点线融合的机场跑道地基沉降全寿命监测与预估方法
2023-08-21卢海
1 引言
地基是机场道面结构的重要支撑平台,在原地表状况、地基填方高度、施工水平和水文地质条件等的综合影响下,地基会产生工后差异沉降。 这种差异沉降将降低地基对道面结构的承载能力,导致局部应力、应变的增大,引发跑道断板、接缝损坏、错台等病害,缩短跑道使用寿命并严重威胁飞机滑跑安全[1]。因此,准确监测地基沉降,合理预测其发展趋势并进行科学评估十分必要。
传统的地基沉降监测主要采用水准仪、 全站仪等设备进行人工点式操作,自动化水平低、费时费力,对机场施工干扰较大[2]。 通过分层沉降仪、磁环沉降仪等可实时获取地基内部各层的沉降,但传感器埋设过程复杂,施工难度和成本高,适用于少数代表性点位的沉降监测[3-4]。 新兴的合成孔径雷达干涉测量技术(InSAR)可无干扰地获取飞行区全域的沉降信息,但其主要进行地表测量, 难以得到道面结构以下的地基沉降数据[5]。因此,本文综合采用单点沉降计和智能沉降仪,通过点线融合的方式, 实现沿跑道纵向或横向地基沉降的全寿命监测,在此基础上进行地基沉降的计算和预估。
2 地基沉降监测
2.1 传感器选型
2.1.1 单点沉降计
采用单点沉降计感知单个监测点位的绝对沉降量。 单点沉降计基于光纤光栅技术感知外界环境变化, 可通过光信号(波长)实现解调和传输。 通过钻孔埋设,将传感器的锚固端固定在稳定土层中,而活动端固定在土体表面。 当土体发生沉降时,传感器的活动端跟随移动,导致光的波长发生改变,通过获取变化的波长数据即可换算出土体绝对沉降。
2.1.2 智能沉降仪
采用智能沉降仪感知多个监测点位之间的相对沉降量。智能沉降仪基于光纤光栅技术或振弦技术感知外界压力变化,通过光信号(波长)或者电信号(电压)实现解调和传输。 传感器置于充满液体的装置中,土体发生沉降时,沉降仪同步移动而产生液压差, 从而引起传感器的光信号或者电信号发生改变, 通过获取变化的信号数据即可换算各个点位之间的相对沉降。
2.1.3 传感器技术要求
地基沉降监测面向跑道建设和运维的全寿命周期, 传感器埋设后难以更换,因此,单点沉降计和智能沉降仪的寿命至少应与跑道设计寿命一致,对于沥青跑道不小于20 年,水泥跑道不小于30 年。 综合考虑地基沉降量的监测范围和精度要求,上述两个传感器的量程应不小于1 000 mm,精度应不大于1.0‰FS。
2.2 传感器点线融合布设
在各个监测断面的地基填筑体顶面布设传感器, 主要获取地基全局差异沉降状况, 为分析道面结构安全评估提供依据。 其中,布设一个单点沉降计和若干个智能沉降仪,单点沉降计与其中一个智能沉降仪布设在同一点位,如图1 所示。 智能沉降仪获取的各点位之间的相对沉降量与单点沉降计获取的其中一个点位的绝对沉降量叠加即可得到各点位的绝对沉降。 通过两类传感器的互相配合,实现地基沉降监测的点线融合布设,以获取地基沿跑道纵向或横向的沉降情况。
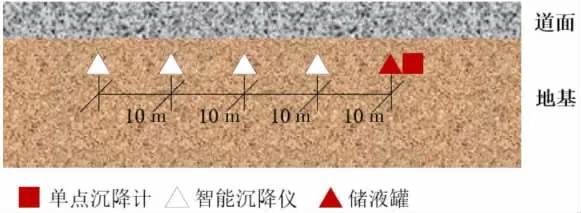
图1 单点沉降计和智能沉降仪的点线融合布设方案图
2.3 传感器协同施工
采用施工同步技术埋设单点沉降计和智能沉降仪。 各个监测断面施工时, 均采用沟槽开挖—单点沉降计安装—智能沉降仪安装—沟槽回填的方式,同时布设上述两类传感器,以增大传感器的存活率和互相的关联性,并加快施工速度。
