微型智能气象站降雨观测对比试验
2023-07-26王振超陈雪娇花家嘉刘文忠
王振超 陈雪娇 刘 姝 花家嘉 刘文忠
1)(中国气象局雄安大气边界层重点开放实验室, 雄安新区 071000)
2)(河北雄安新区气象局, 雄安新区 071000)
3)(河北省气象技术装备中心, 石家庄 050021)
引 言
降雨观测数据是开展灾害性天气监测预警预报、气候变化、汛情旱情分析的重要基础数据,始终是气象观测的重点[1-2]。目前国家级气象观测站使用翻斗式雨量传感器和称重式降水测量仪对地面降水量(液态和固态)进行自动观测[3-5]。在气候变暖和城镇化加速的背景下,区域性极端暴雨洪涝灾害频发[6-11],这对城市气象灾害监测服务提出严峻挑战,也对气象降雨精细化观测提出了更高要求[12-15]。2020年中国气象局印发了《气象观测技术试验指南》,明确未来5年气象观测技术试验以监测精密为总体要求,建设密度较高、布局合理和自动化程度高的地面探测网,提高城市气象观测能力。
微型(一体式)智能气象站(简称微智站)是集气象数据自动采集、存储和传输于一体的全电子新型小型气象站,可依托智能建筑、地下空间、公共场所和智能灯杆等场所设施,在重点地区科学而广泛地布设微智站,形成智慧气象精密观测网,获取区域高时空分辨率的中小尺度灾害性天气、局部环境和区域气候等观测数据,大幅有效提升城市气象综合观测能力[16-18]。
综上可知,微智站在未来智慧城市降雨精细化观测中具有广泛应用前景,但目前微智站在气象降雨观测业务应用的可行性尚不清楚。近年关于微智站降雨观测性能开展了一些研究。胡新华等[19]对比智能气象站与自动气象站降雨资料,指出虽然两种观测数据存在差异,但均在允许精度范围内。吴有恒等[20]分析多要素自动气象站的降雨资料,指出微智站观测的过程雨量偏小,降雨过程的等级越大与标准站数据间的偏差越小。鲁峻麟等[21]对4套微型气象站数据进行了评估。但这些对比研究涉及设备类型单一,且评估多针对降雨总量,未综合比较基于多种测雨原理的微智站降雨特性差异及其原因,不同测雨原理的微智站各有所长,实际使用时可以根据不同测雨需求组合雨量计或优化开发新的测雨设备。