基于卫星通信的信标机设计∗
2023-08-04武慧军
温 倩 施 睿 文 丰 武慧军
(1.中北大学电子测试技术国家重点实验室 太原 030051)(2.中国运载火箭技术研究院空间物理重点实验室 北京 100076)
1 引言
在飞行器飞行试验过程中,通常会需要将飞行数据采集、存储至飞行记录器中,试验参数的获得需要快速准确地回收飞行记录器。目前我国惯用的落点搜寻还停留在较为原始的方法,无法准确、快速地实现回收[1]。基于此问题,本文提出了一种新型的落点回收的方法,根据该方法设计的信标机,可以随飞行记录器一起下落,并在下落过程中以一定频率实时发送位置坐标,实现落定回收[2]。目前这种方法已成功应用于某航天项目中,并取得了良好的效果。
本文提出的设计方法主要由天线单元、定位和通信组件、主控单元,电源管理等部分组成。根据该方法研制的信标机规避了传统信标机功耗高、定位时间长、适用范围小的缺点,可实现记录器下坠过程中或落地后的快速定位和及时发送,提高了回收效率[3]。
2 提出设计方法
目前常用到的目标追踪和落点搜寻方法有以下几种。
1)利用肉眼搜寻:该方法主要是通过改变飞行记录器的外观,使其具有明显的特征,从而进行搜寻[4]。例如,(1)飞行记录器在落地时遭到激烈冲击触发装置喷出烟雾,引导搜寻人员找到落点位置,这种方式成本低,在晴朗无风的天气可以实现快速搜寻;(2)在飞行记录器表面涂上亮眼的颜色、这种方法提高了在空旷地带的搜寻率,但需要对落点位置有一定的预测,如果落点范围太广、环境较复杂,想要快速搜寻仍然困难;(3)在飞行记录器上安装亮度较强的发光装置,方便在光线较暗的环境下搜寻,在晴朗的日间仍不方便回收。
