仿生分拨草防堵装置的设计与试验
2023-08-04朱惠斌白丽珍赵浩然马世骜
朱惠斌,张 旭,洪 洋,白丽珍,赵浩然,马世骜
(昆明理工大学现代农业工程学院,云南 昆明 650500)
保护性耕作可以降低土壤的风蚀水蚀、改善土壤结构、蓄水保墒、增加土壤肥力,是一种节本增效的农业生产方式[1-4]。西南地区是中国三大玉米产区之一,前茬作物小麦秸秆粉碎覆盖还田量大,保护性耕作模式下在秸秆覆盖地进行少、免耕播种作业时,易发生残茬缠绕,造成机器堵塞,降低播种作业质量及工作效率。因此,提高清秸防堵技术水平是保护性耕作少免耕播种机作业的关键[5-6]。
目前清秸防堵装置按动力来源可分为主动式和被动式[7-8]:主动式清秸防堵装置主要通过施加动力将秸秆高速切断粉碎或者抛送到种沟两侧及后方,从而避免发生缠绕堵塞,其综合防堵性能好,但结构复杂,功耗较大,因此主动式清秸防堵机具无法适应我国西南地区地块较小且坡耕地较多的作业环境[9];被动式清秸防堵装置主要使用圆盘式、星型除草轮式清秸部件等,依靠机具牵引力与地表秸秆摩擦力的共同作用完成拨抛防堵,其具有结构简单、土壤扰动量小、功耗低等优点[10-11],此类装置对坡耕地免耕播种机具有较好的适用性。近年来国内外学者对被动式清秸防堵装置进行了一系列研究,赵淑红等[12]设计了一种多功能集成式播种开沟器,采用典型的双圆盘开沟装置,此类防堵装置在秸秆半量还田条件下作业质量较好,当秸秆覆盖量过大时,因其对秸秆的抛送速度不足,清秸率降低,且圆盘的入土角为钝角,要求机具具有较大重量;范旭辉等[13]设计了一种仿形爪式防堵清茬机构,运用拨禾行星轮原理,在双圆盘开沟器基础上设计了星型轮爪式拨草轮,可同时完成秸秆残茬的拨动以及侧向分离;刘正平等[14]设计了一种从动型旋转齿盘分草装置,对星型轮爪式清秸部件进行了优化,配合设计分草栅条工作,进一步提高了拨草及分草性能。但由于机具结构的限制,上述清秸防堵装置仍存在作业稳定性差、拨离速度不足、漏清、秸秆回流等问题,清秸防堵能力有限。
本文基于仿生学原理,结合免耕播种机清秸防堵装置的工作原理与白星花金龟(Potosiabrevitarsis)前、后肢在秸秆层中的拨草、分草机理,在结构形态仿生的基础上进行运动形态仿生[15-16],设计一种仿生爪式拨草轮、分草挡板、分草栅条相结合的分拨草防堵装置,通过理论分析确定仿生分拨草防堵装置的主要结构参数,通过离散元仿真试验获得最佳作业参数组合,并进行田间试验验证,以期为高性能免耕播种机清秸防堵装置的研究和发展提供参考。
1 仿生分拨草防堵装置的设计
1.1 整机结构与作业原理
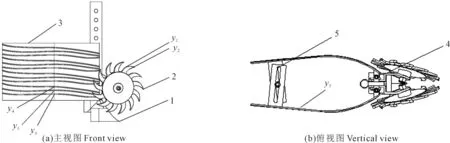