2021年6—11月河北雄安新区气象局依据《气象观测技术试验指南》开展了不同厂家的多种类型微智站降雨观测对比试验。本文利用此次试验的观测数据,从雨量和雨强占比以及降雨时间等方面分析不同测雨原理的微智站对降雨的观测能力,旨在为微智站应用于气象降雨观测业务的可行性提供支撑依据,增强对微智站降雨监测性能的认识,有助于科研业务人员根据不同需求选择合适的测量设备获取降雨特性。
1 外场对比观测试验方法
1.1 微智站简介及试验场地布设
为评估各种微智站的降雨监测性能,在河北雄安新区雄县气象局地面气象观测试验基地内布设了12个型号、6类雨量测量方式的微智站(表1)。其中,6台雷达式原理测雨,1台压电式原理测雨,1台光电式原理测雨,2台双翻斗式原理测雨,1台单翻斗式原理测雨,1台电阻式原理测雨。各微智站东西排列成行、南北布设成列,东西相距3 m,南北相距2 m,安装高度均为2 m。另外观测场内安装1台口径为20 cm的SL3-1型翻斗式雨量传感器接入DZZ4自动气象站作为标准站进行对比(图1),同时布设1台人工雨量器用于收集降雨时段的雨量验证标准站测量准确性。微智站及标准站测雨的频率是每分钟采样1次,人工雨量器收集的降雨每日人工定时观测3次,读数精确到0.1 mm。外场对比试验中2021年6月15日08:00—10月15日08:00(北京时,下同)出现降水,试验期内全部为液态降水,无固态或混合态降水。

图1 微型站外场对比试验场地布设示意图Fig.1 Schematic layout of comparison experiment for micro-smart weather stations
1.2 雨量传感器测量原理
本次外场试验涉及6类降雨观测原理。雷达式测雨基于多普勒频移,雷达模块发送侧连续发送脉冲式电磁波,当雨滴进入雷达模块的采集区域,电磁波遇到雨滴被散射,雷达模块的接收侧采集多普勒频移信息,通过对信息的频率和幅度进行识别,计算单个雨滴的直径及下落速度,得到归一化的雨强,进而计算雨量。雨强的估算公式:
(1)