3 地基沉降计算
3.1 绝对沉降
绝对沉降,即地基自开始施工至某一时刻产生的沉降,可采用上文的单点沉降计获取监测断面沿纵向或横向的绝对沉降量。
3.2 工后沉降
工后沉降,即地基自竣工至当前时刻产生的沉降,计算公式如下:
式中,ΔSi为工后沉降,i 为0、1、2、3;Si,2为监测点当前时刻绝对沉降,i 为0、1、2、3;Si,1为监测点竣工时刻绝对沉降,i 为0、1、2、3。
3.3 工后差异沉降
地基相邻监测点工后沉降的差值与其水平距离之比即为工后差异沉降。 工后差异沉降是对跑道地基沉降变形性能的描述,表征地基不均匀沉降状况。 本方法采用智能沉降仪计算监测工后差异沉降,差异沉降的计算方法如式(2)所示:
式中,Di为工后差异沉降,i 为0、1、2、3;Li为相邻监测点水平距离,i 为0、1、2、3。
相邻智能沉降仪数据的差值除以其水平间距得差异沉降Ci:
式中,Hi为智能沉降仪基于储液罐的沉降。
由式(3)可以求得,竣工时刻差异沉降Ci,1,当前时刻差异沉降Ci,2。 那么工后差异沉降计算如式(4)所示:
4 沉降预估
4.1 沉降预估方法
本文采用双曲线模型预估跑道地基全寿命周期内的绝对沉降量, 相较于常用的对数模型计算结果不依赖于参考计算点位选取,避免了点位选取的随机性所带来计算偏差。
假定地基沉降变形与时间近似为双曲线函数关系如式(5)所示:
将待定参数s∞和α 提取到等式右边可将式(5)写成:
4.2 沉降控制标准
根据场道地基的变形特点及要求,确定地基沉降控制标准:
1)MH/T 5027—2013《民用机场岩土工程设计规范》规定跑道地基工后沉降应控制在0.2~0.3 m,如表1 所示。

表1 工后沉降和工后差异沉降规范要求
2)最大残余变形形成后,道面区标高不低于土面区标高,且两者未形成明显高差,以保证飞行安全。
3)地基不协调变形所引起的道面板倾斜不致造成道面接缝的破损。
4)所形成的沉降控制标准可通过对设计过程、施工过程等的控制予以实现,即所提出的控制标准必须具备“可实现性”。
5)为实现地基沉降控制标准,所采取的措施与当前的经济水平相适应,即具有经济合理性。
5 计算案例
在北方某机场实际监测了地基沉降情况, 图2 为单点沉降计的沉降时域曲线。 2017 年9 月至2018 年7 月,地基沉降量大、沉降速度快,绝对沉降约28 cm;2018 年7 月至2020 年3 月,沉降增长缓慢,绝对沉降量2 cm;2020 年3 月至2022年,地基沉降趋于稳定,保持在29 cm 左右。
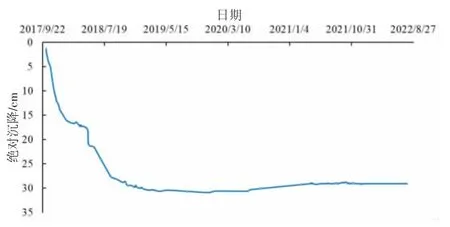
图2 单点沉降时域曲线
基于上述方法对机场的实际工后沉降情况进行计算分析,各点的工后沉降与差异沉降分布如图3 所示,可得工后沉降最大值为3.6 cm,最小值为0.3 cm,中位数为1.1 cm,工后差异沉降最大值为0.4‰,最小值为0.1‰,中位数为0.25‰,工后沉降显著小于规范要求80 cm,工后差异沉降显著小于规范要求的1.5‰。 计算结果证明,传感器埋设成功且运行状态良好,同时地基工后差异沉降得到有效控制,不均匀沉降处治效果达到预期。
6 结论

