鱼雷尾流自导+机动搜索弹道攻击方案构想
2023-07-31于雪泳武志东
于雪泳,武志东
(海军潜艇学院作战指挥系,山东 青岛 266199)
0 引言
随着鱼雷技术的发展,鱼雷战技性能越来越高,攻击手段越来越智能化,尾流自导+ 机动搜索弹道就是较为典型的一种。尾流自导+机动搜索弹道是指不使用鱼雷线导功能,末制导为尾流自导,在适当时机使鱼雷转入指定样式机动搜索的使用方式。这种机动搜索能较好地覆盖目标位置散布区域,弥补因运动要素不准等因素造成的尾流自导攻击失败[1]。
机动搜索方式可能包括环形搜索、螺旋搜索、折线搜索等样式,不同机动搜索弹道的作战使用方案不尽相同。本文选择尾流自导+环形机动搜索弹道样式作为研究对象,构想这种鱼雷弹道的使用时机、攻击策略和攻击参数设定或计算方法。
1 使用时机构想
新型鱼雷尾流自导+ 机动搜索弹道的使用时机,应考虑:1)尾流自导方式的使用时机;2)机动搜索弹道的使用时机。
1.1 尾流自导的使用时机
新型鱼雷一般具备线导功能,即发射后能够对鱼雷进行控制、引导,线导功能可大大降低潜艇对目标运动要素解算、攻击阵位、攻击机动的要求。所以,在没有特殊需求时,应首选线导功能。但是,在一些情况下,反而要放弃线导功能的便利,而采用“发射后不管”的自导方式,如:线导影响潜艇规避机动、线导影响后续武器使用、线导分散指挥员精力而影响指挥决策等情况下,就要果断放弃线导,而采用自导方式。
自导方式有声自导和尾流自导之分,当目标声信号较弱或具备声学干扰手段、目标尾流明显(目标为水面目标)、潜艇掌握一定的目标运动要素(含目标舷别已准确掌握)且海况允许的情况下,应选择使用尾流自导方式。
1.2 机动搜索弹道的使用时机
机动搜索弹道的使用,也不是一个必选项,而是需要指挥员根据战场情况决定是否使用。当潜艇对目标运动要素掌握比较准确时,可采用常规的鱼雷射击诸元计算方法,使鱼雷经过一次或二次转角后进入目标尾流,转入追踪弹道。当潜艇对目标位置掌握不准确时,对于潜艇而言,目标处于一定的区域范围之内,潜艇指挥员可利用鱼雷的机动搜索弹道功能,实施对目标位置散布区域的搜索。
1.3 尾流自导+机动搜索弹道的使用时机
由此,可将尾流自导+机动搜索弹道的使用时机总结为:
1)潜艇自行跟踪水面目标且对目标运动要素有了一定程度的掌握;
2)战场态势不便使用线导攻击,适宜使用尾流自导雷攻击;
3)目标运动要素没有收敛到满意的程度,鱼雷可能无法发现目标尾流。
2 攻击策略构想
当战场情况符合尾流自导+ 机动搜索弹道使用时机时,应果断实施攻击行动。
2.1 攻击策略
经研究论证,使用尾流自导+机动搜索弹道对目标实施攻击的策略为按照潜艇掌握的目标运动要素,计算尾流自导射击诸元,鱼雷首先按照尾流自导方式搜索目标尾流,在预计鱼雷穿过且未发现目标尾流时,按机动搜索弹道参数确定的搜索样式实施搜索。
2.2 策略原理
先使用尾流自导方式对目标实施攻击的原理:1)尾流自导是鱼雷自导的重要方式之一,其技术已经比较成熟,只要有一定的捕获目标尾流的概率时,就不能轻易放弃;2)潜艇已经掌握了一定的目标运动要素,虽然未达到满意程度,但基本满足尾流自导鱼雷发射要求;3)虽然不能确保尾流自导攻击一定成功,但不能排除成功的可能性,尝试一下总比直接放弃好。
预计鱼雷穿过且未发现目标尾流时进行机动搜索的原理:1)鱼雷穿过且未发现目标尾流时,若无其他措施,此次鱼雷攻击即宣告失败;2)利用鱼雷的机动搜索功能,可以在尾流自导攻击失败后,再次进行目标搜索,提高发现概率;3)在鱼雷穿过且未发现目标尾流的情况下,再实施机动搜索,可充分发挥前段尾流自导的作战效能。
