基于虚拟现实与触觉反馈技术的腰硬联合阻滞教学平台的研发应用
2023-08-02解慧泓龚灿生
郑 艇 解慧泓 高 飞,2,3 龚灿生,2 叶 鹏,2
(1 福建医科大学省立临床医学院,福建省立医院麻醉科,福建 福州 350001;2 福建省急救中心,福建省“一带一路” 联合共建实验室,福建 福州 350001;3 福建省急救中心,福建省急诊医学重点实验室,福建 福州 350001)
椎管内麻醉在分娩、泌尿外科手术、下肢骨科手术及慢性疼痛处理方面相较于全身麻醉有着无法替代的优势[1-2]。然而椎管内穿刺属于侵入性操作,初学者因缺乏临床经验在进行盲目穿刺时会显著增加硬膜外穿破后头痛以及血管损伤的发生率。这些风险及并发症使学员获得独立操作的机会大大减少。当前广泛应用于临床教学的标准化解剖模型无法精确还原解剖层次。针对椎管穿刺操作,体验穿刺针接触不同解剖层次的触觉反馈变化是一种重要的提示针尖位置和帮助操作者调整穿刺路径的方法,也是帮助初学者掌握该操作的重要临床体验。目前国内外尚未有将力反馈技术全程运用于椎管内麻醉教学的相关报道。笔者所在团队将虚拟现实与触觉反馈技术相结合,开发了虚拟腰硬联合阻滞教学平台,克服了模型教学的缺点,为学员提供高仿真、可重复操作的训练环境,并加深学员对椎管解剖的理解。本研究主要通过观察和研究学员的模拟培训、评估教学效果及反馈来检验该平台的教学成果。
1 资料与方法
1.1 建立模型 选择1名25岁男性健康志愿者的腰部CT和MRI影像学资料进行三维重建,该志愿者BMI为20.2 kg/m2,既往无手术史和外伤史,通过X线检测显示腰椎正常。采用MMICS 21.0软件进行阈值分割和区域生长,提取肌肉、韧带、脊柱和神经等结构,重建各部分的3D模型。采用3D MAX 2020软件将L1~5椎体、棘上韧带、棘间韧带、黄韧带、背部肌肉及神经等解剖结构的模型进行整合。根据健康志愿者的影像学资料,调整各部分的位置及结构厚度,并绘制全身皮肤贴图,创造手术室环境。在穿刺时,系统提示穿刺针矢状面、水平面最大偏移角度及穿刺针深度。在穿刺结束后,通过隐藏不同解剖结构,可显示穿刺针的位置以判断穿刺失败的原因(图1A)。最终将生成的模型转换为FBX格式文件,导入UNITY 3D 2018虚拟现实开发平台,并将其设计成可交互的虚拟腰硬联合阻滞教学模型(图1B)。

图1 模型建立
1.2 触觉赋值 招募20名椎管内穿刺经验丰富(人均超过200次椎管内麻醉)的麻醉医师参与力反馈模拟器数据采集工作[3]。采用3个自由度的Geomagic Touch X力反馈装置作为触觉设备(图1C)。根据临床经验对穿刺行径过程中针尖接触不同组织时所产生的触觉反馈进行赋值。对白色框中的“Gain”系数进行调整,其单位为0.1(图1D)。取各感觉事件系数的均值,其中系数1的值约为7 N。感觉事件主要包含以下:①消毒刷接触皮肤的力。②穿刺针在皮下组织中感受到的力。③穿刺针在棘上韧带感受到的力。④穿刺针在棘间韧带感受到的力。⑤穿刺针穿刺至黄韧带时的力。⑥穿刺针在硬脊膜感受到的力。⑦穿刺针触及骨表面的力。
1.3 虚拟仿真培训及实施 本研究纳入福建医科大学麻醉学系20名未有过椎管内穿刺经验的实习生,部分入选者学习过椎管内穿刺相关知识或观摩过临床操作,但均无临床或模拟器的实际穿刺操作经验。在培训前,获得每位学员的知情同意,并填写1份问卷以评估其在椎管内麻醉的培训经验。20名学员均接受60 min的关于正中入路腰硬联合阻滞的理论教学,内容是临床操作演示和演示视频播放。在完成教学内容后,每人每日在虚拟模型上训练5次,每次休息15 min,连续训练6 d,完成30次训练。为了避免每个学员相互观察,均单独进行训练。本研究运用虚拟现实联合触觉反馈技术完成了腰硬联合阻滞教学平台的建立。所有参与者均佩戴HTC VIVE设备,坐在经过改造的桌面平台前,通过VR眼镜观察虚拟模型及场景,采用Geomagic Touch X力反馈设备,对标准体质量及年龄的计算机虚拟患者进行正中入路椎管内穿刺。每个穿刺步骤都根据临床操作设计完成,依次包括定位穿刺点、消毒、铺巾、局部麻醉、硬膜外穿刺、腰麻针穿刺、硬膜外腔置管。在穿刺结束后,出现解剖学习界面,识别背部不同肌肉的解剖位置、形态,巩固知识。
