月基引力波探测进展与展望
2023-08-11吴铠岚林栩凌郑永超王运永霍红庆牛家树贾建军张晓敏
吴铠岚,林栩凌,郑永超,黎 明,边 星,王运永,霍红庆,牛家树,贾建军,张晓敏
(1.北京空间机电研究所,北京 100094;2.兰州大学 物理科学与技术学院,兰州 730000;3.航天东方红卫星有限公司,北京 100094;4.中国科学院 力学研究所,北京 100190;5.中国科学院 高能物理研究所,北京 100049;6.山西大学,太原 237016;7.中国科学院 上海技术物理研究所,上海 200083;8.北京紫微宇通科技有限公司,北京 100190)
引 言
早在1916年,爱因斯坦便根据弱场近似预言了引力波的存在;而直至2015年,人们才第一次探测到引力波信号,即引力波事例GW150914。引力波信号的首次观测这一里程碑事件,进一步激发了人们对引力波探测的热情。此后提出的空间引力波探测方案,进一步扩展了可探测的频段,使得人类有可能探测低频引力波信号。然而无论是地面引力波探测抑或是空间引力波探测,都缺乏探测0.1 Hz处引力波信号的测量手段。地面引力波探测任务,如激光干涉引力波观测站(Laser Interferometer Gravitational-Wave Observatory,LIGO)和室女座引力波天文台(Virgo)等着力于探测10~103Hz频段的引力波信号,对应的主要天体波源有双黑洞合并、双中子星合并以及黑洞–中子星系统;后续的地面探测任务如 “ 爱因斯坦望远镜 ”(Einstein Telescope,ET),将会进一步将探测频段扩充到5 Hz[1]。而空间引力波探测任务如“激光干涉测量空间天线”(Laser Interferometer Space Antenna,LISA)、“天琴”和“太极”等,将关注mHz频段引力波信号的探测,对应的主要天体波源有致密双星系统、大质量双黑洞并合系统、极大质量比双黑洞旋转系统、星团中的中等质量黑洞、原初背景引力波以及宇宙弦等量子引力来源的瞬时波源[2]。此外,还有针对于nHz频段的脉冲星计时阵列[1,3]。为更好地探测0.1~5 Hz频段处引力波信号,月基引力波探测方案被提出,即在月球表面搭建引力波探测器。由此可以探测0.1~5 Hz频段对应的由致密恒星天体和白矮星组成的恒星质量双星、中等质量黑洞以及随机引力波背景等波源[4]。分,月球上的大气压在10−8Pa,可与LIGO的真空环境相媲美;在日落之后,月球上的大气压更是会下降到10−10Pa[5]。这一天然的高真空环境,可减少建设与维护
相较于已有的引力波探测计划,月基引力波探测存在诸多优势。①月球表面的地震噪声更为微弱,在0.1~5 Hz频段处,月球的地震噪声比地球的地震噪声至少小3个量级[1]。而反观地面引力波探测,以“先进LIGO”(advanced LIGO,aLIGO)为例,在≤10 Hz的频段,地震噪声将占主导地位,由此限制了探测器的测量精度。②月球具有天然的真空环境。在日出时真空设备的支出。同时,由于月球良好的真空环境,可凭借最小的代价来延长月基引力波探测器的臂长,此时探测器臂长仅受到月球半径约束。③相比于地球表面的引力波探测器,月基引力波探测所受到的引力梯度、潮汐影响更小。此外,对于月基引力波探测,自然因素的干扰也更少。④相比于地球表面的引力波探测器,月基引力波探测器基本不会受到人类活动的干扰,其所处的环境更为安静,受到的影响更少。