控制ADJ开关电源模块输出模拟量信号的设计*
2023-08-18卢佳慧张宝珍
卢佳慧,张宝珍
(福建省机械科学研究院,福建 福州 350005)
直流电机控制器调整电机转速的控制信号是模拟量信号,电压值范围是0.8~3.6 V,其中0.8~1.0 V表示待机工作状态,1.0~3.6 V表示电机开始运转,电压越高,电机转速越快。常用输出模拟量信号的设计包括DA(Digital-to-Analog Converter)数字量转化成模拟量模块(以下简称“DA转化模块”)和ADJ开关电源模块。在新能源无人船的控制应用中,无人船动力电机运行时会出现瞬态大负荷冲击电流,这些冲击电流会耦合出强干扰信号,由于DA转化模块的驱动能力较小,抗干扰能力较弱,容易被干扰信号损坏;ADJ开关电源模块属于电源特性的模块,其输出驱动能力和抗冲击干扰的性能均较DA转化模块更强、更可靠。基于此,本文通过控制ADJ开关电源模块输出模拟量信号的设计提供新能源无人船所需模拟量信号。
1 设计原理框图
ADJ 开关电源模块的电气特性是输出可调,工作模式是通过改变反馈引脚的电阻阻值调节反馈电压,输出可调的模拟量信号。本文采用单片机的SPI总线发送命令操作数字电位器,数字电位器根据获得的命令输出对应的电阻阻值,提供给ADJ开关电源模块的反馈引脚,从而输出可调的模拟量信号。为了确定输出的模拟量信号值是否正确,单片机通过AD(Analog-to-Digital Converter)模拟量转化成数字量模块(以下简称“AD转化模块”)检测输出的模拟量电压值。功能原理图如图1所示。

图1 ADJ开关电源模块功能原理图
2 ADJ开关电源模块
常用的ADJ开关电源模块如LM2576-ADJ,工作原理图如图2。通过改变外部电阻R2的阻值得到不同的分压值,分压值输入到反馈引脚F,反馈引脚内是一个稳压基准比较器,稳压基准比较器将分压值和基准值根据比较器的差值输出不同的模拟量信号,实现输出可调的模拟量信号。U out是输出的模拟量信号,Uref是稳压基准比较器的基准电压,电压值是1.23 V,Uout和外部电阻R2的计算关系如式⑴所示。

图2 ADJ开关电源模块工作原理图
根据式⑴,无论电阻R2取任何阻值,模拟量信号Uout的电压值都无法低于1.23 V,因此,要满足直流电机控制器接收模拟量信号的电压范围0.8~3.6 V,需要对基准电压进行分析,选择小于0.8 V的基准电压。
3 基准电压原理
ADJ 开关电源模块内部需要一个已知而且与温度系数无关的准确电压作为参考电压,这样ADJ开关电源模块才能输出一个稳定的准确的电源电压值,如式⑴中的1.23 V这个值就是基准电压值。ADJ开关电源模块内部采用双极结点带隙基准工作模式作为基准电压,带隙基准是利用一个具有正温度系数的电压与具有负温度系数的电压之和,二者温度系数相互抵消,实现与温度无关的电压基准。双极结点的基极(b)和发射极(e)的特性,正向电流情况下电压值Vbe随温度升高而变小(Vbe为0.63V),另一个特性,反向电流情况下ΔVbe电压值随温度升高而变大(ΔVbe为0.60V),Vbe和ΔVbe温度变化系数一样,但是方向相反,正负相互抵消,消除了温度系数的影响,因此双极结点带隙基准的电压值为0.63 V+0.6 V=1.23 V。若在ADJ开关电源模块内部的双极结点带隙基准电路上加一个divider电路(除法电路),可获得更低的ADJ开关电源模块的基准电压值。MCP1726-ADJ开关电源模块的基准电压Uref是0.41 V,其模块内部就采用了除3的divider电路1.23 V÷3=0.41 V,得到0.41 V的基准电压。
根据式⑴,MCP1726-ADJ开关电源模块的R2阻值与输出Uout模拟量信号电压值的对应关系如表1所示,当R1取10 kΩ,R2的取值范围从9.6~79.6 kΩ,输出电源Uout电压值相应变化范围为0.8~3.6 V。

