丘陵山区果园通用升降作业平台研制与试验
2023-07-30丁小兵李亚丽刘良豪曹中华王圆明湛小梅
丁小兵 李亚丽 刘良豪 曹中华 王圆明 湛小梅
摘 要 机械化是降低水果生产成本、减少从业人员工作量、提高果园种植收益、提高果农种植积极性的最有效手段。在分析国内外果园升降作业平台研究现状及丘陵果园种植模式基础上,设计了一款丘陵山区果园通用升降作业平台,确定了果园通用升降作业平台的需求、结构和基本参数,进行了升降平台液压底盘、升降机构、调平机构的设计,通过关键受力部件如行走底盘、折叠梁框架等的有限元分析确定设计合理性,集成修剪、施药、采摘、运输等功能,并进行了样机试验,证实研究的果园多功能升降作业平台可升降高度≥1.5 m、承载最大重量≥1 t,满足丘陵山区使用要求;调平功能提高了操作的安全性,升降功能提高了作业的便利性。
关键词 果园;升降作业平台;结构组成;工作原理;样机试验;丘陵山区
中图分类号:S22 文献标志码:A DOI:10.19415/j.cnki.1673-890x.2023.09.061
我国是世界水果生产第一大国,2020年果园面积达1 264.63万hm2,水果产量达27 400万t,较2019年分别增长3.01%、4.71%[1]。重庆市水果产业发展较快,2020年全市果园面积为34.78万hm2,其中柑橘22.36万hm2;2020年水果产量514.8万t,其中柑橘产量319.9万t[2]。随着我国全面进入小康社会,人民生活水平日益提高,人们对新鲜果品的消费需求日益强烈。如何更好地丰富群众的“果盘子”,成为一门重要的课题。
水果种植是高成本、大用工产业,其生产成本连年上涨。以柑橘为例,2020年重庆生产成本达3 841.95元/667 m2,其中人工成本1 724.73元/667 m2[3],占总成本的44.9%,耗费了大量物质和人工成本。成本居高不下导致水果种植效益较低,农民积极性不高;用工量大导致生产季节农业工人严重缺乏,难以扩大规模。机械化是提高果园种植收益、降低作业人员劳动强度、提高果农种植积极性、守护好人民群众“果盘子”的最为有效的手段。
1 国内外研究现状
1.1 农业机械底盘
现有的农业机械底盘大多为传统的机械式底盘,传動可靠、制造容易,但机械零件复杂笨重,一般不能进行无级调速。而静液压驱动底盘实现了轻量化,可无级变速减少顿挫,变速范围更大,转向更加轻盈,安全性和舒适性更高[4]。如今,全液压底盘驱动方案已在植保机械、收获机械上得到大范围应用[5],但在其他机械上应用不多,本研究探索全液压底盘用于果园管理机。
1.2 果园多功能管理平台