⑤相比于空间引力波探测器,月基引力波探测器更加便于维护;可由地面以及月球实验基站对其运行状态进行监控,对故障进行检修,且可对月基引力波探测器进行升级改造,有效延长探测器的工作周期。⑥月基引力波探测频段在较低频段处(0.1~5 Hz),其数据传输率仅比空间引力波探测任务大一个量级[1],较易于传输。总而言之,相比于地面引力波探测,月基引力波探测受到的环境影响因素更少,探测灵敏度更高;相比于空间引力波探测,月基引力波探测更易于维护,工作周期更长。同时,由于环境干扰极少,月基引力波探测可保证在任务周期内全天候运行。此外,将月基引力波探测结果与地面引力波探测结果相结合,可以有效提高地面引力波探测的角分辨率。
在月球表面建造引力波探测器,除了用于探测0.1~5 Hz频段处引力波信号,部分月基引力波探测方案通过特殊的设计还可用于进一步了解月球的地质结构。月基引力波探测器的测量结果可用于了解月壳和月幔的性质、探索月壳和月幔中其它尚未发现的层和异常区的位置、探索月球核心的位置和状态,以及了解月震源的地理和深度分布。
本文将主要介绍月基引力波探测现状,关注其探测原理和方法。同时讨论月面建造引力波探测器可能面对的关键问题,并给出可能的解决方案。
1 引力波描述及特性
在广义相对论中,时空并非是平直的,有质量的物体会导致时空的弯曲,此时引力将被视为物质对时空弯曲的一种响应,是时空弯曲曲率的一种表征。借助黎曼几何方法与广义协变原理,爱因斯坦建立起了表征时空性质与物质及其运动相互关系的广义相对论方程,即爱因斯坦引力场方程[6]
其中:Gµυ为爱因斯坦引力张量;Rµυ为二阶里奇张量;R为曲率标量;G为引力常量;c为光速;Tµυ为能量动量张量;gµυ为度规张量。广义相对论中以黎曼几何来描述时空,其线元表达式为[6]
其中:时空度规张量gµυ用于描述时空结构;x0=ct;xµ(µ=1,2,3)是空间坐标。当考虑弱场近似,此时时空度规张量可视为平直时空度规ηµυ加上微扰hµυ[6-7]
将式(3)代入引力场方程(1)可得弱引力场下的线性爱因斯坦方程
其中:
□为达朗贝尔算子,表达式为
在真空情况下,Tµυ=0,由此弱引力场下的线性爱因斯坦方程变为
在横向无迹(Transverse-Traceless,TT)规范下
由此弱引力场下的线性爱因斯坦方程可化为
方程(9)最简单的解就是平面波解。此后再引入TT规范,可得hµυ表达式[6]
式(10)实际上就是引力波满足的解,它表征了沿z方向传播、波速为光速c的引力波。其中h+、h×对应了引力波的两个极化方向,二者皆垂直于引力波传播方向。
由此可见,引力场的扰动在宇宙中的传播形成了引力波,或者说,引力波是弯曲时空的涟漪。此外,由式(10)可以得到引力波的一些特性[6]:①引力辐射的一阶项是质量4极矩随时间变化时发射的;②引力波是横向无迹的,它有2个极化方向h+、h×,二者皆垂直于引力波传播方向;③引力波以光速传播;④引力波信号非常微弱。引力波探测对宇宙学的发展有着重要意义,它可以向我们提供宇宙深处的信息。
2 月基引力波探测现状