仿生分拨草防堵装置通过U型螺栓安装于免耕播种机机架上,随播种机的前进进行分拨草开沟防堵作业(图1)。机器前进过程中,仿生拨草轮轮爪插入秸秆层中,在拖拉机牵引力与地表秸秆层摩擦阻力形成的力偶作用下向后转动,将秸秆拨起并向侧后方抛出。随后仿生分草挡板将秸秆进一步向两侧分流,同时由仿生分草栅条增大秸秆的流动性。
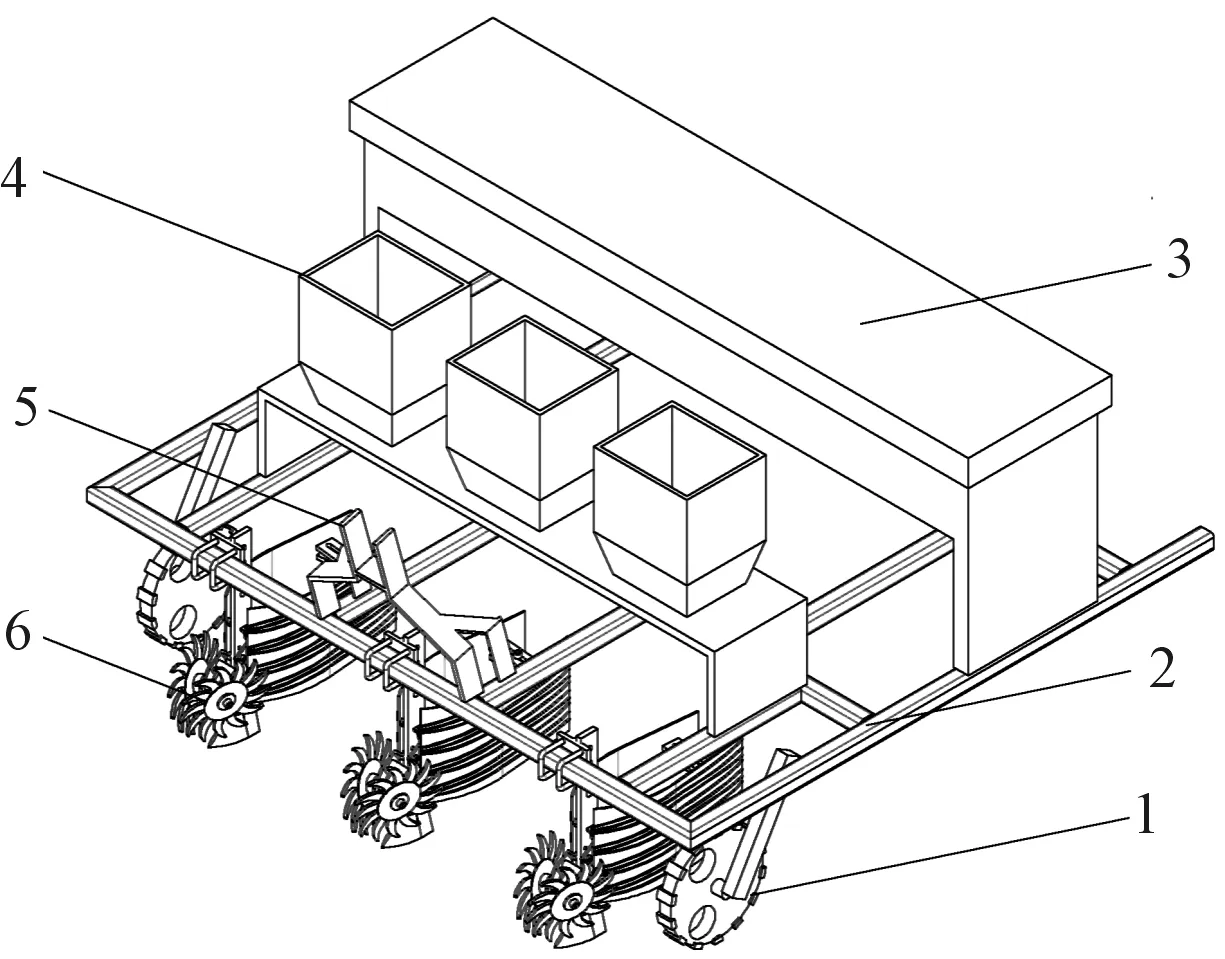
1. 限深轮;2. 机架;3. 肥箱;4. 种箱;5. 悬挂装置;6. 仿生分拨草防堵装置1. Depth limiting wheel; 2. Rack; 3. Fertilizer box; 4. Seed box;5. Suspension device; 6. Biomimetic shifting and diffluence straw anti-blocking device
1.2 仿生曲线的提取
本文以白星花金龟为仿生对象,作为一种长期生活在玉米、小麦等秸秆层中的鞘翅目昆虫,白星花金龟前后肢对禾本类植物具有较高效的拨动分离能力,其在秸秆中爬行时,一对前肢呈“八”字型由前向后运动,将秸秆向侧后方拨离,后肢随后继续完成秸秆的分流,前后肢运动的清秸作用与免耕防堵开沟装置相似[17],以此为启示,借助工程仿生技术手段和方法,设计仿生拨草轮、分草挡板、分草栅条,期望提高此类装置的秸秆清除率和防堵塞能力。
1.2.1 白星花金龟前后肢结构轮廓曲线的提取 提取白星花金龟前、后肢轮廓结构曲线分别作为仿生拨草轮爪和仿生分草挡板轮廓线[18-19]。曲线获取过程如下:将白星花金龟前、后肢置于XTL-165型连续变倍体视显微镜下观察,不断调焦使图像清晰,前、后肢样品调整至最佳位置后分别截图保存[20],所得轮廓结构如图2所示。
使用Matlab软件的rgb2gray、imerode、imdilate、im2bw、Imfill、edge函数命令对图2的轮廓进行处理,使其由原始图像转换为二值图像,得出结构曲线轮廓的坐标点[20-23]。采用二阶拉普拉斯-高斯边缘提取算法将轮廓的坐标点绘制成边界图,所得结构完整,与原图基本一致。边界轮廓如图3所示。
依据设计需求将前肢内、外边界轮廓曲线和后肢外边界轮廓曲线使用Origin软件分别拟合,曲线方程的拟合优度决定了仿生设计精度与加工难度,精度过低,仿生设计不可靠;精度过高,则会增加机具的加工难度。经多次拟合对比,将前肢外、内结构轮廓曲线拟合为最小二乘法五次多项式分别为y1、y2,将后肢外结构轮廓曲线拟合为最小二乘法七次多项式y3,拟合优度R2分别为0.95975、0.85285和0.99502,说明拟合程度较高。多项式方程如下:
