曲线焊缝的机器人焊接轨迹规划与高频控制
2023-08-08吴超群
吴超群 赵 松 雷 艇
武汉理工大学机电工程学院,武汉,430070
0 引言
机器人技术和传感器技术的发展使得无需示教的焊缝跟踪成为可能,而机器人轨迹的规划和控制是其中的重要一环[1]。B样条曲线因在复杂轨迹规划方面的独特优势而被广泛用于CAD/CAM和CNC领域,以及近年来的机器人轨迹规划[2]。刘杰等[3]针对相贯焊缝焊接示教工作过于复杂的问题,先利用前一道焊缝的空间轨迹拟合出理论平面,再将前一道焊缝沿法线方向等距平移,最后基于B样条曲线在理论平面生成下一道焊缝。毛征宇等[4]采用近似的弓高误差来降低插补过程中弓高误差的计算难度,并结合速度和加速度的约束,设计了能自动调整三次均匀B样条插补步长的算法,使加工过程更加平稳可靠。上述规划方法虽满足精度需求,但没有考虑算法的实时性,难以满足实时跟踪焊缝的需求,因此本文研究了机器人的轨迹快速规划方法。
焊缝跟踪需要实现对机器人的实时控制。LEI等[5]采用PLC向驱动器发送脉冲信号实现了电机控制。外部引导运动(externally guided motion, EGM)模块是ABB机器人的一个底层运动控制模块,利用其低延迟的特性可实时引导轨迹。启用EGM模块时,机器人与上位机建立UDP/UC连接,以4 ms为周期双向传输数据,机器人可在收到数据的10~20 ms后开始运动。