1972年,旨在探测引力波的月球表面重力仪实验凭借“阿波罗17号”(Apollo 17)任务得以在月球表面进行,但因技术原因导致仪器出现故障,使得所测数据无效[8]。近年来,美国国家航空航天局(National Aeronautics and Space Administration,NASA)重启的“阿耳特弥斯”(Artemis)计划,以及美国太空探索技术公司(Space X)和蓝色起源公司(Blue Origin)在内的航天公司正在进行的一系列商业航天计划,使得在月球上建立引力波探测基站成为了可能。下文将对月基引力波探测的发展现状进行介绍,讨论分析已有的月基引力波探测方案。
2.1 宇宙学引力波月球观测站
2.1.1 探测原理
宇宙学引力波月球观测站(Gravitational-Wave Lunar Observatory for Cosmology,GLOC)由美国范德堡大学(Vanderbilt University)的Karan Jani和哈佛大学( Harvard University)的Abraham Loeb等提出,该方案考虑在月球表面建立正三角形激光干涉仪引力波探测器,干涉仪臂长40 km,如图1所示[1]。该探测器包含3个基站,每个基站包含有1个激光器和2个测试质量。由式(10)可知,当引力波信号经过时,其极化性质会导致两极化方向h+、h×的时空发生畸变,进而引起干涉臂的光程变化。考虑h+极化方向,当引力波经过时,其应变强度可表示为[6]
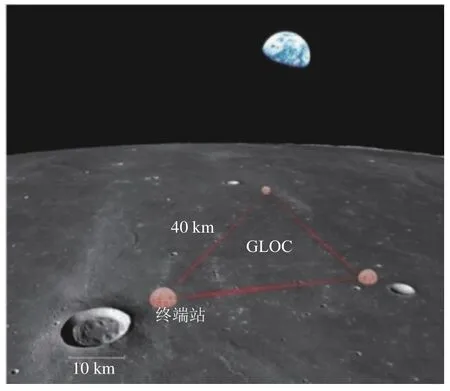
图1 GLOC示意图Fig.1 Illustration of GLOC detector
其中:δL为引力波造成的微小臂长变化。常规情况下探测器会工作在暗纹状态,这一微弱变化会改变光束的相位,进而破坏两相干光初始的相消条件,此时光电探测器可接收到信号;对这一信号进行解调可获得引力波信号[6]。
2.1.2 探测灵敏度与探测目标
GLOC与其它地面引力波探测器和空间引力波探测器的灵敏度对比如图2所示[1]。

图2 各探测器灵敏度对比Fig.2 Gravitational-wave sensitivity of different detectors
由图2可得,GLOC的设计分为保守设计和优化设计。其中保守设计探测频段低频极限为1 Hz,而优化设计低频部分可达到0.25 Hz。为达到优化的设计,即探测频段低频达到0.25 Hz,需要考虑一种新型的悬挂方式。一种可能的设计是令测试质量处于自由落体。对于1 Hz以下,GLOC的灵敏度主要受到月震噪声和悬架热噪声影响。预期的月震噪声要比地面引力波探测器受到的地震噪声小3个量级;而由于月球表面的低重力环境,预期的悬架热噪声也会比地面探测器至少小3倍[1]。对于热噪声的进一步压制将着力于镜面热噪声的减小,具体实施方法为采用针对于低温探测器的镜面镀膜。
GLOC的可观测天体波源如图3所示[1]。在可观测阈值之内,即信噪比(Signal to Noise Ratio,SNR)≥8的情况下,GLOC预期能够在可观测宇宙的70%范围内探测中子星以及恒星质量黑洞的合并。
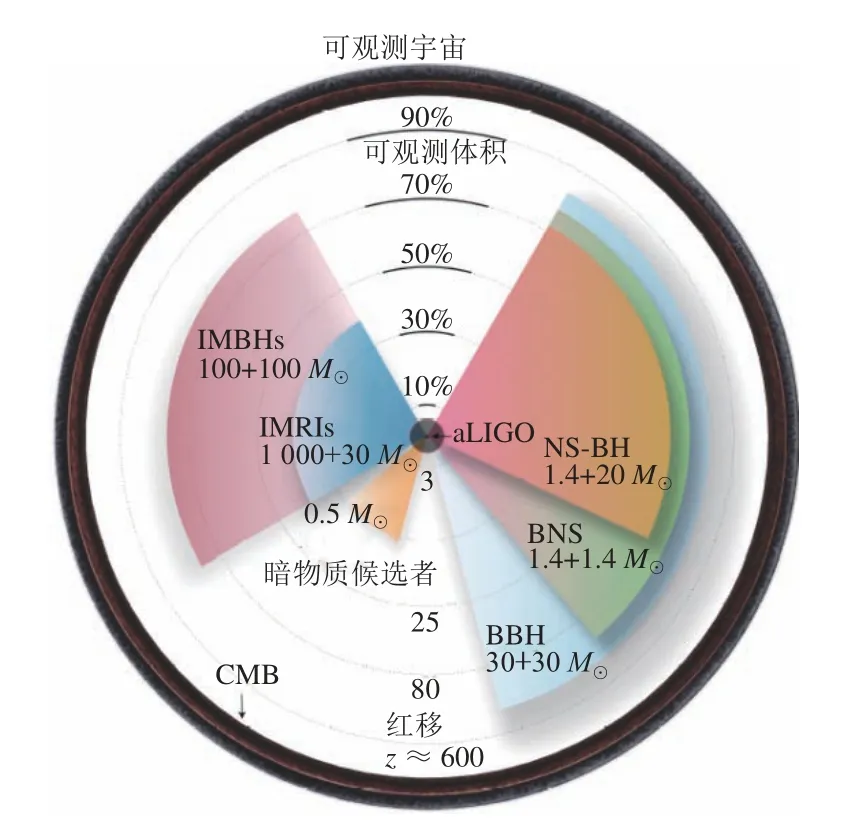
图3 GLOC可观测的天体引力波源Fig.3 Gravitational wave sources observable by GLOC