1.4 评价指标 由2名经验丰富的麻醉医师使用总体评分表(Global Rating Scale,GRS)[4]、Checklist检查表对学员的操作表现进行评估[4],主要评估指标包括GRS评分、Checklist评分以及从确定穿刺点到固定好硬膜外导管的操作全程时间。运用20名学员的操作全程时间拟合关于操作次数的学习曲线,并绘制GRS评分、Checklist评分随操作次数的变化曲线,评估平台的易上手程度及学员的学习效果。在训练结束后,每位学员完成1份关于虚拟教学平台的调查问卷。GRS内容包括物品准备、不损害组织、运用有效的时间和动作进行操作、处理仪器的流畅程度、操作步骤的流畅程度、相关知识的了解程度、全程表现共7个方面,每个方面从按照表现的好坏程度分别记为1分、2分、3分、4分、5分(1分为最差,5分为最好),总分为35分,该量表重点在于评估平台的易上手程度。Checklist检查表内容包括确认穿刺部位,消毒、铺巾,局部浸润麻醉,运用气泡压缩试验逐层穿刺,到达黄韧带,突破黄韧带、体验落空感,未突破硬脊膜,细针穿刺、拔出针芯,置入硬膜外导管,固定、贴敷料共10个操作步骤,当某一阶段没有完成、表现不佳或表现良好时,分别给出0分、1分或2分,总分为20分,该量表重点在于观察学员每个穿刺步骤的具体表现。
1.5 统计学分析 采用SPSS 25.0统计学软件进行数据收集和分析。计量资料采用(±s)表示,组间比较行t检验;计数资料采用[n(%)]表示,组间比较行χ2检验;P<0.05表示差异有统计学意义。
2 结果
2.1 力反馈赋值 20名麻醉医师调整力反馈系数,取各解剖层次系数的均值,转换成牛顿力,赋值于虚拟模型中。见表1。

表1 20名麻醉医师进行力反馈赋值
2.2 学习曲线 在每位学员进行的30次穿刺操作中,时间最长为10.2 min,最短为2.2 min。随着操作次数的增加,穿刺时间逐渐缩短,从第10次开始进入学习稳定期,表明学员的穿刺技能达到熟练,时间稳定在2.4 min。见图2。
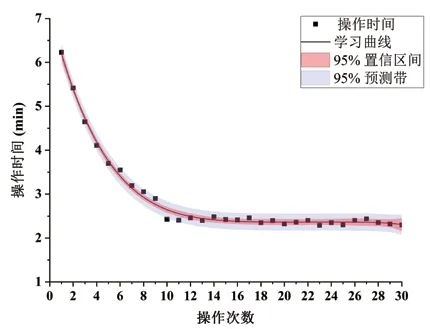
图2 学员每次操作时间的学习曲线
2.3 GRS评分及Checklist评分 随着操作次数的增加,学员的GRS评分得分逐渐升高,从第8次开始,分数趋于稳定。在30次操作后,GRS平均得分为32.8分(满分35分)。这一结果表明,随着操作次数的增加,学员操作的流畅程度逐渐提高,动作逐渐熟练,该教学平台容易上手(图3A)。随着操作次数的增加,学员的Checklist评分得分逐渐升高,从第10次开始,操作得分趋于稳定。在30次操作后,Checklist平均得分为19.8分(满分20分),结果表明,随着操作次数的增加,学员完成操作步骤的准确度提高,每一个步骤完成得更加完整、到位(图3B)。
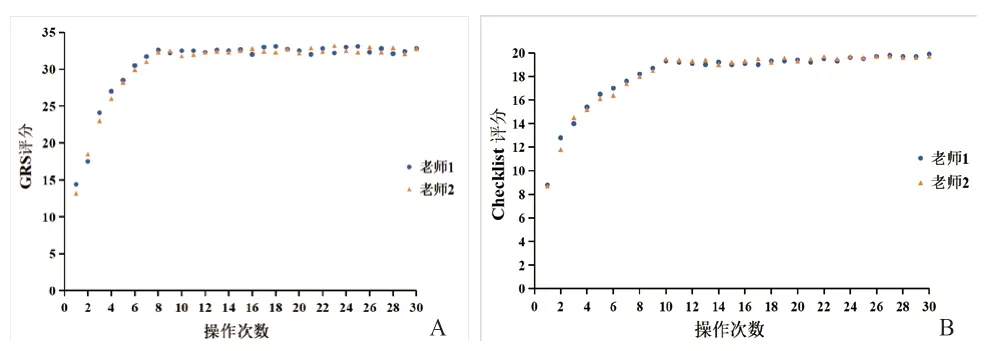
图3 学员每次操作的评分
2.4 问卷调查 向20名学员分别发放调查问卷。所有学员一致认为,未接受培训的初学者缺乏操作经验和信心,对针尖的定位方面缺乏把握,担忧发生穿破蛛网膜、损伤神经及血管等情况(图4A)。在该平台进行穿刺训练时,80%的学员认为运用力反馈设备进行消毒及硬膜外穿刺的临床代入感较强,50%的学员认为临床代入感一般,只有1名学员认为平台缺乏临床代入感(图4B)。多数学员认为,相较于传统教学模型,该平台有助于增强解剖结构的识别能力,操作过程中,特别强调了黄韧带的突破感。然而,30%的学员认为该平台操作设备昂贵、部分仿真效果欠佳(图4C)。总体来说,80%的学员对该平台的满意度较高(图4D)。