2)利用电磁波的反射原理搜寻:该方法主要是将雷达发射台发射的电磁波遇到待寻目标后反射回的电磁波与未遇到目标正常发出的电磁波对比,通过改变的方向和时间差,即可确定落点的大致方位[5]。这种方法更适用于大型目标的搜寻,且要求落点位置必须有雷达基站的存在,成本大,布设困难,不利于推广。
为了解决上述方法存在的问题,提出了一种基于卫星通信的定位方法,如图1 所示。该方法基于GPS/BDS 导航卫星可方便快速的对目标的位置实时跟踪和定位,当定位成功后通过北斗通信卫星实现坐标的发送,从而实现定位回收[6]。
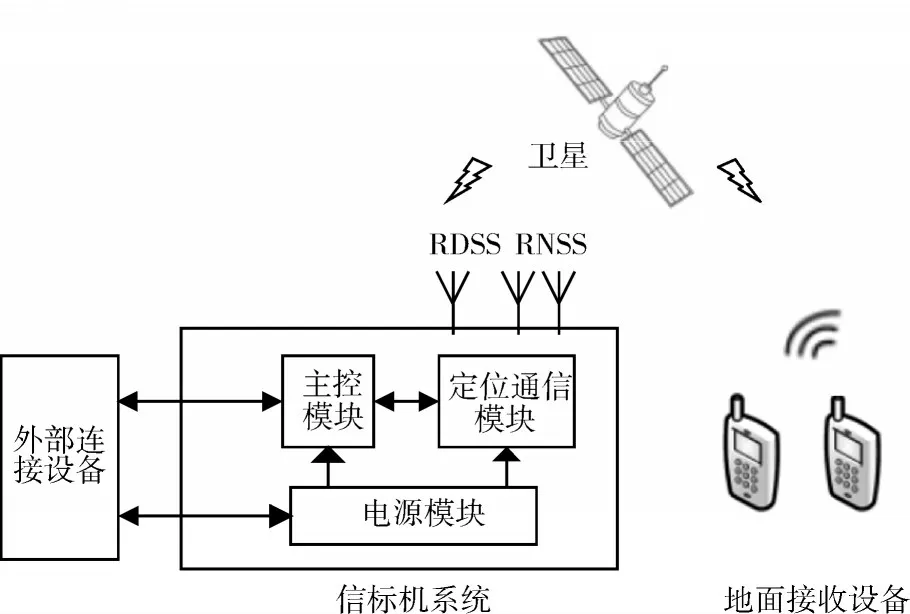
图1 系统总体方案图
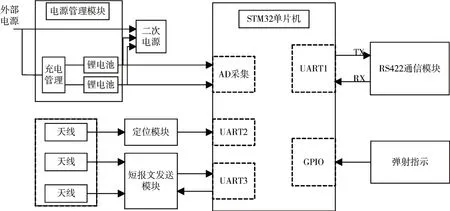
图2 各模块连接示意图
3 实现设计方案
信标机系统主要将天线单元、主控逻辑、定位及通信、电源管理等进行模块化设计。各模块之间通过主控制器调度控制,实现位置信息的获取、解析和发送。
3.1 天线单元设计
随着军民两用信息技术不断发展,信息通信的发展向航空一体化方向发展。天线作为无线通信系统中电磁波的转换装置,是系统中基本且重要的基础部件[7]。
本次设计选用的天线是圆极化天线,主要因为其可以接收圆极化、线极化和椭圆极化的波,且该天线使无线电波的极化面与大地法线面之间的夹角可以360°周期变化,增加了信号的接收概率[8]。此外,对于电磁波而言,雨雪和云雾等介质是均匀介质,电磁波传播过程中遇到均匀介质的反射可以进行左右旋圆偏振波的相互转换。这就要求接收信号的物体可以接收到穿过非均匀介质后产生的线极化和圆极化分量,这也是选择圆极化天线的重要因素。本次设计选用的天线指标如表1 所示。

