电动拖拉机PC-DSPM电机电子变极策略与分析
2023-07-28孙延东朱孝勇严序康
杜 怿,孙 旭,孙延东,肖 凤,朱孝勇,毛 怡,严序康
•农业装备工程与机械化•
电动拖拉机PC-DSPM电机电子变极策略与分析
杜 怿1,孙 旭1,孙延东2,肖 凤1※,朱孝勇1,毛 怡1,严序康1
(1. 江苏大学电气信息工程学院,镇江 212013;2. 中汽创智科技有限公司,南京 211100)
针对田间作业和转场运输等不同工况时的行驶速度需求,该研究提出使用双凸极变极永磁(pole-changing doubly-salient permanent magnet,PC-DSPM)电机作为电动拖拉机的驱动电机,通过变极获得驱动电机的多种机械特性。基于气隙磁场调制理论,将PC-DSPM电机气隙磁场中的主要工作谐波分为2组,采用电子变极改变电枢绕组连接方式,从而选择不同组别的气隙磁场谐波参与机电能量转换,形成PC-DSPM电机3种运行模式。根据不同模式下的转矩-转速曲线,选取电机在恒功率区的2个变极切换点,并据此将拖拉机的运行速度划分为0~7.7、7.7~10.5和10.5~32.7 km/h共3个区间。为实现平滑变极,构建自抗扰控制和跟踪微分器的PC-DSPM电机变极策略。与采用自抗扰控制的阶跃响应变极相比,虽然2个切换点处的变极时间分别延长至400和600 ms,但变极过程中轴电流过渡平稳,转矩波动分别下降8.5%和11.8%,转速恒定在920和1 250 r/min。研究结果可为实现电动拖拉机多工况高效运行及变极永磁电机平滑切换提供理论参考。
拖拉机;永磁电机;电子变极;六桥臂逆变器;跟踪微分器
0 引 言
电动拖拉机采用电机提供动力,具有高效率、零排放、低噪音等特点,是实现高效和绿色可持续农业生产的有效手段之一[1-2],特别对具有空间狭小、封闭,不利于废气、噪音等排放物耗散特征的设施农业[3-5],电动拖拉机的优势尤为突出[6-7]。与电动汽车不同,拖拉机的运行工况通常包括田间作业和道路运行两大类[8],前者具有运行速度低、转矩需求大等特点,行驶的典型速度为2~7和7~10 km/h;而后者主要用于转场和运输等工况,典型运行速度一般为20~35 km/h[9]。可见,拖拉机的调速范围高达10倍以上,远大于电动汽车对驱动电机扩速能力的要求,且其运行速度具有明显的分段特征。近年来,为实现电动汽车驱动电机宽调速范围高效运行,国内外学者展开了大量研究[10-11],为电动拖拉机驱动电机类型选择和优化设计提供了有益借鉴,但由于两者运行工况的显著差异,导致现有电动汽车驱动电机的设计思路和方法不能完全适用于电动拖拉机。
改变电机极对数可以改变电机的特性参数,进而形成变极前后不同的机械特性,拓宽电机高效运行速度范围,符合电动拖拉机典型运行工况速度分段、宽调速范围等需求。国内外学者对变极感应电机、变极永磁电机、变极磁阻电机均展开了大量研究。对于感应电机而言,仅需改变定子线圈间的连接,进而改变电枢磁场的极对数,即可实现电机的变极运行。使用开关器件能十分简单地改变线圈的连接[12],但该方案会在变极瞬间产生断流现象,使变极过程不连续。为此,文献[13-14]提出极相调制变极方案,采用六桥臂逆变器控制两套定子绕组,在变极瞬间仅需改变其中一套绕组中电流的相位,从而实现了所谓电子变极。这种阶跃式电子变极虽然能使转矩连续,但电流的突变必将导致较大的转矩波动,使变极过程不平滑。文献[15]提出斜坡响应电子变极策略,试验表明,与阶跃变极相比,斜坡变极虽然延长了变极瞬态时间,但有效降低了转矩波动。另外,由于多相电机具有多个控制自由度,文献[16-17]将基波平面电流与谐波平面电流进行切换,并利用指数函数变化过程比较光滑的特点实施了五相感应电机电子变极,实现了电机转速和转矩的平稳过渡。基于感应电机电子变极方法,并结合永磁同步电机的特点,变极永磁同步电机[18]可通过控制电流角的变化实施变极操作,使得变极永磁电机既具有变极感应电机宽调速范围的优点,又具有永磁电机高效和高功率密度等特性。
文献[19]提出了一种П型铁心结构的双凸极变极永磁(pole-changing doubly-salient permanent magnet,PC-DSPM)电机,该电机的永磁体和电枢绕组均位于电机定子,而电机转子仅为设有凸极的铁心,因此具有便于冷却、高功率密度、高效率等特点。但该论文仅对电机结构、运行原理、电磁性能进行了分析,并未具体给出电机的变极切换方法以及切换过程。本文以PC-DSPM电机为例,对变极永磁电机电子变极的平滑切换策略进行研究。为了更清楚地说明,首先对PC-DSPM电机结构和运行原理作简要讨论,并给出电机在不同模式下的变极条件;其次提出利用跟踪微分器控制电流角变化过程,使变极过程中的电流光滑无超调地过渡到给定值,实现电机的平滑变极切换。
1 Π型双凸极电机结构以及电子变极原理
1.1 电机结构
本文以12/7极PC-DSPM电机为对象,如图1所示,该电机定子上有6块П型铁心,形成的12个定子槽内嵌有12个跨距为1的线圈,相邻定子铁心轭部间夹装6块切向充磁的永磁体,且相邻永磁体充磁方向相反;转子为设有7个凸极的铁心结构。

图1 电机结构
1.2 变极运行原理
与感应电机不同,PC-DSPM电机基于定转子凸极齿对永磁磁场的调制作用[19],产生具有不同极对数且对应不同槽距角的气隙磁密谐波,进而配合不同连接的电枢绕组,实现电机的变极运行。因此,对PC-DSPM电机永磁磁场进行分析,是获取绕组连接方式和实施变极运行的基础。
图2为PC-DSPM电机永磁气隙磁密波形及谐波分析。从图2中可以看出,极对数为2、3、4、9、10和16的谐波分量幅值较大。其中,3对极谐波由定子上静止的永磁体直接产生,9对极谐波由12个定子齿对静止的3对极永磁磁场调制产生,因此上述2种谐波分量均与绕组相对静止,无法产生感应电势;而2、4、10和16对极谐波分量则由转子凸极对静止谐波分量的调制作用产生,且随转子同步旋转(电速度相同),因此可在定子绕组中产生感应电势,为工作谐波。

