守岛串联式混合动力汽车动力耦合控制策略研究
2023-07-30方瑞莲蔡强张维果何颖
方瑞莲 蔡强 张维果 何颖

摘要:動力耦合技术是混合动力汽车的核心技术,动力参数匹配结果直接影响车辆的动力性能。以串联式混合动力汽车的动力耦合控制技术为研究对象,根据汽车驱动系统的结构及动力源的参数特点。进行驱动系统动力参数匹配设计,提出一种能综合兼顾车辆行驶中动力性、经济性及排放性能的最佳驱动动力控制策略。
关键词:混合动力;控制策略;动力耦合
中图分类号:U469.7 收稿日期:2023-03-22
DOI:10.19999/j.cnki.1004-0226.2023.07.007
1 前言
近年来,汽车工业革命再次兴起,新能源汽车技术的突飞猛进是当前能源危机、环境恶化等大背景下的必然发展方向。从“十三五”以后,由于国家和地方的双重推动,新能源的质量和体量有了很大的变化,我国以混合动力汽车为核心的新能源汽车产业就开始进入加速阶段。“十四五”“新能源化”同样成为我国支持汽车产业跨域发展的内核。发展新能源汽车是实现碳中和目标的重要手段,而完全实现纯电动化周期较长,混合动力汽车将会是过渡期的重要替代品,在未来一定时期内是承担汽车低碳化发展的重要方案。中国汽车工程学会提出,到2025年、2030年和2035年,新能源汽车分别达到总销量的20%、40%和50%,节能汽车(包括48 V、HEV等混动技术方案)分别达到传统能源乘用车50%、75%和100%的总目标。由此预计,未来一段时间内,我国混动汽车将保持快速增长态势,并逐步实现对传统燃油车的升级替代[1]。
按照使用动力源不同分类,目前市场上主流新能源汽车有纯电动汽车及混合动力汽车两大类。纯电动汽车的续航是其发展的主要瓶颈,而混合动力汽车恰好弥补纯电动汽车的此缺陷,因此,混合动力汽车成为当前新能源汽车发展的主流,研究混合动力的动力耦合技术具有非常重要的意义。本文以理想ONE汽车为参考车型,基于该车型的一些参数对串联式混合动力汽车的动力耦合控制设计。
2 串联式混合动力汽车驱动系统介绍
混合动力汽车(Hybrid Vehicle)是指车辆的动力源由两个或者多个组成,它的系统会根据路况、汽车行驶的状况下分配动力。这里的混合动力汽车,通常是指油电混合,它是当下出行最常见的混动类型,动力源是由内燃机和动力电池组成。这种混动技术,可以让增程器避开低效率的工作区域,使增程器时时刻刻工作在高效区域。
根据动力电池和增程器连接结构的不同,可以将其分成串联式混合动力汽车(SHEV)、并联式混合动力汽车(PHEV)和混联式混合动力汽车(PSHEV)三种驱动模式。
所谓的串联式混合动力汽车其实就是增程式电动汽车,是在纯电动汽车基础上增加了一个发电机,发电机并不能直接驱动汽车行驶。当动力电池电量不足时给动力电池充电,同时驱动汽车行驶。它本质是两种动力装置直列式排列,前级的动力输出是后级的功率输入,由电能作为直接驱动动力,并且只有电力一种最终动力[2]。
2.1 动力源主要参数
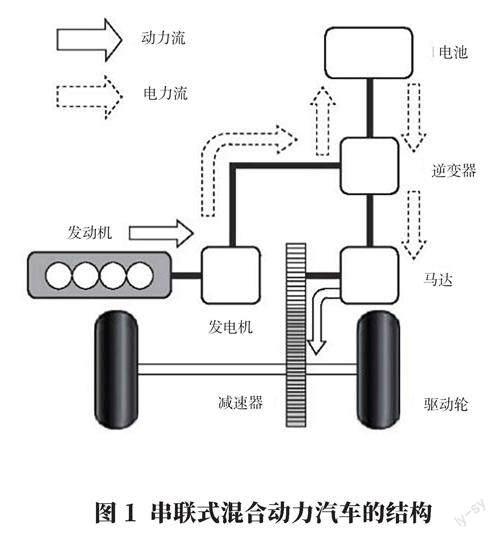
参考理想汽车某车型,本文研究的串联式混合动力采用增程器、动力电池为动力源,驱动车轮的力来自驱动电机,而给驱动电机的动力源是增程器和动力电池。即增程器动力经过驱动电机输出,动力电池通过驱动电机驱动汽车,增程器还可以给电池充电的动力方案设计。串联式混合动力电动汽车基本上由发电机、增程器、整流器、蓄电池组、机械传动装置和牵引电动机组成,如图1所示。
a.增程器主要参数。
采用排量为1 199 mL的涡轮增压增程器(型号DAM12TD),最大功率转速5 500 r/min,最大马力131 Ps,国六b的环保标准。