y1=-916.46716+21.78817x-0.13697x2+
4.29792×10-4x3-6.71029×10-7x4+
4.13408×10-10x5
(1)
y2=93.63063+3.77977x-0.01874x2+5.45324×
10-5x3-9.34981×10-8x4+6.7427×
10-11x5
(2)
y3=459.48669-27.47246x+1.09975x2-0.02206x3+
2.50725×10-4x4-1.63085×10-6x5+
5.63525×10-9x6-7.9926×10-12x7
(3)
利用Origin软件将拟合函数绘制在直角坐标系中,获得轮廓曲线与拟合曲线对比图以及残差分布图,如图4、图5所示,拟合曲线与原始轮廓基本一致,残差值均匀随机分布于0值两侧,且无异常点,拟合情况良好。
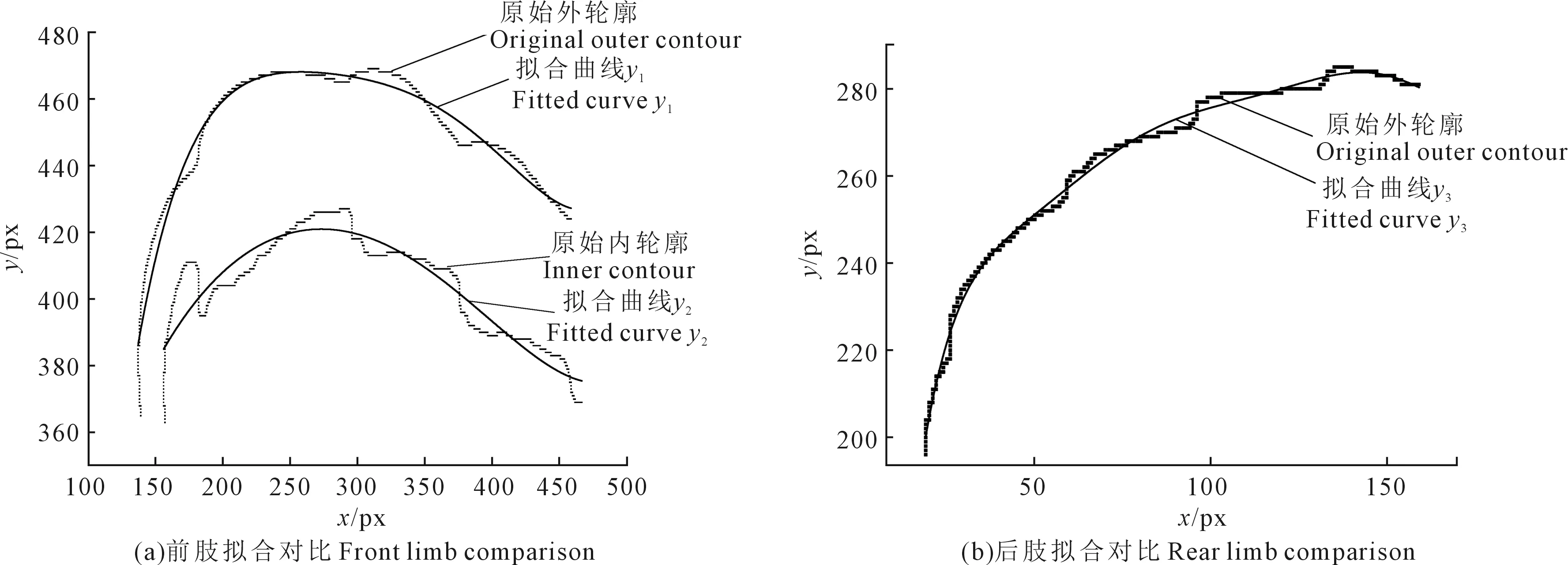
图4 白星花金龟前、后肢边界轮廓曲线与拟合曲线对比图

图5 白星花金龟前、后肢拟合曲线残差图
1.2.2 白星花金龟后肢运动轨迹曲线的提取 白星花金龟实际行进过程中后肢做空间运动,而前述获取的后肢内外轮廓结构曲线仅可用于静态结构仿生,为了进一步还原白星花金龟的运动状态,提高分草挡板的分草清秸效果,提取白星花金龟后肢根部、中部及尾部3点(如图2所示,见325页)动态运动轨迹曲线并设计分草栅条应用于仿生分草防堵装置上。使用高速摄像机拍摄记录白星花金龟的运动过程,利用高速视频目标跟踪测量软件V 1.0,通过白平衡、亮度对比度调节、透视、畸变矫正对拍摄的后肢运动视频进行图像处理,以白星花金龟后肢根部、中部及尾部上3点为运动初始点进行跟踪[19],按照上述相同方法使用Matlab软件处理图像,得出选定目标的运动轨迹如图6所示。
将上述曲线使用Origin软件分别拟合,经多次拟合比较,确定后肢3个点位运动轨迹曲线拟合为最小二乘法七次多项式,根部、中部及尾部拟合曲线分别为y4、y5和y6。拟合优度R2分别为0.98660、0.97938和0.97311,拟合程度较高。多项式方程如下:
y4=111.33972-0.16936x-0.0027x2+3.08872×10-5x3-1.75971×10-7x4+6.07712×10-10x5-1.18327×10-12x6+9.6257×10-16x7
(4)

图6 白星花金龟后肢3 个点位运动轨迹
y5=90.14843-0.09003-0.0027x2+1.38998×10-5x3+3.98935×10-8x4-4.58713×10-10x5+1.14763×10-12x6-9.19282×10-16x7