图2 永磁磁密及谐波分析
Fig.2 Permanent magnet flux density and harmonic analysis
图3为2和10、4和16对极永磁谐波对应的线圈感应电势矢量图。从图3中可以看出,逆时针为正方向时,2和10对极永磁谐波对应感应电势的槽距角为-60°,4和16对极永磁谐波对应感应电势的槽距角为120°。因此,上述4种幅值较大的旋转永磁谐波磁场可以按照槽距角分为2组。综合考虑上述4种谐波得到的总感应电势如图3c所示。当定子线圈分别按图3进行绕制时,即可基于电枢绕组的滤波作用[20],选取某1组或2组永磁磁场谐波参与机电能量转换,进而实现PC-DSPM电机的变极运行。

注:1、2、3…表示线圈号。
观察图3可知,线圈1和7(线圈组1)、5和11(线圈组2)、3和9(线圈组3)、4和10(线圈组4)、2和8(线圈组5)、6和12(线圈组6)的感应电势矢量始终保持同相位,且线圈组1、2和3之间,线圈组4、5和6之间分别互差120°。因此,在考虑PC-DSPM电机变极过程中的绕组连接时,可将12个定子线圈分为2套三相绕组,即同一线圈组的2个线圈正向串联形成6个线圈组,线圈组1、2、3和线圈组4、5、6分别构成三相绕组1和三相绕组2。为充分利用上述永磁谐波磁场,获得尽可能大的空载感应电势,可以得到与图3对应的3种绕组连接方式,进而获得PC-DSPM电机3种运行模式,如表1所示。可见,在PC-DSPM电机变极运行过程中,其绕组的不同连接方式,可由2套三相绕组之间不同方向的串联实现。图4给出了3种绕组的具体连接方式。
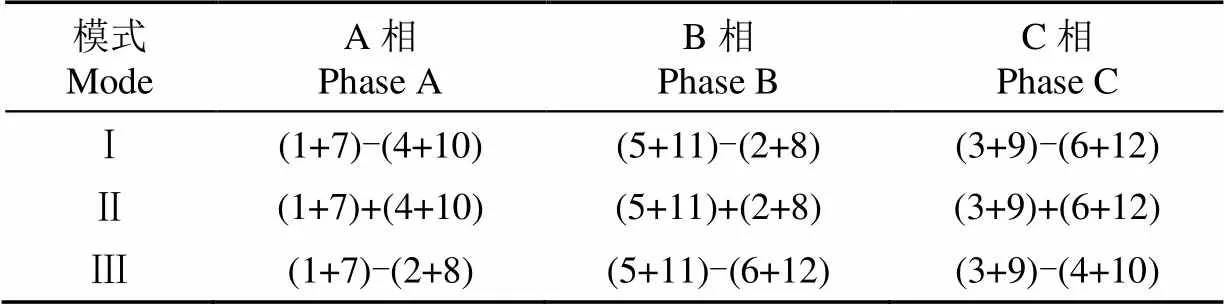
表1 不同模式的绕组连接方案
注:“+”和“-”分别代表线圈组同向和反向串联;1、2、3…表示线圈号。
Note: “+” and “-” represent that coil groups are connected in the same and reverse direction; 1, 2, 3… represent the coil No..
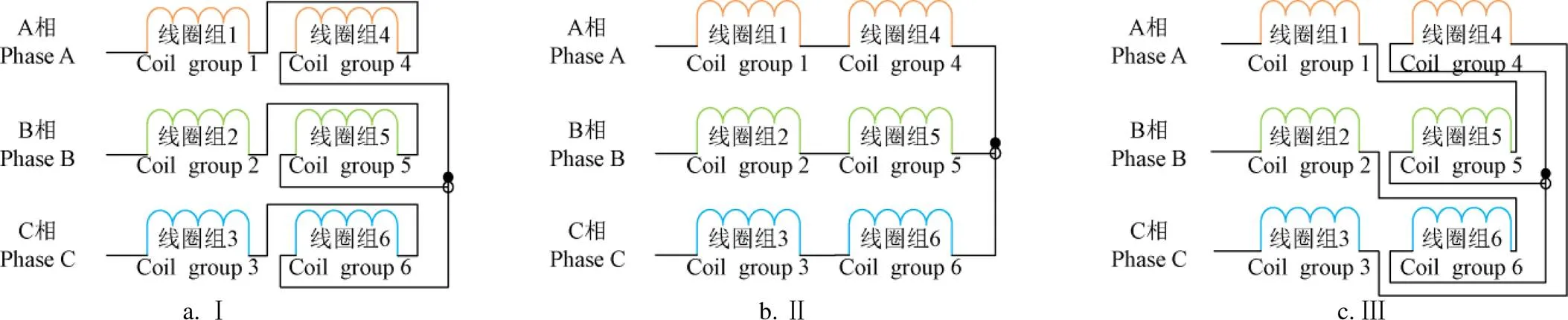
图4 不同模式下的绕组连接方式
将2个线圈组正向或反向串联可使2个线圈组中的电流方向相同或相反,因此可采用六桥臂逆变器对2套三相绕组6个线圈组中的电流进行分别控制,以获得与图4绕组连接方式相同的效果,即电子变极,如图5所示,此时PC-DSPM电机演化为双三相电机。与传统双三相电机不同的是,PC-DSPM电机的2套三相绕组中的电流相位需根据图3所示的线圈感应电势相位进行控制。值得指出的是,PC-DSPM电机的轴电感十分接近,可以忽略凸极效应[19],因此本文在恒转矩区采用轴电流d=0控制策略,以提高电流利用率,即在不同的运行模式下,电流相位与相应的合成空载感应电势相位相同;在恒功率区采用弱磁控制以实现电机的不同运行特性,即根据合成电流超前线圈空载感应电势计算参考电流的给定值。

注:Udc是电压,V;“+”和“-”代表电压正极和负极端;is1~is6是线圈组中电流,A。
1.3 机械特性与变极条件
基于绕组连接的切换,PC-DSPM电机可运行于不同模式,以兼顾低速大转矩和宽调速范围。图6为3种模式运行时的机械特性曲线,从图6中可以看出,模式I的最大转矩和转速分别为4.3 N·m和3 900 r/min,其转矩输出能力最小,但转速范围最大;而模式III反之,其最大转矩和转速分别为7.6 N·m和2 370 r/min;模式II介于两者之间,最大转矩和转速分别为6.2 N·m和3 100 r/min。为尽可能实现电机的平滑运行,选择不同模式机械特性曲线的交点作为模式的切换点,即第一切换点(920 r/min,4.75 N·m)和第二切换点(1 250 r/min,3.4 N·m),进而形成高速区、中速区和低速区3段式运行模式,最终的运行轨迹如图6中的粗实线所示。

