中低速磁浮交通轨道结构变形特性研究
2023-08-16李亚敏
李亚敏
(长沙穗城轨道交通有限公司,湖南 长沙 410000)
中低速磁浮交通系统采用常导电磁吸式技术,实现磁浮车辆与轨道之间保持8mm 悬浮间隙的稳定无接触运行,具有无摩擦、振动小、安全性高、绿色低碳等优势,具有很好的市场前景。中低速磁浮交通系统轨道结构作为支承、传递车辆载荷的基础,其整体结构必须具备足够的刚度和强度;上部轨排作为车辆与轨道之间动力相互作用的界面,必须保持足够精度的几何形状与位置,因此轨道结构及部件必须具有足够高的可靠性和耐久性,从而保证交通车辆能够长期安全、稳定、舒适运行。
针对中低速磁浮交通系统轨道结构性能分析,国内很多学者开展了相关研究。刘建超、赵春发[1]等分析了温差和列车载荷作用下的中低速磁浮轨道结构的竖向和纵向位移响应;朱晓嘉[2]等分析计算了中低速磁浮试验线轨道梁的强度性能;屈超广[3]等基于橡胶超弹性理论分析了中低速磁浮轨道扣件的垂向静刚度;杨光[4]通过理论分析研究了中低速磁浮试验线和长沙磁浮机场线中简支梁的系统动力响应;李伟强[5]等分析了墩柱沉降、梁体竖向转角和梁体竖向错台引起的中低速磁浮轨道F 轨竖向变形;刘鸣博[6]等研究了钢箱梁顶面和底面间温度差的概率分布特征。为了评估中低速磁浮轨道结构的变形特性,本文以长沙磁浮快线轨道结构为基础,通过建立箱型轨道梁模型,仿真计算不同载荷作用下的轨道结构的变形特性,并通过设计规范进行对比校核,以确定是否满足运行要求。
1 中低速磁浮轨道梁结构
