公路半幅封闭施工区交通冲突识别技术研究
2023-07-27廖原
廖原
摘要 基于工程案例,梳理介绍所应用的半幅封闭施工区交通冲突识别技术,介绍了交通冲突识别判断方式、基于接触角度的交通冲突类别。从交通冲突识别指标、计算过程等方面,介绍了半幅封闭施工区的交通冲突的识别操作过程、主要技术点以及最终形成的识别成果,对同类交通冲突识别工程应用有参考意义。
关键词 公路施工;半幅封闭;施工区交通;冲突识别;技术研究
中图分类号 U491文献标识码 A文章编号 2096-8949(2023)13-0063-03
0 引言
交通安全受到威胁的状态即为交通冲突状态,交通冲突严重突破发展,紧接而来的是交通事故[1]。为了及时识别交通冲突,有的放矢地提供避险措施,最大限度地消除冲突,保证交通安全,人们探讨开发了交通冲突科学分析技术,这是一种非事故分析技术,具有小区域、短周期、大样本、高信度、应用统计学又基于科学计算的特点。案例高速公路扩改建工程在半幅封闭施工区交通冲突控制中应用该识别技术。这里以工程应用为背景,梳理介绍相关交通冲突识别技术要点,以为同类半幅封闭施工区交通冲突识别应用提供技术参考。
1 案例简介
华东某高速公路全长309.20 km,原四车道服役23年后,经双侧拼宽扩建成八车道,扩改建总投资297.96亿元。该高速公路是连接地区两座大城市的重载交通大动脉,扩改建工程如何保证旧路运行和改建施工两不误,成为工程难点之一。为此工程采取半幅封闭施工方式,为保证半幅封闭施工区和在运行线路的交通安全,工程采取交通冲突控制技术,加强交通冲突识别,发现隐患超前采取控制措施。
2 交通冲突识别判断方式
2.1 基于规避行为的识别判断方式
当两辆车中至少一辆采取了防碰撞规避动作时,就识别为存在交通冲突。这种识别概念强调了车辆间的规避行为,即车辆为了避免碰撞而采取的行动。该方的优势是方法直观,可以通过观察车辆驾驶状态判定交通冲突是否存在,在早期缺乏先进数据采集设备时,这种方法比较适用。但是这种方法也存在一些缺点:首先在观测时很难精确地判别车辆是否处在规避行为;其次判别方式无法对交通冲突的严重程度进行准确判断;再是观测时容易将正常的降速、换道行为误判为交通冲突。
2.2 基于时空间状态的识别判断方式
当车辆在空间和时间上相互接近到一定程度,如果不立即改变运动状态就要产生碰撞或剐蹭,则识别判断为存在交通冲突。其主要判断指标有3种:距离度量指标、速度度量指标和时间度量指标[2]。這些指标可以用来计算交通参与者之间的距离、速度和时间等参数,并以此来判断是否存在交通冲突。
3 半幅封闭施工区的冲突识别
3.1 交通冲突识别指标
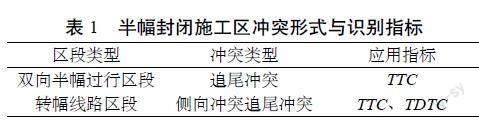
在进行交通事故指标的筛选之前,需要先分析各种常用交通事故识别指标的特点和适用条件。半幅封闭施工区可分转幅线路区段及双向半幅过行区段,二者的道路和流量特性存在比较大的区别,路段驾驶行为也有所差别,区段交通冲突表现状态也有所不同。相关冲突形式,和识别指标如表1所示。
下面将详细介绍双向半幅过行、转幅线路区段识别交通冲突指标算法。
3.1.1 双向半幅过行区段
通过实地采集数据发现,常规的双向半幅过行区段中,车辆的行驶特性主要是跟驰行驶,发生的冲突主要是追尾冲突[3]。因此在双向半幅过行区段中,选择TTC作为冲突判别指标。
式中,vA和vB——A车和B车的速度(m/s);lAB——A车与B车间的距离(m)。公式(1)为双向半幅过行段车辆TTC(s)的计算公式。
3.1.2 转幅线路区段
在转幅直线段,车辆多处在跟驰状态,冲突多为追尾冲突,因为TTC擅长于识别追尾冲突,因此采用该指标进行冲突判断。曲线段车辆呈“S”形轨迹,冲突多属于侧向冲突,而TDTC擅长于识别侧向冲突,因此在转幅区段以TDTC来识别判断交通冲突。
两车均处于直线区段,以公式(2)计算两车的TTC(s)指标。
(2)
式中,TA——A车到达M冲突点所需时间(s);vA——A车在r时点的瞬间速度(m/s);sA——A车在r时点距M冲突点的距离(m):TB——B车到达M冲突点所需时间(s),vB——B车在r时点的瞬间速度(m/s?),sB——B车到达M冲突点的距离(m),当两车无M交点时则两车不存在冲突。当存在一车或者两车均位处曲线段时,以公式(2)计算两车的TDTC(S)值。
3.2 交通冲突识别计算
基于前述冲突识别算法和雷达观测交通数据,通过计算机开展交通冲突识别计算。
第1步:原始CSV格式数据导入,将其转换为DataFrame格式。同时需要读取各帧下车辆编号、位置方向坐标以及速度等信息。