图6 不同模式下的转速-转矩曲线
根据2个变极切换点将电机的转速范围划为3个区间,分别适用于电动拖拉机的不同运行工况。转速为1 250~3 900 r/min时,电机运行于模式Ⅰ,适用于电动拖拉机道路运行工况;转速为920~1 250 r/min时,电机运行于模式Ⅱ,适合于水田耕作等低速小载荷田间作业;转速在0~920 r/min时,电机运行于模式Ⅲ,适用于旱田旋耕等低速大载荷田间作业。如表2所示,忽略机械损耗,当PC-DSPM电机搭配固定齿轮传动比=18的变速箱以及7.50-20型号的轮胎,其半径=0.4 m时,电动拖拉机相应的运行速度分别为0~7.7、7.7~10.5和10.5~32.7 km/h。
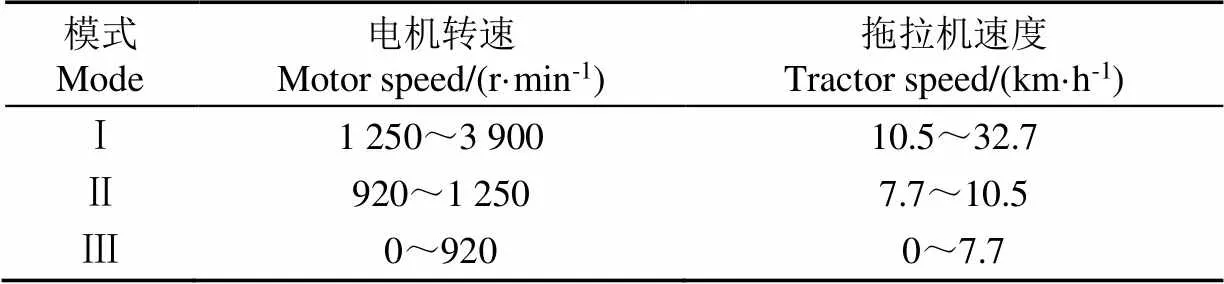
表2 电机和拖拉机的运行参数
2 平滑电子变极策略
为实现PC-DSPM电机的平滑电子变极,构建基于扩张状态观测器的自抗扰控制策略,并采用跟踪微分器控制电流角的过渡过程。
2.1 自抗扰控制器设计
在电机的变极过程中,电机系统不可避免地面临各种内部和外部扰动,且扰动的上界很难确定[21]。自抗扰控制将系统中异于标准型的部分视为总扰动,并把总扰动扩张为一个新的状态,利用扩张状态观测器观测出总扰动,并采用非线性误差反馈律加以补偿,从而对扰动进行实时消减与抑制[22-25]。
在同步旋转坐标系中,Π型PC-DSPM电机定子电压方程可以表示为
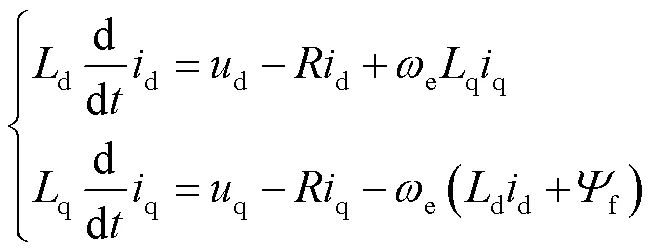
式中d和q为同步旋转坐标系下定子电压,V;d和q为轴电流,A;为时间,s;d和q为电枢电感分量,H;为电阻,Ω;f为永磁磁链,Wb;e是电机转子角速度,r/min。
以轴定子电压为例,令:

式中1和2分别视为内部和外部扰动,d*为参考电压,V;令d=1+2,d=1/d,由式(1)可得轴电流:
同理可得轴电流:


对于上述的状态空间方程,可构造如下一阶扩张状态观测器:

非线性误差反馈律对参考输入信号及扩张状态观测器观测信号的非线性组合误差进行控制,最终对扩张状态观测器观测出的总扰动进行补偿,其结构如下:
其中03,和为非线性误差反馈律的参数。03的取值与系统响应速度和负载突变时的速度变化有关,在一定范围内,数值越大,响应越快。0为等效控制量,fal为跟踪函数,其结构为