长沙磁浮快线轨道结构为HSST 系统箱型简支梁结构形式,整体结构由轨排系统、接头、扣件、承轨台和混凝土梁组成,其中轨排系统包括F 轨、轨枕、铝反应板和连接螺栓等组成。具体轨道结构如图1 所示。
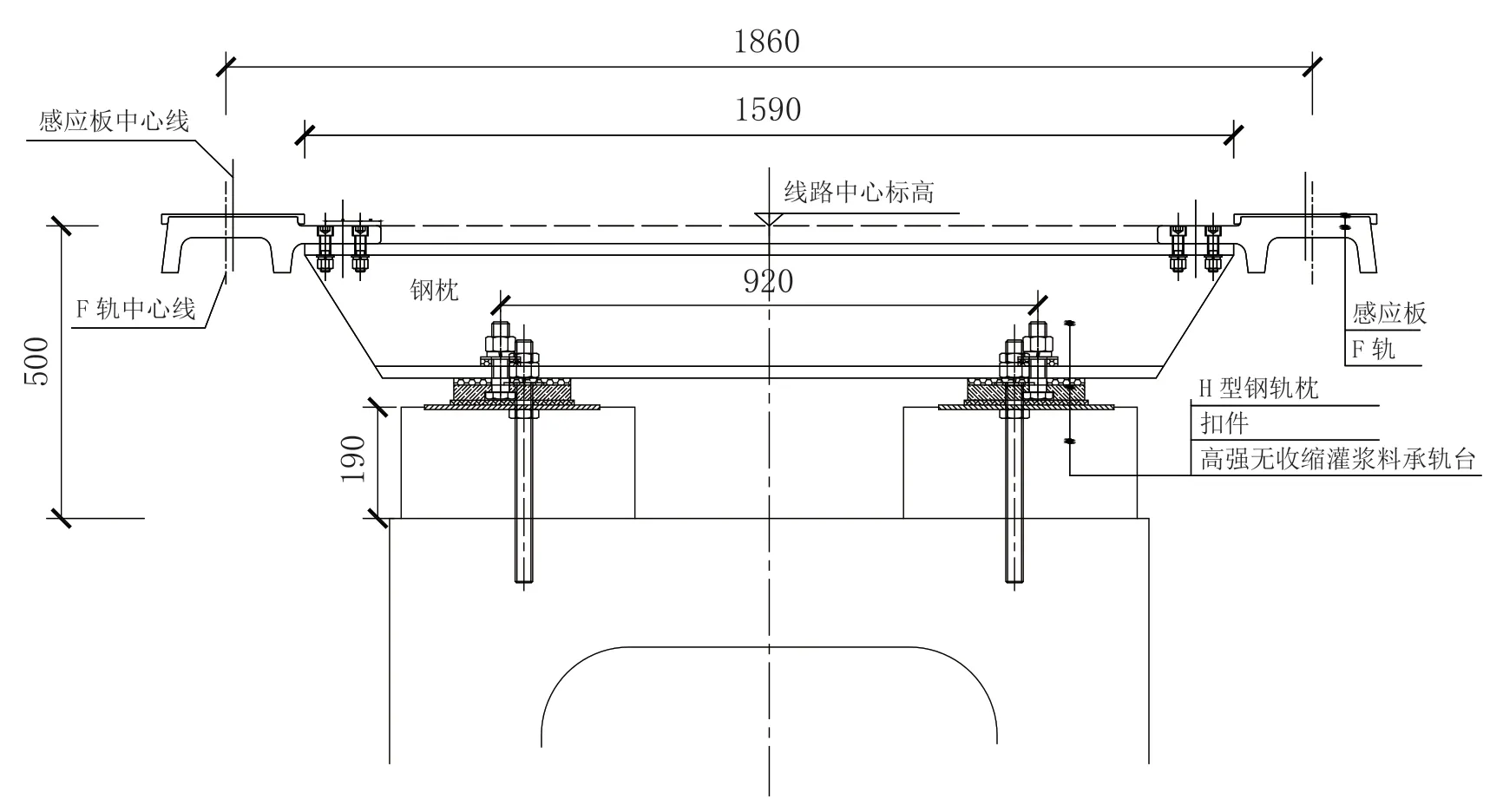
图1 中低速磁浮轨道结构图
本文分析对象为25m 跨度的混凝土箱型轨道梁结构,轨道梁采用C50 混凝土预制,承轨台采用C40 混凝土浇筑。本文基于虚拟样机技术建立了25m 跨度的中低速磁浮整体轨道梁结构分析模型。
2 轨道梁结构计算载荷
列车在各种工况下主要需要考虑动、静态载荷及分布情况、动力系数等,在竖向上轨道所受载荷主要分为三种工况:静浮状态稳定悬浮工况下荷载、静止状态滑橇支撑工况下荷载及静止状态支撑轮支撑工况下载荷。
2.1 静浮状态稳定悬浮工况下荷载
磁浮列车悬浮状态载荷指的是在整车悬浮状态下,轨道结构所承受的竖向力,悬浮力的荷载值及其分布如图2 所示。
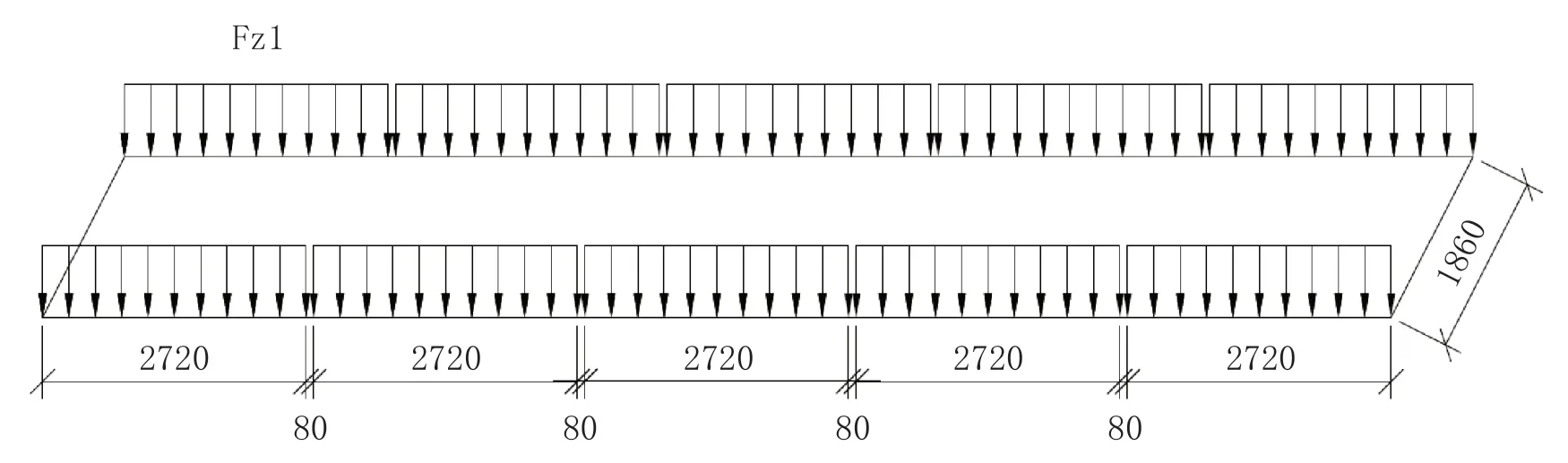
图2 悬浮状态载荷图
该荷载是指磁浮列车正常静止悬浮状态下轨道所受荷载。该荷载在列车悬浮时候均匀分布在5 个悬浮架上,磁浮轨道所受荷载近似于均布线性荷载作用。超载状态下,均布载荷Fz1=25.8kN/m(根据满载状态下车辆总重35t 计算)。
按照《中低速磁浮交通设计规范》[7]要求,列车运行过程的活载动力系数计算公式如下:
式中,L 为桥梁跨度。
当简支梁的跨度为25m 时其动力系数为1.267,因此本报告采用1.0、1.3、1.5 倍磁浮列车静浮状态下悬浮载荷来分析轨道结构变形。
