基于超弹性模型的玻璃态聚合物应变强化行为研究1)
2023-08-06田传帅
田传帅 詹 林 肖 锐 ,2)
* (河海大学工程力学系,南京 210098)
† (浙江大学工程力学系,杭州 310027)
引言
玻璃态聚合物在变形过程中会表现出复杂的力学行为[1-4],其应力-应变曲线可分为4 个阶段: 弹性、应变软化、平台和应变强化.当前已有不少学者开展了系统的实验和理论研究玻璃态聚合物的力学行为[5-11].例如Boyce 等[12]利用屈服强度随时间的演变来描述应变软化行为.关于应变强化行为的模拟,目前普遍采用超弹性模型,主要有两个经典的超弹性模型应用的最为广泛.一个是Neo-Hookean模型,例如Senden 等[13]采用其模拟取向后的聚碳酸酯(PC) 在单轴拉伸和压缩中的应变强化响应;Van Melick 等[14]用其拟合来获得聚苯乙烯(PS)和聚苯醚(PPO)共混物在单轴压缩中的强化模量.另一个广泛使用的模型是Arruda 等[15]提出的超弹性八链模型.该模型被用以模拟PC 和聚甲基丙烯酸甲酯(PMMA)在单轴压缩和平面应变压缩中的强化行为;Dupaix 等[16]对其改进后,用其模拟玻璃态聚合物在整个玻璃化转变区间的应变强化行为.
超弹性理论建模一直是固体力学的研究重点,在过去的几十年间,有大量的超弹性模型被建立,例如Shariff 模型、Haines-Wilson 模型、Mooney-Rivlin 模型、Ogden 模型、三链模型、全链模型和p-root 模型等.相关学者也全面评估了这些超弹性模型的有效性[17-18].例如,Marckmann 等[19]在比较了20 个超弹性模型后,发现扩展管道模型、Shariff模型和p-root 模型能够较好地再现实验结果.Steinmann 等[20]详细比较了14 个常见超弹性模型后发现,这些模型在模拟橡胶材料多轴变形条件下的力学响应时均表现不佳.Hossain 等[21]比较了八链和全链模型及其6 个改进版本,表明双参数改进后的八链模型优于传统的八链模型,而在全网络模型情况下,Elías Zuniga 等[22]的模型比Wu 等[23]的Giessen 模型更优.
虽然这些超弹性模型在描述橡胶超弹性方面的表现得到了全面的评估[24-27],但是这些模型能否更好地用来模拟玻璃态聚合物的应变强化行为还需进一步验证.本文中,将三链模型、八链模型、全链模型和p-root 模型这几种超弹性模型引入到黏塑性模型中,分别用这些模型来描述玻璃态聚合物的强化行为,并对文献中玻璃态聚合物PC 和PMMA 的单轴压缩和平面应变压缩条件下力学响应进行了模拟,全面评估这些模型的表现,为后续玻璃态聚合物的理论建模提供参考.
1 黏塑性本构模型
这里介绍玻璃态聚合物有限变形黏塑性本构模型.图1 是本文所采用黏塑性模型的示意图,主要由3 个部分组成: 一个线性弹簧,用于表征弹性响应;一个黏壶,用来表示与应变率相关的黏塑性变形行为;以及一个与黏壶并联的非线性橡胶弹性弹簧,用来描述大变形下的强化响应.