2.2 基于跟踪微分器的变极策略
对于电子变极切换过程,最关键的是确定一种电流过渡方法,使电机在不同模式之间平滑切换,即要求电流角的切换快速、准确和平滑。而对于常数值电流角的输入,跟踪微分器可以在有限时间内无超调地跟踪上给定值,实现电流角的平滑切换。跟踪微分器的算法如下:
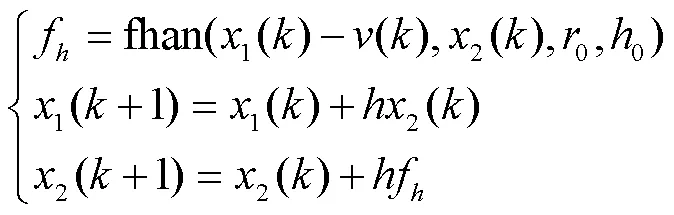
式中()为输入信号,1()为()的跟踪信号,为仿真步长;2()为1()的微分信号,fhan是最速跟踪函数,可以使跟踪微分器快速无超调地跟踪上给定值,其结构如下:
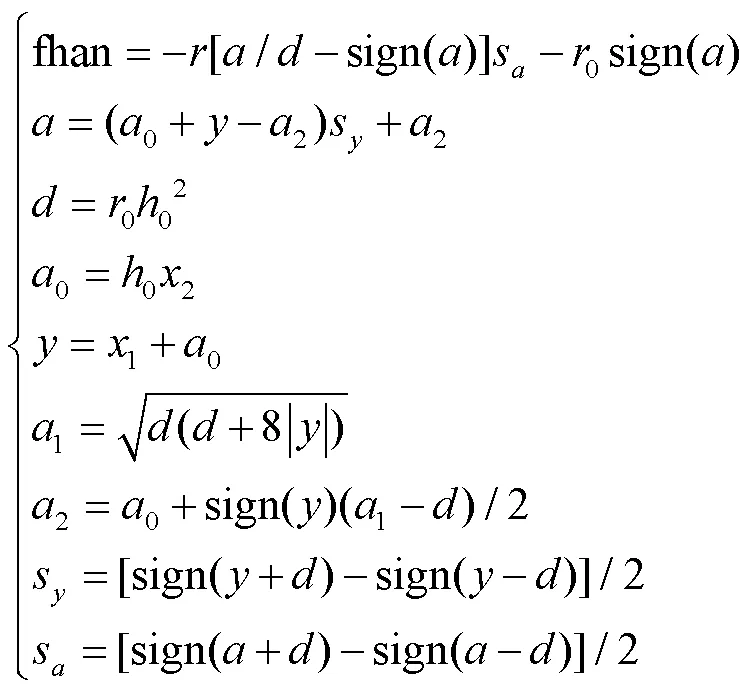
式中0是速度因子,可以决定跟踪输入信号的速度,0越大,跟踪速度越快;0是滤波因子,其值应适当大于步长。图8为跟踪微分器的结构框图。
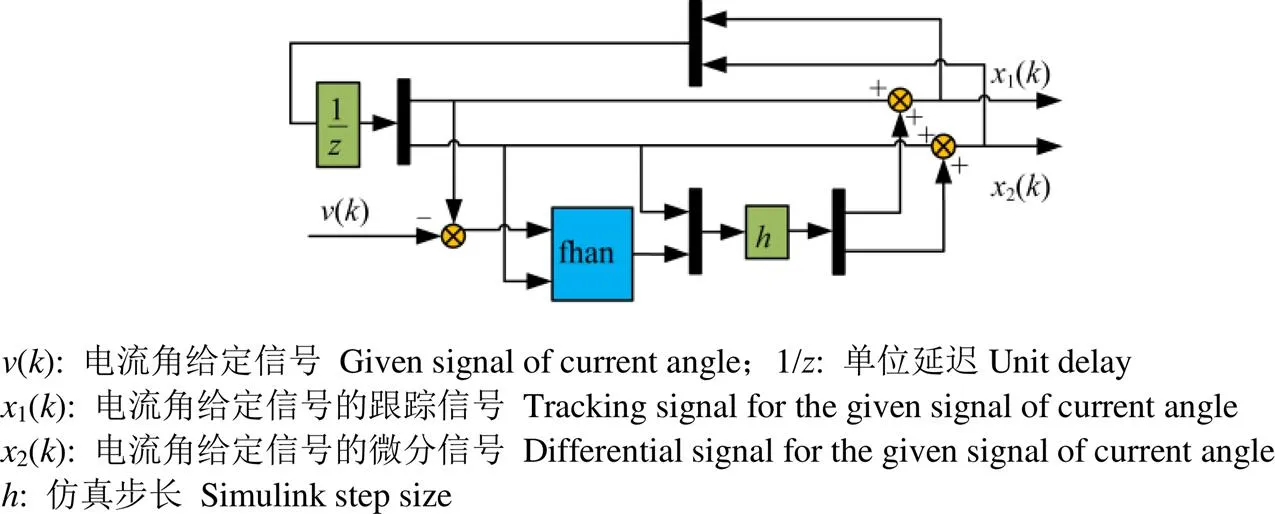
图8 跟踪微分器结构框图
假设给定电流角的变化量为,0代表过渡的总时间,那么由跟踪微分器确定的变化跟踪曲线在前半段时间[0,0/2]内将会沿着抛物线以0为加速度上升至/2,此时上升速度达到最大值。在后半段时间[0/2,0]内,曲线会以0的加速度做减速运动,但当继续上升达到给定值之后,加速度和速度将同时变为0。最终跟踪微分器确定的曲线会无超调地稳定在给定值,且总过渡时间0、最大加速度0和给定电流角的变化量的关系为

图9给出了不同0值时跟踪微分器确定的曲线变化过程。可见,变化曲线呈现先平缓、后剧烈,并最终趋于平缓的趋势。当给定电流角的变化量相同时,随着0的增大,总过渡时间0缩短。更为重要的是,从图中可以看出,即使当给定电流角的变化量不相等,也可通过调节0的取值,使两者的过渡时间0相同。

图9 跟踪微分器曲线
不停电情况下实现PC-DSPM电机的变极操作,其基本思路是在电机变极过程中,通过转子磁场定向矢量控制将电机定子电流分解为励磁电流分量d1、d2和转矩电流分量q1、q2,采用电流角切换的方式改变每个模式下各参考电流的大小,即励磁电流参考值d1、d2和转矩电流参考值q1、q2,从而使电机平稳地运行在给定模式下。式(12)给出了变极过程中各参考电流的变化。

