基于Hough变换检测前跟踪的水下多目标被动检测方法
2023-08-08王学敏于洪波张翔宇安舒李文海
王学敏, 于洪波, 张翔宇,2, 安舒, 李文海
(1.海军航空大学, 山东 烟台 264001; 2.中北大学 信息与通信工程学院, 山西 太原 030023)
0 引言
水下无人潜航器良好的适航性能、较低的辐射噪声,使其成为典型水下低可探测目标之一。随着水下无人潜航器集群的发展,其作战能力提升的同时,被探测的难度进一步加剧,正深刻影响着现代水下攻防作战的变革。在侦察可能存在水下目标的海域时,航空被动声纳浮标借助反潜机平台的高速机动优势以及先验情报,可以对来袭无人潜航器集群进行隐蔽高效探测,具有重要的研究意义和军事价值。
检测前跟踪技术(TBD)在低可探测领域发挥着重要作用。目前,国内从事相关研究的单位主要有北京电子工程总体研究所、南京电子技术研究所、哈尔滨工程大学、西安电子科技大学、海军航空大学、空军预警学院等单位[1-8],主要用于处理雷达、声纳、光电等传感器数据[1-8];研究方法主要涉及粒子滤波检测前跟踪(PF-TBD)、Hough变换检测前跟踪(HT-TBD)、动态规划检测前跟踪(DP-TBD)等算法[1-8];检测对象的适用范围也由空中飞行器为主,扩展到高超音速导弹及水下潜航器这一类更为隐蔽的目标。
针对水下低可探测性目标[31]检测的问题,国内外学者主要对PF-TBD、DP-TBD、HT-TBD等方法进行了可行性验证[8-12]。面临水下检测场景复杂问题,Yan等[13]、Northardt等[14]分别将PD-TBD用于复杂主、被动声纳场景中的弱目标检测。考虑传统PF计算量大、高维采样效率低等问题,胡健阳等[15]从粒子群优化角度、奚畅等[16]以粒子相对距离和法向速度均匀分布为准则,分别给出了优化的PD-TBD算法,一定程度上改善了复杂环境下的声纳微弱目标检测鲁棒性。相较于飞行器和导弹,水下目标航速较低,在较短的观测时间内,其航迹可以近似为线性,而DP-TBD、HT-TBD在处理非机动目标检测中具有更好的鲁棒性和实时性。文献[17]提出了基于改进DP的主动声纳序列图像检测方法,验证了DP-TBD算法对水下低可探测单目标检测的有效性。文献[18]将DP-TBD算法用于水下多目标主动声纳检测和跟踪,对航线远离或较远的多目标检测效果较好,但在航线交叉或较近的情况下,多目标检测效果将变差。文献[19]验证了HT-TBD算法用于主动声纳水下多目标检测的有效性。此外,在探测水下目标时,利用回波信号检测目标,目标信息丰富,但容易暴露;利用辐射信号检测目标,隐蔽性好,但目标信息较单一。这也使得目前国内外研究对象主要是主动声纳,而被动声纳隐蔽性检测研究方法不够丰富。
本文针对上述问题,通过合理的任务规划布放有效的航空被动声纳浮标阵,采用自适应交叉定位技术和双门限随机HT-TBD算法,对多个水下无人潜航器进行被动检测。根据航空被动声纳浮标阵拦截阵型,构建了水下无人潜航器被动检测模型;采用自适应关联交叉定位技术,实现了HT-TBD检测前的数据预处理;对预处理数据进行双门限随机Hough正映射,通过点数积累、能量积累、参数点合并、双门限判决、Hough逆映射等一系列处理,实现了水下多目标隐蔽可靠检测。方法流程及核心内容如图1所示。
1 水下无人潜航器被动检测模型
在开展检测水下无人潜航器的工作时,在较短探测时间内其运动模型可采用线性匀速或匀加速运动模型[19]。目前,航空声纳浮标探测深度通常涵盖无人潜航器的航行深度。以单线浮标拦截阵同深探测为例展开分析,其中,单线浮标拦截阵由共线等间距的Ns枚被动声纳浮标组成。在直角坐标系Oxy中,任一浮标位置坐标为(xsi,ysi)(i=1,2,…,Ns),相邻两枚浮标间距为d(见图2)。第i枚被动声纳浮标在第k(k=1,2,…,K)时刻的量测数据矩阵为

图2 浮标拦截阵探测水下目标示意图
(1)