如图4所示为SNR=100时的各探测任务可探测半径的对比[1]。其中横轴为对应双星系统的总质量,纵轴为SNR=100时的探测半径。其中黑色和灰色的实线分别代表GLOC探测器的优化情况和保守情况下的探测灵敏度;而虚线代表各空间引力波探测任务;各蓝色曲线代表各地面引力波探测任务。由图4可得,在GLOC可测量的整个天体波源质量范围内,它的灵敏度要优于地面引力波探测器CE (Cosmic Explorer)、ET(Einstein Telescope)和aLIGO,且在部分区间灵敏度优于空间引力波探测器LISA。
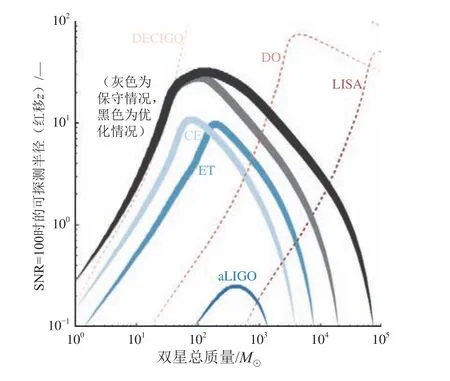
图4 高信噪比探测任务Fig.4 High signal-to-noise ratio detection
2.2 月球引力波天线
2.2.1 探测原理
月球引力波天线(Luna Gravitational Waves Antenna,LGWA)是由意大利格兰萨索科学研究所(Global Strategic Study Institute,GSSI)的Jan Harms主导提出的,旨在对1 mHz~10 Hz频段引力波进行探测的月基引力波探测计划[8],如图5所示。该计划以月球整体为天线感受引力波引起的潮汐力,以潮汐力引起的月球振动为直接观测效应,其本质与韦伯棒类似。月球部分本征振动模态与已知引力波源的频段重叠,以月球作为天线的引力波探测设想在1970年代已出现,随后出现了基于该设想的各种探测方案。LGWA也是基于该设想的方案。LGWA的主要方案特点是:①以4个高灵敏度月震仪构建km规模的局部传感器阵列,而非以往在单个地点或在全月球布置传感器的方案,可以通过对4个传感器数据的处理将引力波与引发月球振动的部分其它效应相分离;②月震仪阵列部署于月球南极附近大型撞击坑所形成的永久阴影区内。
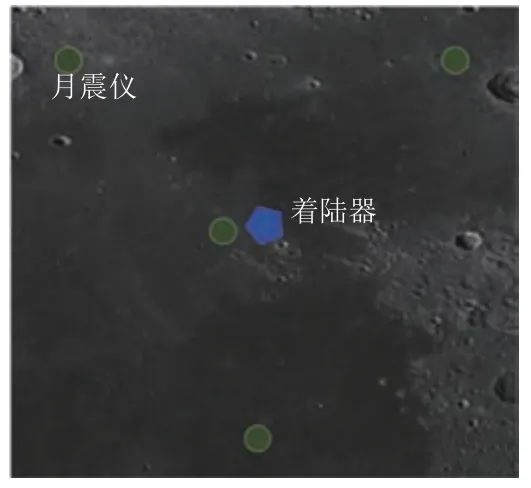
图5 LGWA任务探测器示意图Fig.5 Illustration of LGWA detector
LGWA月震仪计划采用一维低频谐振子检验质量、激光干涉位移读出、超导量子干涉器件(Superconducting QUantum Interference Device,SQUID)位移读出与超导磁力反馈相结合的基本方案。将其部署于永久阴影区内主要出于以下几点考虑:①永久阴影区内环境温度永久低于30 K,且波动远小于月球其它区域,可为传感器提供稳定的温度环境,降低传感器中温度波动相关的噪声和热噪声;②SQUID和超导电磁力反馈机构需要低于5 K的工作温度,在温度30 K的环境中可以较小的代价达到目标温度;③永久阴影区内热应力引起的月面振动和倾斜远小于月球上有光照的区域,可减小环境振动和重力场耦合对振动测量的干扰。部署于月球永久阴影区内的低温光学和超导传感器阵列,是LGWA计划的主要技术特点。
在核心技术要求方面,LGWA移读出分辨率要求为10−15m/量级,谐振子检验质量品质因数要求不小于1 04。目前,激光干涉位移读出和SQUID位移读出技术分别在20 Hz和0.1 Hz以上频段已达到要求,正在进行低频噪声抑制方面的研究工作;检验质量谐振品质因数与需求差距较大,主要受现实验系统中常温磁力反馈机构引起的涡流损耗限制,在改用超导磁力反馈机构后有望达到104~106。此外,LGWA还需要解决永久阴影区内的长期能源供应、低至5 K的无振动深低温制冷以及温度敏感部件的温控等关键技术问题。