式中是电流角,表示某一运行模式时,相应线圈组中合成电流与该线圈组空载感应电势之间的夹角,下标1和2表示2套三相绕组,=I、II、III代表电机的3种运行模式。
3 仿真与试验
3.1 PC-DSPM电机参数
为建立较为精确的仿真与控制模型,本节对PC-DSPM电机的电磁性能进行计算和分析。图10为PC-DSPM电机六相永磁磁链波形图,由图可见,其幅值为0.0756Wb,波形正弦且对称,并由此可以获得正弦且对称的空载感应电势,相比采用E型铁心的传统双凸极永磁电机,该电机的转矩脉动可得到有效抑制。图11为轴电感波形,轴电感平均值为7.785 mH,轴电感平均值为7.73 mH,轴电感近似相同,可忽略电机的凸极效应,并在恒转矩区可采用轴电流d=0控制策略,以提高电流利用率。
表3给出了电机的关键电磁参数,其中转动惯量由转子参数计算获得,绕组电阻为室温20 ℃时的估算值。
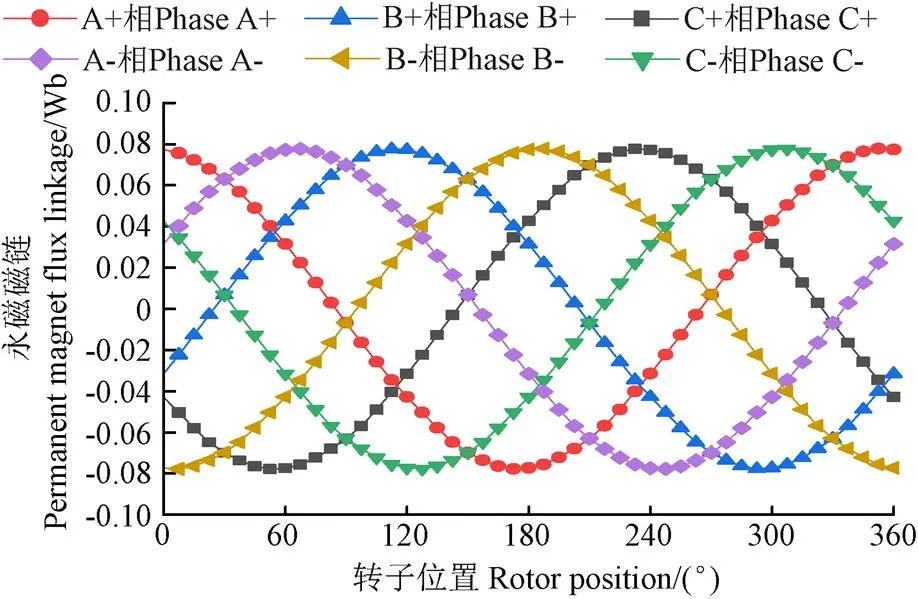
图10 永磁磁链波形
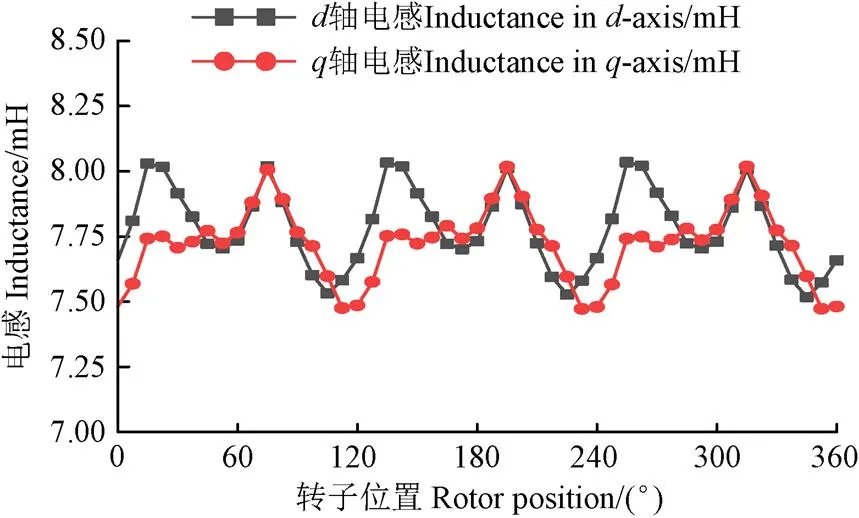
图11 电感波形
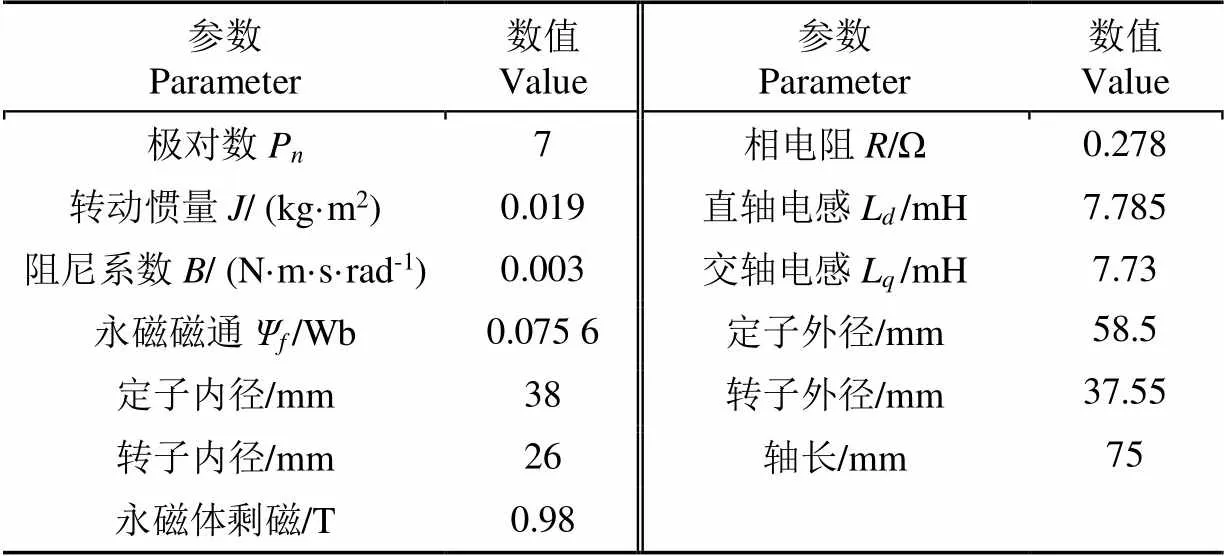
表3 电机参数
3.2 仿真结果与分析
采用Matlab/Simulink对基于自抗扰控制的跟踪微分器电子变极方案进行仿真验证,其中自抗扰控制参数如表4所示。
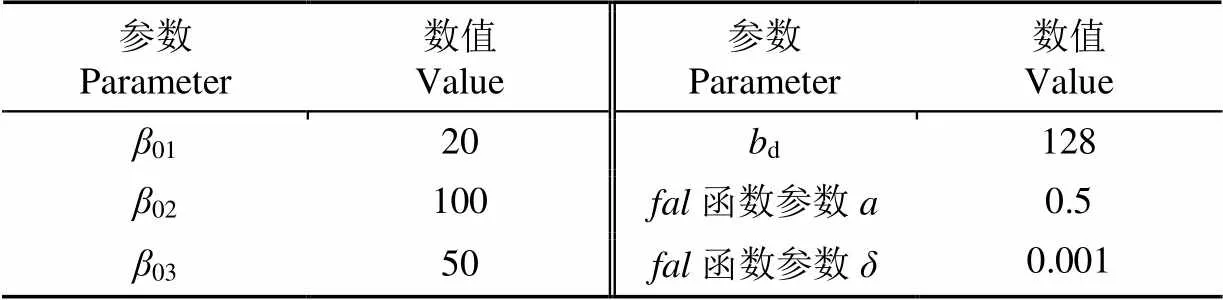
表4 自抗扰控制参数
在驱动电机转速不断变化且经过第一切换点和第二切换点时,PC-DSPM电机的运行模式应分别在模式III和模式II,模式II和模式I之间切换。由于电气时间常数远小于机械时间常数,可认为切换过程中的电机负载转矩和转速保持不变。图12a和图13a为变极过程中A相电流波形,从图中可以看出,2套线圈的电流相位分别经历了3种模式,与电机运行原理一致。另外可以看出,电机在第二切换点进行模式切换时,2套线圈的电流相位差从0°变为180°,变化幅度较大。另外,从图12a与图 13a局部放大图可见,2套线圈的电流相位变化平滑,且变极过程中电流无超调,实现了电机的平滑变极切换。
图12b、12c和图13b、13c分别显示了2次变极切换过程中轴电流的变化过程。由于电机在恒功率区采用弱磁控制,因此电机合成电流超前2套线圈反电势的角度不同,从而使变极过程中两套线圈轴电流的变化幅度以及变化方向各不相同。另外,从图中可以看出,轴电流的变化曲线呈现先平缓、后剧烈,再趋于平缓的趋势,并且电流的大小最终无超调地过渡到稳态值,实现了电机的平滑变极切换。