BALLESTER[6]研究了一种基于EGM的反馈式运动规划和控制器框架,使机器人能更加灵活地操纵物体,且控制器能同步规划双臂轨迹进行避障,并以250 Hz的频率重新规划以进行局部调整。毛翊超等[7]将EGM用于视觉伺服控制,辅助普通相机完成高频高精度的机器人动态控制。本文基于三次非均匀B样条曲线提出一种分段插补的轨迹规划方法,利用EGM设计了机器人高频控制器来实时引导机器人运动,通过焊接试验验证该方法的可行性。
1 机器人轨迹规划方法
本文提出的轨迹规划与高频控制方法如图1所示,焊缝上的型值点坐标已知,按照插补时长最优原则确定每段焊缝的型值点数量,从而确定每段轨迹的长度并将整条焊缝轨迹分成n段。然后利用三次非均匀B样条曲线依次插补每段轨迹、得到插补点,并将插补点存入一个先入先出队列。完成第一段轨迹的插补后,从队列头部取出插补点坐标,通过EGM发送至机器人,引导机器人运动并开始焊接,同时进行第二段轨迹的插补计算并将新的插补点坐标插入队列尾部,直至完成整条轨迹的插补。
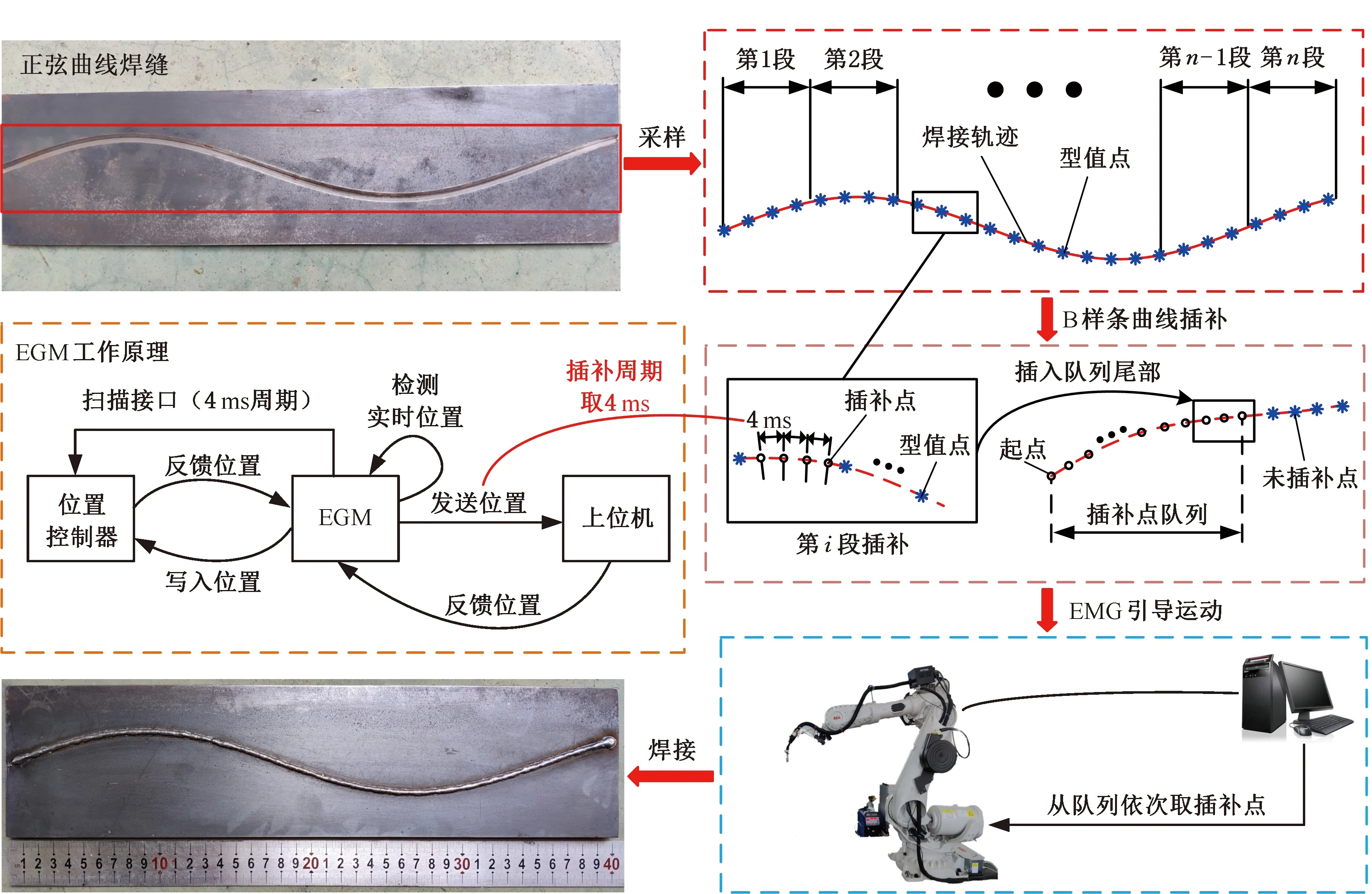
图1 焊接轨迹规划与高频控制
1.1 非均匀B样条曲线的插补算法
贝塞尔曲线理论提出后,B样条曲线以其强大的曲线拟合能力和优秀的几何特性而被广泛用于数控机床和机器人轨迹的拟合与离散[8]。一般的样条插补流程有两种:利用型值点反求控制点;直接将型值点作为控制点[9]。得到控制点便可定义一条B样条曲线,然后在曲线上插补型值点。本文采用第一种方法,如图2所示,型值点为焊缝型值点Pi(i=1,2,…),相邻两数据点X方向的距离为点距s。