第2步:根据车辆坐标选择适当的冲突识别指标。在该例中,K130+800系转幅线路路段,曲线区段的X坐标范围为52~153 m。具体的计算方法如下:当两辆车中至少有一辆车的X坐标位于52 ~153 m之间时,应该计算两辆车之间的TDTC值;当两辆车的X坐标均小于52 m或均大于153 m时,应该计算两辆车之间的TTC值。
第3步:TDTC与TTC值计算
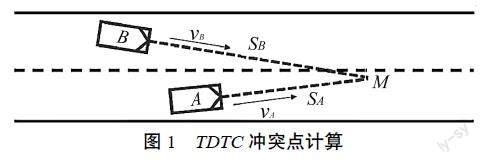
(1)计算TDTC值。在读取数据后,可以将每辆车抽象为一个点,并根据车辆的X和Y速度计算出车辆的行驶方向,然后可以得到两辆车的轨迹延长线,并利用初等几何的求解法,根据两条直线的一般式(形如Ax+By+C=0)求出两条延长线的交点坐标。这个交点坐标即为交通冲突点的坐标,而TDTC则是两辆车到达冲突点的时间差。这个过程如图1所示。
式中,XM——M点的X坐标;YM——M点的Y坐标;XA——A车在该时点的X坐标;XB——B车在该时点的X坐标;YA——A车在该时点的Y坐标;YB——B车在该时点的Y坐标;vAs——该时点A车在X向的速度(m/s);vBs——该时点B车在X向的速度(m/s);vAy——该时点A车在Y向的速度(m/s);vBy——该时点B车在Y向的速度(m/s)。
算得冲突点的坐标以后,然后计到M冲突点的距离:
式中,SA——冲突点与A车的距离(m);SB——冲突点与B车的距离(m)。
最后进行TDTC(S)计算,其公式如下:
式中,TDTC——交通冲突识别指标(S);sA——冲突点到车辆A的距离(m);sB——冲突点到车辆B的距离(m);vA——A车的速度(m/s);vB——B车的速度(m/s)
以第5 901帧的TDTC为例进行计算,冲突点的延长线方程如下:
经公式(8)和公式(9)算得M冲突点在(96.435 5,?0.760 3),其TDTC值为1.23。
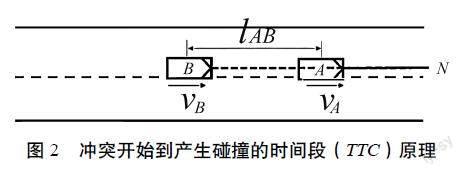
(2)计算TTC值。如果在当前时点下,后车的速度大于前车的速度,并且两辆车保持原行驶轨迹和速度不变,那么它们将在某个时点产生碰撞。在这种情况下,从交通冲突开始到产生碰撞的时间段就是TTC,如图2所示。
在图2中,根据TTC原理可以得知,如果A、B两辆车保持当前的速度和行驶轨迹不变,那么它们将在经过一段时间T后,在N点产生碰撞事故。
式中,vA——A车即时速度(m/s);vB——B车即时速度(m/s);T——TTC值(s)。
由公式(12)获得TTC计算公式:
式中,lAB——两车间的直车距(m);vA——A车即时速度(m/s);vB——B车即时速度(m/s)。
在计算分析中,首先需要读取车辆位置和车速信息,然后计算后车轨迹延长线至前车即时位置之间的最短距离。如果这个距离>1.80 m,则说明两辆车在異车道行驶,不需要计算TTC值;如果这个距离<1.80 m,则说明两辆车在同车道行驶,应该计算它们之间的TTC值。通过计算,可以获得两辆车之间的即时TDTC或TTC值,利用这些值可以确定两辆车是否发生了交通冲突。
3.3 交通冲突识别结果
计算获得双向半幅过行区段和转幅线路区段的严重交通冲突识别结果见图3所示。
图3柱图显示,车辆在转幅线路区段产生严重交通冲突的概率高于双向半幅过行区段,这主要是因为转幅线路区段的道路状况较差,同时存在“S”区段,通行能力比较低,车辆之间的车头时距较小,并且车辆需要2次调整方向经过该区段。
根据交通量识别分析的车辆交通冲突数据显示,车辆在转幅线路区段产生严重交通冲突的概率大于双向半幅过行区段。但是,在200~600 pcu的交通流量范围内,增加交通流对交通冲突均没有明显影响。
根据行车速度识别分析的车辆交通冲突如数据所示,在双向半幅过行区段与转幅线路区段,产生严重交通冲突的概率随着车速的增加而上升,足见车速对交通冲突存在显著影响。
4 结语
案例高速公路扩改建工程采取半幅封闭施工方式,为保证半幅封闭施工区和在运行线路的交通安全,工程采取交通冲突识别技术。基于工程应用,①梳理介绍了交通冲突识别判断方式,即基于规避行为的识别判断方式和基于时空间状态的识别判断方式;②介绍了交通冲突类别,从接触角度考察,交通冲突可以分为车头相撞的正向冲突、后车追撞前车的追尾冲突、剐蹭或侧碰撞的侧向冲突等3种类型;③介绍了TTC值、TDTC值计算过程、施工区的交通冲突阈值确定过程以及半幅封闭施工区的冲突识别成果。交通冲突识别是一种非事故性、超前性的冲突识别方式,具有小区域、短周期、大样本、高信度、应用统计学又基于科学计算的特点,工程实用性明显。
参考文献
[1]饶湘儒. 高速公路施工区交通组织优化研究[D]. 重庆:重庆交通大学, 2020.
[2]杨晨煊. 高速公路改扩建施工区驾驶行为与设施设置关系研究[D]. 西安:长安大学, 2019.
[3]金建竖. 高速公路施工区半幅封闭施工组织技术研究[D]. 重庆:重庆交通大学, 2021.