基于数字IMU的术后健康追踪器设计
2023-08-21盛子恒李跃忠
盛子恒 李跃忠

摘 要:术后创伤监护是为了防止术后二次创伤的必要措施。在现代社会生活下,这为监护人带来了时间及身体上的压力。而传统的方案具有适应性差、可靠性低、舒适感低等特点,这对监护人的帮助极为有限,也可能造成术后二次创伤。文章设计了一款基于IMU及AVR微处理器的主要由受压检测模块、电源监测模块组成的防压耳报警器。受压检测模块主要通过IMU识别头部姿态进而检测患耳是否受压。电源监测模块主要负责管理锂电池以及各种执行器的供电。此系统实现了包括提前受压检测,受压检测等功能,充分解决了看护痛点。
关键词:微控制器;可穿戴设备;健康追踪器;术后护理;AVR
中图分类号:TP212.9 文献标识码:A 文章编号:2096-4706(2023)12-0058-04
Design of Postoperative Health Tracker Based on Digital IMU
SHENG Ziheng1, LI Yuezhong2
(1.No.3 Middle School of Nanchang, Nanchang 330029, China; 2.East China University of Technology, Nanchang 330032, China)
Abstract: Postoperative trauma monitoring is a necessary measure to prevent secondary trauma after operation. In modern social life, this brings time and physical pressure to the guardian. However, the traditional scheme has the characteristics of poor adaptability, low reliability and low comfort, which is extremely limited to help the guardian and may cause secondary trauma after operation. This paper designs an anti-pressure ear alarm based on IMU and AVR microprocessor, which is mainly composed of pressure detection module and power monitoring module. The pressure detection module is mainly used to identify the head posture through IMU to detect whether the affected ear is under pressure. The power monitoring module is mainly responsible for managing the power supply of lithium batteries and various actuators. This system realizes the functions including early pressure detection, pressure detection, and fully solves the nursing pain points.
Keywords: microcontroller; wearable equipment; health tracker; postoperative care; AVR
0 引 言
康复器械产品涉及生物、医学、机械、电子、计算机、新材料等技术领域,是典型的技术交叉型特殊产品[1]。然而防止伤口因受压而造成伤害是一个耗费时间精力的过程,容易因为监护人员一时疏忽而对病人造成伤害。随着城市化的推进以及工作节奏的加快,彻夜看护患者对家属造成的影响是不可估量的,因此带有受压检测功能的术后健康追踪器被人们迫切需要。郎建志[2]等人设计了一款基于PLC控制的智能康复床,可以通过触摸屏来控制,具有基本的术后护理功能,但是不能进行耳压检测。许建国[3]等人利用ZigBee物联网技术,实现了医护人员可以实时观察病房内的环境信息,以及病患诊疗信息的功能,但是并没有解决防止术后二次创伤的难题。本文利用IMU传感器读取头部位置,角速度等信息,并且使用AVR处理器进行受压检测算法处理,实现了受压检测功能[4,5]。
1 系统总体设计
健康追踪器,以下简称“报警器”,主要由AVR微处理
器、扬声器、线性振动电机驱动模块、数字IMU(惯性测量单
