面向移动物联网环境的基于多路由指标的RPL改进路由*
2023-07-31于童
于 童
(永城职业学院电子信息工程系,河南 永城 476600)
0 引言
随着微控制器以及传感技术的发展,物联网(internet of things,IoT)[1-2]已在智能交通、智慧农业、康复医疗等领域广泛应用。预期到2025 年,在物联网平台平均每人拥有不止一个智能设备。这些智能设备可能是静态的,也可能是移动的。
然而,既有静态又有移动的智能设备组成的物联网通信可靠性和设备能耗面临着较大的挑战。由IETF 标准化的低功率低损耗网络路由协议(routing protocol for low power and lossy network,RPL)是面向静态物联网[2-5]。移动设备的加入,降低了RPL 路由的稳定性。因此,若将传统的RPL 路由直接应用到移动物联网应用环境,路由可靠性以及数据包传递率得不到保证。
为此,研究者对传统的RPL 路由进行改进,使其更适用于移动环境。例如,文献[6]提出基于接收信号强度(received signal strength index,RSSI)的改进RPL 路由。该路由引用移动检测机制,进而提高设备的能效。类似地,文献[7]采用了定位算法,估计移动节点的位置,进而调整路由,提高了路由的可靠性。文献[8]采用增强学习算法估计链路的有效时间,使其适用于移动环境,提高了路由的可靠性。
然而,这些改进路由只采用单一路由指标构建目标函数。由单一路由指标所选择的最优路径无法满足物联网的多类应用需求。此外,由移动和静态设备组成的物联网,对路由的稳定性提出了更高的要求。
为此,提出基于多路由指标的RPL 改进路由MRPL。MRPL 路由先从节点剩余能量以及链路持续时间两方面计算路由指标,再引用熵值法设定路由指标的权重系数。本文的主要工作如下:1)提出剩余能量因子、链路持续时间和链路稳定性3 个路由指标,并对它们进行归一化处理,它们均是0~1 间的参数;2)利用上述3 个路由指标构建复合的目标函数;3)采用熵值法设定复合目标函数中3 个路由指标的权重值;4)仿真结果表明,提出的MRPL 算法增强了路由稳定性,提高了数据包传递率。
1 RPL 概述及存在问题
RPL 属距离矢量路由协议[9-10]。在基于RPL 的物联网架构中,网络内的节点呈树状型结构。每棵树至少存在一个sink 节点,其作为树的根节点。这些节点构成一个有向无环路(directed acyclic graph,DAG)。通常将只含有一个sink 的DAG 称为定向DAG(DODAG)。
利用目标函数(object function,OF),构建并更新DODAG。OF 通过路由指标构建DODAG 内节点间的路径。一般依据物联网应用要求定义路由指标,如节点的能耗、传输数据包的可靠性,路由的稳定性。依据OF 选择偏好的父节点(简称偏好父节点)作为下一跳节点,进而将数据包传输至根节点。此外,DODAG 中的每个节点依据离根节点的近似距离设置节点的秩值(Rank)。
RPL 路由阶段有四类控制消息:1)DODAG 信息对象(DIO)。节点通过邻居分发DIO 消息,获取网络参数;2)DODAG 信息征集(DIS)。通过传输DIS,实现向RPL 节点请求DIO 消息;3)目标广播对象(DAO)。通过传输DAO,建立上行路由;4)DAO-确认(DAO-ACK)。通过传输DAO-ACK,告知DAO 消息发送节点已收到DAO 消息。
传统的RPL 路由只考虑单一路由指标,这无法满足物联网各类应用要求。特别是在移动应用环境中,若只考虑期望传输次数(ETX)指标[11],所构建路由无法满足应用对数据包传递率的要求。
为此,本文针对移动环境,选择链路质量、链路稳定性以及节点能耗构建复合目标函数。即采用多路由指标,综合估计父节点,使所选择的最佳父节点所构建的路由能够有效地传输数据包,进而提高应对移动环境的强健性。
2 MRPL 路由
2.1 路由指标
本文采用3 个路由指标:剩余能量因子、链路持续时间和链路的稳定性。
假定节点sj携带数据包,其需要从候选父节点中选择一个节点作为下一跳节点,即选择最佳父节点。令Nj表示节点sj的候选父节点集。
2.1.1 候选父节点的剩余能量因子
计算候选父节点的剩余能量因子,其考虑父节点的能量变化速度。在计算候选父节点的剩余能量因子时,考虑两种情况:1)候选父节点为BR;2)候选父节点不是BR。
当候选父节点为BR 时,直接利用候选父节点的能量变化速度作为其剩余能量因子:
若候选父节点不是BR 时,就考虑候选父节点的偏好父节点的剩余能量因子。在这种情况下,候选父节点的剩余能量因子的定义如式(2)所示:
2.1.2 链路持续时间
链路持续时间等于链路两端节点在彼此通信范围内的持续时间。引用链路持续时间,可提高链路稳定性。
以图1 为例,阐述计算链路持续时间的可能性。节点A 向其邻居节点(C,D,E,B)广播DIO 消息,其包含节点A 的移动速度和当前的位置。邻居节点接收后,结合自己的位置和移动速度便可计算与节点A 间链路的持续时间。若节点速度为零,则表示节点为静态节点。例如,节点C 的移动速度为零,其属静态节点。
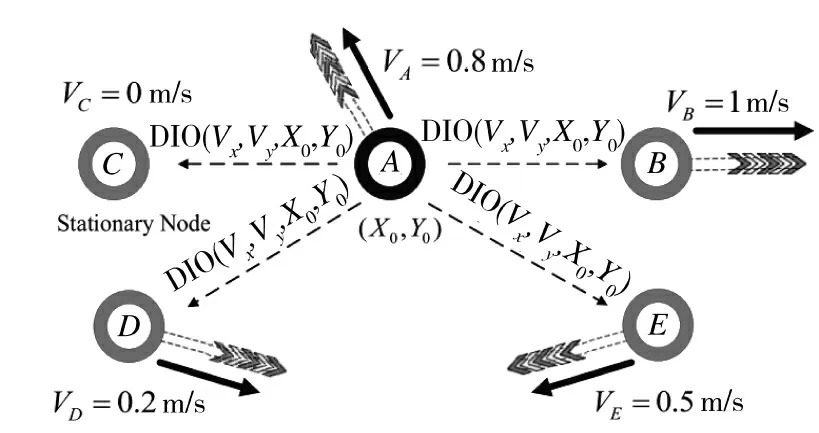
图1 基于DIO 消息计算链路可持续时间Fig.1 Calculating the duration of link based on DIO information
基于上述讨论,节点sj可计算其与候选父节点间链路的持续时间。令(xj,yj)表示节点sj的位置;令ϑj表示节点sj的移动速度。节点sj将包含(xj,yj)和ϑj信息的DIO 消息向候选父节点广播,候选父节点接收后,就计算离节点sj的相对距离:
由于节点移动,在经时间t 后,可用式(4)更新节点的位置:
令Tj,i表示节点sj与候选父节点si间链路的可持续时间;令R 表示节点的最大通信范围。用R 替换式(3)中,用Tj,i替换式(4)中t,可构建等式(5):
通常,节点的最大通信范围是固定的,即R 已知。因此,通过求解式(5)可估算链路持续时间。考虑到,对链路持续时间进行归一化:其中,表示期望的链路持续时间。
2.1.3 路由稳定性因子
Tj,i只反映了节点sj与候选父节点si间的一跳链路的持续时间,并没有考虑了si与它的候选父节点的间链路的稳定性。令Ti,p表示节点si与它的偏好父节点间链路持续时间。若Tj,i与Ti,p越相近,则由节点si作为下一跳节点所构建的路由越稳定。因此,将路由稳定性(RSE)定义为式(6):
2.2 复合目标函数的构建
节点sj有n=个候选父节点。令rik表示第i个候选父节点的第k 个路由指标,其中,i=1,2,…,n,k=1,2,…,m。本文考虑了3 个路由指标,则m=3。用样本空间表示每个候选父节点的路由指标,则形成矩阵Θ:
用G(i)表示考量第i 个候选父节点是否为最佳父节点的评估值:
因此,可构建如式(9)所示的复合目标函数OF:
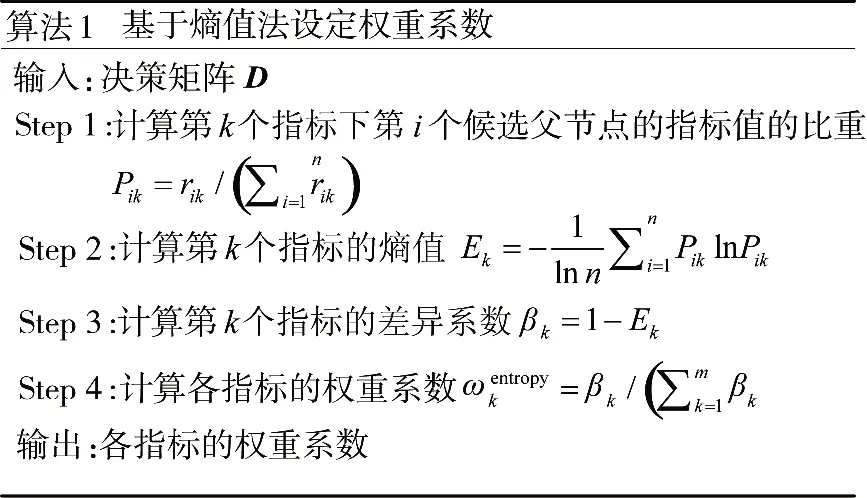
2.3 基于熵值法设定权重系数
作为客观赋值法的一种,熵值法通过获取指标变化的信息熵值而设定指标的权重值[12],其赋值原则:给信息熵小的指标赋予较大的权重,给信息熵大的指标赋予小的权重。
算法1 给出基于熵值法估算权重系数的过程。先设定决策矩阵D,用于解决n 个方案、m 个属性的多属性决策问题。将矩阵Θ 赋予D。这作为算法1 的输入,输出为各指标的权重系数。
?
将算法1 输出的指标权重值代入式(9),生成最终的:
最终根据式(10),选择具有最小OFcom的候选父节点作为最佳父节点。图2 给出产生最佳父节点的主要过程。