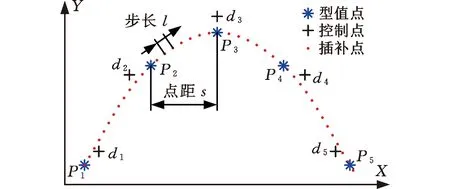
图2 B样条曲线插补
给定次数k便定义了一条关于参数u的k次B样条曲线函数:
(1)
U=(u0,u1,…,un+k+1)
式中,u为函数的自变量;ui为型值点Pi参数化得到的节点,ui∈[0,1],i=1,2,…,n+k+1;U为节点矢量;dj为控制点坐标(xj,yj)。
第j个k次B样条基函数为
(2)
文中规定0/0=0。
离散焊缝曲线时,采用等参数Δu离散曲线的步长随曲线曲率的变化而变化。焊接过程中,焊枪一般匀速运动,每个插补周期很短且步长为定值,故采用等长微小线段近似弧长,以微小线段离散曲线[10]。通过定义法求B样条曲线的一阶导数,进而求取每个周期内参数u的增量Δu,再由Δu反求样条的坐标点,保证每个插补点都在样条上,避免累积误差。由德布尔给出的导数公式可得曲线p(u)对于u的导数:
(3)
样条曲线的起点为点P,以插补步长近似弧长等长度地离散曲线,即从点P开始依次在曲线上取出等长的小段,每段长度都等于插补步长[11]。第i个插补步长对应参数u的增量为
(4)
式中,l为插补步长。
第i个插补点对应的参数值为
uP,i=ΔuP,1+ΔuP,2+…+ΔuP,i
(5)
1.2 轨迹规划的分段方法