式(1)中I为雨强,A为快速傅里叶变换(FFT) 后的信号幅度,f为频率,K为试验测试确定的参数,N为FFT点数[22-24]。
压电式测雨是利用压电振子的压电效应,将机械位移(振动)变成电信号,雨滴冲击能量转变的电压波形,由电压波形的变化得到雨强,测算单个雨滴质量,进而计算雨量[25-26]。
光电式测雨是通过将光强度的变化转换成电信号的变化实现测量。当雨滴进入采样空间时,雨滴遮挡激光,接收传感器接收到的光信号和由光信号转变的电信号发生改变,当雨滴穿过后,接收传感器的电信号又恢复雨滴进入采样空间之前的状态。对接收传感器的电信号进行处理,得到雨滴穿过采样空间的时间,进而可计算雨滴的下降速度和雨强[27-28]。
翻斗雨量传感器主要由承水器、上翻斗、汇集漏斗、计量翻斗、干簧管等组成。双翻斗式雨量传感器的承水器将收集的雨水通过漏斗进入上翻斗,积累到一定量时,重力作用使上翻斗翻转,雨水进入汇集漏斗。雨水从汇集漏斗的节流管注入计量翻斗,通过调节降雨强度降低因不同降水强度造成的测量误差。当计量翻斗的雨量为0.1 mm时,将降雨倾倒入计数翻斗,计数翻斗翻转1次。计数翻斗翻转时,相关的磁钢对干簧管扫描1次,干簧管因磁化瞬间闭合1次。降水量每达到0.1 mm,对开关信号计数,即测得分辨力为0.1 mm的降水量。与双翻斗式雨量传感器相比,单翻斗式雨量传感器少了上翻斗、汇集漏斗。承水器的雨水经过滤后流入计量翻斗,当计量翻斗的雨水积累到一定量时,翻斗翻转,每次翻转通过干簧管转成脉冲信号(1脉冲为0.1 mm)传输至采集系统[29]。
电阻感雨式雨量传感器的工作原理是雨点落在感应面,通过电信号判断是否有雨,一般设计为辅助降水观测传感器。
1.3 分析方法
1.3.1 雨量误差分析方法
对于降雨总量的误差分析一般分为日雨量和过程雨量,为避免跨日界及滞后降雨引起的雨量误差[30-31],本文的雨量误差分析采用过程雨量方式。目前,对于降雨过程的划分多采用 1 h,3 h,6 h,12 h,24 h[32-37]或最小降雨间歇期[38-39]。本文采用24 h作为最小降雨间歇期划分降雨过程,即标准站记录的0.1 mm分辨力数据出现第1次计数和最后1次计数的降雨间歇时间不能超过24 h,否则认为该次降雨过程结束。