图2 产生最佳父节点的主要过程Fig.2 Main process of generating the optimal parent node
3 性能分析
3.1 仿真环境
采用硬件开发平台Zolertia Z1 和仿真软件Cooja 建立仿真平台。引用CC2420 射频模式建立无线通信[13]。Z1 的主板为MSP430 微处理器。在区域内部署一个sink 和多个静态节点和多个移动节点,其中,sink 位于区域的左顶点。考虑两个仿真场景(Case one 和Case two),具体的仿真参数如表1 所示。
Case one 与Case two 的主要差别:静态节点和移动节点所占的比例不同。在Case one 中:移动节点和静态节点各占50%,总的节点数从20~40 变化;节点传输数据间隔(TI)服从[30 s,60 s,90 s,120 s]区间的随机分布;在Case two 中:固定节点数为12 个,移动节点数从20~40 变化;所有节点采用相同的TI。
此外,为了更好地分析MRPL 路由性能,选择传统的RPL 路由(ORPL)和文献[14]提出的基于移动感知的RPL 路由(MA-RPL)。MA-RPL 路由引用了ETX 和RSSI 路由指标构建目标函数。
3.2 数据包传递率
分析Case one 中的数据包传递率。图3 给出了MRPL 路由、ORPL 路由和MA-RPL 路由的数据包传递率,其中,图3(a)中节点数为20 个,图3(b)中节点数为40 个。考虑了两个移动模型:Random Walk 和Manhattan。