图3所示的曲线焊缝可通过示教或外部传感器获取焊缝的特征点坐标,并将其作为拟合轨迹的型值点。长焊缝的型值点和插补点较多,同时拟合所有型值点会增大上位机的负担,导致计算过慢甚至超出上位机的计算能力,无法得到准确轨迹。
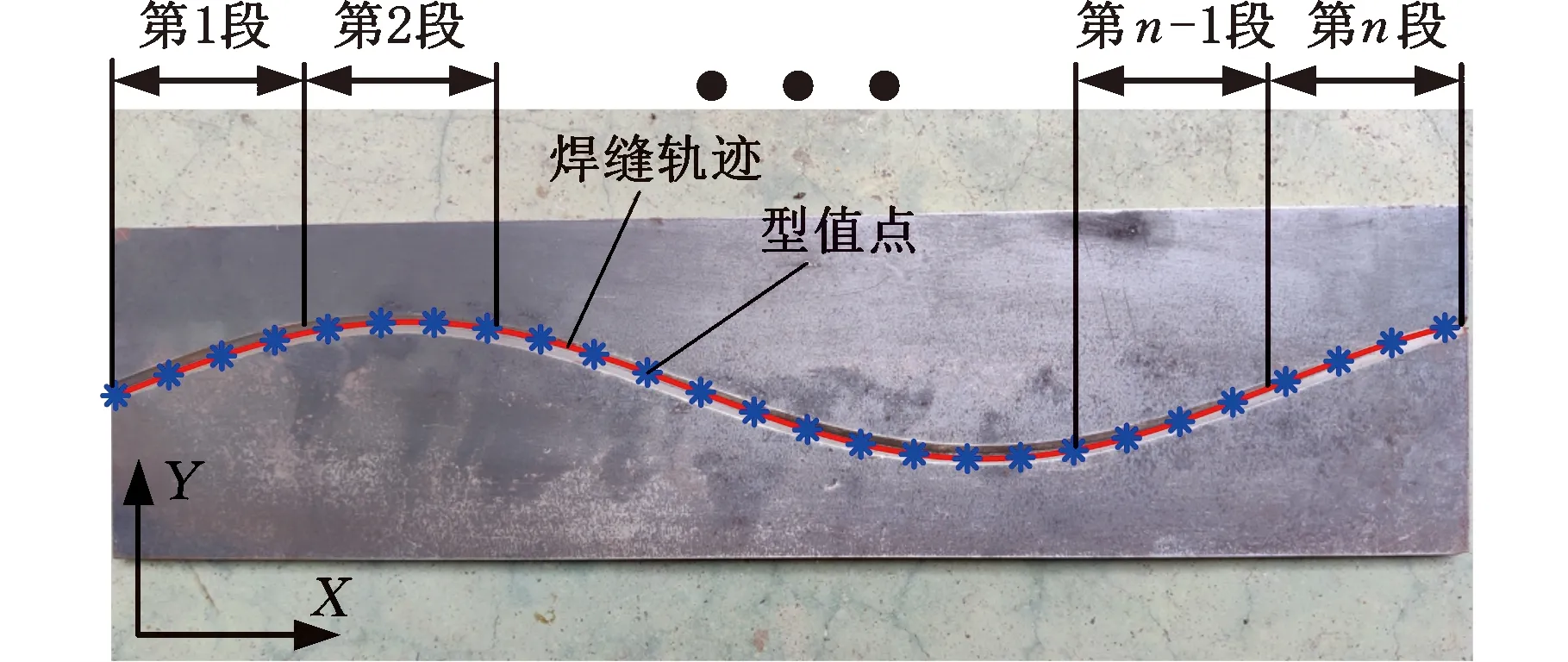
图3 曲线焊缝轨迹
为解决这一问题,本文采用分段插补方法,按照一定段长将焊缝从起点到终点分成若干段(每段包含一定数量的型值点)。依次对各段焊缝进行插补,并将插补点存入一个先入先出队列,如图4所示,EGM模块从队列头部开始读取并调用插补点来引导机器人末端运动,B样条插补与EGM模块实时引导位于2个线程并可同步进行。所以本文方法不必等所有点的插补完成后再进行运动控制,第一段插补完成后即可开始控制机器人运动。
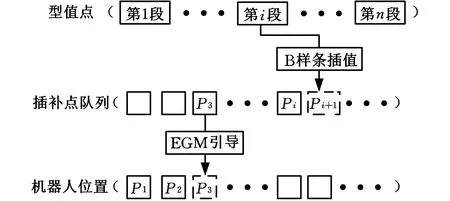
图4 插补点先入先出队列
第一段轨迹的插补用时是评价该方法优劣性的重要指标。插补分为曲线拟合和插补两个步骤,插补时长为曲线拟合用时和插值用时之和。对一条X方向长度为400 mm的正弦曲线焊缝,每隔0.1 mm取一个型值点,不同分段长度下,第一段轨迹的型值点个数、插补点个数、拟合用时tf、插值用时ti和插补总用时t如表1所示。
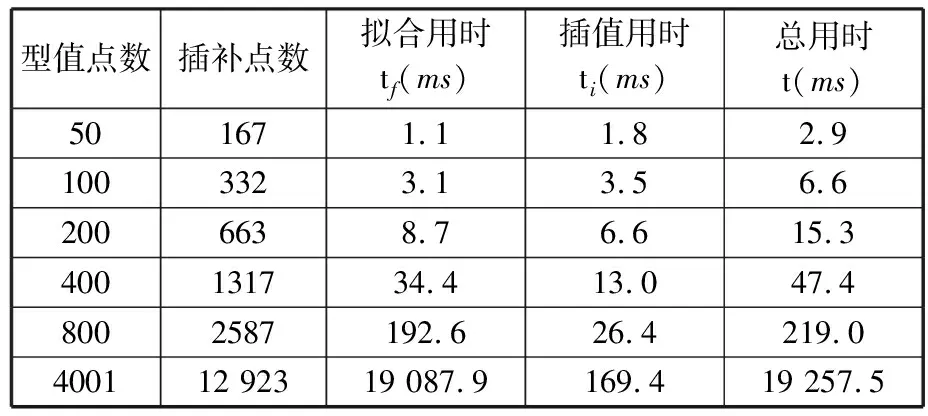
表1 第一段轨迹的点数和插补用时