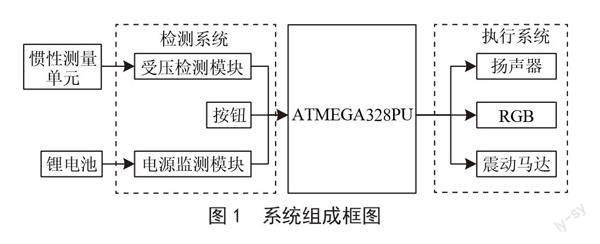
元)、电源管理系统、RGB以及按钮构成。ATMEGA328PU为该设计的控制芯片,该芯片库函数较多,方便用于开发。AVR微处理器采集IMU收集的角速度,加速度等信息,并且对其进行分析和处理,以此检测患者患耳受压情况。通过RGB、扬声器、线性震动电机驱动模块将报警信息传递给患者,完成不同等级、不同类别的受压报警,以此来减少过长时间的患耳受压所造成的二次术后伤害。程序与硬件各自预留了系统参数接口以及一个UART接口,使得后续开发更为方便。防压耳报警器的系统框架如图1所示。
2 检测系统的硬件设计
2.1 受压检测模块
受压检测模块由ICM20608芯片构成,ICM20608 是 InvenSense 出品的一款6轴MEMS传感器,工作电压为3.3 V,包括3轴加速度和3轴陀螺仪。ICM20608使用iic协议与AVR处理器进行通信,传递人体的角速度与加速度数据给控制中心,再利用运动检测算法进行数据处理。图2为受压检测模块的电路原理图,R3和R4为上拉电阻,防止工作频率过高导致通信失败,C8和C7为滤波电容,分别过滤高频杂波和低频杂波。AD0为芯片的地址接口,通過改变此引脚的高低电平来改变传感器的通信地址,方便单片机控制多个ICM20608。
2.2 电源监测模块
报警器的应用场景对电池续航要求高。每次使用前用户需较准确地了解电池此时的最大使用时间。此装置采用MAX17048电池检测芯片,其特点如下:负载变化补偿、电池容量实时下降率监测、初始容量估计、剩余容量精确监测、支持I2C通信。这在满足系统要求的同时缩小了电路板面积,保证了系统安全。电源监测芯片需要3.3 V电压供电,芯片通过CELL引脚与锂电池相连接,然后处理剩余电量容量数据,然后再通过I2C通信方式将电量信息传递给控制芯片。图3为电源模块原理图。
主板核心供电电压为3.3 V,此电压介于锂电池的满电电压与截止电压之间。因此,报警器采用TPS63802升降压转换器:最大输出电流2 A,具有小体积,转换效率高等特点。
电源部分采用了基于MAX16054芯片的冷启动方案,此去抖动芯片内置双稳态电路,芯片的输出引脚连接到了TPS63802的使能引脚。稳压芯片使用R10与R11进行分压压,VFB的基准电压为0.5 V。
通过公式可知,R11和R10的值分别定为511 kΩ和91 kΩ,通过R11和R10分压输出3.3 V。C11为芯片的滤波电容,过滤低频干扰。芯片的输入连接到了按钮。EN为芯片的使能引脚,通过控制器的GPIO引脚来控制。MODE引脚则是由控制芯片通过控制GPIO的高低电平来选择模式,低电平为稳压输出模式,高电平则为PWM控制模式。而关机功能是通过拉低芯片复位引脚电平完成双稳态电路复位,进而拉低输出引脚电平来关闭TPS63802电路的工作状态。
2.3 线性振动电机驱动模块(振动电机)
防压耳报警器集成了一块DRV2605L振动电机驱动芯片,该芯片工作电压为3.3 V,常用于触摸屏的触摸反馈,以及按键反馈。该芯片检测电机线圈的Back-EMF效应,通过过载电机驱动电压以及闭环控制实现了对振动电机的精确控制。与传统方案相比,内置振动模式库,具有体积小、精度高、振感强、方便用户开发等特点。使系统在规定范围内给用户带来了更舒适、自然的体验。DRV2605L振动电机驱动芯片通过I2C通信模块与主机进行通信。通过单片机传递的控制信号来控制振动大小以及频率。电机模块原理图如图4所示。
2.4 扬声器(无源蜂鸣器)
为减小系统所占体积,贴片无源蜂鸣器被集成在主板上,通过PWM控制发声。PWM一般指脉冲宽度调制,是一种根据相应载荷的变化来调制电源输出的模拟控制方式。实验中发现,熟睡中的患者对于报警周期为1 000 ms的PWM信号,高电平时叠加频率为800 Hz的声音信号感到最为舒适且敏感。
2.5 RGB
RGB指示灯采用AVR微处理器的DAC功能控制,此RGB具有体积小、低功耗、价格低廉等特点,基本满足设计要求。通过控制各个通道的电压进而控制RGB所发出的灯光的颜色,达到为用户指示系统状态的目的。
3 系统软件设计
3.1 IMU运动检测程序设计
检测系统通过I2C总线读取IMU输出的三轴加速度及角度数据,再将这些数据分别加入队列当中,通过滑动窗口法处理这些数据。位于队列最前面的数据将被提取出来作为设备是否在运动的检测数据。
由于IMU始终在z轴上受到一个竖直向下的重力1 g,当变速运动时,a将不等于1。根据这个原理,只要判断a的取值就能判别设备在一段时间内是否运动。对设备运动的判断将会作为是否激活电量指示功能的条件。