表1 选用天线指标
3.2 主控逻辑设计
主控单元选用可进行IAP 编程的单片机作为控制芯片,主要功能是对定位信息的编帧、解析和传送,同时对各个模块进行调度控制[9~10]。
系统加电后,信标机以100ms的频率实时刷新定位信息,并将该位置信息编帧后通过422 接口按照一定格式发送给外部连接设备,若当前定位信息有效,则将位置信息存放在内部缓存队列中,若当前定位信息无效,则不写入缓存队列;当信标机系统与外部连接设备分离后自动切换为内部锂电池供电,定时器以此为零点开始工作,在T1 计时标志有效后,判断缓存中的定位信息是否有效,若有效,由内置的SIM1 立刻发出一组定位信息,之后等T2计时标志有效,则由SIM2 再发出一组定位信息,60S 后由SIM 卡1 和SIM 卡2 交替将位置信息发送到地面接收设备,通信频次为32s/次。
此外,控制器支持IAP 编程,可在系统运行过程中通过对FLASH 区域的替换和擦除实现对用户程序的更新。单片机系统主要设计Boot 和FLASH_APP 两段程序。Boot 程序主要实现执行程序的远程更新及向执行程序跳转两项功能。FLASH_APP 程序分为A、B 两个区域进行存储,A区放置当前运行的程序,B 区放置当前更新的程序,当程序接收校验无误后从B 区拷贝至A 区,并从A区引导执行[11]。主控逻辑流程如图3所示。
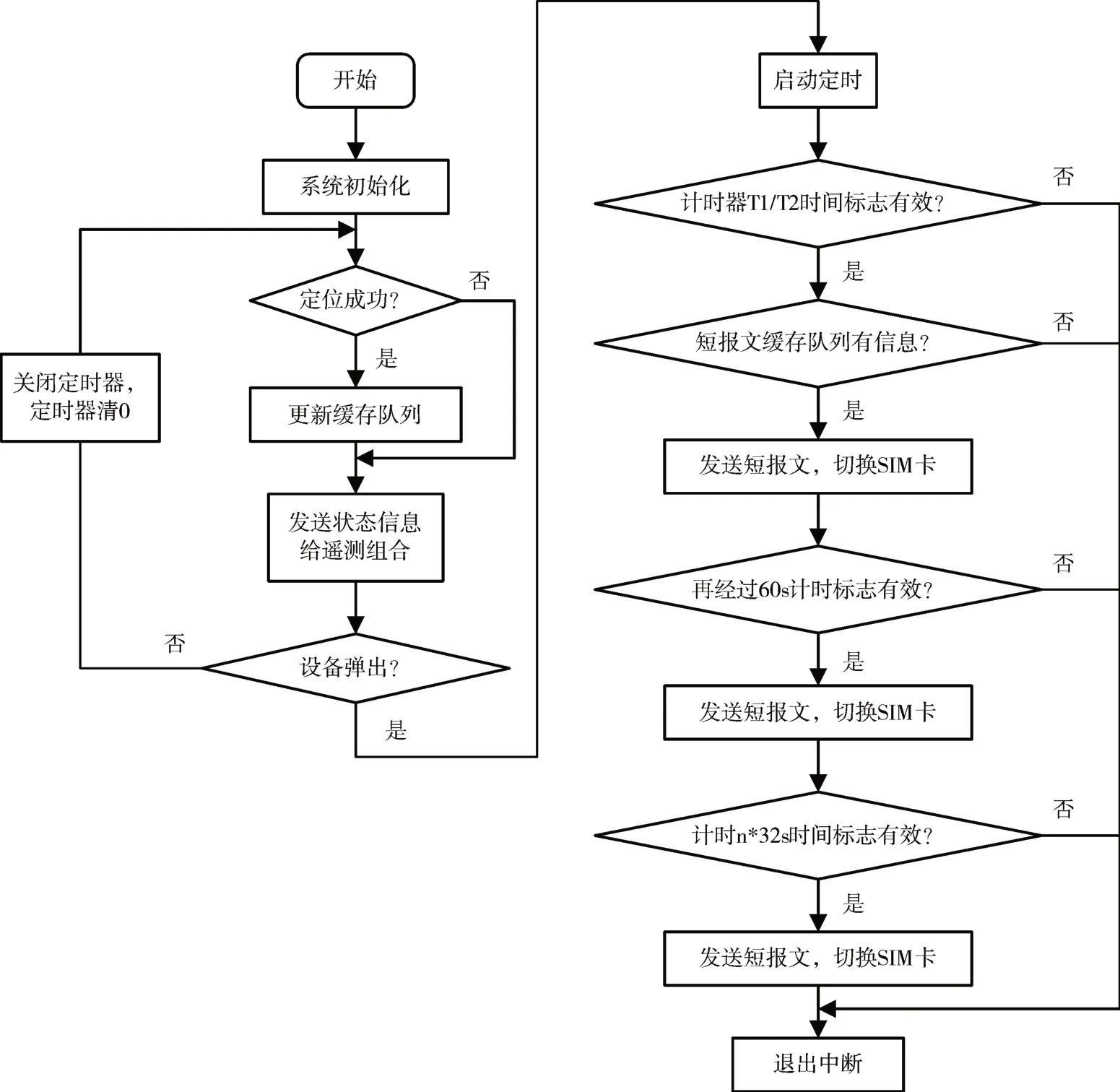
图3 主控逻辑流程图
3.3 定位及通信设计