随着型值点的增多,拟合用时呈几何级数增长,并在总用时中占据主导地位,而插值用时基本呈线性增长,这是因为型值点拟合需要求解逆矩阵,而插值求解仅涉及线性运算。EGM模块的控制延迟受硬件条件限制,最短为48 ms,因此通过减少插补用时来提高轨迹规划的实时性。每段轨迹的型值点过少会导致分段过多,影响插补精度。结合插补用时和硬件条件确定每段轨迹的长度,插补总用时应小于EMG模块控制延迟,每段轨迹不宜过短,每段轨迹包含200个型值点,每段轨迹的插补总用时为15.3 ms。
2 机器人高频控制器设计
2.1 EGM模块的控制方法
EGM模块可以高速读取机器人的运动信息,并向机器人写入控制信息。机器人每隔4 ms读取EGM的控制点坐标,相邻两个控制点的距离决定了机器人的运动速度[5]。
机器人末端以焊接速度v由点Pk(xk,yk,zk)向点Pk+1(xk+1,yk+1,zk+1)移动,应有插值点数量为

(6)
Pk与Pk+1间第j个插值点的坐标Pkj(xkj,ykj,zkj)为
(7)
2.2 EGM点动模式的运动特性
为验证EGM模块的控制性能,基于EGM模块的位置引导,设计机器人的点到点运动,测试EGM控制的速度特性、加速度特性和响应时间特性。
通过EGM给机器人发送一个目标点坐标,为便于分析,该目标点距离焊枪100 mm。向目标点移动的过程中,不断读取并记录焊枪的反馈位置,得到焊枪的位移-时间曲线(图5)。向机器人发送目标点坐标后,机器人经过控制延迟t1后开始运动,在经历一个先加速再减速的过程后到达目标点,加速、减速的时长分别为t2和t3。