(5)
y6=73.15929-0.01338x-0.00342x2+1.86646×10-5x3+2.39678×10-8x4-4.45859×10-10x5+1.19097×10-12x6-9.8802×10-16x7
(6)
利用Origin软件将拟合函数绘制在直角坐标系中获得原运动轨迹与运动轨迹拟合曲线对比图以及残差分布图,如图7、图8所示,拟合曲线与原始轨迹基本一致,残差值均匀随机分布于0值两侧,且无异常点,拟合情况良好。
1.3 仿生分拨草防堵装置的设计与建模
通过对白星花金龟肢、后肢轮廓结构以及后肢运动轨迹进行量化分析,根据拟合曲线构建了仿生分拨草防堵装置的三维模型。如图9所示,仿生分拨草防堵装置主要由铲式开沟器、固定支臂、仿生拨草轮、仿生分草挡板、仿生分草栅条、挡板偏角调节装置等部分组成,其中拨草轮轮爪轮廓线为y1、y2曲线,分草挡板轮廓线为y3曲线,分草栅条轮廓线分别为y4、y5、y6曲线投影于分草挡板外侧面上形成,共4组均分布于仿生分草挡板外侧面上。2个仿生拨草轮通过转轴呈“八”字型安装于固定支臂上,固定支臂与铲式开沟器支架相连接,挡板偏角调节装置由与开沟器支架相连接的固定支架、固定圆环、固定板组成;2个仿生分草挡板与开沟器支架铰接,并通过固定圆环与挡板偏角调节装置相连接,仿生分草栅条焊接于仿生分草挡板外侧面。
1.4 运动学分析与结构参数
仿生拨草轮设置有运动偏角,随机器前进作业时,轮爪作复合运动[14]。以仿生拨草轮与地面接触点为坐标原点,x轴和y轴分别平行、垂直于拨草轮盘平面,xoy面水平,z轴垂直于xoy面,建立坐标轴如图10所示。
任一仿生拨草轮爪顶点的运动轨迹方程为:
(7)
式中,v为机具前进速度(km·h-1);δ为拨草轮盘运动偏角(°);ω为拨草轮盘角速度(rad·s-1);R为拨草轮盘的半径(mm)。
绘制任一仿生拨草轮爪顶点的运动轨迹,并将zoy面展开,如图11所示。由图11可知,顶点运动轨迹为空间螺旋线,此时可将其运动分解为从a点到b点的纯滚动和从b点到c点的平移运动,从xoy面内的运动轨迹投影可以看出,拨草轮爪的顶点有比较明显的横向移动,即对秸秆有侧方向的推动作用。当运动偏角δ增大时,相同作业行程内x方向运动距离减小,y方向运动距离增大,即对秸秆的侧向推动作用增强,向后拨动作用减弱;当运动偏角δ减小时,对秸秆的侧向推动作用减弱,向后拨动作用增强。
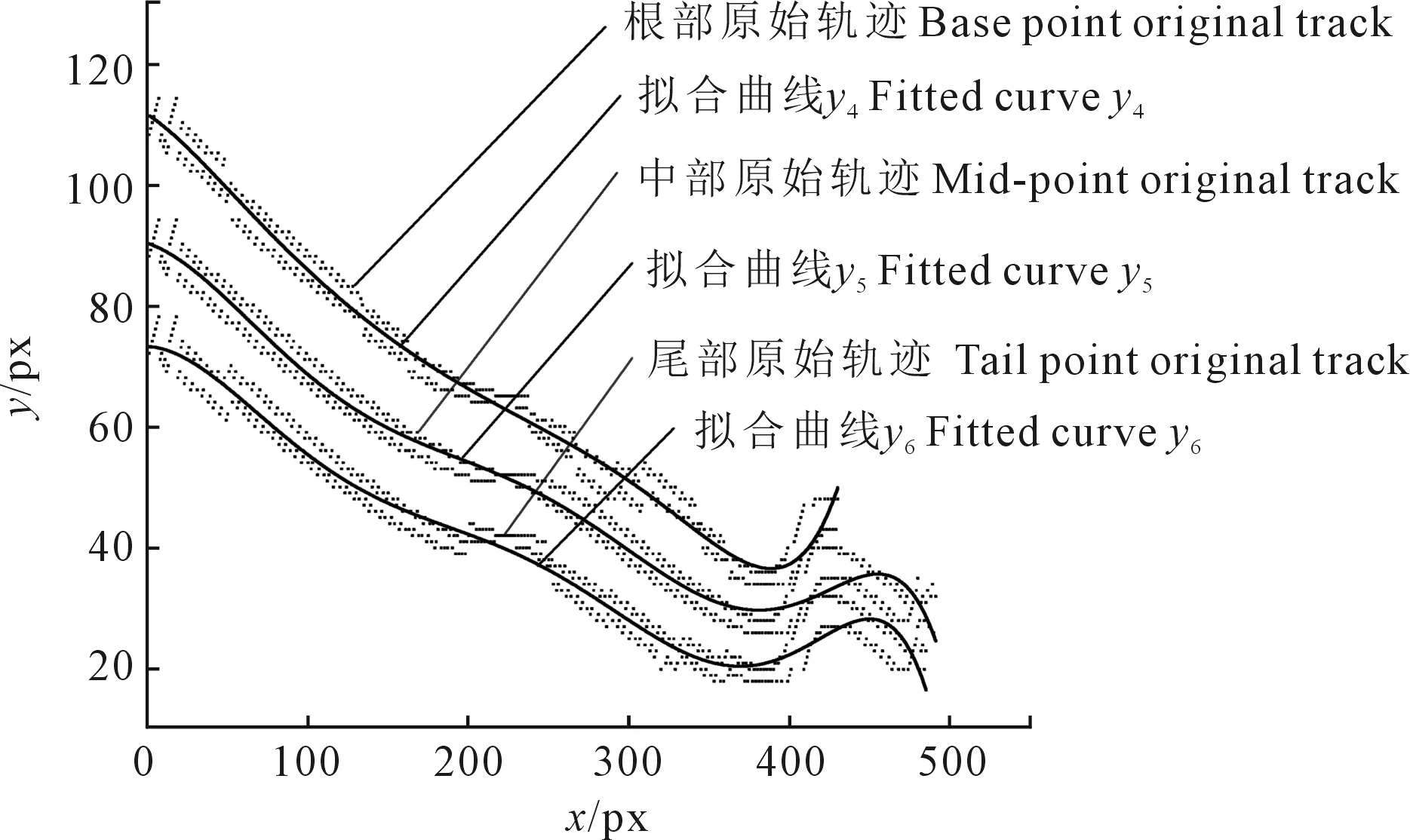
图7 原运动轨迹与运动轨迹拟合曲线对比

图8 拟合运动轨迹曲线的残差