相对于其它引力波探测方案,LGWA有较宽的测量频段,不需要专门建设引力波天线,仅需部署4个高分辨率月震仪,在科学目标和实现难度上具有一定优势。LGWA计划在2035年前后完成建设,虽然方案相对简单,但仍是十分宏大复杂的工程,涉及科学目标确定、方案设计、关键载荷研制、月面部署、运行维护等方方面面,仅依靠欧洲的力量实现难度很大。因此,除作为主体的欧洲科研人员外,LGWA积极寻求国际合作,引入了来自美国、中国和印度等国的研究力量。中国团队目前主要参与引力波科学、SQUID位移传感、超导磁悬浮、激光光源等研究工作,并正在积极融入更多的研究领域。LGWA团队对中国月球探测计划有浓厚兴趣,借助中国月球探测计划和中国在月球探测中积累的技术实现LGWA设想是其重要的努力方向。
LGWA中月球其本身是对引力波造成扰动的响应主体,对引力波应变幅值的响应表示为[8]
其中:h(f)为引力波应变幅值;f为引力波信号频率;Ln为有效基线长度;Qn为品质因数;fn为月球的n阶振荡四极模式的模式固有频率;i为虚数单位,fn和Qn都与月球内部结构相关。当引力波信号频率与某一个模式的频率相等时,则此模式下的响应可表示为
可见探测器对引力波信号的响应大小与有效基线Ln和品质因数Qn相关。
2.2.2 探测灵敏度与探测目标
对于LGWA探测器,其探测器构造为月震仪阵列。则LGWA灵敏度也受到月震仪读出灵敏度和月震噪声影响。对于月震噪声,其主要可分为4类[1,9]:
1)可能由潮汐造成的深月震(Deep Moonquakes);
2)在月球表面以下数十km的浅月震(Shallow Moonquakes);
3)热月震(Thermal Moonquakes);
4)陨石撞击引起的月震。
受益于月球表面环境,月震噪声会比地震噪声小数个数量级。预期的主要月震噪声来源于陨石撞击引起的月震,但对于待测频段,该噪声水平低于测量灵敏度。
LGWA的基础噪声谱密度可通过将读出噪声除以式(12)中对引力波的响应来得到。仍然取品质因数为300,且将月球模型简化为均质体,则可得到LGWA的频谱灵敏度图像,如图6所示[8]。图6中考虑了LGWA的2种月震仪设计方案,且将其与空间引力波探测任务LISA进行比较。

图6 LGWA预期的噪声谱密度Fig.6 Predicted noise spectral density of LGWA detectors
图6中虚线代表空间引力波探测任务LISA的噪声谱密度曲线;蓝线代表LGWA的低温磁悬浮方案;红线代表LGWA的光读出机械悬挂方案。对于低温磁悬浮方案,测试质量由磁场束缚,而位移变化通过超导量子干涉设备读出,该方案需要运行在低温环境下,预期温度需要达到9 K。对于光读出机械悬挂的方案,测试质量由弹簧等机械结构悬挂。位移变化由激光干涉测量得到。该方案对温度无特定要求,但仍需考虑机械结构的稳定性和热膨胀噪声影响[8]。由图6可知,对于高于0.1 Hz的频段,LGWA 2种方案的噪声水平都要优于LISA。
此后考虑LGWA对随机引力波背景的响应,LGWA对于随机引力波信号测量的灵敏度一般以能量密度单位表征,该能量密度单位与标准宇宙学模型中的临界能量密度相关。对于LGWA,其灵敏度可表达为[8]
其中:H0为哈勃常数;Tobs为总观测时间,测量引力波能量密度的噪声估计结果如图7所示[8],仍然考虑2种悬挂读出方案,其中总观测时间Tobs为3a。

图7 LGWA预期随机引力波背景测量灵敏度Fig.7 Predicted sensitivity of stochastic gravitational-wave backgrounds measurement for LGWA