图1 黏塑性模型流变学示意图Fig.1 Rheological representation of the viscoplastic model
首先变形梯度F可以分解成弹性部分Fe和黏塑性部分Fv
变形率张量D定义为
黏塑性变形率Dv可表示为
其演化方程可采用下面的流动法则来表示[15]
玻璃态聚合物的应变软化可以通过演化的屈服强度来表征,本文将采用如下的屈服强度演化方程[15]
其中,h是屈服应力相对于塑性应变的下降速率,sss是稳态时的屈服强度,初始屈服强度为s0=0.077μ/(1-ν)[28],其中 μ 是剪切模量,ν是泊松比.
黏塑性驱动应力T定义如下
其中 σ是Cauchy 应力,J=detF=detFe是变形体积比,B是背应力.Cauchy 应力表达式为[29]
其中,μ是剪切模量,v是泊松比,lnUe是Hencky 应变.
如图1 所示,背应力B由右侧非线性弹簧决定,本文中将采用三链模型、八链模型、全链模型和proot 模型来分别构建背应力模型,并对其进行对比研究.上述4 种模型,主要是从微观力学角度出发,利用统计力学原理建立长链分子的自由能,再提出合适的分子链网络构型,将材料的宏观力学行为与内在的物理机理联系起来.在三链模型[30]中,主要假设在单位体积的立方体内包含了n条分子链,且在变形的过程中,3 个独立的分子链组分别平行于3 个拉伸主方向,相当于每个主方向上有n/3 条分子链,最后根据单链分子的自由能得到整体的自由能函数.Arruda-Boyce 八链模型[31]则认为8 个分子链正好连接着单位立方体的中心和8 个顶点,使得几何形状关于3 个主轴对称,因此在变形的过程中8 个分子链始终具有相同的伸长率.Wu 等[23]提出的全链模型假设所有的分子链在单位球体内,且链的一端在球体中心,另一端在球体表面,最后通过对这些单链自由能进行积分得到总体的自由能函数.Miehe 等[32]建立的p-root 模型认为高分子的微结构可以由微球体表示,并通过最小平均自由能原理确定了微球体上的拉伸比,接着以非仿射形式将微观运动学变量与宏观连续体的拉伸相关联.
下面将给出这4 种超弹性模型的相关方程.在3 个主应变方向上,右柯西格林张量可以写成下面的形式
其中F是变形梯度,λ1,λ2和 λ3分别是3 个主方向上的拉伸比.对于超弹性响应,当给定了自由能函数Ψ,可以通过下面的关系来计算应力
其中 σi是第i主方向上的柯西应力.
在统计模型中,高分子单链的自由能可由朗之万统计给出
在Wang 等[30]的三链模型中,由于3 个分子链分别平行于3 个主方向,且是相互独立的,其自由能函数可以表示为3 个方向上自由能之和,如下所示
Wu 等[23]的全链模型主要认为在空间中随机取向的分子链可以用单位球体来表示,然后对这些单链进行积分,可以得到总的自由能函数,表示如下
Miehe 等[32]建立的非仿射p-root 模型假设等效拉伸 λ是拉伸比在仿射条件下计算的p次平均根,其数值离散形式表示如下
而自由能函数可以写成如下形式
2 结果与讨论
这里首先评估4 种超弹性模型的应力响应.如图2 所示,对于每一种模型,选取相同的参数(G=0.1,N=10),分别给出在单轴压缩和平面应变压缩条件下的应力响应.图2(a)是4 种模型在单轴压缩条件下的应力-伸长比曲线(p-root 模型中p=1),可以看到,4 种模型在大变形时差别较大.其中三链模型的强化效应最大,全链模型次之,八链模型最小.同时,考虑到p-root 模型比其他3 种模型多了一个控制参数,图2(b)则绘制不同p值下单轴压缩的应力响应.如图所示,随着p值的增加,大变形时的强化效应逐渐增大.图2(c)是平面应变压缩条件下的应力响应,图2(d)是平面应变压缩下不同p值时的p-root 模型的模拟结果,其趋势与单轴压缩时相同.这表明,与其他3 种模型相比,p-root 模型在模拟橡胶的超弹性响应时具有一定的灵活性.