降雨过程的时间记录精确到分钟,开始时间为T1,结束时间为T2。通过人工雨量器和标准站的对比确定标准站运行正常,2021年6月15日—10月15日共得到22次降雨过程(表2),总雨量为552.6 mm。微智站降雨过程的开始和结束时间与标准站略有不同,因为雷达式和光电式微智站的雨强计量为0.01 mm·min-1,为了更精确地测量微智站的过程雨量,参照廖爱民等[40]的处理方法,将(T1-12 h)和(T2+12 h)作为微智站降雨过程的开始时间和结束时间。
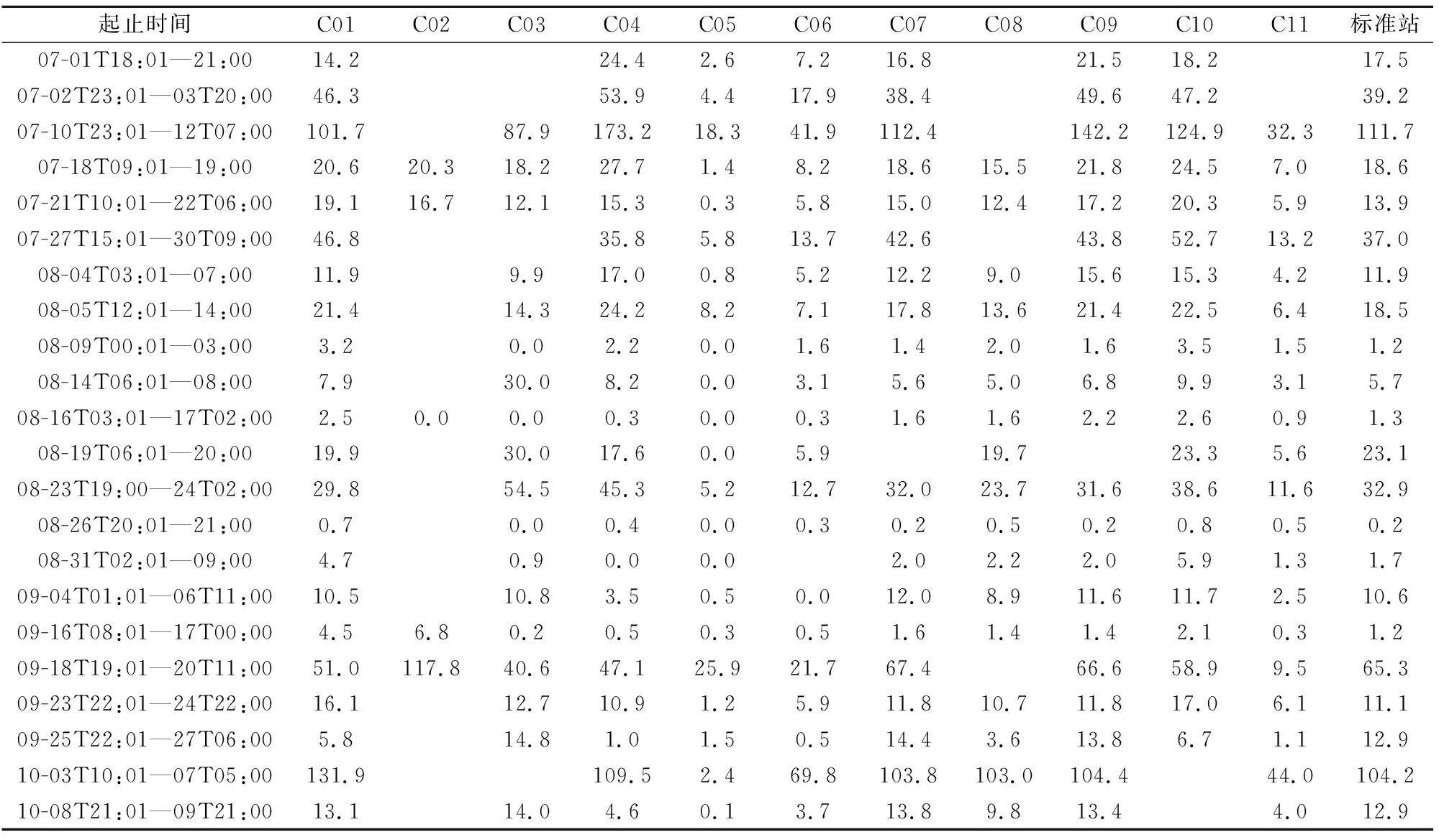
表2 2021年6月15日—10月15日降雨过程(单位:mm)Table 2 Rainfall events from 15 Jun to 15 Oct in 2021(unit:mm)
通过计算过程雨量的相对误差比较各类微智站与标准站的差异。相对误差是测量值与标准站真值的差值与真值之比,以百分数表示,反映测量值的可信程度[41]。相对误差计算公式为
(2)
式(2)中,xi为第i种型号微智站的过程雨量,y为标准站的雨量。为了排除断电、通讯故障或维护以及服务器重启等原因造成的数据缺测,舍去数据到报率小于98%的降雨过程。由于编号C00的微智站为电阻感雨式,观测数据为0和1,0表示无降雨,1表示有降雨,因此对该设备不予分析。
1.3.2 雨强占比
统计各微智站和标准站各降雨过程不同雨强占比Pi,为了更好地适应数据采集频率为1 min的降雨时间序列,以0.1 mm·min-1为分级步长,本文的雨强单位取mm·min-1[42-44]。
(3)
式(3)中,Ni和Nj分别为第i级和第j级雨强出现的次数。第i级雨强Ii的雨量在总雨量的占比qi为
(4)
1.3.3 降雨的时间特征