(2)
sikj(θikj)为目标能量,cikj(θikj)为干扰噪声能量。
当量测点为目标时,由被动声纳方程可知,目标能量sikj(θikj)可表征为
sikj(θikj)=SL-TL-NL
(3)
式中:SL为目标声源强度;TL为传播损失;NL为背景噪声强度。不失一般性,TL采用近似柱面波条件。在声纳浮标阵覆盖这一较小探测区域、较短观测时间条件下,可以认为SL、NL近似不变。
当量测点为干扰噪声时,根据声纳浮标探测区内的信噪比ηDT,干扰噪声能量cikj(θikj)可表征为
(4)
式中:Sk为所有目标能量的平均值;δik为服从0均值的高斯分布。
TBD的优势在于积累多个时刻的量测信息来提高检测效益,第i枚被动声纳浮标在K个时刻内的数据可用元胞数组表示为Zi={zi1,zi2,…,zik,…,zik},其中zik为k时刻的量测矩阵。考虑水下无人潜航器航速较低,对K个连续量测点直接检测难以发挥TBD优势,而对整个量测期间获取全部量测交叉定位计算将影响检测效率。针对上述问题,首先对量测点采样;如果采样时刻量测点存在,则直接进行交叉定位预处理,否则采用内插外推方法[20-21]获取估计量测点,再进行交叉定位预处理。从而一方面可以降低交叉定位计算时间,提高计算效率;另一方面可以保证HF-TBD检测中输入点数的完整度,提高检测的可靠性。
2 自适应关联的多目标交叉定位
采用水下无人潜航器被动检测模型,在被动声纳浮标阵的作用范围内,通过各浮标获取的信号强度来确定用于检测的被动声纳浮标。遍历搜索信号强度最大的相邻2枚被动声纳浮标作为浮标检测组。在声纳浮标处理系统中自动切换至对应的被动声纳浮标,实现声纳浮标组的自适应关联。
步骤1选取量测矩阵中最大的能量信息,得到第k时刻信号强度最大时对应的浮标i′。
ei′k=max {eikj|i=1,2,…,Ns,j=1,2,…,Nik}
(5)
步骤2构建浮标积累矩阵N,初始值为0。当k≤K时,进行点数积累并存储到浮标积累矩阵。
N(i,k)=N(i,k)+1
(6)
步骤3设置判决门限为Ns/2,当积累次数大于门限时,选取对应积累单元的浮标,将其作为首枚检测浮标i*;否则对浮标i′能量信息进行求和,选取最大值对应的浮标作为首枚检测浮标i*。
(7)
步骤4根据式(7),选择e(i*-1)和e(i*+1)较大者作为第2枚检测浮标,由此构建声纳浮标组。
假设在被动声纳浮标组的共同探测区内存在两个目标,直接对其进行交叉定位处理[22-23]即可获取目标位置坐标,但位置坐标可能会有4种情况,如图3所示,随着时间推移,将产生虚假干扰航迹,增加后续HT-TBD检测的复杂度和难度。对于这种情况,采用启发式规则法[24]能够有效删除虚假量测点。删除虚假量测点的步骤为:首先根据同一方位仅有一个目标的原则,对探测区域内的量测点进行分组;其次,删除超出共同探测范围的位置点(虚假点2);最后,删除对应分组中的位置点(虚假点1)。