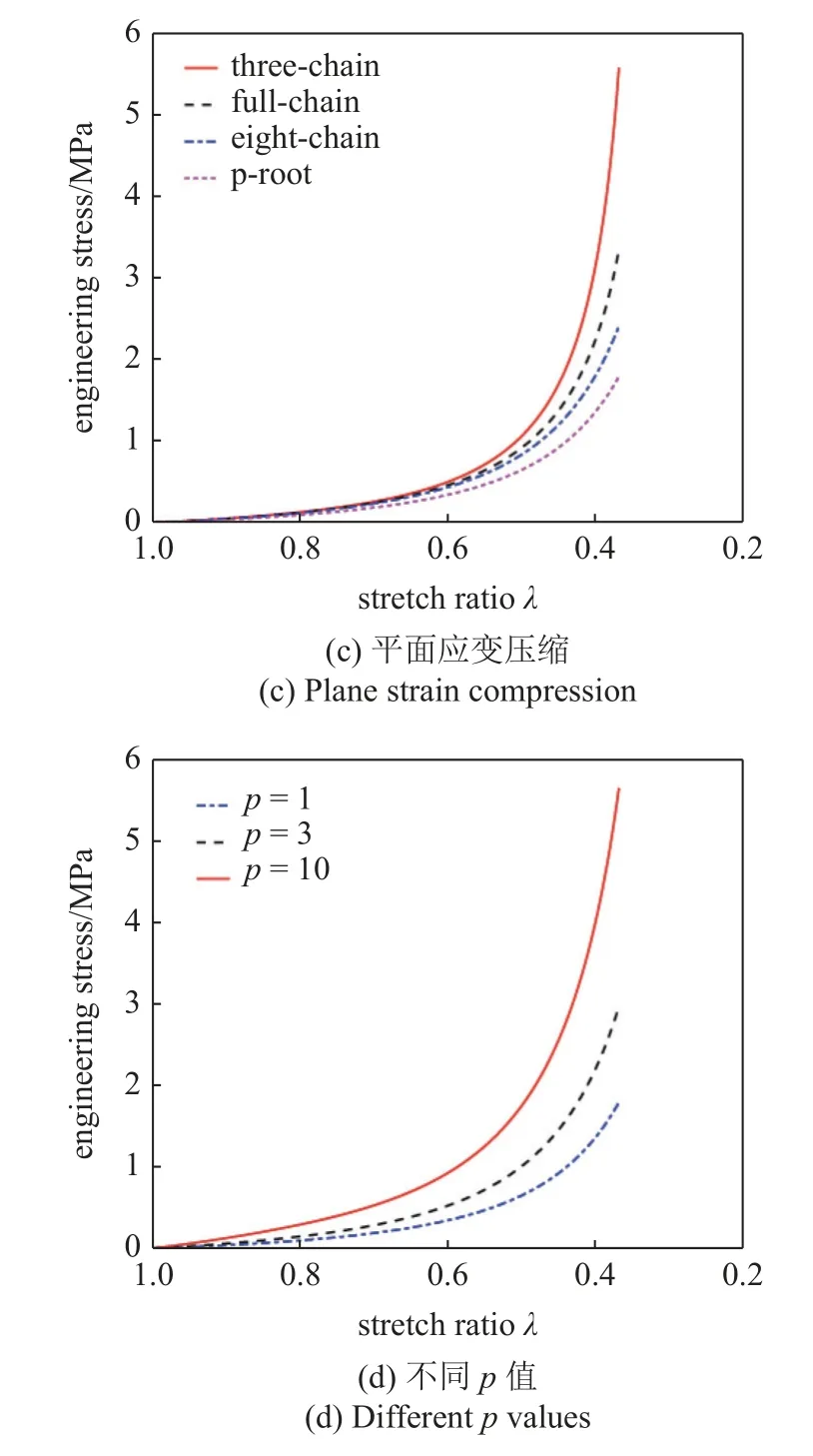
图2 各个模型超弹性响应Fig.2 Hyperelastic responses of different models
进一步利用这几种模型模拟了文献中玻璃态聚合物的应力响应[15],即聚碳酸酯PC 材料的单轴压缩和平面应变压缩结果.除了强化部分,黏塑性模型参数采用文献[15]的数据,发现基于上述参数能够很好的模拟屈服阶段和应变软化阶段,而强化部分的模型参数,通过寻找误差最小值来标定
这里采用了两种方法来评估模型的性能.第1 种方法是通过同时对单轴压缩和平面应变压缩的实验数据进行拟合,从而得到模型的参数和相应的模拟误差.第2 种方法则是单独对单轴压缩的数据进行拟合,进而得到相应的模型参数,并进一步对平面应变压缩变形进行模拟,得到相应的误差.所获得的模型参数见表1~表3.

表1 模拟PC 时不同背应力模型的参数和模拟误差(方法1)Table 1 Parameters and simulation error for different models of PC (method 1)

表2 模拟PC 时不同背应力模型的参数和模拟误差(方法2)Table 2 Parameters and simulation error of different modes of PC (method 2)

表3 模拟PC 和PMMA 时黏塑性模型参数Table 3 Parameters of the viscoplstic model for PC and PMMA
采用第1 种方法的模拟结果如图3 所示.可见,三链模型和全链模型均不能较好的描述PC 在大变形条件下的应力响应.相比之下,八链模型和proot 模型能够预测PC 在整个变形区间的应力应变曲线,包括单轴压缩和平面应变压缩的结果.值得注意的是,虽然八链模型的整体趋势模拟较好,但在大变形时,其拟合的单轴压缩结果偏小,这也可以从表1 的模拟误差中得到证实.总的来说,在这几种模型中,p-root 模型在拟合效果上表现最好.