20世纪初期,欧美等西方发达国家就开始研究高空升降作业车,发展到现在已经形成比较成熟的系列产品[6-9]。我国果园作业平台研究起步较晚,进展也比较缓慢。2000年国产电动升降平台研制成功[10],标志着我国特色林果业机械装备有了较大的发展。近年来,多功能升降管理平台新产品大量涌现,但目前欧美管理平台只适宜大规模果园,日韩产品售价较高;国产果园管理作业平台还存在着噪声大、人机结合性较差、功能单一、机具操作笨重等缺点,且稳定性和安全性还有待进一步提高[11-12]。
2 丘陵果园果树种植模式
为探明丘陵山区果园种植特点及几何参数,作者走访了重庆市内多个果园,得出以下参数:重庆市标准化果园一般依山而建,并根据地形情况进行了一定的宜机化改造,如陡坡改缓坡或梯田。平地或缓坡地带2~3行或20 m宽开50 cm深沟排水,主要作物种植模式如下。柑橘种植行株距大多为5 m×3 m,也有4 m×3 m,树高一般控制在2~3 m,成年树树冠直径为2.5~2.8 m。葡萄一般根据架势定,行株距为3 m×2 m,高度一般控制在1.8 m。枇杷常规行株距为4 m×3 m,如要机械化,行株距为5 m×3 m,高度一般控制在2~2.5 m。梨机械化种植行株距大多为5 m×3 m,也有4 m×3 m,树高一般控制在2.5~3 m,成年树树冠直径为3~4 m。
3 果园通用升降作业平台结构组成及工作原理
3.1 结构组成
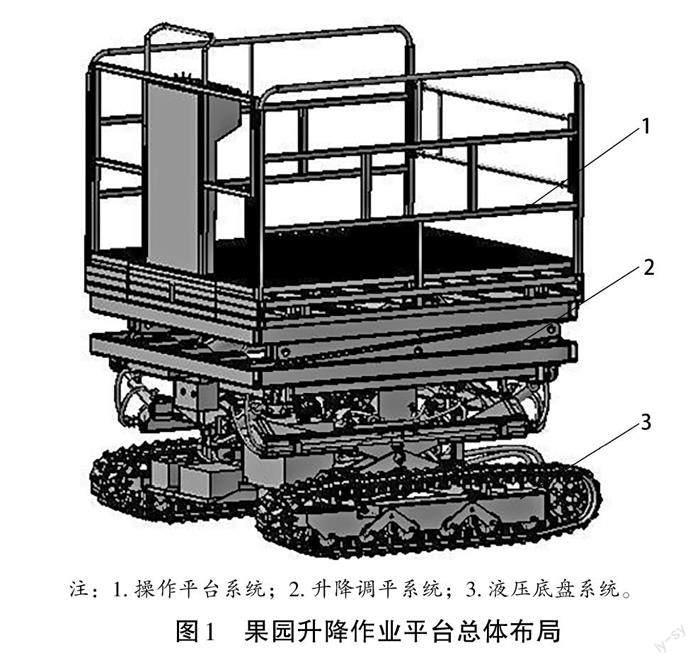
升降平台由液压底盘系统、升降调平系统、操作平台系统三大部分组成。液压底盘系统主要搭载动力、电瓶、液压控制元件和履带行走轮系等,负责提供整机动力传输和自行走功能。升降调平系统主要由上中下三层框架、剪叉升降臂、调平油缸、升降油缸、启动总开关和油门开关等组成,负责平台前后、左右的平衡调节及升降调节。操作平台系统由固定平台、伸缩平台、电动液压缸、操控台等组成,主要负责操控平台实现多种功能,以及货物的装卸功能。其总体布局如图1所示。
3.2 工作原理
发动机带动双联齿轮泵把液压油箱的液压油输送入液压马达,驱动底盘行走机构行走,行走方向由电磁换向阀控制,行走速度由液压马达流量控制(见图2)。
3.3 基本参数确定
丘陵山区宜机化柑橘、琵琶、梨等果园的种植行株距一般为5 m×3 m,也有4 m×3 m。根据丘陵山区宜机化果园种植地形条件及作业需求,升降平台初步确定采用全液压底盘、液压剪叉式升降结构,横向纵向均可调平。
其主要参数为:配套动力12 kW,配80 mm油缸和304齿轮泵;整机宽度1.8 m左右;额定载荷1 t;升降高度≥1.5 m;行走速度0~0.3 m·s-1;调平角度横向≤12°,纵向≤13°;离地间隙≥140 mm;履带宽度230 mm;轨距1.57 m。
4 关键部件设计
4.1 液压底盘设计