图3 被动声纳浮标阵探测多目标示意图
通过删除虚假量测点,得到k时刻声纳浮标i*的量测点位置坐标(xi*kj,yi*kj),其中,j=1,2,…,nk。因此用于HT-TBD检测的输入数据可以表示为Xkj=(xi*kj,yi*kj,ei*kj)T。
3 基于双门限随机HT-TBD的水下多目标检测方法
经过交叉定位完成预处理后,即可利用双门限随机HT-TBD方法检测水下无人潜航器集群。该方法的基本思想[25-27]:对交叉定位处理后的被动声纳浮标量测数据构建数据矩阵,同时建立参数积累矩阵并初始化;经随机Hough变换映射到参数空间,在参数空间进行点数积累和能量积累,并对参数点进行合并;设置点数和能量判决门限,对参数点进行门限检测;如果判决未通过,则重复上述过程;通过门限判决后,经过Hough逆映射得到水下目标的检测航迹。图4给出了双门限随机HT-TBD多目标检测流程图。
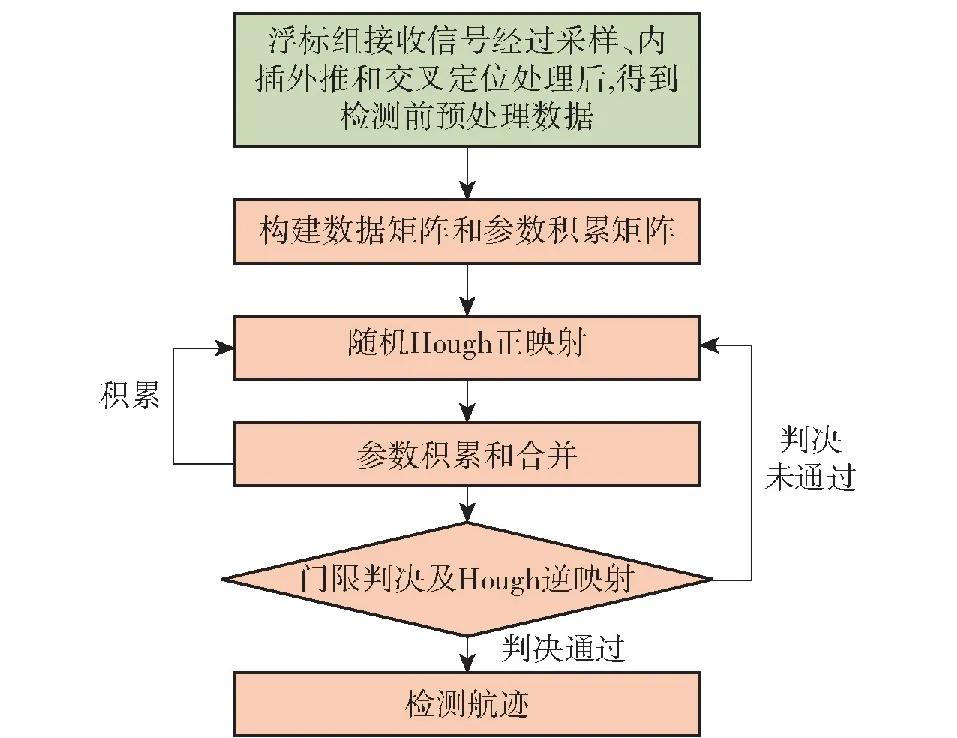
图4 双门限随机HT-TBD多目标检测流程
3.1 构建数据矩阵和参数积累矩阵
根据K个时刻声纳浮标组交叉定位预处理后的量测点,构建数据矩阵A,用元胞数组表示为
A={A1,A2,…,Ak,…,AK}
(8)

构建点数积累矩阵P和能量积累矩阵Q。其中,点数积累矩阵用于存储经Hough变换后参数点出现次数的积累数据,能量积累矩阵用于存储对应的能量积累数据,上述两类积累矩阵的初始值均为0。
3.2 随机Hough正映射
在数据矩阵A中随机选取两个元素点Xa∈Al和Xb∈Am作为一对数据点(Xa,Xb),其中,a=1,2,…,nl,b=1,2,…,nm,l,m=1,2,…,K且l≠m。(Xa,Xb)在数据空间中能够确定唯一直线,对其做Hough变换,获得参数空间中一个确定的参数点pi=(ρi,θi)。
(9)
式中: (xa,ya)=(Xa(1),Xa(2));(xb,yb)=(Xb(1),Xb(2))。
此时,参数点pi出现次数为P(pi)=1,对应的能量E(pi)=Xa(3)+Xb(3)。
3.3 参数积累及合并
重复3.2节步骤一定次数Nc,将得到的参数点pi(i=1,…,Nc)进行点数积累和能量积累,并存储到对应的点数积累矩阵P和能量积累矩阵Q。
P(pi)=P(pi)+1
(10)
Q(pi)=Q(pi)+E(pi)
(11)
考虑量测误差的存在,对积累后的参数点进行合并。设置距离门限δd,当两个确定参数点ρi、ρj之间的欧式距离小于δd时,可认为其来自同一条直线。
(ρi-ρj)2+(θi-θj)2<δd
(12)
取两个参数点的能量较大者作为新的参数点p*,并将其代替原来的参数点,同时将对应的积累点数加1,同步更新能量积累矩阵。
p*=max {E(pi),E(pj)}
(13)
3.4 门限判决及Hough逆映射
设置参数点积累门限δP和能量积累门限δQ,分别对参数点pi的点数积累值和能量积累值进行门限检测。门限检测判决条件为
(14)