图4 调查问卷情况
3 讨论
近年来,在国内外教学改革实践中,将虚拟现实技术嵌入医学教育过程的创新型教学模式已经得到飞速发展。此外,力反馈技术的交互带来真实的触觉反馈,也为虚拟仿真教学提供了丰富的实现路径。在虚拟椎管教学的发展过程中,Matthias等[5]于2008年提出了一种虚拟系统用于腰椎穿刺训练。该系统的视觉组件显示了整个腰椎的3D视图及穿刺过程中针尖的不同位置,触觉组件提供穿刺过程的力反馈实现虚实结合操作。Kulcsar等[6]于2011年应用VR技术联合触觉装置设计出带有15档力反馈调节的虚拟硬膜外穿刺教学模型,使穿刺行径的触觉反馈更贴近真实。然而,这2个模型均未模拟出整个人体及穿刺场景,仅在硬膜外穿刺阶段提供触觉反馈,体验感较为薄弱。实际上,识别出穿刺过程中针尖所处的不同解剖层次对椎管内穿刺是至关重要的。因此,本研究进行了改进,采用标准人体数据进行腰椎模型的三维重建,模拟整个腰硬联合阻滞的过程,包括人体贴图及手术室环镜,并在操作结束后进行解剖教学。对于操作过程的力反馈设计,本研究邀请了20位经验丰富的麻醉医师进行各个层次的力反馈系数的调整、赋值,使触觉反馈更接近临床实际。
本研究对平台进行教学评估,发现学员的总穿刺时间在练习10次后趋于稳定,与Weil等[7]和邱晓晓等[8]的研究数据相比有所减少。分析可能原因是本虚拟平台采用标准化患者模型进行三维重建,椎管解剖较为典型,使得学员更易熟练掌握该项技能。关于整体操作流畅程度的GRS评分和关于具体操作步骤的Checklist评分是评估学员掌握操作技能的可靠方法[4]。本研究采用了上述2个评分系统来评估学员掌握操作技能的程度,其中GRS主要评估平台的易上手程度,Checklist进一步细分穿刺过程,着重评估学员完成操作步骤的准确程度。本研究结果表明,学员在训练8次后,操作流畅程度达到学习稳定期,训练10次后,操作步骤准确度趋于稳定,这与Friedman等[4]的研究结果相似。因此,可将操作的稳定点附近作为学习终点的参考,并设置合理的教学周期,在节约教学资源的同时,使虚拟装置得到充分的利用,保证教学效果。
调查问卷结果显示,该平台的沉浸感较强,增加了学员的黄韧带突破感体验,对提高学员的操作能力有所帮助。在传统椎管内穿刺过程中,穿刺针需要穿过棘上韧带、棘间韧带,并穿透黄韧带才能完成穿刺,这一突破感非常重要。由于初学者缺乏对各种触觉反馈的判断经验,无法准确调整针尖角度从而完成黄韧带的穿透,导致学习困难。本研究采用的力反馈技术恰好可以弥补这一不足,通过界面提示穿刺针水平面及矢状面的最大偏移角度,引导学员主动及时调整垂直穿刺角度,并可执行气泡压缩试验判断针尖位置,如此循环训练可提高学员对穿刺角度及针尖的判断力。但由于本研究重点在于体现不同解剖层次的力反馈,在铺巾、置管等步骤中仍存在需以动画替代的情况,期望在后续的研究中进一步改进。
本研究不足:首先,该模型是基于标准化患者的数据结构,而临床上还存在较多复杂病例,如脊柱侧弯、韧带钙化、椎管狭窄,需要后续增加虚拟病例库以完善该平台。其次,本研究纳入的培训对象为未经过教学的实习生,该平台是否对已有培训及临床经验的住院医师有帮助,还需对不同层次的人群进行培训了解教学效果。此外,学员反馈该平台在铺巾、置管等步骤的临床代入感一般,后续将采用虚实结合的教学方式,与标准化模型教具相辅助,弥补平台的不足,激发学员的积极性。
综上所述,基于虚拟现实联合触觉反馈技术的腰硬联合阻滞教学平台模拟了椎管内穿刺的整个操作过程,保障了操作的完整性和真实性,确保学员在一个无损伤、可重复的环境中提高其操作技能。该平台为学员提供了一个安全有效的学习环境,并为今后虚拟仿真教学的开展提供了更加可靠的参考数据。