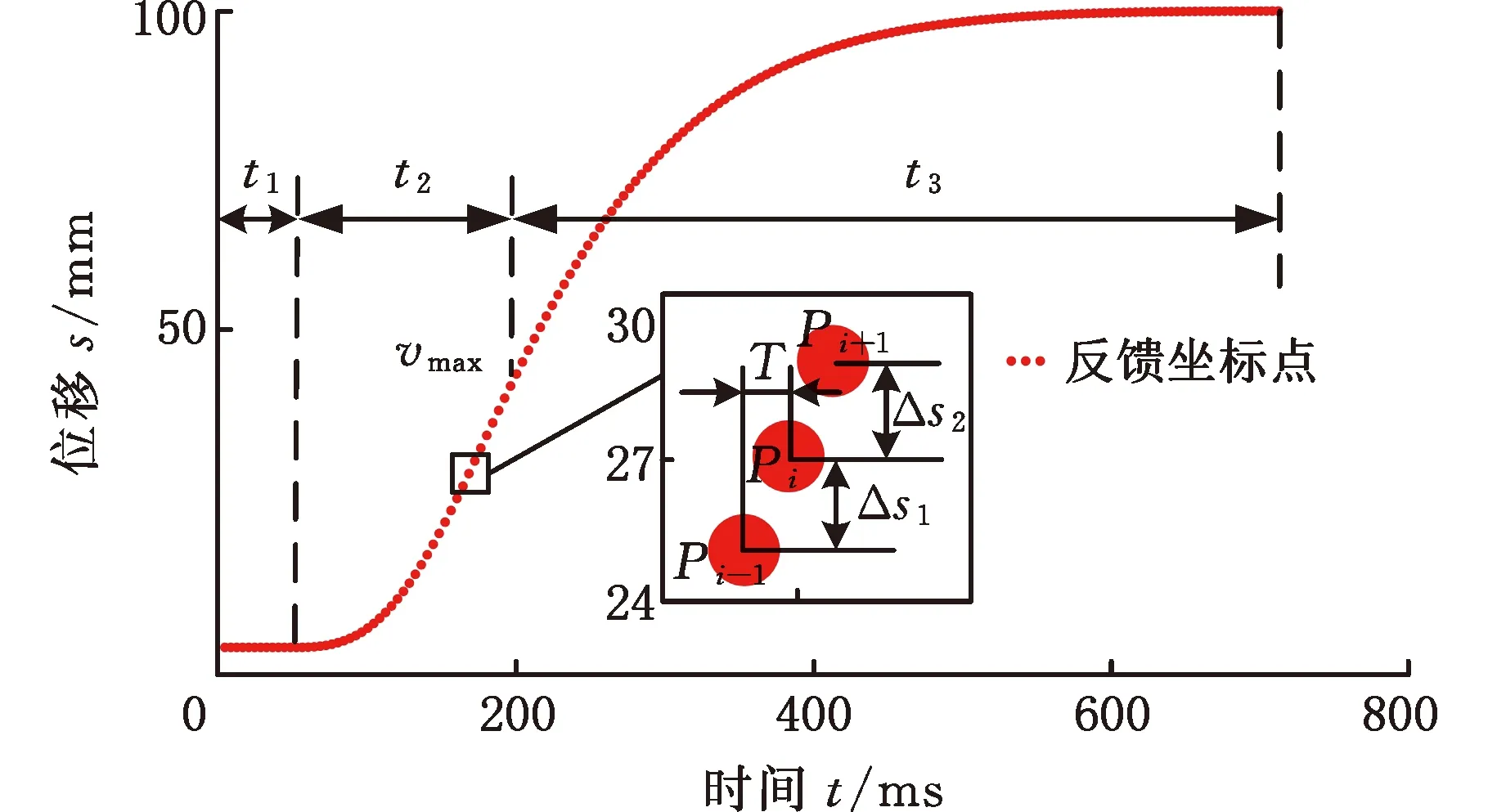
图5 点-点运动的位移-时间曲线
运动过程中,相邻两点间的距离为Δs,则点Pi的速度近似为
(8)
式中,Δs1为Pi与邻点Pi-1的距离;Δs2为Pi与邻点Pi+1的距离。
加速度为
(9)
速度及加速度与位移的关系如图6所示。焊枪向目标点运动时先加速后减速,最终以相对较小的速度到达目标点,其中,最大加速度、最大减速度及最大速度分别出现在点P1、P2和P3处。
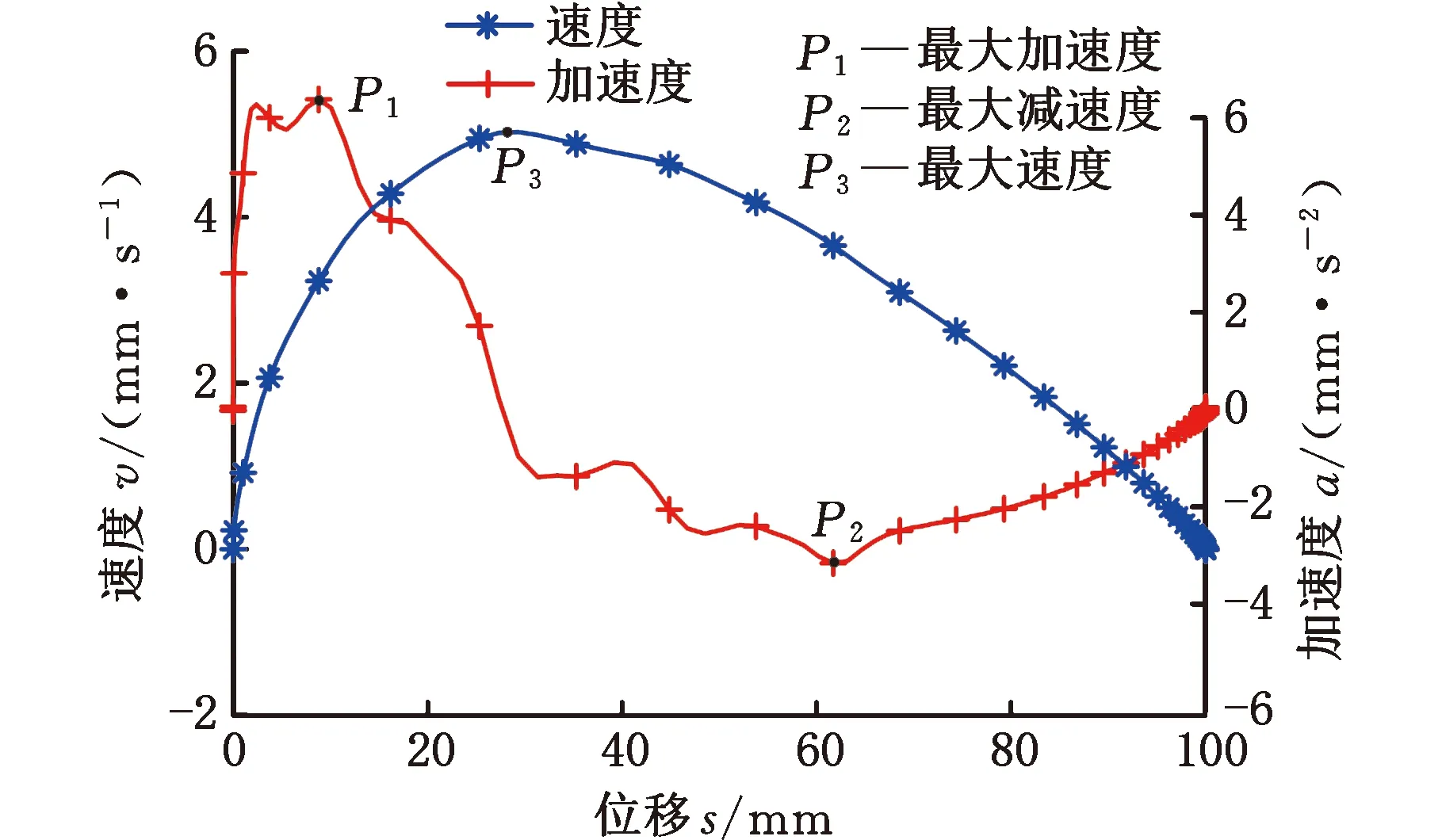
图6 点-点运动的速度-位移曲线和加速度-位移曲线
为验证点动模式运动特性随点动距离的变化关系,求取目标点与焊枪当前位置的不同距离下的焊枪最大加速度、最大速度、最大减速度,如表2所示。随着距离的增加,焊枪的最大运动速度、最大加速度和最大减速度均呈增大趋势;距离超过60 mm后,点动运动最大加速度超出机器人允许的最大加速度,EMG报错,故一个采样周期内的最大步长不应超出60 mm。

表2 点-点运动的最大速度、加速度及减速度
2.3 机器人折线轨迹运动特性
为验证EGM能否稳定地控制机器人焊接曲线焊缝,对点动运动转弯时的性能进行测试(选取较大的运动速度以使测试结果更加明显)。控制焊枪以固定速度100 mm/s运动,焊枪的目标轨迹与实际轨迹如图7所示。

图7 焊枪的运动轨迹