完成检测航迹后,便可将数据矩阵中已选取的数据点删除,同时删除对应参数数组中的参数点,通过更新数据矩阵,提高实时检测的效率。
4 仿真实验及分析
4.1 参数设置
在水文条件良好、海底均匀的条件下,海洋环境背景噪声、沿各个方向的传播损失可近似认为不变,探测区域为20 km×20 km。水下无人潜航器集群做近似直线航行。水下无人潜航器集群由3台潜航器组成,初始位置分别为(7.5 km,7.0 km),(8.5 km,7.0 km),(9.5 km,7.0 km),初始航向均为60°,航速平均值为5 m/s。被动声纳浮标阵中首枚浮标声纳布设位置为(6.3 km,8.5 km),布设方向90°,作用距离为5 km,相邻浮标间距为1.2倍作用距离,测角误差为0.3°,交叉定位误差为50 m,误差类型为零均值高斯噪声。观测次数为5次,观测周期为20 s。判决门限δP、δQ分别取点数积累和能量积累最大值的0.8倍。以水下无人潜航器实际运动轨迹及声纳浮标实测数据为基础,对本文方法的检测性能进行仿真研究。
4.2 参数累积次数对检测性能影响
参数空间积累是本文方法实现中的重要一环。根据非相参数积累原理可知,积累次数增多,信噪比随之改善,目标的检测概率也随之增大。在噪声密度λ=100、信噪比为3 dB条件下,本文方法对不同积累次数的单目标进行100次Monte-Carlo仿真实验。规定检测概率为Pd=Nd/NTrace,其中,Nd为检测到目标航迹数之和,NTrace为总航迹数。综合考虑检测概率和运算时间来确定有效的积累次数。表1给出了不同积累条件下的检测结果,其中Na为积累次数。

表1 不同积累次数条件下的检测结果
由表1可以看出,随着积累次数的增多,检测概率随之增大,运算时间随之增加,与文献[28]中的分析结果相一致。当积累次数Na分别取3、4、5、6、7、8时,后者比前者的检测概率依次提高了15.2%、16.5%、4.8%、1.7%、-0.4%,对应的运算时间分别增加了2.7%、6.1%、11.5%、16.2%、8.9%。为了保证有效的检测概率和高效的运算时间,本文采用Na=5展开研究。如果输出航迹中至少含有4个目标点迹,则认为输出航迹含有目标航迹,即检测到目标。
4.3 噪声密度对检测性能影响
噪声密度是衡量水声环境复杂性的主要因素之一。采用4.1节参数设置,在信噪比为5 dB、噪声密度λ=100条件下进行仿真实验。首先对声纳浮标观测数据进行交叉定位预处理,该条件下噪声与目标点迹分布如图5(a)所示。之后根据3.1~3.4节步骤对预处理后的数据进行处理,得到图5(b)所示的检测结果。图5(b)表明了本文算法对水下多目标检测的可行性。

图5 λ=100时检测示意图
在其他参数不变的条件下,增加噪声密度λ=200进行仿真实验。预处理后的噪声与目标点迹分布如图6(a)所示,检测结果如图6(b)所示。由图6(b) 可知,在增加噪声密度后,本文方法在高噪声密度条件下仍然能够对多目标点迹进行有效检测。

图6 λ=200时检测示意图
4.3 信噪比对检测性能影响
为进一步验证本文方法的有效性,在噪声密度λ=200、不同信噪比条件下进行仿真验证。其他条件与4.2节相同。不同信噪比条件下的检测结果如表2所示。由表2可知,在信噪比为3 dB时,单目标被检测到的平均检测概率达到72%,3个目标被同时检测到的平均检测概率也达到60%以上。因此,本文方法在高噪声密度条件下对低可探测目标仍具有较好的检测性能。

表2 不同信噪比条件单/多目标检测概率
4.4 目标点迹非交叉时检测性能分析
在信噪比为3 dB、噪声密度λ=200,其他参数设置4.1节条件下做进一步仿真验证。采用DP-TBD[29]、HT-TBD[30]和本文方法分别对预处理后的数据进行处理,得到处理后的结果如图7所示。由图7可知,当目标点迹非交叉时,3种方法都能对水下多目标进行有效检测。