由于此次提出的信标机设计方法是为了满足小型化设备的回收问题,所以在选择定位模块时除了定位精度和刷新精度之外,还需综合考虑尺寸大小、电源功耗以及系统集成度和成熟性[12]。综合考虑上诉因素,设计的信标机选用了一款北京东方联星公司的小型化定位模块,可实现60s 内快速定位,水平定位精度10m,垂直定位精度15m,可满足设计所需。
通信主要是利用北斗卫星独有的短报文功能完成实时定位信息的发送,在选型中也要考虑信标机小型化的要求[13]。同时为了提高信标机通信的效率和容量,降低通信模块及其附属天线的设计难度,采用两张北斗SIM 卡作为通信发送方,该卡被允许的通信频率为1 次/min,若时间间隔未到1min,则通信请求不被响应。鉴于上述原因,提出双SIM 卡交替通信的构想,增加通信频率,使整体通信更加稳定可靠[14]。
信标机外接电源上电后,实时刷新定位信息并将其存放在缓存队列中,最多可存放三条,当记录器与飞行器分离进入定时流程后,当计时标志和定位信息有效后,将缓存的短报文发送给北斗模块,发射按照北斗4.0协议执行如表2所示。
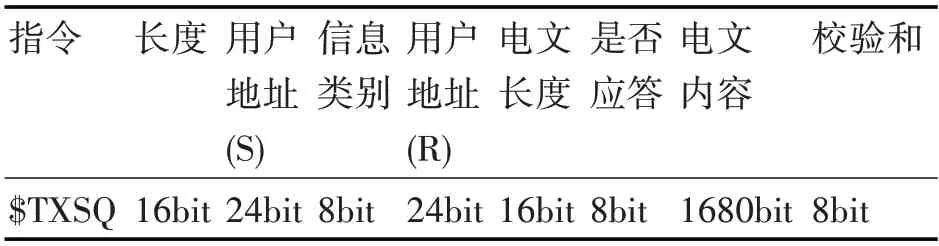
表2 北斗4.0通信协议
通信信息类别如表3所示。
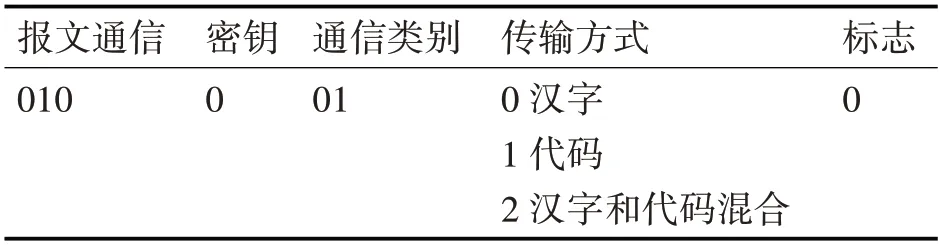
表3 通信信息类别
3.4 电源管理设计
根据使用要求,需对信标机的电源进行管理,具体包括电池充放管理和电池静态损耗管理[15]。