此外,考虑白矮双星系统为引力波源,该双星系统辐射的引力波的波形是可预测的,且引力波频率会缓慢增加。此时引力波幅值的极小值可表示为[8]
其中:S0为信噪比,取S0=1;Tobs为5 a,可得LGWA对于近似单调的引力波信号测量的灵敏度,如图8所示[8]。
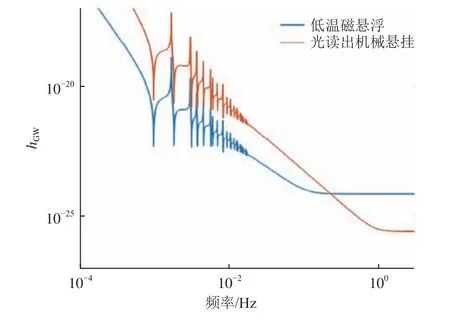
图8 LGWA预期近似单调的引力波信号的测量灵敏度Fig.8 Predicted sensitivity of near-monotonic gravitational-wave signals measurement for LGWA
LGWA可探测的引力波源包括恒星双星系统、Ia超新星、大质量与超大质量双黑洞系统等;此外,月球的起源和月球内部结构目前尚无定论,LGWA探测器还可以帮助人们进一步探究月球。当前对于月球的起源,一种较为合理的解释是月球起源于原始地球与太阳系内另一个火星大小的星体之间的碰撞[8,10];而对于月球的内部结构,可能的构造示意图如图9所示[8],其内部结构或许可以分为月壳、月幔和月核;此外,图9还给出了浅月震和深月震的可能震源。尽管“阿波罗”(Apollo)计划所获得结果使得我们对月球的结构有了一定的了解,但仍有许多值得探索的未知之处。而对月球内部结构的探索正来源于对月震的研究,月基引力波探测器LGWA的建立,可测量更为精确的月震数据,让我们进一步了解月球,构建更好的月球和月震模型。

图9 月球结构示意图Fig.9 Illustration of Moon structure
2.3 月球地震和重力天线
月球地震和重力天线(Lunar Seismic and Gravitational Antenna,LSGA)由意大利的研究人员提出,该方案通过探测引力波引起的月震应变来探测引力波信号。LSGA的实施方案有2种,分别是一种基于相干后向瑞利散射的分布式光纤传感系统和一种“L”型的激光干涉仪[11]。
对于LSGA分布式光纤传感系统方案,该方案以“L”型部署两根长50 km的光纤光缆,两光纤光缆连接于共同的中心基站,此后采用窄线宽强相干光脉冲输入两光纤光缆,借助相干后向瑞利散射来测量引力波造成的月震应变,由此探测引力波信号,如图10所示[11]。基于该测量方法,当发送一个100 ns的脉冲,频率取2 kHz,每10 m取一次平均,每25 cm采一次样,测量后向散射光的相位和幅值,可等效于得到1万个独立的“传感器”。此外,该系统还可用于研究月球结构和月震源。该方案包含一个先行阶段,部署一个臂长为100 m的分布式光纤传感系统;此后在第二阶段中最终部署臂长为50 km的探测器[11]。
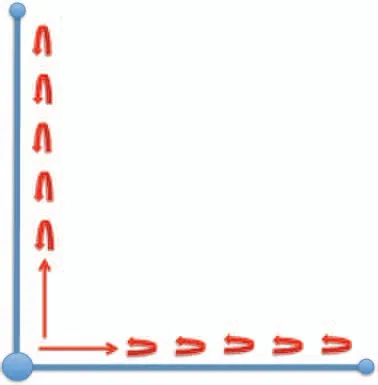
图10 分布式光纤传感系统示意图Fig.10 Illustration of the fiber distributed sensing system
对于类LIGO的激光干涉仪,探测器臂长为10 km,仍采用“L”型结构,如图11所示[11]。受益于月球表面的天然高真空环境和更少的环境干扰,探测器会拥有更高的探测灵敏度。该探测装置将部署在月球的南极,以尽可能减小月尘对探测的影响,同时保证稳定低温环境以减少热噪声。干涉仪两端装有角锥,激光由角锥反射回到中心的基站。中心基站装有2个望远镜,用以发射和接收激光。望远镜和角锥需要悬挂隔离,以减小环境噪声对结果的影响。该探测器探测灵敏度预计可达到10−16m/

