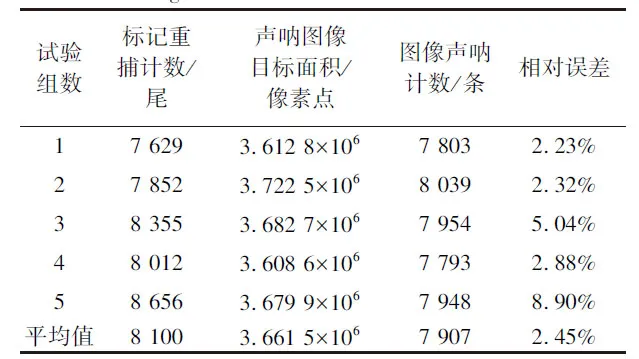
表3 标记重捕与图像计数结果对比
2.4 网箱中大黄鱼空间特征分析
以网箱区域为研究重点,由于鱼群多呈聚集姿态,并且网箱空间有限,试验时鱼群水平分布变化小。取5次试验数据为例进行空间特征分析,监测时间以及监测海域流速如表4所示,对5次试验结果取均值后,给出网箱中大黄鱼的水平空间分布情况如图10所示,其中彩色圆点表征此位置鱼群总数量,颜色由深蓝过渡到明黄色表示与鱼群数量,即由少至多。
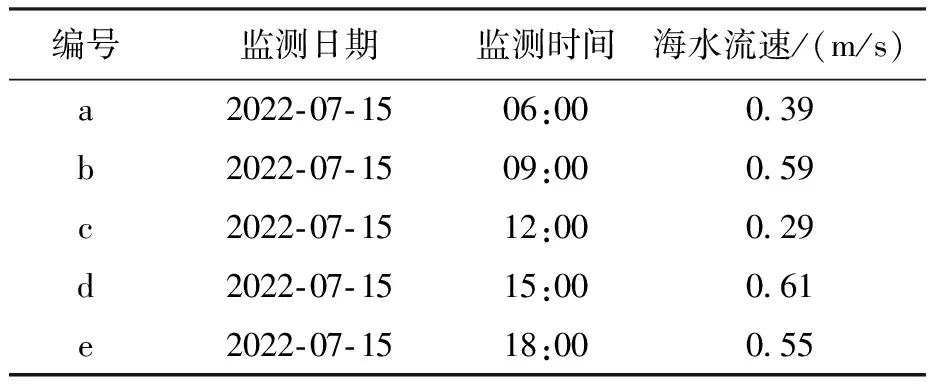
表4 试验时间以及海水流速表
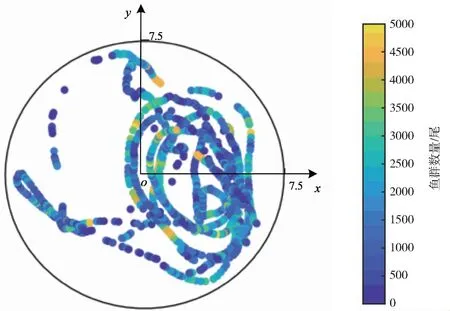
图10 鱼群水平分布特征
在实际探测时,声呐虽相对稳定在围网中心,但声呐转动速度相比于鱼群游动速度较慢,因此会出现将同一目标进行重复标记的情况。但在直径为15 m尺度的网箱内,从整体上看,图11能够体现鱼群的水平分布特征。可以看到水平方向上,网箱中间鱼群分布所占水平空间区域较少,多呈聚集群体,鱼群大都分布在网箱东南角区域,所测单个探测点鱼群数量最多可至3 500尾[27-28]。
在计算鱼群垂直分布时,给出五个时间段内不同水层下的鱼群数量进行统计。其中,xoz为以无人船为原点的平面坐标系,结果表明,鱼群在各个时间段内均主要集中分布在4~7 m附近水层,主要分布在养殖网箱中的中下层水域。
结合文献[29-32]中对养殖网箱中鱼群分布特性的分析,其分布特征存在的主要原因有如下两点:(1)人工养殖网箱中,通常习惯在贴近网箱边缘投饲,长时间投饲使得大黄鱼产生一定的驯化效果,从而聚集在靠近网箱边缘区域;(2)大黄鱼垂直分布最主要的影响因素为水温以及溶氧含量,水温垂直分布以及水域溶氧分布将影响大黄鱼的垂直分布特性,众多文献表明,大黄鱼主要活动在水下4~10 m区域,且主要集中于水深5~6 m位置处,网箱深8 m,所以大黄鱼在网箱中的垂直分布呈现处在4~7 m处聚集,两者分布情况大致相符。人工养殖时投饲区域位于网箱东南角,与其水平空间分布特性结果相符合。
青浜岛大黄鱼养殖网箱中大黄鱼主要分布在水深4~7 m处,即养殖区域的中下层,且大多聚集在围网边缘,从声学角度上分析是由于大黄鱼对声音较为敏感,且偏向于流速较大的水域,所以垂直主要分布于中下层区域,而由于网箱养殖中人工投喂饵料基本位于网箱边缘,所以黄鱼基本也聚集在此处。同时,这也符合养殖大黄鱼的主要分布特性,为科学指导后续养殖提供了可靠依据。本研究利用图像声呐对大型深远海养殖网箱进行了大黄鱼的初步数量估计,但鱼群数量估计的误差来源是多方面的,既存在不同大黄鱼姿态对声学图像的影响,也有水下环境复杂所带来的干扰,但相较于传统渔业资源评估的采样捕捞等方式,通过声呐图像采集的水下声学图像进行网箱渔业资源分析的方式为现代渔业评估提供了新的思路。
3 结论
本研究主要通过对图像声呐所获取的大黄鱼声学图像进行研究分析,以消声水池中大黄鱼的声学标定结果为基础,结合图像处理的手段,对探测区域的大黄鱼数量进行了统计分析,完成了整个养殖网箱的鱼群数量估计以及空间分布特征分析,主要结论如下:
(1)本研究尝试基于大黄鱼声学标定数据下的目标提取算法,在有先验标定数据的情况下,能够有效地对噪声进行滤除,该算法具有计算方便、快捷,并且易于实现的特点。
(2)得益于网箱内为封闭区域的优势,本研究方法能够与网箱内鱼群的估计结果进行人工对比,在极大提升统计效率的基础上,图像计数结果相对于人工技术结果误差均在10%以下,并且均值计算后的相对误差仅为2.45%,初步证明了此类方法的实用性。
(3)从网箱养殖大黄鱼的空间分布特征可以看出,人工饲养对其分布特征的影响十分明显,根据此分布特征可以科学指导渔民投饲及捕捞等作业。针对鱼群数量统计及分布特征分析的难点,图像声呐能在一定程度上辅助进行渔业评估。