1. 铲式开沟器;2. 仿生拨草轮;3. 仿生分草挡板;4. 固定支臂;5. 挡板偏角调节装置1. Hoe opener; 2. Bionic grass wheel; 3. Bionic dividing baffle; 4. Fixed arm; 5. Baffle angle adjustment device
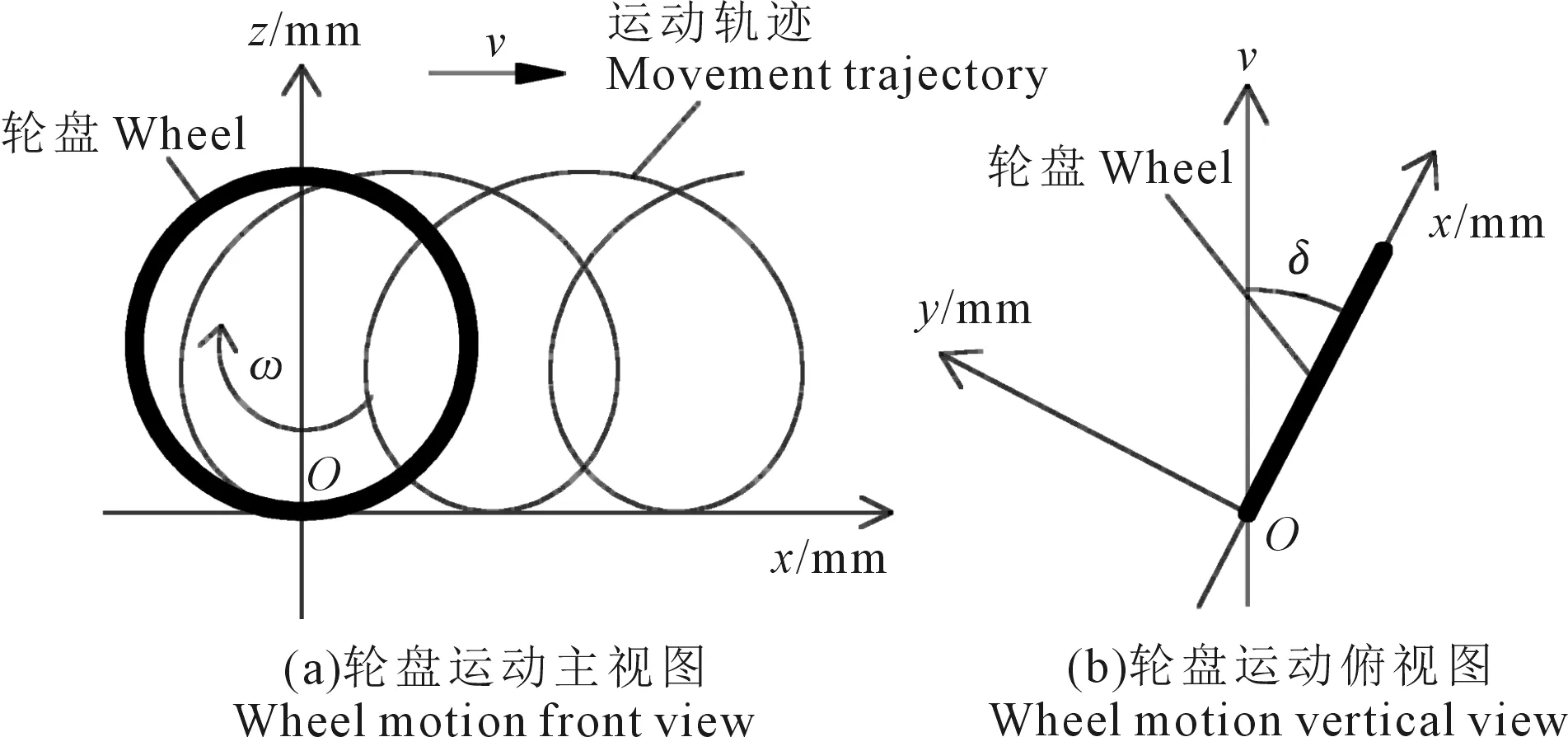
图10 仿生拨草轮盘运动分析简图

图11 仿生拨草轮爪上任一顶点的运动轨迹
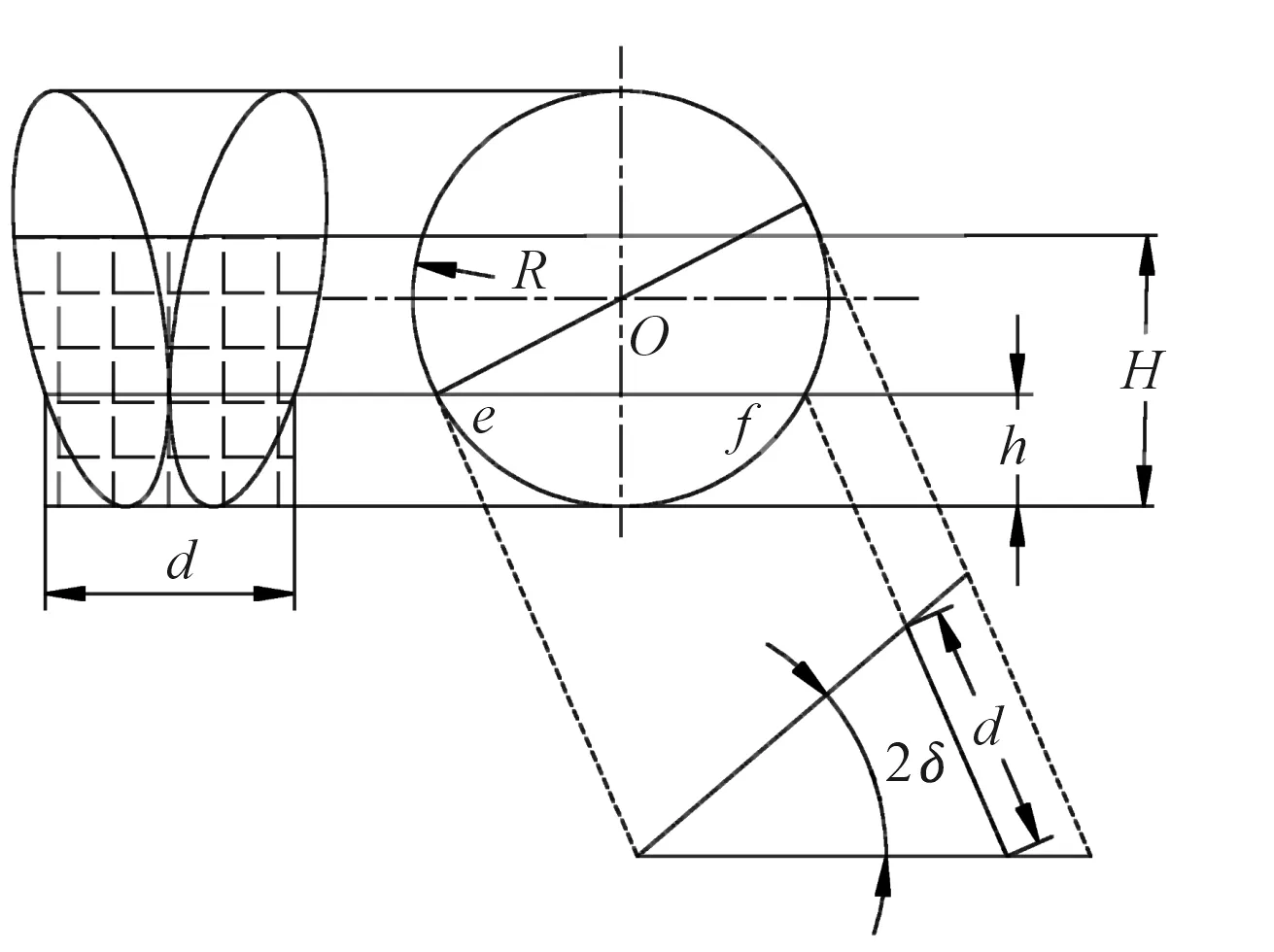
仿生分拨草装置中两拨草轮盘的交汇点高度h(图12)是影响拨草清秸效果的重要指标之一,当h值过小时,秸秆会从交汇点上方进入两拨草轮盘中间并造成堵塞;当h值过大时,两拨草轮在前下方秸秆层位置空间过大,会导致中间秸秆遗漏。为增强拨离作用,通常使h略小于或等于秸秆层的覆盖高度。小麦秸秆留茬粉碎覆盖还田后,碎秸秆覆盖高度约为50~100 mm,并且秸秆层流动性较差,为满足作业要求,本设计选取交汇点高度h=80 mm。
图12中,H为秸秆层的覆盖高度(mm);e为2个仿生拨草轮盘拨草交汇点,h为仿生拨草轮盘的交汇点高度(mm);f为幅宽定义点,d为工作幅宽(mm);δ为运动偏角(°)。
由图12得出仿生拨草装置工作幅宽d的计算公式为:
(8)
式中,L为e点到f点的长度(mm)。
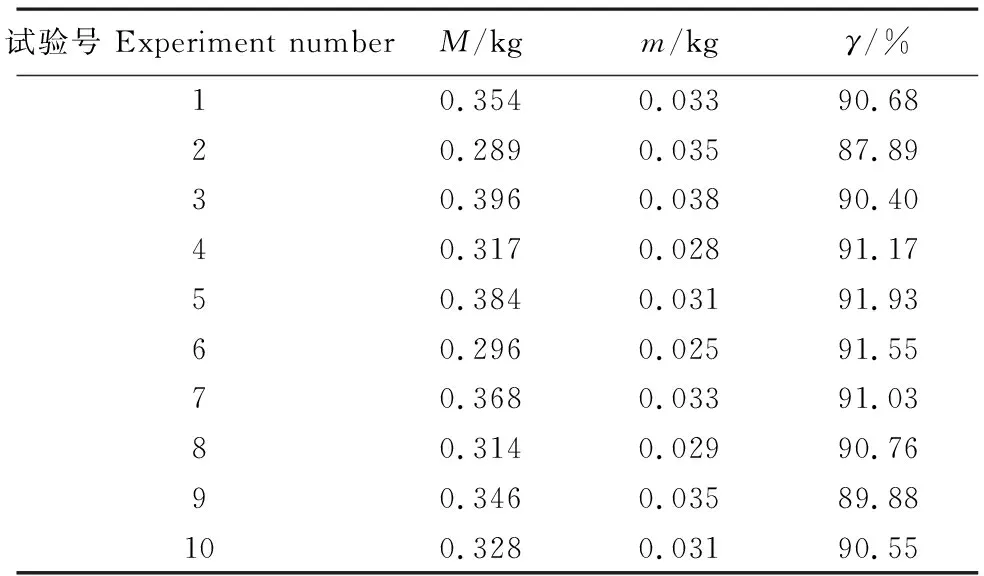
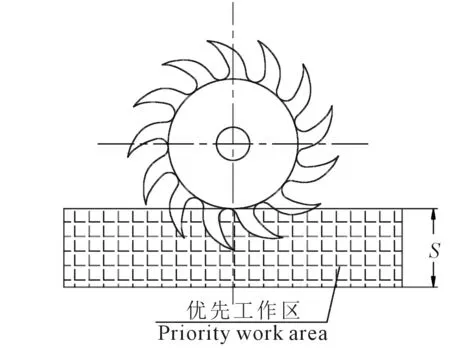
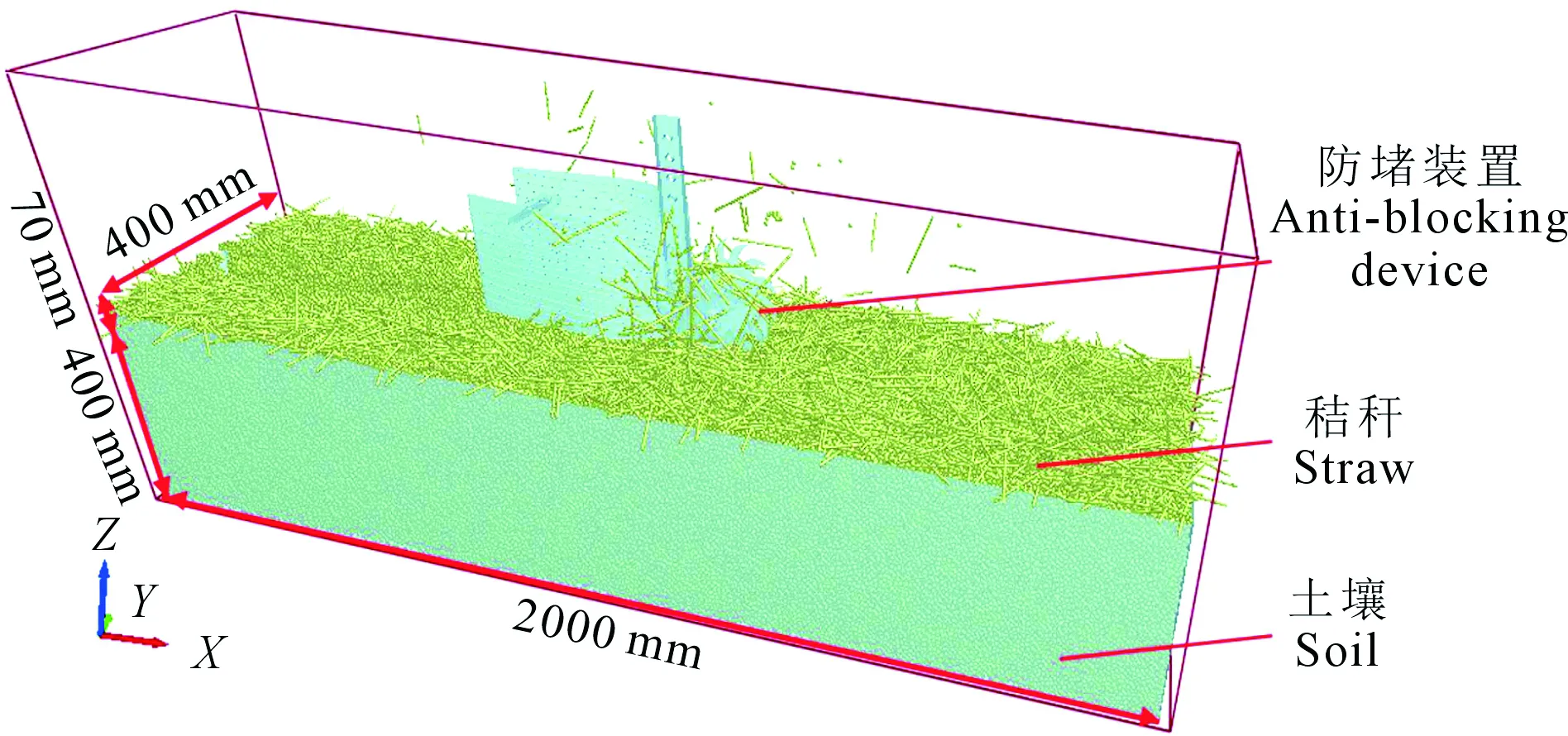
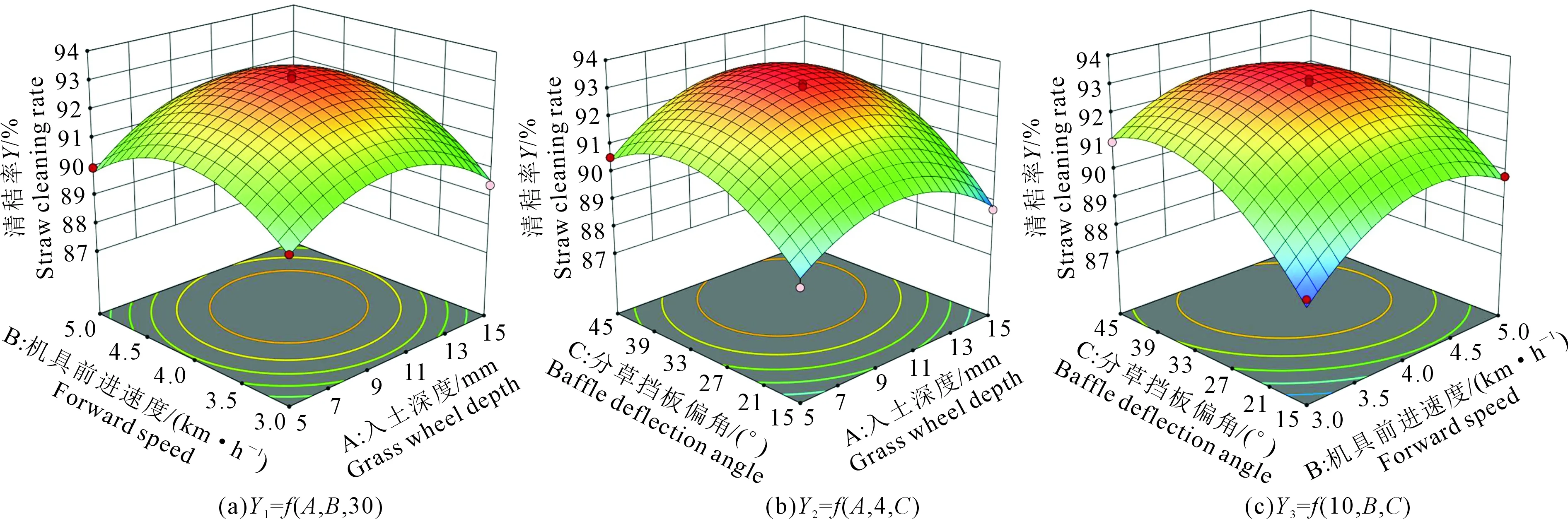
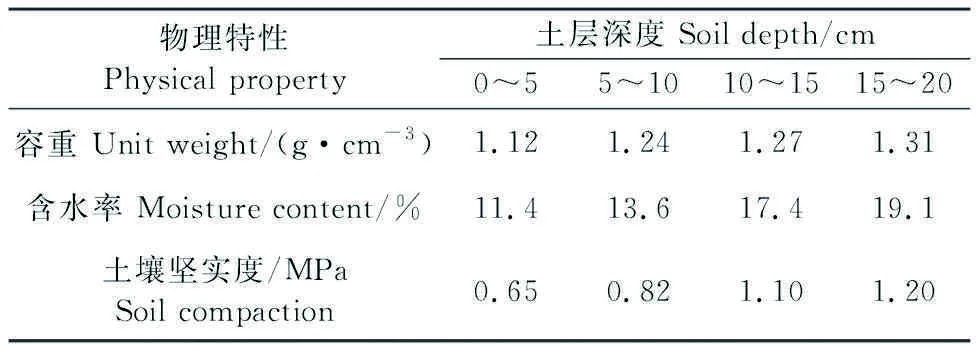
为满足农艺要求,选取工作幅宽d=200 mm,且为满足机具实际的工作要求,应保证H-R 拨草轮爪的数量N也是影响作业效果的重要参数,N过大会增加轮爪插入秸秆层的难度,N过小则连续拨草作业需要的转速过大。参照多齿拨草星轮的设计,轮爪数量一般为9~15个。按照1∶1比例绘制仿生拨草轮盘工作示意图,如图13所示,为使拨草轮盘能在秸秆层中能稳定地连续不断进行拨草作业,当秸秆覆盖高度较小时,应保证优先工作区覆盖高度S内至少有2个以上的拨草轮爪同时工作,选取仿生拨草轮爪数量为13且均匀分布。 在EDEM软件中生成三维尺寸为2 000 mm×400 mm×400 mm的虚拟土床以及厚度为70 mm的秸秆层模型,采用三维建模软件Solidworks对仿生分拨草免耕防堵装置按照1∶1的尺寸比例进行仿真三维建模,以“.x_t”格式导入离散元仿真软件中,颗粒间接触模型为Hertz Mindlin with JKR接触模型[24-26],进行清秸防堵仿真(图14,见325页)。 