b.电动机参数。
对于串联式混合动力电动汽车,所有动力驱动完全依赖于电动机,因此要求起步或爬坡时低速恒转矩,高速时恒功率,正好利用电机的特性来驱动车辆,并实现制动能量回收。根据参考车型,本文研究采用总功率245 kW、总扭矩为455 N·m的双驱动电动机,电动机马力333 Ps;前电动机最大功率100 kW、最大扭矩240 N·m,后电动机最大功率145 kW、最大扭矩215 N·m。
c.动力电池参数。
采用可逆式直流高压电的三元锂电池,电池容量40.5 kW·h,最大对外放电功率2.2 kW,对外放电最低允许值20%。
2.2 工作概况
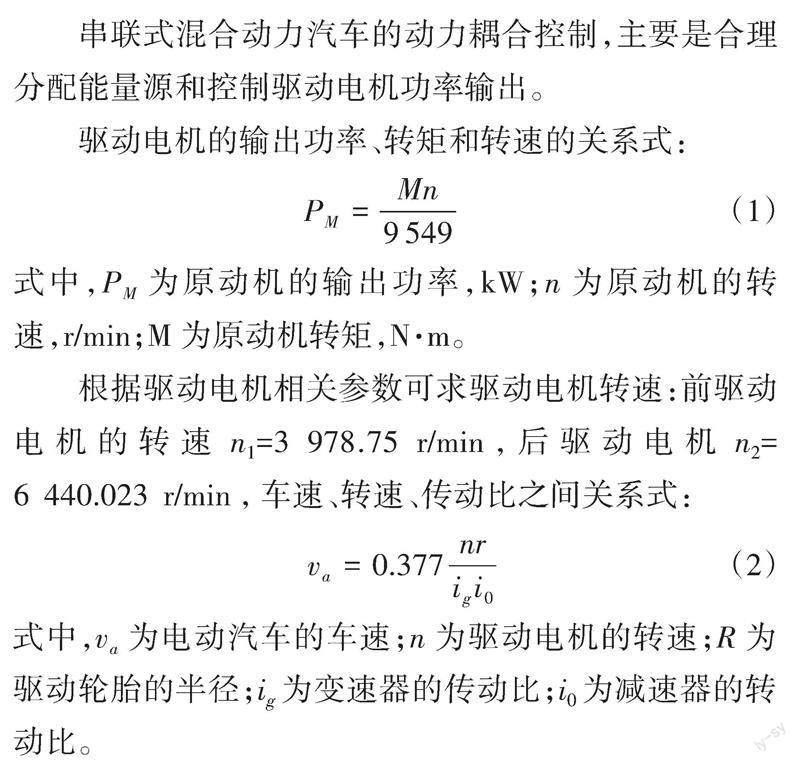
串联式混合动力汽车的动力耦合控制,主要是合理分配能量源和控制驱动电机功率输出。
驱动电机的输出功率、转矩和转速的关系式:
[PM=Mn9 549] (1)
式中,[PM]为原动机的输出功率,kW;n为原动机的转速,r/min;M为原动机转矩,N·m。
根据驱动电机相关参数可求驱动电机转速:前驱动电机的转速n1=3 978.75 r/min,后驱动电机n2=6 440.023 r/min,车速、转速、传动比之间关系式:
[va=0.377nrigi0] (2)
式中,[va]为电动汽车的车速;n为驱动电机的转速;R为驱动轮胎的半径;ig为变速器的传动比;i0为减速器的转动比。
本文研究的车型的动力传动系统中,驱动电机到车轮只用一个单级减速器,故ig=1,根据数据计算i0=5.4。汽车的驱动力以扭矩的形式传给驱动轮,最终由驱动轮驱动整车行驶,驱动轮的直径、宽度、高度等一些参数直接影响驱动效率,即驱动轮的规格影响汽车动力性能。本文以参考车型理想汽车某车型使用的轮胎,其前后轮胎的规格型号均是255/50 R20,即轮胎的宽度是255 mm、扁平率为50、轮毂直径20 in的子午线轮胎。再计算驱动轮的直径r,(r=轮辋直径+轮胎宽度×扁平率×2),可得r=0.3815 m。
增程专用增程器的转速在2 000~3 500 r/min范围,为其燃油消耗最理想的区域,对应的功率区域在24~52 kW。
由公式(1)可求增程器的最大输出功率和驱动电机的最大输出功率,其能量的转动效率[η=0.79],即[η=PfPd=0.7931],结合以上的相关参数计算得驱动电机的经济转速在1 586~2 776 r/min范围。再由公式(2)计算得增程器工作在经济时,相应的车速在42~74 km/h范围,故驱动力控制策略中,考虑当增程器介入工作时,确保增程器工作在经济区范围,即可有效地减少汽车的油耗[3-4]。
3 耦合控制方案
3.1 工作模式
串联式混合动力结构设计中,增程增程器输出扭矩不直接驱动电动机,而是驱动发电机发电,则发电机实现对动力电池充电或电驱动电动机的功能。车辆在各种不同的工况、环境行驶时,动力控制的基本原则是:对车辆要兼顾动力性、经济性等多方面性能,且满足续航,此外,还考虑能源节省,减少有害排放。基于动力控制基本原则,本文对串联式混合动力汽车的动力控制根据不同工况分三种模式进行研究,即纯电优先模式、燃油优先模式和油电混合模式[5]。
a.纯电优先模式。
当车辆在市区内行驶时,由于交通环境复杂,具有行驶里程不高,行驶速度为60 km/h以内,环境排放要求高等特点,车辆所需的驱动力由动力电池组提供,即电池优先驱动电机输出。若动力电池组的SOC值低于20%时,才由增程器驱动发电机发电,由发动电机输出动力驱动电机,保证车辆动力性及续航。驱动力传输如图2a所示。