液压底盘(见图3)由动力传输部分和行走系统组成。动力传输部分包括动力、冷凝器、水箱、燃油箱、液压油箱、齿轮泵、马达、液压阀、电磁阀、阀座、油管等部件,行走系统则包含行走底盘大架、履带张紧机构、轮系、履带等组成。其工作原理为:柴油机带动齿轮泵将液压箱中的液压油泵入主阀座,再通过安装在主阀座上的2组电磁换向阀控制液压油流入对应侧的驱动马达,最后驱动马达运转,并通过与其相连的驱动轮驱动履带,完成前进、后退、转向。
動力选用常柴EV80双缸水冷柴油机,其标定功率12 kW,标定转速3 000 r·min-1,最大扭矩43 N·m。齿轮泵选用CBWL-F310/F310,公称排量10 mL·r-1,额定压力16 MPa,最高转速3 000 r·min-1。电磁换向阀选用4WE6G-6X/CD12,驱动马达选用BMV-800-W9TDPD。行走系统(见图4)选用人字履带E230×72×58,其轮系由12齿驱动轮、Ф200导向轮、2个Ф150支重轮、2对Ф40托轮、2组Ф150悬浮轮组成,履带的张紧通过调节丝杠完成。
4.2 升降机构设计
升降机构为2级剪叉结构(见图5),由升降油缸、平衡阀、电磁阀、阀座、升降剪刀臂、升降底座、升降框架、转轴、滑动轴等组成。其工作原理为:齿轮泵泵出高压油,通过主阀座进入分流阀座,再通过分流阀座上的2组电磁换向阀流入单向平衡阀,最后流入2个油缸,油缸杆伸长,推动2级剪叉伸展,平台上升;换向阀动作,液压油经平衡阀、换向阀回流到液压油箱,油缸杆缩回,剪叉折叠,平台下降。
其中,电磁换向阀选用4WE6G-6X/ED24,单向平衡阀选用5160B,油缸选用HSG80/45-900-CA。HSG80/45-900-CA油缸是工程用液压油缸,缸内径80 mm,活塞杆外径45 mm,行程900 mm,摆尾型。
4.3 调平机构设计
调平机构由行走底盘大架、底盘上框架、油缸、平衡阀、电磁阀、阀座等组成(见图6)。其左右调平工作原理为:齿轮泵泵出高压油,通过主阀座进入分流阀座,再通过分流阀座1上的电磁换向阀流入横向控制双向平衡阀,最后流入对应侧的2个油缸,油缸杆伸出,平台左侧或右侧上升。换向阀动作,液压油通过平衡阀、换向阀回流到液压油箱,油缸杆回缩,平台下降。前后调平工作原理为:齿轮泵泵出的高压油,通过主阀座进入分流阀座,再通过分流阀座2上的电磁换向阀流入纵向控制双向平衡阀,最后流入对应侧的油缸,油缸杆伸出,平台前部或后部上升。换向阀动作,液压油通过平衡阀、换向阀回流到液压油箱,油缸杆回缩,平台下降。
其中左右、前后调平的电磁换向阀均选用4WE6G-6X/ED24,双向平衡阀均选用25160B,左右调平油缸选用HSG50/28-120-CA,前后调平油缸选用HSG63/35-150-CA。
5 关键部件有限元分析
5.1 行走底盘下层分析