图7中,理论转角为点R,而焊枪实际轨迹在点R1处便开始偏转,并在点R2处重新与理论轨迹重合。从点R1运动至点R用时为tR1,距离为sR1;从点R运动至点R2用时为tR2,距离为sR2。由于控制延迟的存在,向机器人发送R点坐标时,焊枪的实际位置在点R1处。继续向机器人发送点坐标,此时所发送的坐标点X坐标不变,Y坐标线性增加。图5中,t3阶段的焊枪在X方向做减速运动,t1阶段的焊枪在Y方向做加速运动。
3 轨迹规划与控制试验与分析
试验平台主要由ABB IRB-6700机器人(安装有EGM模块,重复定位精度为0.1 mm)、上位机、奥太MIG-500RP焊机组成。
实时焊缝跟踪系统利用外部传感器对焊缝采样得到型值点[13],本文模拟传感器的采样特点对焊缝曲线y=20sin(0.018x)采样,每隔0.1 mm取一个点,得到轨迹规划的型值点Pn(xn,yn)。焊接速度为8 mm/s,以步长0.032 mm插补,通过EGM模块控制机器人沿插补点运动并读取机器人末端焊枪的实际位置。
非均匀B样条分段插补结果如图8所示,因为型值点比较密集难以在图中全部显示,为便于观察,每隔80个型值点显示一个型值点,因此插补点光滑地通过型值点。如图9所示,焊枪运行平稳,实际焊缝质量满足焊接需求。
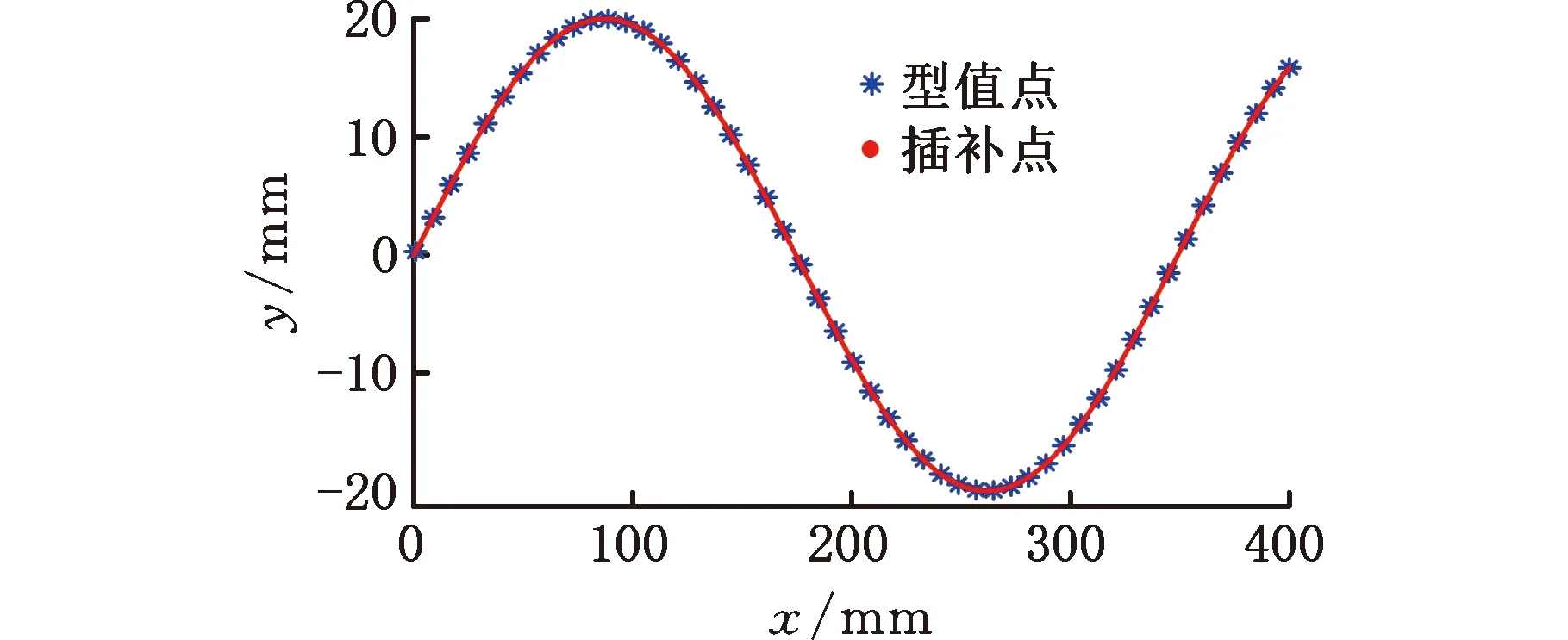
图8 分段插补结果

图9 实际焊接
插补点都在B样条曲线上,因此插补结果对于样条曲线不存在位置误差。将插补点的x坐标代入源曲线y=20sin(0.018x),插补误差为y的理论值与插补出的实际值之差。图10所示为分段插补的位置误差,最大误差在每段样条曲线末尾,与总的分段数量相对应,最大误差在±1.5×10-5mm以内。

