智能反射面辅助的UAV 通信中优化用户和速率方法*
2023-07-31王自力
郑 鑫,王自力
(1.黄淮学院计算机与人工智能学院,河南 驻马店 463000;2.驻马店职业技术学院,河南 驻马店 463000)
0 引言
因机动性好,易部署,基于UAV 的通信网络被广泛应用[1-2],如基于UAV 的森林防火巡视系统,基于UAV 的应急救援等。多数应用需将UAV 作为空中移动基站(base stations,BS)[3-4]。地面用户(ground user,GU)通过UAV 接入蜂窝移动网络,进而提高地面用户的速率。
智能反射面(intelligent reflecting surface,IRS)是提高UAV 与GU 间通信质量的有效技术。IRS 是一种由大量低成本的被动无源反射元件组成的平面,放置在发送方与接收方之间。由于每个元件能够独立地调整入射信号相位,能够使接收方更好地接收信号。因此,IRS 在基于UAV 的无线网络(IRS-UAV)中广泛使用[5-6]。
将IRS 融入UAV 系统,可提高UAV 与地面用户间通信链路受阻问题。研究者已对IRS-UAV 的无线网络进行较深入研究。在基于UAV 的无线网络中,通常将IRS 安装于UAV 上或者建筑物墙上[7-10]。文献[7]讨论了将IRS 安装于UAV 的网络能效问题;文献[8-10]针对IRS 安装于建筑物墙的环境,讨论如何通过优化UAV 的轨迹和传输功率,最大化和速率。文献[11]通过联合优化IRS 相移和UAV的移动轨迹,提升用户和速率。文献[12]针对UAV作为空中边缘计算服务器的应用场景,利用IRS 辅助UAV 接收信号,降低系统能耗。这些研究工作并没有考虑到回程链路的容量问题。即在面向多载波UAV-IRS 的无线网络中,如何在满足回程链路容量约束条件下,最大化用户的和速率。本文对该问题进行研究,优化用户和速率方法(sum rate of users optimization,SRUO)。SRUO 通过引用IRS 技术,并优化IRS 相移、UAV 位置和子信道分配,进而分析它们对和速率的影响。
1 系统模型
K 个GUs 分布于多载波UAV-IRS 的无线网络,它们形成GU 集:。每个GU 具有固定的位置,即,。假定UAV 的高度为H,水平位置为。UAV 作为空中基站,其通过蜂窝基站接入核心网络。假定蜂窝基站的水平位置坐标为,高度为Hb。
假定一个IRS 附在一个墙面上,墙面的高度为Hi,水平面坐标为,如图1 所示。每个IRS由个无源反射元组成。反射元的间距为d。用Φ 表示IRS 的相移矩阵:
1.1 子信道分配
假定共有C 个子信道用于无线接入和回程链路接入,采用正交频分多址接入技术[13]。C 个子信道形成子信道集,每个子信道带宽为W Hz。
为了确认每个用户能正常通信,每个GU 必须被分配到一个子信道,即。同时,每个子信道只能分配到一个链路,这就使得子信道c 满足式(2)的约束条件:
1.2 信道模型
蜂窝基站与UAV 间、UAV 与IRS 间和UAV 与GU 间的通信链路为视距传播,而IRS 与GUs 间通信信道经历Rayleigh 信道[14]衰落。它们间的欧式距离如式(3)所示:
依据文献[8],GUk端从UAV 所接收的信号yk[8]:
式中,p 表示UAV 向GUk的传输功率。假定UAV 向每个GU 的传输功率都相同,因此,,其中,Pmax表示UAV 总的传输功率;nG表示在GU 端的高斯白噪声,其服从零均值,方差为σ2的正态分布。