为获取仿生分拨草装置工作的最优参数组合,以仿生拨草轮入土深度T(A)、机具的前进速度v(B)以及分草挡板的偏角α(C)为试验因素,种带的清秸率Y作为试验指标,采用Box-Behnken试验优化设计方法,进行二次回归正交组合离散元仿真优化试验。试验因素编码如表1所示,试验方案与结果如表2所示。 通过Design-Expert软件对试验结果进行回归分析,如表3所示。影响试验指标清秸率Y的主要因素依次是分草挡板偏角C、机具前进速度B、入土深度A。清秸率Y的试验模型极显著(P<0.01)。机具前进速度B、分草挡板偏角C、入土深度的二次项A2、机具前进速度的二次项B2、分草挡板偏角的二次项C2对清秸率Y存在极显著影响(P<0.01),入土深度与分草挡板偏角的交互项AC、机具前进速度与分草挡板偏角的交互项BC对清秸率Y存在显著影响(0.01 图12 仿生拨草轮盘结构示意图 图13 仿生拨草轮盘图 表1 试验因素编码水平表 Y=92.99+0.28A+0.39B+1.11C+0.34AC- 0.47BC-1.48A2-1.51B2-1.55C2 (9) 通过上述回归模型的失拟性检验,可知P=0.0651>0.05,失拟项不显著,不存在其他影响指标的主要因素存在,试验指标与试验因素存在显著的二次型关系,并且决定系数与校正后的决定系数均接近于1,变异系数小于5%,信噪比大于4,说明回归方程的可信度、精确性、合理性高,回归模型的预测值对试验值有较高的拟合水平。 利用Design-Expert软件,固定3个因素中的一个因素为零水平,通过响应曲面法分析其他两个因素对试验指标的影响和交互作用,绘制自变量与响应值(清秸率)的三维响应面图(图15)。 (1)固定C因素取0水平(30°)时,A因素和B因素对清秸率Y的影响可表示为: Y1=92.99+0.28A+0.39B-1.48A2-1.51B2 (10) 如图15a所示,机具前进速度一定时,清秸率随拨草轮入土深度的增加先增大后减小;拨草轮入土深度一定时,清秸率随机具前进速度的增加同样先增大后减小。同时机具前进速度增加时,清秸率随拨草轮入土深度变化的速率缓慢降低。拨草轮入土深度为9~11 mm,机具前进速度为4.0~4.5 km·h-1时,清秸率较高。 (2)固定B因素取0水平(4 km·h-1)时,A因素和C因素对清秸率Y的影响可表示为: Y2=92.99+0.28A+1.11C+0.34AC- 1.48A2-1.55C2 (11) 如图15b所示,分草挡板偏角一定时,清秸率随拨草轮入土深度的增加先增大后减小;拨草轮入土深度一定时,清秸率随分草挡板偏角的增加同样先增大后减小。