图10 理论的位置误差
利用分段插补方法引导机器人运动,得到实际运动的位置误差如图11所示。对比图10插补计算的理论误差,可见插补误差远小于实际运动的位置误差,因为实际运动的误差不止由插补误差决定,还与机器人的重复定位精度有关。采用2.2节的方法对实际运动速度进行分析,得到实际运动的速度误差,如图12所示。

图11 实际的位置误差
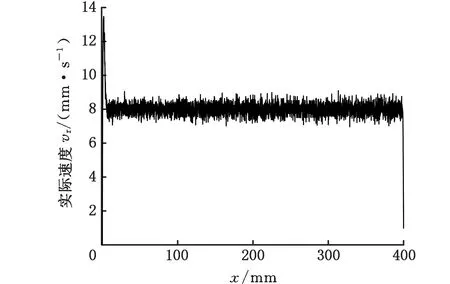
图12 实际的速度误差
由图11可见最大位置误差不超过0.200 mm,计算得平均位置误差为0.024 mm。由图12可见,实际运动速度在理论速度8 mm/s附近存在波动,计算得速度的平均误差为4.36%,满足焊接要求。
4 结论
(1)本文提出了一种分段式的焊接机器人实时轨迹规划方法,基于非均匀B样条曲线对焊缝进行插补,在第一段轨迹插补完成后便控制机器人运动。该方法具有更高的实时性,将插补和控制总时长缩短至100 ms以内。
(2)采用EGM模块引导机器人运动,通过点-点运动和折线运动测试了EGM的实际性能。EGM的控制周期最小可达4 ms,控制响应时间为48 ms。
(3)分段式轨迹规划的焊接试验表明,机器人运动轨迹平滑,位置误差在±0.2 mm以内;在提高焊接轨迹规划实时性的同时,保证了焊接质量。