图12 模式Ⅲ到模式Ⅱ的电子变极过程
3.3 验证试验
为进一步验证所提理论及仿真结果,基于RTU-box搭建了PC-DSPM电机变极试验平台,并对基于自抗扰控制的跟踪微分器电子变极及传统阶跃响应电子变极方法进行试验对比,其中后者的电流环同样采用自抗扰控制策略,且试验工况与仿真保持一致,以突出本文提出的跟踪微分器电子变极的优越性,试验平台如图14所示。
图15为电机运行在第一切换点(920 r/min,4.75 N·m)时,模式III到模II的切换过程。从图15a中可以看出,电机在变极前后电流的幅值均为4 A,且变极后2套绕组的电流相位相同,相位差为0°。另外,从图15a中还可以看出,采用基于自抗扰控制的阶跃响应变极方法虽然能使电机较快地实现变极切换,但是电机在变极过程中转速下降了10 r/min,转矩从4.75 N·m下降至4.35N·m,下降8.5%。如图15b所示,本文基于自抗扰控制的跟踪微分器变极方法虽然将变极暂态时间延长至400 ms,但是使电机的转速和转矩分别稳定在920 r/min和4.75 N·m,有效降低了电机在变极过程中转速和转矩的波动,使电机的输出不受影响。另外,2套线圈的电流相位逐步渐变到给定模式下,实测电流波形与仿真结果一致。

图13 模式Ⅱ到模式Ⅰ的电子变极过程
图15c和图15d为2种变极策略下的轴电流变化波形,其中第一和第二套绕组的轴电流分别从3.6和3 A变化至4.6和0.2 A,而轴电流分别从2.7和3.2 A变化至1.5和4.7 A。采用阶跃响应方法时,由于绕组电感的作用,电机的实际电流不会发生突变,因此电流在变极过程中呈现先快速后逐渐趋于平缓的趋势,但这也使得实际电流并不能迅速跟踪给定电流,并进而导致较大的转速和转矩脉动。此外,跟踪微分器方法将变极过程延长至400 ms,但整体上降低了电流的变化率,从而使过渡过程更平滑。
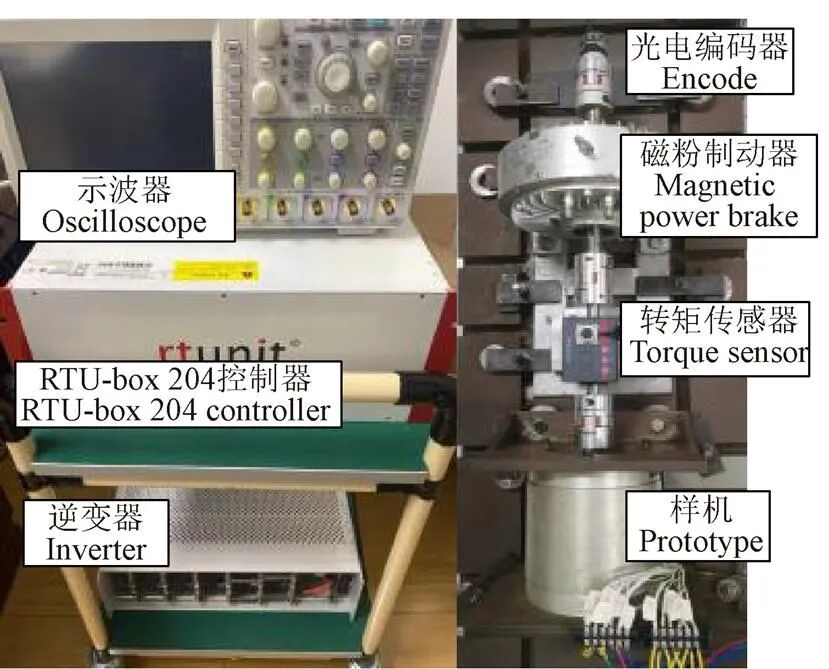
图14 试验平台
图16为电机运行在第二切换点(1 250 r/min,3.4 N·m)时,模式Ⅱ到模式Ⅰ的切换过程,2种控制策略的差异分析与第一切换点类似。此外,由于从模式II切换为模式I时,2套绕组中的电流相位差从0°切换为180°,远比模式III切换为模式II时的电流相位变化大,因此,采用阶跃响应变极方法导致的转矩与转速脉动更为显著,其中转速下降了20 r/min,转矩从3.4 N·m下降至3 N·m,下降11.8%,而如图16b所示,基于自抗扰控制的跟踪微分器变极方法则仍能使电机的转速和转矩保持1 250 r/min和3.4 N·m恒定值,进一步了证明本文变极策略的有效性。图16c和图16d为2种变极策略下的轴电流变化波形,其中第一和第二套绕组的轴电流分别从4.2和1.2 A变化至0.2和4.2 A,而轴电流分别从0.2和4 A变化至4和0.2 A。另外,从图中可以看出,此时采用跟踪微分器变极方法使切换过程延长至600 ms,但使电流整体的变化呈现先缓慢,后快速,再缓慢的特点,实现轴电流的平滑过渡。