图7 目标点迹非交叉检测示意图
4.5 目标点迹交叉时检测性能分析
随着相邻目标间距的减小,DP-TBD、HT-TBD检测性能将下降[29-30]。在目标初始位置分别为(9.15 km,6.15 km)、(9.14 km,6.04 km)、(10.18 km,6.03 km),对应航向为63°、60°、60°,其他参数与4.4节相同的条件下,对上述3种方法性能进行分析。检测点迹如图8所示。
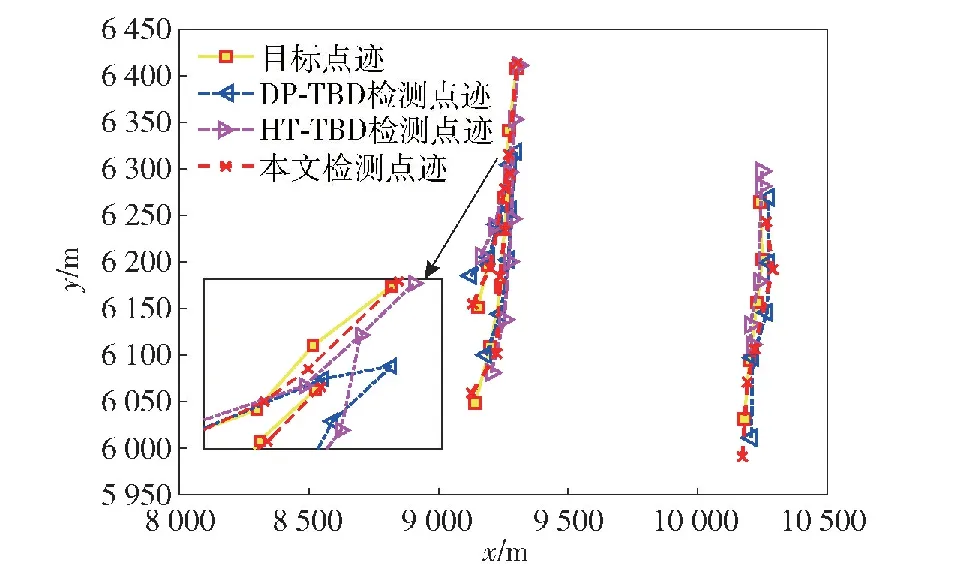
图8 目标点迹交叉检测示意图
由图8可知,当存在目标点迹交叉或过近情况时,在DP-TBD检测点迹和HT-TBD检测点迹中,不同目标的部分点迹出现重合,而本文方法检测点迹未出现重合,且变化趋势与目标点迹保持一致,仍然能够对水下多目标点迹进行有效检测。原因如下:与采用多元假设检验的DP-TBD方法相比,本文方法在检测多目标时能够同时形成对应峰值,不需要考虑多目标联合搜索情况下的多元假设检验问题;与采用单门限的HT-TBD方法相比,本文方法采用随机Hough变换,在参数空间中设置多判决门限,改善了多目标之间相互干扰对门限检测的不利影响;此外,本文方法采用点迹参数而非点迹本身的检测思想,检测性能不受目标位置间隔较大条件的限制。
在上述仿真条件下,改变信噪比对上述3种方法性能做进一步分析。3种方法检测性能比较如表3所示。
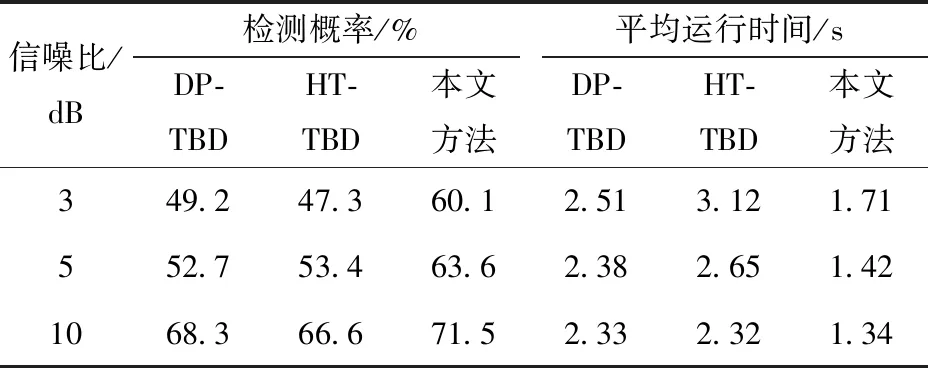
表3 3种方法检测性能比较
由表3可知,随着信噪比增加,3种方法的检测概率而增加,但本文方法检测效果更好。在信噪比为3 dB时,本文方法的检测概率分别比DP-TBD、HT-TBD方法提高10.9%、12.8%。同时,3种方法的平均运行时间都随信噪比增加而减小。由于采用随机Hough变换,本文方法的时效性明显优于DP-TBD、HT-TBD方法。
5 结论
1)本文提出一种自适应关联交叉定位和双门限随机HT-TBD的水下多目标被动检测方法,在低信噪比、多目标、高噪声密度条件下,具有较好的检测概率。在信噪比不低于3 dB条件下,3个目标被同时检测到的平均检测概率可以达到60%以上。
2)在目标点迹交叉不利条件下,本文方法采用双门限随机Hough变换,在参数空间中采用多判决门限,改善了参数的分辨率,与DP-TBD、HT-TBD方法相比,仍具有较好检测性和时效性。