2.3 策略方案
关于使用尾流自导的策略方案,已有诸多文献论述,非本文重点。
现重点论述使用机动搜索弹道的策略方案,该方案可概括为:精准把握开始时机、科学计算目标位置域、合理确定机动搜索方向。
2.3.1 关于机动搜索开始时机
机动搜索开始时机可确定为:鱼雷第一次穿过且未捕获目标尾流时刻T0。若鱼雷捕获目标尾流,则机动搜索弹道不执行;若未捕获目标尾流,将第一次穿过目标尾流时刻,即T0 时刻,作为执行机动搜索弹道的开始时刻。
2.3.2 关于目标位置域的计算
采用潜艇获得的某时刻(认为目标运动要素满意的时刻)目标运动要素,通过数学计算,目标位置散布概率密度可表示为二维正态分布函数:
式中,Δx,Δy 为目标实际位置与目标位置推算点的差异量;r 为相关系数;σ1为x 轴方向标准差;σ2为y 轴方向标准差[2-3]。
取a=2σ1,b=2σ2,以a,b 为长短半轴,以目标位置最或然点为中心,形成目标位置散布椭圆区域。
2.3.3 关于机动搜索方向
鱼雷从T0 时刻开始,以T0 时刻鱼雷位置点与目标位置最或然点的距离为半径,实施旋回搜索。当攻敌左舷时,鱼雷采用左旋回方式搜索一周,如下页图1 所示;当攻敌右舷时,鱼雷采用右旋回方式搜索一周,如图2 所示。

图1 尾流+机动搜索弹道攻敌左舷构想图Fig.1 Conception diagram of wake and maneuvering search trajectory to attack the enemy's left port

图2 尾流+机动搜索弹道攻敌右舷构想图Fig.2 Conception diagram of wake and maneuvering search trajectory to attack the enemy's starboard
由于鱼雷穿过目标尾流之后再进行旋回搜索,而不是航行至目标位置散布区域圆相切的位置开始旋回搜索,所以,鱼雷旋回搜索区域与目标位置散布区域有一定出入,这在一定程度上降低了机动搜索弹道搜索的效率。这种损失是由于利用了鱼雷尾流自导功能带来的。尾流自导+机动搜索弹道使用中,尾流自导是为主的,机动搜索弹道是为辅的,所以,首先进行尾流搜索,再进行旋回搜索,是必要的科学的。可以看出,当尾流自导雷进入目标尾流角较大时,机动搜索弹道的搜索效率会相应提高。
3 攻击参数设定或计算方法构想
鱼雷攻击参数包括尾流自导参数和机动搜索弹道参数,尾流自导参数设定或计算方法,为传统的鱼雷攻击理论,见诸于多种文献,本文不作论述。机动搜索弹道攻击参数,包括开始机动搜索航程、机动搜索航深、航速、自导方式、旋回半径、旋回方向、旋回结束后航向等,现分别阐述其设定或计算方法构想。
3.1 开始机动搜索航程
开始机动搜索航程是指鱼雷从发射出管开始,航行至第一次出尾流时刻所经历的航程,是控制鱼雷开始机动搜索的参数。这个参数的计算,需要用到鱼雷尾流自导射击参数中的鱼雷航程(即鱼雷从发射到交汇目标航迹线所航经距离Sl)和命中角(即进入尾流角θ),以及目标尾流宽度(即鱼雷第一次进入尾流处的尾流宽度W),由鱼雷开始执行机动搜索的时机可知,开始机动搜索航程Sj 可表达为:
3.2 机动搜索航深