1)电池充放管理,旨在确保信标机脱离飞行器后的工作性能和工作时长。设计选用型号为BQ24105的充电芯片对锂电池进行充电,充电过程分为预充电、恒流充电和恒压充电三个阶段,预充电阶段先以小电流对电池充电至设置的阀值后进入恒流充电阶段,预充电的目的在于避免突发大电流对电池造成损害;恒流充电阶段进入快速充电模式,当电量充至90%后进入下一阶段;恒压充电时电流会随着电池电量的增加而减小,避免电池过充[16]。
信标机内部集成两块锂电池互为备份,电池电压为8.4V,单个电池容量为500mA/h,内部设计双路充电管理电路分别对双冗余锂电池进行充电管理。对锂电池进行充放电测试,测试结果如图4 所示。
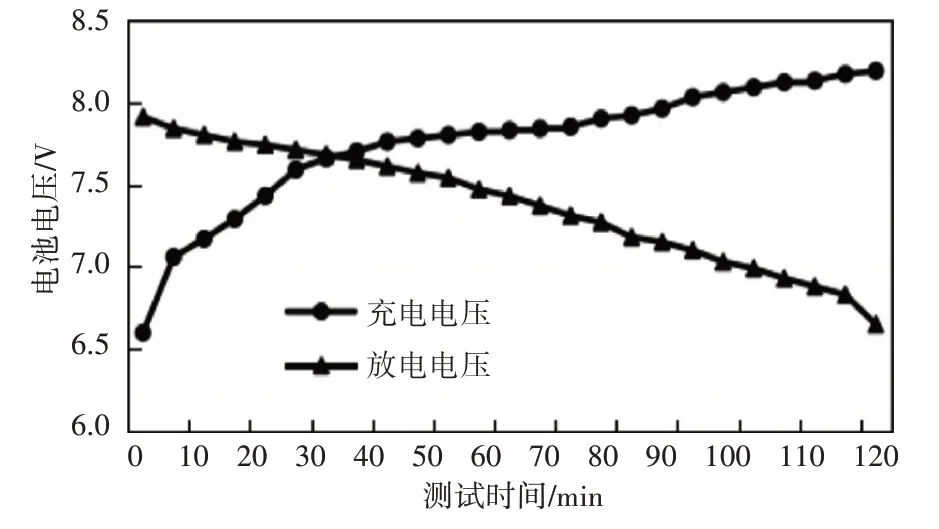
图4 电池充放电曲线图
2)电池静态损耗管理,本次设计中电池的静态功耗主要是由电源芯片的静态电流产生。由于电源芯片在电路中只起到稳压的作用,不参与电路板功能的实现,所以在理想状态下希望其本身不要有损耗。为了实现低功耗设计,选用了静态电流为70 μA 的电源芯片,且电路设计中加入了继电器来控制电路的通断。
4 验证设计思路
针对上述设计,对信标机进行功性能测试。测试方法主要分为三个部分:自检测试、通信测试和模拟测试。
自检测试包括对通信模块信号测试和自发自收测试;对定位模块的性能测试。
单元测试是对整体系统的功能测试。
模拟测试是模拟飞行过程中的信标机,对其进行功能性测试。
4.1 自检测试
自检测试主要防止电路板设计不当产生的干扰对北斗通信、定位功能及北斗用户卡造成不良影响。如图5 所示,图(a)为标准版测试图,图(b)为本次设计的电路板测试图。由图5 可知,PCB 设计连接对通信模块的信号影响较小。
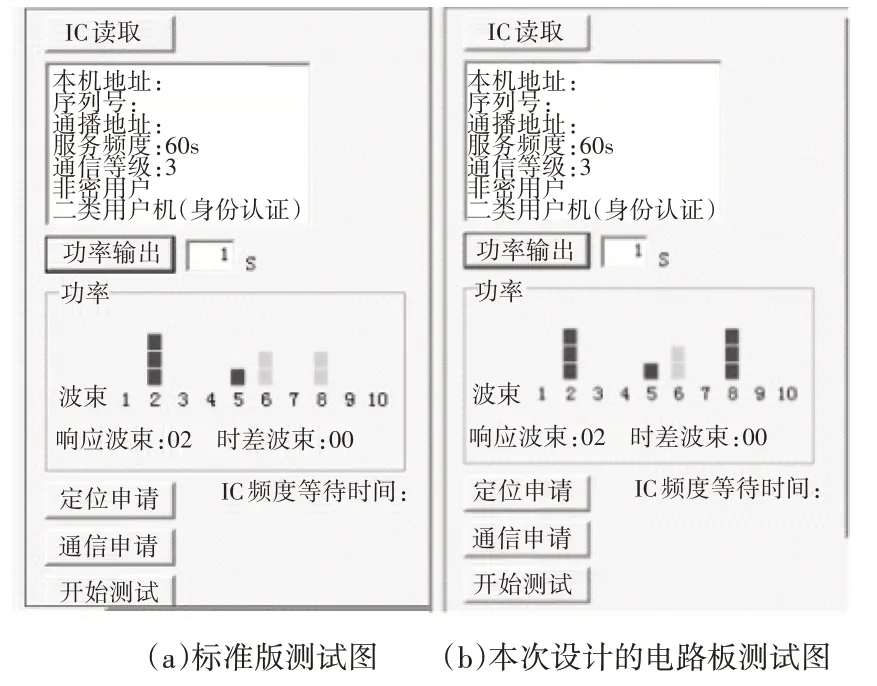