图3 关于PC 的实验和模拟结果对比(方法1)Fig.3 Comparison between the experimentally measured and simulated results of PC (method 1)
第2 种拟合方法的模拟结果如图4 所示.当通过单轴压缩的实验数据确定模型参数后,再对平面应变压缩结果进行预测时,三链模型和全链模型的预测值明显偏大很多,尤其是在大变形区时,预测值几乎是实验值的2 倍;八链模型的预测结果则相对较好,基本吻合实验所得到的平面应变压缩的应力响应,但结果仍偏大;而p-root 模型的预测效果是最好的,与实验结果保持一致.通过这两种方法的模拟结果可知,无论是哪种方法拟合得到的模型参数,proot 模型均表现出最优异的模拟性能,八链模型稍逊一些,而三链模型和全链模型的模拟效果是最差的.


图4 关于PC 的实验和模拟结果对比(方法2)Fig.4 Comparison between the experimentally measured and simulated results of PC (method 2)
此外,对PMMA 材料也采用了同样的方法来评估模型的性能,黏塑性模型参数如表3 所示,两种方法的背应力模型参数及模拟误差见表4 和表5.第1 种方法是单轴和平面变形同时拟合,结果如图5所示.可以看到,在大变形时,八链模型和p-root 模型的结果要优于三链模型和全链模型的结果.第2 种方法是单轴标定参数然后预测平面应变,结果如图6 所示.三链模型和全链模型在预测平面应变压缩结果时,明显比实验值偏大一些;而八链模型和p-root 模型的预测结果相对较好,与实验结果基本吻合.由此可见,本文所获得的结论对于不同玻璃态聚合物的应变强化行为均适用.

表4 模拟PMMA 时不同背应力模型的参数和模拟误差(方法1)Table 4 Parameters and simulation error for different models of PMMA (method 1)

表5 模拟PMMA 时不同背应力模型的参数和模拟误差(方法2)Table 5 Parameters and simulation error of different modes of PMMA (method 2)

图5 关于PMMA 的实验和模拟结果对比(方法1)Fig.5 Comparison between the experimentally measured and simulated results of PMMA (method 1)

图6 关于PMMA 的实验和模拟结果对比(方法2)Fig.6 Comparison between the experimentally measured and simulated results of PMMA (method 2)
最后,为了考虑加载速率对玻璃态聚合物黏塑性行为的影响,还对PETG 在单轴压缩实验中不同应变率的结果进行了模拟,首先通过对0.01/s 应变率的实验结果进行拟合,得到相应的参数(表3 和表6),然后再模拟0.1/s 和1/s 应变率下的实验结果.模拟结果如图7 所示.可以看见这4 种模型均能模拟不同应变率下的应力响应结果,具有一定的预测能力,其中三链模型和全链模型在模拟大变形时仍稍稍偏大,而八链模型和p-root 模型整体的模拟效果较好.


图7 不同应变率下PETG 的实验和模拟结果对比Fig.7 Comparison between the experimentally measured and simulated results of PETG at different strain rate
3 结论
本文建立有限变形黏塑性本构来表征玻璃态聚合物的力学行为,并基于三链模型、八链模型、全链模型和p-root 模型等4 种超弹性模型来构建背应力模型,以描述应变强化行为,并分析对比了其整体表现.选用两种确定模型参数的方法,利用这几种模型模拟了文献中关于玻璃态聚合物PC 的实验结果,结果表明无论选用何种参数确定方法,八链模型和p-root 模型均可较好的描述PC 在整个实验过程中的应力响应,且这两个模型的误差均显著小于三链模型和全链模型.此外,p-root 模型的模拟效果比八链模型稍好一些.本文所采用的4 种背应力模型,单个分子链均采用朗之万自由能,其区别在于假设了不同的分子链网络构型.正是由于这些不同的分子网络构型假设,导致相同变形下4 种模型的宏观自由能和应力响应的不同.在描述超弹性行为时,八链模型的双轴预测额能力相对于三链和全链模型有所提高,而 p-root 模型的双轴表现能力相较于经典超弹性模型又有了大幅提高.可见,八链模型和proot 模型可更加准确地表征真实高分子网络构型的主要特征,因此他们在模拟玻璃态聚合物强化方面也同样具有优越性.本文相关结果为玻璃态聚合物本构建模提供重要的参考意义.