图11 激光干涉仪方案示意图Fig.11 Illustration of interferometric LSGA detector
LSGA任务旨在探测1 mHz~3 Hz频段的引力波信号,对应的引力波源有致密双星合并,白矮星合并以及Ia超新星等。
3 关键问题
3.1 探测器月面选址
为了尽可能减小环境对月基引力波探测的干扰,应选取合适的位置部署探测器。月球表面的月尘对于精密仪器造成的影响不容小觑。此外,月面选址还需考虑月面温度变化、月球表面曲率、宇宙射线和电荷以及月球表面电磁场变化等因素。
月球表面昼夜温差较大,昼夜温度可差距数百K[12]。为获取一个稳定的低温环境,一个值得考虑的地点为月球南极的永久阴影区,该区域温度远低于100 K,且温度变化不大,可提供天然稳定的低温环境。月球南极的平均温度分布如图12[8,13]所示,选取永久阴影区,可以减小温度变化引起的探测器元件形变造成的热噪声,同时还可以降低热月震造成的地面运动对测量的影响。月基引力波探测任务如LSGA与LGWA都将考虑在月球南极部署探测器。
月球表面的月尘也需要纳入考虑,尤其是对环境敏感的装置元件。“阿波罗11号”(Apollo 11)地震仪运行过程中的过热便归咎于尘土的沉积[8]。故选址应将月尘纳入考虑,同时在设计探测器时应保证环境敏感元器件不会直接暴露在月球环境之中。
放置月面探测器时也需要考虑月球自身的曲率,对于月球表面传输40 km的光束,其经历的垂直落差会达到约450 m。为解决这一问题,可以考虑将探测器置于月球表面环形山或熔岩管内,如GLOC探测器[1,8]。这些典型的地点可以提供天然的平坦地面。
月球表面的空间辐射,比如宇宙射线,会造成电子设备的损坏。此外,宇宙射线会给月尘持续充电,从而产生显著的电场[8,14-15]。选址时亦需考虑宇宙射线和电荷的影响。
此外,LGWA和LSGA所应用的月震仪对于月球表面磁场的变化十分敏感。为减少环境磁场对测量结果的影响,探测器设计和选址都需将磁场涨落纳入考虑[8,11]。
3.2 月基引力波探测器的部署安装
月基引力波探测器的搭建通常需要以数km、数十km甚至更长的间隔搭建探测基站。以LGWA为例,LGWA第一阶段计划在月球风暴洋的西北边缘部署4台月震仪,由4台月震仪组成km范围的阵列。此后第二阶段将在月球背面与4台月震仪阵列相对的位置再放置1台月震仪;又比如GLOC探测器,其设计干涉仪臂长为40 km。为高效地投放材料和安装探测器,必须考虑一种有效的部署安装方法。可采用机器人着陆器方案(Lunette)[16],作为一种部署基站的可能方法。此外,还可以通过无人机和月球车对探测器进行投放安装。对于无人机方案,其优点在于不受地形影响,能快速到达预定地点。但是,月面为高真空环境,需要研发一种新型的推进和操纵系统使得无人机能在月球真空环境下运行;其次,需提升无人机的载重能力,以达到运输大型器件需求。月球车也是一个很好的选择,相较于无人机,其技术更加成熟,如图13所示[17]。但月球车行进较慢,且会受到月球表面形貌影响,可能无法到达预定的部署地点。

图13 用于部署探测器的月球车Fig.13 Rovers used in the deployment of detectors