图5 通信波束信号对比
对北斗通信模块的自发自收功能进行验证,如图6 所示。测试方法是设置好北斗卫星具体的收信方和收信内容,通信模块按照每分钟1 次的频率发送通信申请后,测试通信申请是否成功及是否收到北斗卫星向指定设备发送的反馈。
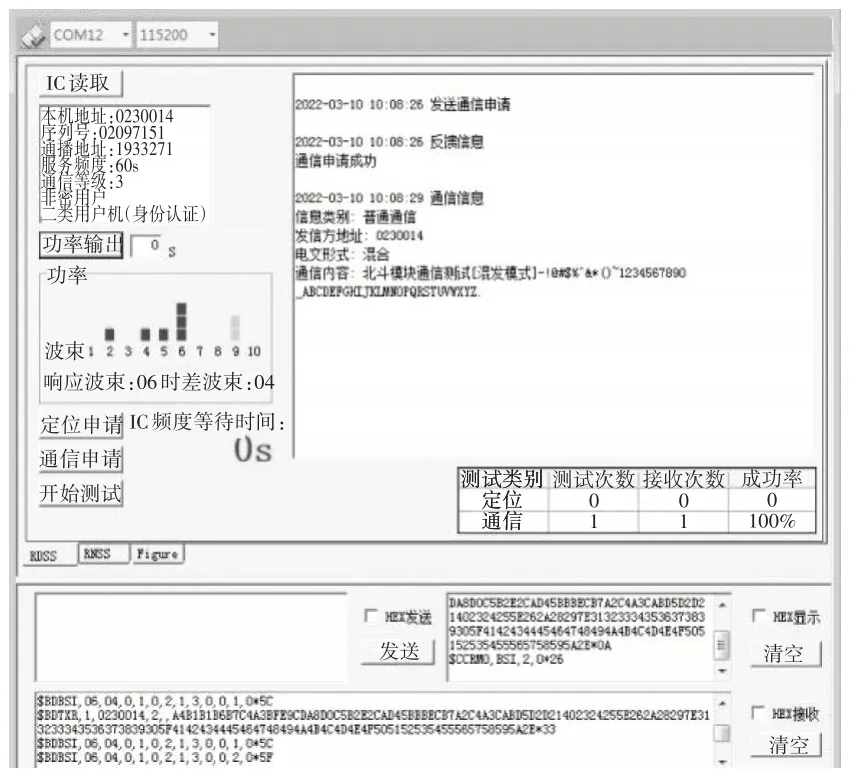
图6 自发自收功能测试图
定位功能的自检测试图如图7 所示,该图显示了信标机所在区域的卫星分布情况、卫星序号、定位模块捕捉到的卫星及其信噪比情况。文字区域中帧头为$GPGGA 的一帧数据中含有定位状态、卫星颗数和经纬度及高度信息,图中所示的位置坐标为“东经112°35.91756′、北纬37°44.06335′、海拔773m”。

图7 定位功能测试图
4.2 单元测试
信标机在进行单元测试时需保证在断电之前定位成功,并通过422 接口将定位信息反馈回来,如图8 所示,可实时观测电池电压、定位状态、电源在线情况、及定位后的位置坐标。图中显示的位置坐标都是以ASCII 码的形式显示的,转码后的位置坐标为“东经112°36.03109′、北纬37°44.06492′、海拔785.3m”。
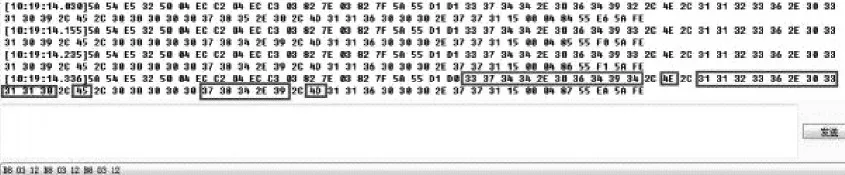
图8 通信测试图
系统断电后,由内部锂电池供电,切换SIM 卡交替向外部接收设备发送短信,短信内容接收最近三次的位置信息,如图9 所示为地面接收设备接收到的北斗卫星反馈内容,内容显示坐标为“北纬37°44.06818′,东经112°36.03088′,海拔772m”。