因攻击目标为水面目标,考虑到开始机动搜索弹道之后的航段,鱼雷进行的是声自导搜索。所以,机动搜索航深需要适合目标情况及海区情况,利于声自导发现目标。
3.3 机动搜索航速与自导方式
机动搜索航速宜采用高速,机动搜索自导方式宜采用主动声。理由是:主动声方式受目标规避机动措施影响较小,高速对主动声自导影响不很明显。从攻击构想图上可以看出,机动搜索旋回范围比较大,若鱼雷速度偏低,则旋回搜索的时间必然加长,目标位置扩展将更为发散。
3.4 机动搜索旋回半径
按攻击策略构想,鱼雷旋回搜索半径应为鱼雷开始旋回点到目标位置最或然点的距离,如图3 所示,鱼雷在目标尾部距离为CM 的位置进入目标尾流,穿过尾流后,若未发现目标尾流,即进入旋回搜索阶段,旋回搜索开始点必然在鱼雷进入尾流的另一侧,具体离开目标尾流中心线为多少时,开始旋回搜索最有利呢?应考虑到如下几个因素:一是有足够的距离使尾流自导确定离开目标尾流且确定没有发现尾流;二是不能距离太大,若距离太大,则将使目标位置散布更大,旋回搜索范围与目标散布范围的重合度更低。所以,这个距离(用CB 表示)可以考虑取50 m~70 m 为宜。因此,机动搜索旋回半径可表达为:
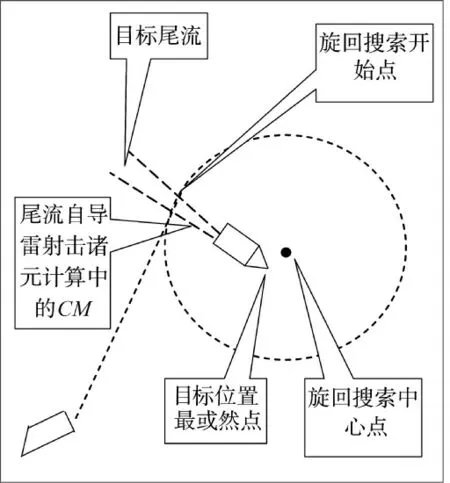
图3 机动搜索旋回半径计算示意图Fig.3 Schematic diagram of calculation of maneuvering search cycle radius
3.5 机动搜索旋回方向
尾流自导方式攻击目标时,目标舷别是一个重要的攻击参数,是必须准确掌握的。所以,尾流自导鱼雷进入目标尾流时的舷别态势是已知的明确的。由此,机动搜索旋回方向应为:若鱼雷从目标左舷首次进入尾流时,采用左旋回方向,即逆时针方向(俯视);若鱼雷从目标右舷首次进入尾流时,采用右旋回方向,即顺时针方向(俯视)。
3.6 旋回结束后航向
旋回结束后航向是在鱼雷旋回搜索一周后仍未发现目标的情况下,继续搜索的航行。确定旋回结束后航向的原则是:在现有信息的基础上,使鱼雷与目标位置最或然点相遇。
鱼雷进入目标尾流时(鱼雷到达C 点时,C 点为线段CM 的端点),目标位置最或然点为M 点(线段CM 的另一端点);鱼雷穿过尾流到达B 点且未发现目标尾流时,开始以O 为圆心进行圆周搜索;搜索一周回到B 点后仍未发现目标时,目标位置最或然点位于P 点;鱼雷开始进行与目标的相遇机动,预期相遇点为Q 点,BQ 即为旋回结束后航向。在这个相遇过程中,设定相遇时间为t,在ΔCBQ 中,CQ=CM+2πr/Vl×Vd+Vd×t,BQ=Vl×t,∠BCQ=180-θ,其中,r 为再规划半径,Vl 为鱼雷速度,Vd 为目标速度,θ 为尾流自导射击诸元计算参数中的命中角(尾流进入角),利用余弦定理,BQ2=CB2+CQ2+2·CB·CQ·cosθ,即可得t 的值,利用正弦定理,可得∠BQC的值,目标航向与∠BQC 进行加减计算,可得BQ 的方向,如图4 所示。
4 结论
现代作战条件下,鱼雷虽以线导方式攻击为主,但是在一些情况下仍有使用自导方式攻击的必要性。尾流自导+机动搜索方式,就是特殊条件下潜艇指挥员可采取的选项之一。本文论述的策略方法,在作战中,有的可以直接被采用,有的因为涉及复杂计算难以在情况紧迫的局面下得到运用。虽然如此,其仍有一定的应用价值,比如按此方法所提供的思路,进行概略计算或绘算;再如在指控系统建设中嵌入该方法。这都是该理论研究所期望的效果和作用。