从整体模型中提取出行走底盘下层模型,进行格式转化并导入ANSYS进行分析。对CAD模型进行网格划分,在模型平滑处使用六面体网格,在连接处和模型受力复杂处使用高阶四面体网。划分后的网格单元数为102 209,节点数为244 225。根据行走底盘上层框架在整车模型中的位置及实际受力情况,在顶部两根梁上施加10 MPa的压力,在梁下方施加约束。
仿真分析结果如图7、图8所示,最大变形出现在上部与其他部件的连接位置,为0.014 mm;最大应力为9.9 MPa,小于材料屈服强度,设计可靠。
5.2 行走底盘上层分析
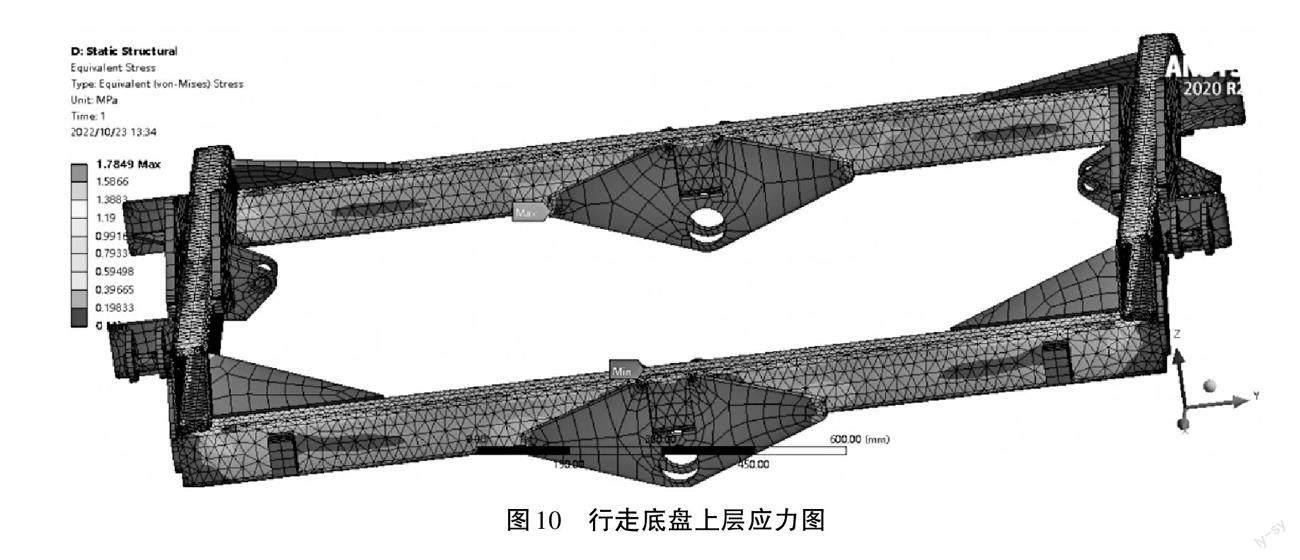
将行走底盘上层结构进行格式转化并导出到ANSYS中进行仿真分析。根据三维模型的具体情况进行网格划分。划分后共有40 049个单元,102 085个节点。根据行走底盘上层框架在整车模型中的位置和受力情况,对4根梁上分别施加6 MPa的压力,在梁下方施加约束。
仿真分析结果如下,最大变形量及具体位置如图9所示,为0.002 mm;最大应力大小及位置如图10所示,最大应力为1.78 MPa,小于材料屈服强度,设计可靠。
5.3 底盘上层框架分析
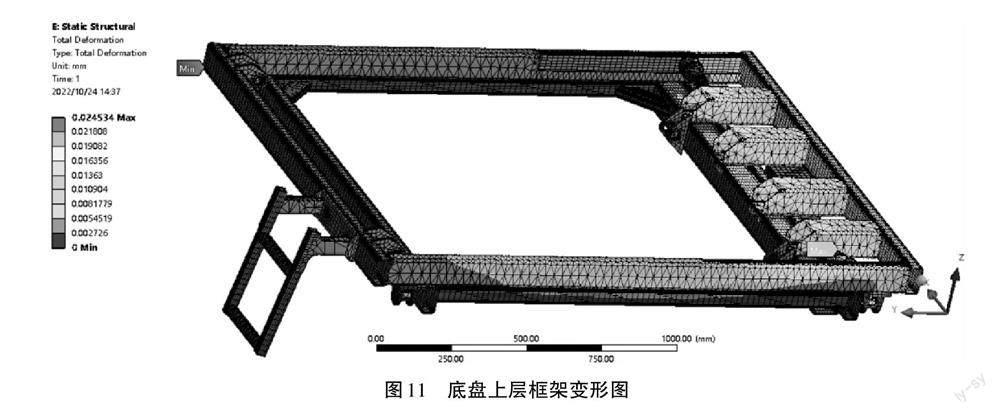
将底盘上层结构格式转化后导出到ANSYS中进行仿真分析。对三维模型进行网格划分,根据模型的具体情况进行网格划分。划分后共有130 881个网格单元,606 326个节点。根据底盘上层框架在整车模型中的位置和受力分析,对4根梁上分别施加载荷4 MPa的压力,在梁下方施加约束。
仿真分析结果如下,最大变形量及具体位置如图11所示,为0.025 mm;最大应力及位置如图12所示,为14.8 MPa,小于材料屈服强度,设计安全。
5.4 折叠梁框架有限元分析
将折叠梁进行格式转化并导出到ANSYS中进行仿真分析。对三维模型进行网格划分,划分后共有102 209个网格单元,244 225个节点。根据折叠梁在整车模型中的位置和受力分析,对4根梁上分别施加5 MPa压力,在梁下方施加约束。
仿真分析结果如下,最大变形量及具体位置如图13所示,为0.001 mm;最大应力及位置如图14所示,为0.84 MPa,小于材料屈服强度,设计安全。
6 多功能集成
平台设计成左右可伸缩的结构,2个电磁阀操控2个油缸,控制平台伸缩,实现装载面积的扩大和缩小,达到扩展作业范围的目的。
引进喷药装置和电动修枝剪,以发动机启动电池为动力,实现机载喷药,提高修剪续航能力。通过功能集成达到平台喷药、修剪、采摘和运输多种作业功能。
7 样机试验
样机试制后,分别在丘陵山区标准化柑橘园、枇杷园、梨园进行了喷药、修剪、运输、升降试验(见图15),可升降高度≥1.5 m、承载最大重量≥1 t,达到设计要求。升降功能使喷药位置和角度更精准、效果更好,使修剪更省力,调平功能提高了操作的安全性。
8 结论