表1 R2阻值与输出Uout模拟量信号电压值的对应关系
4 数字电位器
4.1 工作原理
由表1可以看出R2电阻取值范围为9.6~78.96 kΩ,对应输出Uout模拟量信号范围为0.8~3.6 V,满足了直流电机控制器的控制信号要求。本文采用X9C104数字电位器(以下简称“数字电位器”)输出变化的电阻阻值,其工作原理图如图3所示,数字电位器有100阶档位,电阻阻值范围为0.04~100 kΩ,滑动增量为1.01 kΩ。X9C104内部有99个电阻单元的电阻阵列,每个电阻单元和两端点(RH、RL)都有被滑动单元(RW)访问的触头,阻值升降控制数据线(U/D)、递增控制数据线(INC)、芯片被选择控制数据线(CS)组成的数据总线接收单片机的命令,获得命令后通过译码器控制滑动单元访问对应的电阻单元,输出需要的电阻阻值。数字电位内部还有一个非易失性存储器,可以存储记忆控制的电阻数据,并且断电后不会丢失。

图3 数字电位器工作原理图
4.2 工作时序
数字电位器的工作时序如图4所示。CS引脚为高电平时,停止总线接收数据;为低电平时,U/D和INC引脚才能接收数据。U/D引脚为高电平时,计数器开始往99累加;为低电平时,往0递减。INC引脚由高电平变为低电平时,计数器根据U/D状态累加或递减一次。

图4 数字电位器工作时序图
4.3 控制软件流程
数字电位器的控制软件流程如图5所示,先判断是否有调整电阻值标志,需要调整电阻值时,判断是否增加或者减小电阻阻值。相应配置U/D引脚高电平或者低电平,置INC引脚高电平为改变RW滑动单元准备,延时1μs确定INC高电平有效,配置CS引脚低电平,延时2μs确定CS的低电平有效;数字电位器开始允许接收命令,置INC引脚为低电平,延时2μs确定INC由高电平变为低电平为有效操作,完成一次RW滑动单元累加或递减改变电阻阻值。之后重新配置CS引脚高电平,禁止数字电位器被干扰信号误操作,配置INC引脚为高电平,为下一次命令做准备,清除调整电阻值标志,完成调整电阻阻值软件操作。