2.2 静止状态滑橇支撑工况下荷载
静止状态滑橇支撑工况下荷载是指磁浮列车静止停放在F-轨上方时,车辆通过垂向滑橇直接作用于F-轨上的竖向力(即车重和有效荷载之和),如图3 所示。磁浮车辆转向架的前后垂向滑橇间距为2510mm,单个垂向滑橇的支撑力为17.5kN,整节车辆重力为 350kN。
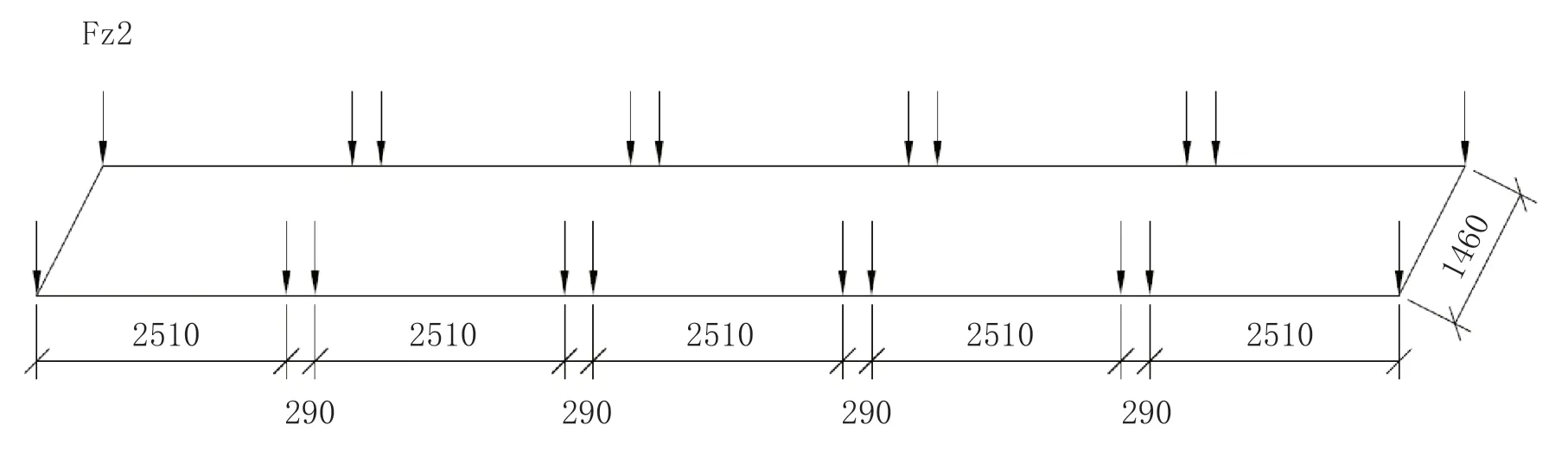
图3 静止状态滑橇支撑载荷图
2.3 静止状态支撑轮支撑工况下载荷
静止状态支撑轮支撑工况下载荷是指磁浮列车由支撑轮支撑在F-轨上的竖向力,如图4 所示。同一悬浮架前后液压支撑轮的间距为2080mm,单个滑轮的支撑力为10.5kN。
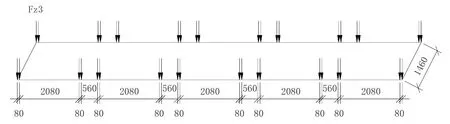
图4 静止状态支撑轮载荷图
3 轨道梁结构变形特性分析
3.1 静浮状态稳定悬浮荷载作用下轨道结构响应
通过计算,轨道梁的变形呈现为U 型,静浮状态稳定悬浮荷载作用下F-轨的垂向位移最大值为4.125mm。由于F-轨处在轨道结构的左右两边,在车辆悬浮载荷的作用会出现向外倾斜,即F-轨内外侧磁极面会出现垂向的位移偏差。
通过数据分析,F 轨垂向位移和最大位移差出现轨道结构的跨中处,F 轨外侧磁极面的最大垂向位移为4.125mm,内外侧磁极面垂向最大位移差为0.283mm。在1.3倍悬浮荷载工况下,F轨的最大垂向位移为5.405mm,内外侧垂向位移差为0.368mm。在1.5 倍悬浮荷载工况下,F 轨的最大垂向位移为6.236mm,内外侧垂向位移差为0.425mm。在上述工况下,F-轨的内外侧垂向位移差小于抑制悬浮架侧向滚动的规定限值0.5mm[8]。