此外,部署精度也需要考虑。以LGWA为例,LGWA探测器采用月震仪阵列,月震仪阵列中月震仪之间的相对位置需要满足测量需求。由此需要开展合适的导航定位系统研究,以指导探测器的投放部署[18]。
3.3 月震对于探测的影响
月基引力波探测优点之一是环境干扰少,月球表面的月震噪声更为微弱,在0.1 Hz~5 Hz频段处,月震噪声比地球的地震噪声至少小3个量级。而反观地面引力波探测,以aLIGO为例,在≤10Hz的频段,地震噪声将占主导地位,由此限制了探测器的测量精度。
但月震对于探测器探测结果的影响仍然存在,需纳入考虑。可通过悬挂等隔震措施减小月震对于测量的影响,或依靠合理部署探测器位置,如LGWA中月震仪阵列的部署方式,来降低月震噪声给测量结果带来的影响。
3.4 热噪声影响
热噪声亦是限制引力波探测器灵敏度的主要原因之一。如前文所述,月球表面昼夜温差较大,为减小温度变化带来的影响,可选取月球南极的永久阴影区作为探测器部署区域,该区域可为探测器提供天然的低温环境,且温度涨落较小[8,13]。
在低于1 Hz的频段,探测器灵敏度会受到悬挂热噪声限制。对于与地面探测器类似的悬挂装置,月基探测器受到温度涨落带来的悬挂热噪声影响要比地面减小3倍[1]。为进一步降低热噪声,可采用非传统的悬挂方式,或采用低温探测器所用镜面镀膜。
3.5 地月交流和数据传输
由于月基引力波探测器部署于月球表面,此时地月之间的信息交流和数据传输就显得尤为重要。探测器的部署、测量数据的获取都需要建立在快捷,高效的数据传输之上。以LGWA为例,为估计数据传输系统的需求,给出预估的第一阶段4个月震仪组成阵列的数据量和数据生成率,如表1所示,其中BW为带宽[8]。

表1 LGWA预估数据生成及传输量Table 1 Estimation of LGWA data generation and transmission rate
由表1可见,预估的地月之间数据传输量约为221 Mbit/d,这一数据传输量很容易达到。这也是月基引力波探测优点之一,数据率低,易于传输。
3.6 月基引力波探测的主要噪声来源
表2列出了月基引力波探测的主要噪声,包括了前文所提到的部分噪声源,并给出了噪声影响的可能量级[10,19-21]。表2的噪声分析主要针对LGWA月基引力波探测方案[10,19-21]。

表2 月基引力波探测中可能存在的噪声源Table 2 Possible noise sources in lunar-based gravity wave detection
4 结 论
月基引力波探测可测量0.1~5 Hz频段引力波信号,补充地面和空间引力波探测在0.1 Hz频段的空缺。此外,月基引力波探测器还可以用于研究月球地质环境和月球内部结构,使人类能够进一步了解月球。月基引力波探测受益于月球天然的高真空和低温环境,且有着相比于地震噪声更低的月震噪声影响、更少的自然因素和人类活动干扰,使得月基引力波探测器在其探测频段可以达到更高的探测灵敏度,是极具发展前景的引力波探测方式。但月面探测器的建造仍然存在关键性问题,探测器的月面选址、探测器的月面部署安装、地月间数据的传输、月震对于探测结果影响等,都有待进一步探索。未来,随着中俄国际月球科考站建设项目的推进,中国的月基引力波探测研究将持续开展相关前沿科学探索,必将催生更多原创性的科学成果。