图2 UAV,GUk 和IRS 间空间关系Fig.2 Spatial relationship among UAV,GUk and IRS
式中,β0表示参考距离为1 m 的信道增益。
2 问题描述
本文主旨在通过优化IRS 的相移、UAV 的位置和子信道分配,提高GUs 和速率。GUk在子信道c(UAV 至GUk信道)上所获取的速率:
此外,在子信道c 上回程链路上可获取的速率[15]:
式中,p0表示蜂窝基站的发射功率。
为了维持端到端的性能,从UAV 至GUs 间所有链路上的总速率应不大于回程速率。因此,应满足约束条件:
约束项:
由于约束项(14)是非凸的和式(15)中存在整数变量,式(11)的问题是非凸混合整数非线性优化(MINLP)问题[16]。
3 问题的求解
为了求解问题P,先推导相移的闭合解,然后再通过迭代求解子信道分配和UAV 位置。令CA和CB分别表示分配至UAV 至GU 间链路和回程链路的子信道集,即。最初,在集CA内的元素数等于GUs 的用户数,进而保证每个用户至少被分配到一个子信道。剩余的子信道纳入到CB。然后,在满足约束条件下,优化IRS 的相移和UAV 位置的同时,更新CA和CB集。接下来,阐述求解问题P 的具体过程。
将此IRS 相移代入到问题P,问题P 仍是非凸MINLP 问题。为此,对问题P 进行分解求解。
3.1 最优的子信道分配(ψ)
对于给定的Φ 和Q,可将求解子信道分配问题形成子问题P1:
约束项:
因此,子问题P1 是标准的混合整数规划问题(MILP),其能通过CVX-Mosek 工具[17]进行求解。
3.2 最优的UAV 位置(Q)
对于给定的Φ 和ψ,可将求解最优UAV 位置问题形成子问题P2。由于此问题为非凸问题,需引入一些辅助变量,再利用连续凸逼近(successive convex approximation,SCA)算法进行处理。具体而言,引入变量,和结合式(9)和式(10)可得:
3.2.1 基于一阶Taylor 扩展的速率下限和上限
最后,将获取UAV 最优位置问题转化成问题P2:
约束项:
P2 问题为凸问题,其可通过CVX-Mosek 工具进行求解。
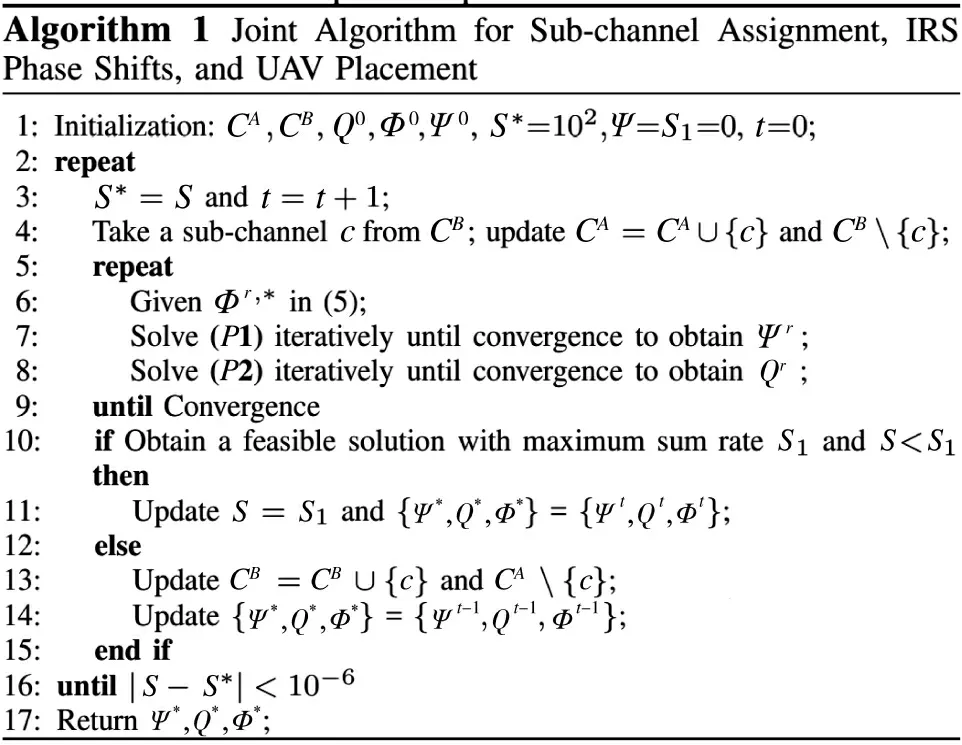
3.2.2 求解问题P 过程
求解问题P 的过程如算法1 所示。先初始化参数:CA,CB,Q0,ψ0,S*=102,S=S1=0,t=0;其中,S*表示目标速率;S1表示每个可行解所计算的和速率,即每次迭代计算所计算的和速率;S 表示在迭代过程中的中间变量;t 表示迭代次数的索引号。
在每次迭代时,先从CB中找一个子信道c,纳入CA,并对CA和CB进行更新,如Step 4 所示。Step 5至Step 9 给出了求解问题P 的迭代过程。具体而言,先利用式(17)估算最优IRS 相移,再通过迭代分别求解问题P1 和P2,进而获取ψγ和Qγ。
Step 10~Step 15 给出求解可行解的过程。如果计算的最大和速率大于上次迭代的速率,就进一步更新S,并更新最优解。否则,就重新从CB中找一个子信道c,纳入CA。重复上述过程,直到所收敛的和速率与目标速率之差小于10-6,即收敛的和速率逼近于目标速率。最后,通过算法1 得到最优的。
?