同时分草挡板偏角增加时,清秸率随拨草轮入土深度变化的速率降低。拨草轮入土深度为9~11 mm,分草挡板偏角介于33°~39°时,清秸率较高。 (3)固定A因素取0水平(10 mm)时,B因素和C因素对清秸率Y的影响可表示为: 表2 Box-Behnken试验设计及结果 Y3=92.99+0.39B+1.11C-0.47BC- 1.51B2-1.55C2 (12) 如图15c所示,分草挡板偏角一定时,清秸率随机具前进速度的增加先增大后减小;机具前进速度一定时,清秸率随分草挡板偏角的增加同样先增大后减小。同时分草挡板偏角增加时,清秸率随机具前进速度变化的速率快速降低。机具前进速度为3.8~4.5 km·h-1,分草挡板偏角介于30°~36°时,清秸率较高。 以清秸率最大为寻优指标,通过Design-Expert软件中的Optimization模块对回归模型进一步优化求解,其中约束条件为: (13) 从优化结果中选取一组优化方案作为最优参数组合,即当拨草轮的入土深度T为11 mm、前进速度v为4 km·h-1、分草挡板的偏角α为35°时,清秸防堵装置作业性能最理想,此时的清秸率为93.2253%。 表3 方差分析表 图14 仿真作业过程 图15 各因素对清秸率影响的响应曲面 图16 田间试验现场 试验于2020 年9月7日在云南省昆明理工大学呈贡校区保护性耕作试验田(24°51′N,102°51′E,海拔1 892 m)进行,如图16所示,试验期间日平均气温为16.5~23.6℃,试验区域为60 m×5 m坡地,土壤类型为红壤土,土壤容重、含水率及坚实度过高或过低都会减弱拨草轮的被动转动,试验地土壤的物理性质如表4所示。前茬作物小麦种植行距为200 mm,收获后全量覆盖还田,小麦秸秆平均长度为118 mm,秸秆含水率为14.6%,地表留茬高度为5~10 mm,平均残茬(地表以上小麦秸秆及根茬的总称)覆盖率为88.3%,平均残茬覆盖量为0.636 kg·m-2,试验条件满足《中免(少)耕施肥播种机试验准备》(GB/T20865—2017)的规定。试验主要设备:黄海金马304型拖拉机、SC-900土壤紧实度仪、环刀、烘箱、手持便携式气象站、JE502型电子天平。 根据《免耕播种机质量评价技术规范》及农业部农机鉴定总站免耕播种机性能检测要求[27-30],将仿生分拨草防堵装置单体安装于播种机上,以上述最优作业参数进行田间试验,测试内容为播种机通过性、实际清秸率、土壤扰动量。 