图5 数字电位器的控制软件流程
4.4 硬件电路设计
数字电位器硬件控制电路设计如图6所示。图中U2器件是单片机PIC18F67J11,IC2器件是ADJ开关电源模块芯片MCP1726-ADJ,IC3器件是X9C104数字电位器芯片,ADJ开关电源模块的ADJ引脚外围电路由电阻R1、R3,数字电位器电阻阵列的2端RH、RL引脚,以及滑动单元RW引脚组成。X9C104芯片电阻阻值范围为0.04~100 kΩ,参考表1可以看出,X9C104自身的阻值范围就可以满足0.8~3.6 V的模拟量值。但是,实际操作中X9C104初始化时会出现RW端滑到第0值(参考图3)的情况,此时RH、RL、RW引脚都连接在一起,数字电位器输出最小电阻0.04 kΩ,根据式⑴,0.41×(1+0.04/10)得到电压值约0.41 V,该电压值小于0.8 V,直流电机控制器无法进入待机工作状态,因此电路设计时加入起始电阻R3阻值为9.6 kΩ,X9C104初始化后根据式⑴可得:0.41×[1+(9.6+0.04)/10]=0.81 V,直流电机控制器正常进入待机工作状态。通过控制CS、U/D、INC数据总线调整X9C104的RW端,RW端每调整一次为1.01 kΩ,从0.04 kΩ到70 kΩ可以滑动70次,说明了直流电机控制器可以输出多达70档的速度,电机转速可以做到很平稳的变速运转。
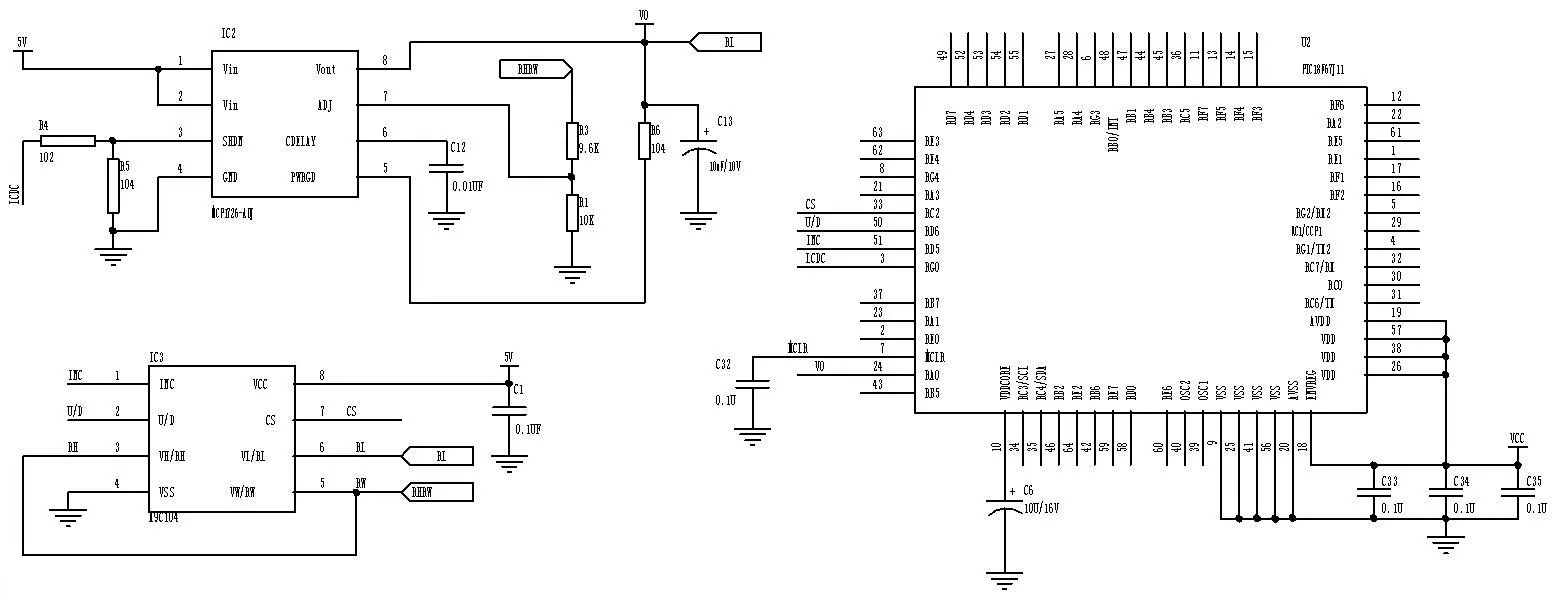
图6 数字电位器硬件控制电路设计
5 AD转换跟踪设计
判断ADJ开关电源模块输出的模拟量信号V0(参考图6)是否达到预期值,就需要跟踪读取输出模拟量信号的电压值,单片机PIC18F67J11的RA0引脚是AD转换模块AN0通道,通过配置AD转换模块的功能属性,开启AD转换功能,实时跟踪模拟量信号,将模拟量信号转化成数据格式,通过软件进行计算和比较,确定是否达到预期值,若与预期值不相符,则软件重新控制调整数字电位器的输出电阻阻值,做到精准控制直流电机控制器。
6 结束语
在新能源无人船动力电机的直流无刷双模控制器设计中,采用ADJ开关电源模块输出模拟量信号作为控制信号,满足了0.8~3.6 V电压范围,通过单片机控制数字电位器,实现多档可调输出,使电机转速变化更加平稳,应用AD转换跟踪技术实现精准控制。本文分析了基准电压原理,使模拟量输出范围更宽,并通过软件设计和硬件设计相结合,在无人船动力电机应用中取得很好的控制效果,可靠性高,具有较高的经济价值。