图15 模式Ⅲ到模式Ⅱ的电子变极过程

图16 模式Ⅱ到模式Ⅰ的电子变极过程
4 结 论
针对拖拉机田间作业和道路运输时运行速度具有分段特征以及较宽的调速范围,提出使用PC-DSPM(pole-changing doubly salient permanent magnet)电机作为电动拖拉机的驱动电机,通过变极扩宽电机运行转速,并对不同模式之间的平滑切换进行研究,结论如下:
1)搭配传动比为18的变速箱以及半径为0.4 m的轮胎时,PC-DSPM电机的变极运行可将电动拖拉机运行速度划分为0~7.7、7.7~10.5和10.5~32.7 km/h,分别适合于旱田旋耕、水田耕作以及道路运输工况。
2)采用传统阶跃响应变极时,PC-DSPM电机在2个切换点处变极的过程中转矩波动分别为8.5%和11.8%;而提出的跟踪微分器变极策略可使变极过程中轴电流平稳过渡,转矩稳定在给定值4.75和3.4 N·m。
3)相比传统阶跃响应变极,跟踪微分器变极策略2个切换点处的变极时间分别延长至400和600ms。
[1] 武仲斌,谢斌,迟瑞娟,等. 电动拖拉机田间巡航作业驱动转矩管理模型[J]. 农业工程学报,2019,35(4):88-98. WU Zhongbin, XIE Bin, CHI Ruijuan, et al. Driving torque management model for electric tractor in field cruise condition[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(4): 88-98. (in Chinese with English abstract)
[2] 刘孟楠,雷生辉,赵静慧,等. 电动拖拉机发展历程与研究现状综述[J]. 农业机械学报,2022,53(S1):348-364. LIU Mengnan, LEI Shenghui, ZHAO Jinghui, et al. Review of development process and research status of electric tractors[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(S1): 348-364. (in Chinese with English abstract)
[3] 付学谦,杨菲菲,周亚中,等. 设施农业能源互联网智能预警理论:评述与展望[J]. 农业工程学报,2021,37(21):24-33. FU Xueqian, YANG Feifei, ZHOU Yazhong, et al. Intelligent early warning theory of the facility agricultural energy internet: Review and prospect[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(21): 24-33. (in Chinese with English abstract)
[4] 吴晨,李发文,冯平,等. 设施农业雨水集蓄利用与番茄灌溉方案优化[J]. 农业工程学报,2021,37(21):153-162. WU Chen, LI Fawen, FENG Ping, et al. Rainwater harvesting and tomato irrigation schemes optimization for facilities agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(21): 153-162. (in Chinese with English abstract)
[5] 付学谦,周亚中,孙宏斌,等. 园区农业能源互联网:概念、特征与应用价值[J]. 农业工程学报,2020,36(12):152-161. FU Xueqian, ZHOU Yazhong, SUN Hongbin, et al. Park-level agricultural energy internet: Concept, characteristic and application value[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 36(12): 152-161. (in Chinese with English abstract)
[6] 王元杰,刘永成,杨福增,等. 温室微型遥控电动拖拉机研制与试验[J]. 农业工程学报,2012,28(22):23-29. WANG Yuanjie, LIU Yongcheng, YANG Fuzeng, et al. Development and test of tiny remotely controlled electric tractor for greenhouses[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(22): 23-29. (in Chinese with English abstract)
[7] 谢斌,张超,毛恩荣,等. 基于myRIO的电动拖拉机驱动控制器设计与室内试验[J]. 农业工程学报,2015,31(18):55-62. XIE Bin, ZHANG Chao, MAO Enrong, et al. Motor controller design and indoor experiment for electric tractor based on myRIO[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 55-62. (in Chinese with English abstract)
[8] 朱镇,赖龙辉,王登峰,等. 油电混合机械液压式拖拉机动力系统节能性[J]. 农业工程学报,2022,38(17):52-60. ZHU Zhen, LAI Longhui, WANG Dengfeng, et al. Energy saving characteristics of the mechanical hydraulic tractor power system with oil electric hybrid power[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(17): 52-60. (in Chinese with English abstract)
[9] DU Y, HE Z F, ZHU X Y, et al. A novel pole-changing permanent magnet vernier motor[J]. IEEE Transactions on Industrial Electronics, 2022, 70(6): 6110-6120.
[10] LI F H, CHAU K T, LIU C H, Pole-changing flux-weakening DC-Excited dual-memory machines for electric vehicle[J]. IEEE Transactions on Energy Conversion, 2016, 31(1): 27-36.
[11] 杨玉波. 变极永磁同步电机的研究[D]. 济南:山东大学,2007. YANG Yubo. Research of Pole-Changing Permanent Magnet Synchronous Motor[D]. Jinan: Shandong University, 2007. (in Chinese with English abstract)
[12] TSUNEO K, TAKANOBU I, TOSHIHIRO S, et al. A wide constant power range vector-controlled ac motor drive using winding changeover technique[J]. IEEE Transactions on Industry Applications, 1991, 27(5): 934-939.
[13] MOHAMED O, THOMAS A L. Modeling and analysis of a wide-speed-range induction motor drive based on electronic pole changing[J]. IEEE Transactions on Industry Applications, 1997, 33(5): 1177-1184.
[14] GE B M, SUN D S, WU W L, et al. Winding design, modeling, and control for pole-phase modulation induction motors[J]. IEEE Transactions on Magnetics, 2013, 49(2): 898-911.
[15] PHANI K C, VENU S, SACHIN J. Gradual electronic pole changing technique to minimize the circulating currents during pole/mode transition in induction motor drive[J]. IEEE Transactions on Industry Applications, 2023, 59(1): 959-969.
[16] 杨家强,高健,黄进. 多相感应电机指数响应电子变极方法研究[J]. 中国电机工程学报,2013,33(27):105-111. YANG Jiaqiang, GAO Jian, HUANG Jin. Electronic pole-changing methods of multiphase induction motors based on exponent response[J]. Proceedings of the CSEE, 2013, 33(27): 105-111. (in Chinese with English abstract)
[17] YANG J Q, YIN R S, ZHANG X J, et al. Exponential response electrical pole-changing method for a five-phase induction machine with a current sliding mode control strategy[J]. Frontiers Information Technology Electronic Engineering, 2017, 18(8): 1151-1166.
[18] 杨公德,李捷,周杨忠,等. 变极永磁电机研究综述与展望[J]. 中国电机工程学报,2021,41(S1):303-314. YANG Gongde, LI Jie, ZHOU Yangzhong, et al. Overview and prospect of pole-changing permanent magnet machines[J]. Proceedings of the CSEE, 2021, 41(S1): 303-314. (in Chinese with English abstract)
[19] DU Y, MAO Y, XIAO F, et al. A pole-changing doubly salient permanent magnet motor[J]. IEEE Transactions on Transportation Electrification, 2022, 8(2): 2479-2849.
[20] 程明,文宏辉,花为,等. 电机气隙磁场调制统一理论及其典型应用[J]. 中国电机工程学报,2021,41(24):8261-8283. CHENG Ming, WEN Honghui, HUA Wei, et al. General airgap field modulation theory for electrical machines and its typical applications[J]. Proceedings of the CSEE, 2021, 41(24): 8261-8283. (in Chinese with English abstract)
[21] HOU Q K, DING S H, YU X H. Composite super-twisting sliding mode control design for PMSM speed regulation problem based on a novel disturbance observer[J]. IEEE Transactions on Energy Conversion, 2020, 36(4): 2591-2599.
[22] 张学军,李茜,朱兴亮,等. 基于自抗扰-动态矩阵的油葵联合收获机脱粒滚筒转速控制[J]. 农业工程学报,2019,35(15):9-16. ZHANG Xuejun, LI Qian, ZHU Xingliang, et al. Rotational speed control of threshing cylinder of oil sunflower combine harvester based on active disturbance rejection controller-dynamic matrix predictive[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(15): 9-16. (in Chinese with English abstract)
[23] 陈学深,方贵进,马旭,等. 基于线性自抗扰的稻田除草对行控制系统设计与试验[J]. 农业工程学报,2020,36(6):19-27. CHEN Xueshen, FANG Guijin, MA Xu, et al. Design and experiment of control system for weeding alignment in rice field based on linear active disturbance rejection control[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(6): 19-27. (in Chinese with English abstract)