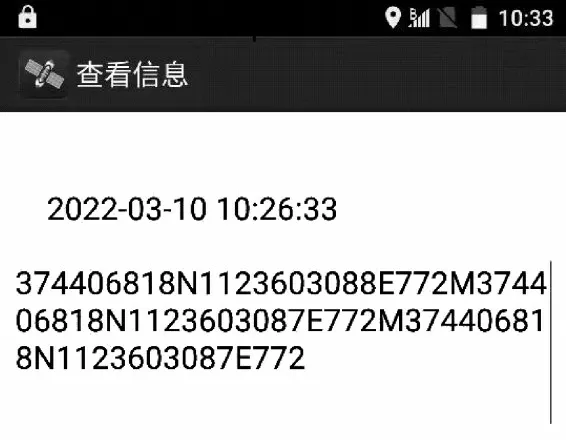
图9 接收到的定位信息内容
如图10 所示为接收设备接收到反馈的时间,由此图可验证信标机系统的工作流程,地面接收设备在T1 时刻接收到SIM 卡1 发送的信息,在T2 时刻接收到SIM 卡2 发送的信息,T1、T2 时刻设置时间间隔为3s,并设置T2+2min 后以次/32s 接收双卡交替发送的信息。
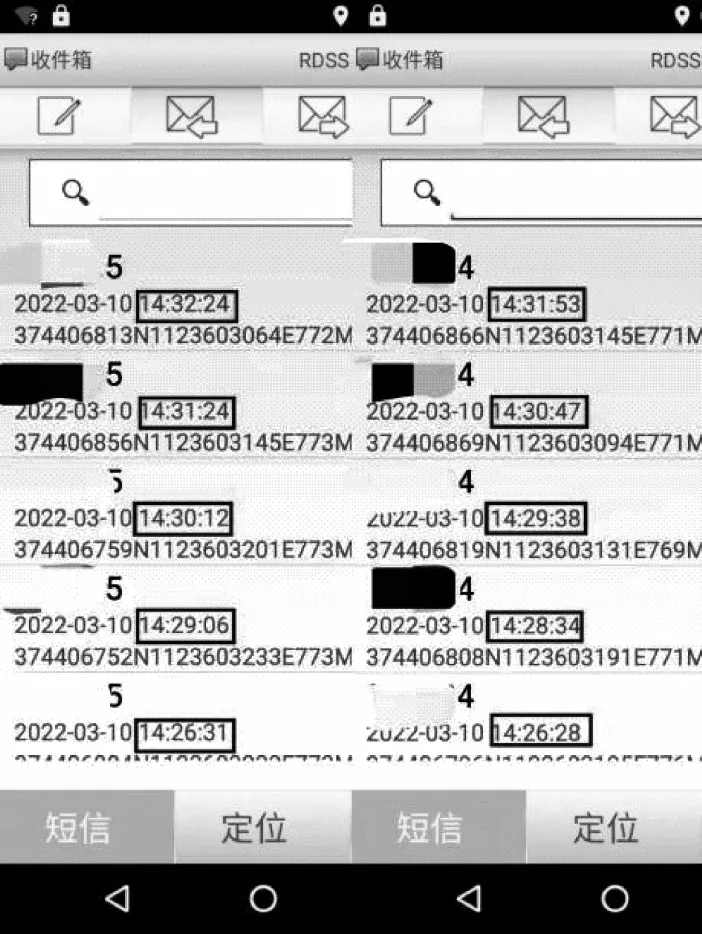
图10 系统工作流程验证图
4.3 模拟测试
在模拟测试下,信标机装置在户外空旷地带的各个方向测试产品的工作逻辑和工作性能。通过外接的测试工装给定位装置供电,户外测试图如图11所示。
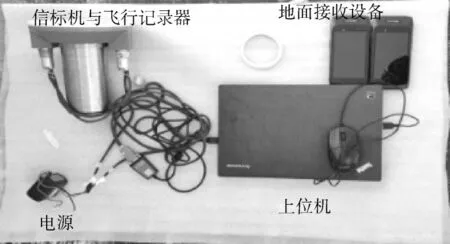
图11 户外测试图
定位成功后,模拟弹射筒弹出及其在下落过程中的工作状态,按照系统工作流程测试信标机的定位功能,统计信标机在不同方向下重要时间节点的短报文状态及测试10min收到的短报文个数如表4所示。
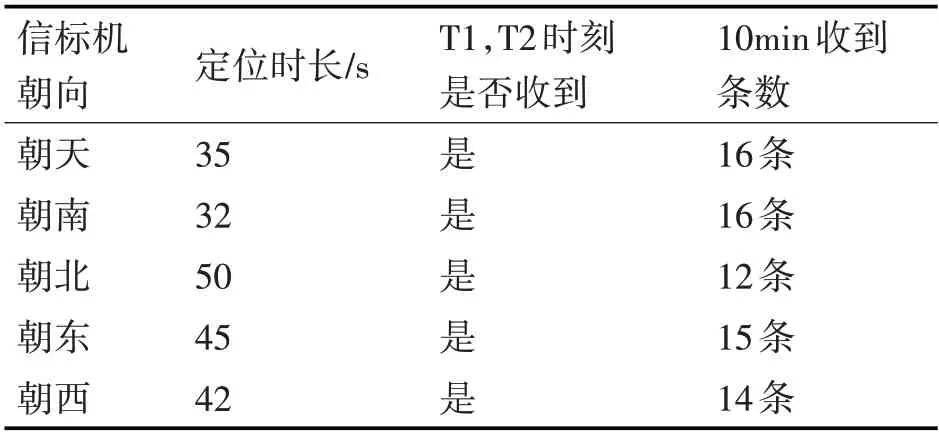
表4 户外测试结果
由上述测试结果表明,按照此方法设计的信标机系统可以正常实现定位和通信功能。
5 结语
本文提出一种基于卫星通信的信标机设计方法,并且根据该方法设计出一款信标机进行了实验验证,验证结果表明信标机系统具备所需的功能性,可以做到快速、准确、稳定地回收目标物。本次提出的信标机设计方法突破了目标物与搜寻人员的距离限制,也不需要大规模的基站铺设,成本低,应用范围广,具有较好的参考价值和应用前景。