b.燃油优先模式。
当车辆在市外郊区或者偏远的乡村路行驶时,由于道路条件较差,路面窄、弯曲、坡度多等情况;周边充电站少甚至没有,充电条件受限制,因此车辆所需的驱动力控制基本原则为:当电池组的SOC值高于70%时,由电池组驱动电机;当电池电量低于70%或车辆处于急加速行驶、爬坡时增程器才会介入工作,同时在保证动力满足的条件下给电池包充电。驱动力传输如图2b所示。
c.油电混合模式。
当车辆需要远距离或高速公路行驶时,车辆的行驶速度以高速为主,且确保续航。此工况下,即便开始动力电池组的SOC值还高,若先由动力电池提供驱动力,则电池组的SOC值很快下降,其下降后再由增程器发动给蓄电池充电则增加油耗,能源利用效率低,甚至影响旅程。因此,此工况下采用增程器及电池组共同驱动的模式,增程器在经济区工作,动力电池的SOC值低于80%则由增程器充电,确保动力电池的SOC值不低于80%。驱动力传输如图2c所示。
d.行车充电模式。
车辆在行驶过程中,控制单元采集到动力电池的SOC值小于设定值(不同模式设定值不同)时,增程器会介入工作,在满足汽车行驶所需的动力的前提下,把剩余的电量通过充电模块保存到动力电池里面储存起来。驱动力传输如图2d所示。
3.2 控制方案
车辆行驶过程中,不同工况所需的动力不同。本文研究控制方案基于单片机技术进行对动力输出控制,控制单元是根据控制策略编制程序的控制模块,通过各传感器采集车辆实时状况,车速、动力电池的SOC值等状态、车辆制动、急加速、爬坡等参数作为动力控制的主要参考参数(因素),将信号反馈给控制中心,控制中心通过数据计算、对比分析,确定动力模式并对执行装置发出执行指令执行装置接收到执行信号后,对动力进行控制,增程器、动力电池二者电动动力输出控制,从而达到控制的目的[6-7]。控制方案框图见图3。
4 结语
混合动力是一个复杂的多动力源系统,不同工况下动力输出的控制策略要兼顾车辆的动力性、经济性外,还考虑排放、车辆寿命、续航里程等多方面因素。通过以车速和动力电池的SOC值为主要参数的混合动力控制策略,根据不同工况分纯电输出、纯燃油输出、混合输出三种动力输出模式,同时电池的SOC值低于设定值时增程器给电池充电。在三种模式中,单一动力源输出模式相对比较简单,二者动力共同输出模式较为复杂,难点在于各二者动力输出动力的匹配,本文仅以按照参考车型计算的经济车速范围内二者共同输出,二者动力输出的精准匹配有待继续深入研究。
控制策略程序完成编制后,对系统的控制方案进行仿真,通过电路仿真软件proteus或者相关软件仿真;或者通过模型制作对系统仿真验证,本文研究的控制方案可行,三种模式的动力输出顺畅达到预期效果。
参考文献:
[1]袁军成,范佳甲.中国新能源汽车“十四五”政策法规展望[J].质量与认证,2020(12):78-80.
[2]黄家贵.混合动力电动汽车关键技术分析[J].科学技术创新,2020(14):60-61.
[3]陈子兴.串联式混合动力汽车结构技术分析[J].内江科技,2009,30(12):85-86.
[4]田宝春.串联式混合动力电动汽车电动机设计[J].装备制造技术,2012(7):288-290.
[5]王锦艳,张作美,孙萧,等.增程式电动汽车专用发动机技术浅析[J].汽车实用技术,2022,47(6):10-13.
[6]麦明珠,何建威.混合动力汽车驱动系统方案设计及控制策略研究[J].内燃机与配件,2020(16):18-19.
[7]杨大举.混合动力汽车的控制策略研究[J].专用汽车,2022(9):34-36.
作者简介:
方瑞莲,女,1982年生,工程师,研究方向为新能源汽車动力。