在术后健康追踪器的使用条件中,获取范围为[0°,360°]的IMU的角度是必要的。因为IMU输出的角度只能提供[0°,90°]或[-90°,0°]的输出,而得到[0°,360°]的输出必须通过判断IMU朝向(也就是,判断z轴加速度的极性)来判断得出。而z轴加速度的投影与IMU运动时对应的z轴加速度数值的变化都会影响角度的线性变换。尤其是,当加速度过大时,转换后的角度会在角度接近-90°或90°时产生毛刺。因此,为了减少毛刺,存储在队列中线性变换后的角度值将被计算其标准差,如果标准差大于常数C,那么可以认为数据在这个时刻产生了毛刺,此时程序会从总线中重新读取10个数据并加入队列,并去掉异常值后求平均值再重新进行线性变换。
最终,对于计算IMU在头部的相对位置,介于患者在佩戴报警器时报警器不可能完全处于头部的对称轴上。因此建立一个相对极坐标系,用于判断术后健康追踪器对应双耳相对位置是必要的。线性变换后的角度数据的范围为[0°, 360°],并存储在数组变量θraw中。
3.2 主控制程序设计
所有的IMU触发事件基于调用一个返回值為枚举类型的回调函数实现的。根据返回值的不同触发不同事件。主要触发事件如图5所示。
通过检测标识位以及按键所触发的外部中断实现参数配置:配置的参数包括原点、左侧点和右侧点。当配置按键被短按一次时(按键按下时间为400~1 500 ms),变量counter将从0开始自加,将counter的值为3时,counter清零,因此范围为[0,2]。
当counter为0并且按键被长按一次(按键按下时间大于1 500 ms)时,振动电机短振3次,同时RGB蓝光闪烁3次,且变量,由此配置原点,并且执行:
? = θraw
θy = θraw - ?{?<θraw≤360}
θy = 360 - ? - + θraw{0<θraw≤?}
其中,?为按键被长按θraw时的值。
当counter为1并且按键被长按一次时,振动电机振动3次,同时RGB黄光闪烁3次,由此配置左侧点,并且执行:
θ = θy,a = 0{0<θ≤180}
θ = 360 - θy,a = 1{180<θ≤360}
θleft = θposleft = θ
θpreleft = θposleft - 0.25×θposleft
θposleft = θposleft + 0.55×θposleft
其中,θposleft为按键被长按时θ的值。
当counter为2并且按键被长按一次时,振动电机长振3次,同时RGB青光闪烁3次,由此配置右侧点,并且执行:
θ = θy,a = 0{0<θ≤180}
θ = 360 - θy,a = 1{180<θ≤360}
θright = θright = θ
θpreright = θposright - 0.25×θposright
其中,θposright为按键被长按时θ的值。
压耳报警的实现基于检测报警事件函数返回的值实现的。通过条件判断语句综合判断变量a,θ,θpreright,θright,θposright,θpreleft,θleft,θposleft,σ从而实现压耳检测。
电量检测是基于I2C SOC下降率1%警报中断以及轮讯实现的。轮询负责检测报警器的充电状态,而I2C警报中断则是负责检测电池当前电量从而通过RGB实现电量指示功能。
4 测试结果
经过六次测试,患者在头部向右动作时报警器都提前报警,但是在向左侧运动和平躺状态时,受压检测有一次失败,准确率达到了88%。在后续研究中将继续通过增加传感器的滤波算法,以及增加多个传感器互相结合以此来进一步提高准确率。该设计基本实现了受压检测功能以及电源管理功能。这大大减少了病患在手术后的风险,给病人家属减少了生活负担。测试结果如表1所示。
5 结 论
本文提出了一种基于惯性测量单元(IMU)的防压耳报警器。该报警器通过ICM20608传感器接收人体头部运动时的加速度以及角速度信息,随后利用受压检测算法在MCU中进行数据处理,判断人体受压情况,最终通过震动,灯光和扬声器的方式来进行报警。该设计实现了人体受压检测的功能以及电源检测功能。在有效帮助监护人看护患者,极大缓解监护人压力的同时,保证了手术后患耳的安全,为患者家庭营造了一个更好的术后看护氛围。该设备已经通过小规模的市场验证,反馈良好,具有广阔的应用前景。
参考文献:
[1] 赵昌友.多功能康复床结构与控制系统设计 [J].南方农机,2020,51(21):104-106.
[2] 郎建志,董明涛,崔桐林.基于PLC的智能康复床控制系统设计 [J].机电信息,2019(21):130-131.
[3] 许建国,张佳,郭麥成.基于物联网的医院病房智能监护系统设计与实现 [J].现代电子技术,2018,41(8):83-86+91.
[4] 罗聪,李辉,彭旺,等.基于STM32的智能安全监护系统设计 [J].仪表技术,2022(5):18-20.
[5] 马启良.穿戴式老年人智能监护系统设计 [D].武汉:武汉纺织大学,2021.
作者简介:盛子恒(2006—),男,汉族,江西余干人,研究
方向:嵌入式系统;通讯作者:李跃忠(1969—),男,汉族,江西赣州人,教授,工学博士,研究方向:检测技术与自动化装置。