[24] 姜海勇,姜文光,邢雅周,等. 果园巡检机器人长臂抖动抑制方法[J]. 农业工程学报,2021,37(17):12-20. JIANG Haiyong, JIANG Wenguang, XING Yazhou, et al. Suppression method for the long flexible arm vibration of orchard inspection robots[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(17): 12-20. (in Chinese with English abstract)
[25] 黄大山,张进秋,刘义乐,等. 车辆悬挂系统自抗扰控制器改进及其性能分析[J]. 农业工程学报,2017,33(2):61-72. HUANG Dashan, ZHANG Jinqiu, LIU Yile, et al. Improved active disturbance rejection controller on suspension system and its performance analysis[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(2): 61-72. (in Chinese with English abstract)
[26] 耿强,李亮,周湛清,等. 双永磁电机系统扰动转速同步控制[J]. 中国电机工程学报,2021,41(19):6787-6796. GENG Qiang, LI Liang, ZHOU Zhanqiang, et al. Speed synchronization control of disturbance rejection of dual-PMSM system[J]. Proceedings of the CSEE, 2021, 41(19): 6787-6796. (in Chinese with English abstract)
Electronic pole-changing strategy and analysis for PC-DSPM motor in electric tractors
DU Yi1, SUN Xu1, SUN Yandong2, XIAO Feng1※, ZHU Xiaoyong1, MAO Yi1, YAN Xukang1
(1.,,212013,; 2.,211100,)
Benefiting from driving by an electric motor, an electric tractor is one of the most effective means to realize green agricultural production with high efficiency, zero emission, and low noise. The field and road operating conditions can usually occur in electric tractors. Specifically, the typical speed of the former is 2-7, and 7-10 km/h, whereas, the latter is mainly used in the condition of transportation with the speed of 20-35 km/h. The speed of an electric tractor can be in the discrete form in the very wide range of speed regulation. In this study, a pole-changing doubly-salient permanent magnet (PC-DSPM) motor was proposed using the PC operation. Different output characteristics were also obtained to meet the special operation of electric tractors. The working components were firstly selected as the 2, 4, 10, and 16 pole-pairs harmonics with the higher amplitude, according to the general air-gap field modulation. Then, four working harmonics were divided into two groups, in terms of the slot pitch angles. As such, the coil electromotive force (EMF) phasor graphs under the working harmonics of Group 1 were totally different from that of Group 2, in order to achieve the PC operation using different winding connections. Three kinds of armature winding connections were then designed using the coil EMF phasor graphs. Thus, three operating modes of the PC-DSPM motor were achieved to select one or two groups of working harmonics in the electromechanical energy conversion using the filtering effect of armature winding. Two PC switching points were determined in the constant power region with the mechanical characteristic curves of the PC-DSPM motor under three modes. The motor speed was divided into low (0-920 r/min), medium (920-1 250 r/min), and high speed (1 250-3 900 r/min). In terms of the gear-box with a fixed ratio of 18 and the wheels with a diameter of 0.8 m, the speeds of electric tractors in the three modes were 0-7.7, 7.7-10.5, and 10.5-32.7 km/h, respectively, in order to meet the speed demands of field and road operations. Furthermore, an electronic PC method was proposed to change the current angles and the armature winding connection for continuous PC operation. Two sets of three-phase windings were controlled by a six-leg inverter under the dual three-phase control theory. The current angle in each coil was then controlled independently. Active disturbance rejection control (ADRC) was designed in the current loop of the control system for the PC-DSPM motor. The real-time disturbance was reduced and then suppressed during the PC process. In addition, a tracking differentiator (TD) was also used to arrange the switching of the current angle. The current was smoothed without overshoot after arrangement. The simulation and experimental analysis of the PC-DSPM motor were performed at the first PC switching point (920 r/min, 4.75 N·m), and the second one (1 250 r/min, 3.4 N·m). The operation transitions were shifted from mode Ⅲ to Ⅱ, and the mode Ⅱ toⅠ in the PC-DSPM motor under the current phase. The performances during TD-based electronic PC operation using ADRC were compared with the traditional step response. The current loop of the latter also adopted the ADRC strategy, indicating the better performance of TD electronic PC. The results showed that during the PC processes at the first switching points, although the PC transient time were prolonged to 400 ms when the tracking differentiator electric PC strategy was adopted, the switching of current in-axis presented a smooth trend from 3.6 and 3 A to 4.6 and 0.2 A, and current in-axis also presented a smooth trend from 2.7 and 3.2 A to 1.5 and 4.7 A. Similarly, the PC transient time were prolonged to 600 ms when the tracking differentiator electric PC strategy was adopted at the second PC switching point, but the switching of current in-axis presented a smooth trend from 4.2 and 1.2 A to 0.2 and 4.2 A, and current in-axis also presented a smooth trend from 0.2 and 4 A to 4 and 0.2 A, respectively, so that the torque ripple of PC-DSPM motor were reduced 8.5% and 11.8%, respectively, compared with those of the step PC method. Thus, the speed of motor can be stable at 920 and 1 250 r/min. The research provided a better solution to expend speed range for field operations and road operations of electric tractors and realize a smooth PC switching of PC permanent magnet motors.
tractor; permanent magnet motor; electronic pole-changing; six-leg inverter; tracking differentiator
2022-12-12
2023-03-24
国家自然科学基金项目(52177045);江苏省农业科技自主创新资金项目(CX(21)3147);江苏高校优势学科建设工程(三期)资助项目(PAPD-2018-87)
杜怿,博士,教授,研究方向为特种电机系统设计与分析。Email:duyie@ujs.edu.cn
肖凤,博士,高级实验师,研究方向为特种电机系统设计与分析。Email:xiaofeng@ujs.edu.cn
10.11975/j.issn.1002-6819.202212084
S219.4,TM351
A
1002-6819(2023)-08-0044-10
杜怿,孙旭,孙延东,等. 电动拖拉机PC-DSPM电机电子变极策略与分析[J]. 农业工程学报,2023,39(8):44-53. doi:10.11975/j.issn.1002-6819.202212084 http://www.tcsae.org
DU Yi, SUN Xu, SUN Yandong, et al. Electronic pole-changing strategy and analysis for PC-DSPM motor in electric tractors[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(8): 44-53. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.202212084 http://www.tcsae.org