3.2 静止状态滑橇支撑工况下轨道结构响应
通过对静止状态滑橇支撑工况下轨道结构动态响应分析,车辆垂向滑橇在F-轨接触点的垂向位移较大,F-轨的最大垂向位移为3.53mm。静止状态滑橇支撑工况下F-轨磁极面的最大垂向位移差为0.233mm,小于抑制悬浮架侧向滚动的规定限值0.5mm[9]。
3.3 静止状态支撑轮支撑工况下载荷
通过分析,支撑轮与F-轨接触处的垂向变形较大,F-轨的最大垂向位移为3.278mm。车辆静止状态支撑轮支撑工况下载荷作用下F-轨的磁极面的最大垂向位移差为0.154mm,小于抑制悬浮架侧向滚动的规定限值0.5mm[10]。
4 结论
本文以长沙磁浮快线轨道结构为基础,基于虚拟样机技术建立了箱型轨道梁有限元模型,仿真计算了在磁浮车辆悬浮荷载、滑橇载荷和支承轮载荷作用下的轨道结构的变形特性,得到以下研究结论。
在车辆静止稳定悬浮荷载作用下、1.3 倍和1.5 倍车辆静止稳定悬浮荷载作用下,F 轨最大垂向变形为6.236mm,F-轨的磁极面最大垂向位移差为0.425mm,均符合设计规范要求。
在车辆静止状态滑橇支撑和支撑轮支撑工况荷载作用下,F-轨最大垂向变形为3.53mm,F-轨的磁极面最大垂向位移差为0233mm,符合设计规范要求。
上述工况下的F-轨磁极面垂向位移差还具有一定的优化空间,后续可通过进一步优化结构尺寸降低建设成本。