4 性能分析
4.1 仿真参数
利用MATLAB 软件建立仿真平台。考虑方形网络区域,且网络尺寸为1 000 m×1 000 m。UAV 的高度为120 m;蜂窝基站的位置为(0,0,20)m。具体的仿真参数如表1 所示。此外,GUs 分布在半径为200 m 的圆形区域,。最初,UAV 位于该区域中心。

表1 仿真参数Table1 Simulation parameters
4.2 数据分析
本节着重分析IRS 技术和UAV 位置对GUs 和速率的影响。为此,在仿真中考虑未采用IRS 技术的场景,其标记为without IRS。同时,针对UAV 位置考虑将UAV 位置固定在区中心的场景,而本文提出的算法不是将UAV 位置固定在区中心,只是初始位置在区中心,然后通过优化迭代UAV 位置。将前者记为UAV-中心,后者记为UAV-优化。因此,存在4种情况:UAV- 中心with IRS;UAV- 中心without IRS;UAV-优化with IRS;UAV-优化without IRS。
分析GUs 数对和速率的影响。图3 给出和速率随GUs 数的变化情况,其中,GUs 数从12~28 变化,,C=60。

图3 GUs 数对和速率的影响Fig.3 Impact of number of GUs on sum rate
从图3 可知,GUs 数对和速率影响较小。在GUs数从12 变化至28 过程,和速率增长缓慢。此外,观察图3 可知,采用IRS 技术可以有效提高和速率。UAV- 优化with IRS 和速率比UAV- 优化without IRS 和速率平均提高近20%。同时,观察图3 可知,UAV 的位置对和速率有重要影响。UAV-优化的和速率优化UAV-中心的和速率。
接下来,分析子信道数对和速率的影响,如图4所示,其中,子信道数从50~90 变化,GUs 数为20,。从图4 可知,子信道数对和速率有重要影响。和速率随子信道数呈线性增长。原因在于:子信道数越多,可优化的空间越高。同时,观察图4 可知,在变化子信道数环境下,IRS 对和速率的提高有积极作用。

图4 子信道数对和速率的影响Fig.4 Impact of number of sub-channels on sum rate
分析IRS 元件数对和速率的影响,如图5 所示,其中,IRS 元件数从16~144 变化,GUs 数为20,C=60。从图可知,IRS 元件数增加,有利于提高和速率。原因在于:IRS 元件数越多,反射至GUs 的信号越多,提升了信号质量。侧面说明,本文研究IRS 对和速率影响的意义。
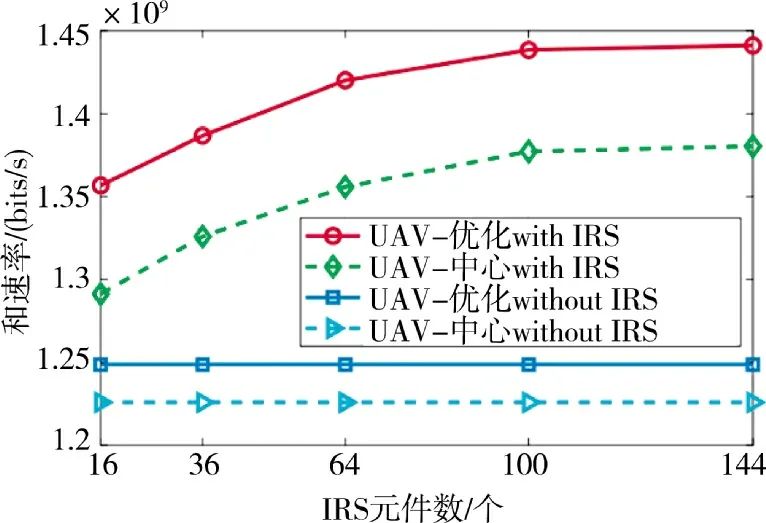
图5 IRS 数和速率的影响Fig.5 Impact of number of IRS on sum rate
5 结论
为了提高IRS 辅助的UAV 系统的和速率,分析了IRS 相移、UAV 位置和子信道分配对和速率的影响,并将和速率问题构成MINLP 问题,再利用SCA 算法求解。通过仿真分析,证实了所提出方法的和速率的性能。本文只考虑了单UAV 场景。将分析基于IRS 辅助的UAV 群的通信场景,进一步优化方法,这将是后期的研究工作。