在一个试验行程中间隔5 m选取10个测试点观察防堵装置的堵塞程度,按照无、轻微、中度、重度堵塞4个标准进行记录,无堵塞或发生一次轻微堵塞为合格。使用台式电子秤测量分拨草免耕防堵装置工作前后测试点中秸秆质量,计算实际清秸率γ,计算公式为式(14),γ值越大越好。测量出实际开沟宽度,取播种行距Z为600 mm,算出土壤扰动量η,计算公式为式(15),η值越小越好。 (14) 式中,γ为实际清秸率(%);M为作业前测试点秸秆质量(kg);m为作业后测试点秸秆质量(kg)。 (15) 式中,η为土壤扰动量(%);W为实际开沟宽度(mm);Z为播种行距(mm)。 种带的实际清秸率、土壤扰动量测定结果如表5、表6所示,实际作业中只在一个测试点发生轻微堵塞,整机的通过性良好;各测试点土壤扰动量测定值较为均匀,平均土壤扰动量为20.00%,满足检测要求;已知目前同类型被动式破茬防堵机构秸秆清除率介于50%~80%,主动式破茬防堵机构秸秆清除率为90%左右,本设计的平均实际秸秆清除率为90.58%,略低于仿真试验结果,清秸防堵效果较好。并且实际秸秆清除率和土壤扰动量变异系数均较小,分别为1.20%和5.30%,证明机器的工作稳定性较好。 表4 试验区域土壤物理性质 1)以白星花金龟为仿生原型,使用连续变倍体视显微镜和高速摄像机获得了其前、后肢轮廓图像及后肢运动视频,用Matlab和高速视频目标跟踪测量软件V 1.0进行图像处理后,采用Origin软件获得了白星花金龟前、后肢轮廓拟合曲线及后肢运动轨迹拟合曲线,并设计了一种新型的仿生分拨草清秸防堵装置。 2)对仿生拨草轮进行了运动学分析,得出运动偏角δ与机具对秸秆的侧向推动作用呈正相关关系,与机具对秸秆的拨动作用呈负相关关系。通过计算分析获得了影响作业性能的结构参数运动偏角δ为30°,拨草轮盘的直径D为204 mm,拨草轮爪数量为13个。 3)采用Box-Behnken试验优化设计方法,进行二次回归正交组合离散元仿真优化试验,通过Design-Expert软件对试验结果进行分析,获得了最优作业参数组合:拨草轮入土深度T为11 mm,机具前进速度v为4 km·h-1, 分草挡板偏角α为35°。 表5 种带秸秆清除效果测定表 4)田间试验结果表明,安装仿生分拨草防堵装置后,整机的通过性良好,平均秸秆清除率为90.58%,平均土壤扰动量为20.00%,秸秆清除率和土壤扰动量变异系数分别为1.20%和5.30%,作业质量稳定,符合免耕播种机作业的农艺和技术要求。2 分拨草防堵装置离散元仿真
2.1 DEM模型
2.2 仿真优化试验
2.3 试验结果与分析



3 田间试验
3.1 试验条件与仪器设备

3.2 试验指标与方法
3.3 试验结果与分析
4 结 论