图3 数据包传递率(case one)Fig.3 Delivery rate of data package(case one)
对比图3(a)和图3(b),网络内节点数的增加对数据包传递率的影响较小。原因在于:固定节点和移动节点的比例相同。此外,从图3 可知,相比于Manhattan 模型,移动节点采用Random Walk 模型下的数据包传递率更高。
相比于ORPL 和MA-RPL 路由,MRPL 路由提高了数据包传递率。原因在于:MRPL 路由在构建路由时,考虑到节点移动问题。目标函数关联到路由的稳定性以及节点能效,提高了路由的稳定性。而ORPL 和MA-RPL 路由没有考虑到节点移动特性,所构建的路由不稳定,降低了数据包传递率。
下页图4 显示ORPL 路由,MA-RPL 路由和MRPL 路由在Case two 中的数据包传递率。

图4 数据包传递率(case two)Fig.4 Delivery rate of data package(case two)
从图4 可知,相比于ORPL 和ML-RPL 路由,MRPL 路由提高数据包传递率。在所有情况中,比ORPL 和ML-RPL 路由,MRPL 路由的数据包传递率最低也分别提高了16%和15%,最高分别提高了约64%和58%。
MRPL 路由在构建目标函数时,考虑了链路的持续时间以及稳定性,并避免选择剩余能量低的候选父节点作为最佳父节点,提高了路由的稳定性。而ORPL 路由和MA-RPL 路由考虑了期望传输跳数ETX,接收信号强度RSSI 和欧式距离3 个路由指标。这些路由指标并没有考虑到节点的移动性,无法在节点移动环境中建立稳定路由。
3.3 控制包开销率
控制包开销率是衡量路由性能的重要指标。在构建路由时,控制包数越多,节点获取更多的网络拓扑信息,提升路由的稳定性,但也增加了节点能量消耗。
图5 给出了Case one 场景下控制包开销率。从图可知,MRPL 路由的控制包开销率分别比ORPL路由和MA-RPL 路由提升了约21%和30%。原因在于:MRPL 路由需要发送额外的DIO 消息,进而使移动节点能够快速地识别周围的静态节点,从而构建稳定的路由。

图5 控制包开销率(case one)Fig.5 Control packet overhead rate(case one)
图6 显示了ORPL 路由,MA-RPL 路由和MRPL 路由在Case two 中的控制包开销率。与Case one情况类似,在Case two 场景下,MRPL 路由的控制包开销率仍高于ORPL 路由和MA-RPL 路由。但是,从图3 和图4 可知,MRPL 路由具有高的数据包传递率。换而言之,MRPL 路由以增加控制包开销换取高的数据包传递率。

图6 控制包开销率(case two)Fig.6 Control packet overhead rate(case two)
4 结论
针对传统RPL 以及相关改进路由在移动物联网环境中的数据包传递率低的问题,提出多路由指标的改进路由MRPL。MRPL 路由采用多个路由指标,综合地评估候选父节点,使所选择的下一跳节点能够维持更长的链路连通时间。性能分析表明,相比于传统的RPL,MRPL 路由提升了数据包传递率。
在后续研究中,将考虑6G 网络与RPL 的结合,进一步提升网络性能,这将是后期的研究工作。