1)研究的果园多功能升降作业平台可升降高度≥1.5 m、承载最大重量≥1 t,满足丘陵山区使用要求。
2)调平功能提高了操作的安全性,升降功能提高了作业的便利性。
参考文献:
[1] 国家统计局农村社会经济调查司.中国农村统计年鉴(2021)[M].北京:中国统计出版社,2021.
[2] 重庆市统计局,国家统计局重庆调查总队.重庆统计年鉴(2021)[M].北京:中国统计出版社,2021.
[3] 国家发展和改革委员会价格司.全国农产品成本收益资料汇编(2021)[M].北京:中国统计出版社, 2021.
[4] 扈凱,张文毅,祁兵,等.液压底盘在农业机械领域的应用与发展[J].江苏农业科学,2019,47(14):259-263.
[5] 张康.液压技术在农业机械上的应用现状和发展趋势[J].农业技术与装备,2020(1):66-67.
[6] 杨传龙.自走式多功能果园作业平台的设计与试验[D].泰安:山东农业大学,2018.
[7] MARCOS D F, AUGUSTO C S, OSCAR A B, et al. Harvesting fruit using a mobile platform: A case study applied to citrus[J]. Engenharia Agrícola, 2018, 38(2): 293-299.
[8] BAUGHER T, SCHUPP J, LESSER K, et al. Mobile platforms increase orchard management efficiency and profitability[J]. Acta Horticulturae, 2009, 824: 361-364.
[9] THAMSUWAN O, GALVIN K, TCHONG-FRENCH M, et al. A feasibility study comparing objective and subjective field-based physical exposure measurements during apple harvesting with ladders and mobile platforms[J]. Journal of Agromedicine, 2019, 24(3):268-278.
[10] 杨传龙,樊桂菊,王春武,等.多功能全液压果园作业平台的设计与试验[J].农机化研究,2019,41(1):110-114,126.
[11] 缪友谊,陈小兵,朱继平,等.果园作业平台研究进展分析[J].中国农机化学报,2021,42(6):41-49.
[12] 张鲁云,孟祥金,段爱国,等.果园升降作业平台国内外发展现状与对策建议[J].农业工程,2021,11(3):15-19.
(责任编辑:易 婧)