为比较不同类型微智站的降雨时长,对于标准站,在[T1,T2]获取的第1个和最后1个非零雨强的分钟级降雨数据时刻作为降雨的精确开始时间和结束时间,记为Th1,Th2。对于微智站,在[T1-12 h,T2+12 h]获取的第1个和最后1个非零雨强的分钟级降雨数据时刻作为降雨的精确开始时间和结束时间。下文采用精确开始时间Th1、结束时间Th2,降雨时长T、有效降雨时长Te和有效降雨率a分析降雨过程的时间特性。Te为[Th1,Th2]范围内非零雨强的总时间,单位为min。
T=Th2-Th1,
(5)
(6)
2 结果分析
2.1 降雨总量误差
图2为微智站雨量相对于标准站的相对误差率。为讨论微智站对不同雨强降雨的观测性能,将过程雨量分为不小于10 mm的较强降雨和小于10 mm 的弱降雨分别讨论[45]。由图2较强降雨可见, 对于较强降雨过程,多数微智站过程雨量的误差比较集中,微智站C03和C07的相对误差率在±4%误差控制线以内,说明这两种型号的微智站观测性能能够满足较强降雨的误差控制要求。6台雷达式微智站(C01,C02,C04,C08,C10和C11)的相对误差率超过±4%误差控制线,表明总体上雷达式微智站对较强降雨过程的雨量观测偏大,但微智站C08和C11的结果偏小,说明虽然观测原理相同,但不同算法和不同传感器硬件结构设计对观测性能的影响很大,因此开展外场试验并及时调整算法的参数和改善传感器的硬件结构设计十分必要。微智站C05和C06的相对误差率低于-4%的误差控制线,说明较强降雨过程的雨量低测明显。这可能与测雨原理有关,光电式测雨受光线以及杂物的影响很大(如多个大雨滴同时到达检测光区会产生重叠效应,造成雨量观测偏小),压电式测雨受压力感应面积大小的影响很大,因此在较强降雨过程中对不均匀雨束的观测会产生系统性偏差。微智站C09的相对误差率偏大,其原因可能是在较强降雨中,双翻斗式雨量传感器的下翻斗在惯性作用下盛水量减少,计数翻斗的翻动次数增加,甚至出现复翻现象,即因振动导致翻动1次产生2次计数。
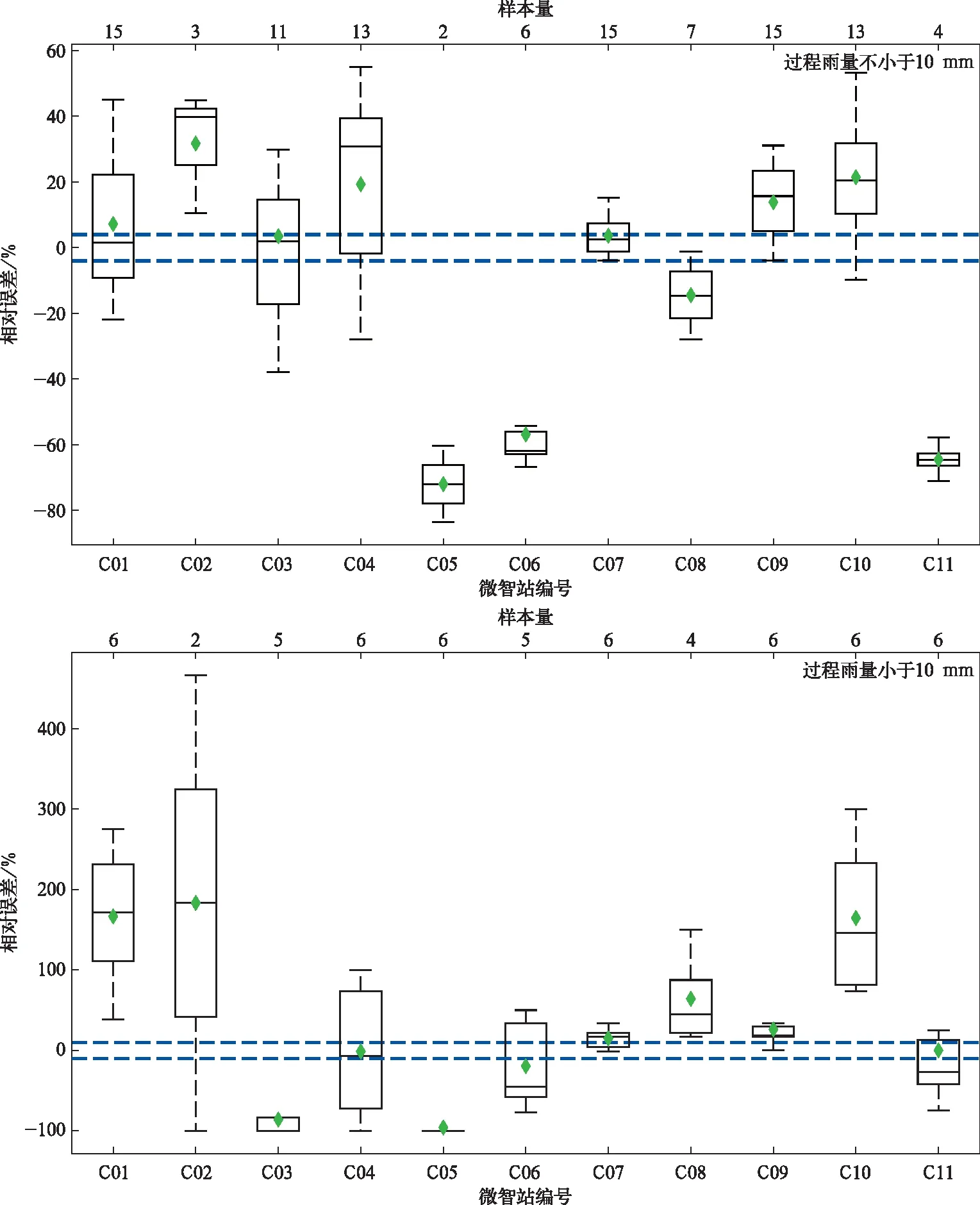
图2 微智站过程雨量相对误差箱线图(方框上边界和下边界分别表示总样本的75%和25%比例的数值,上下虚线端点分别表示最大值和最小值,方框中黑色横线表示中位数,绿色菱形表示平均值,蓝色虚线为±4%的误差线)Fig.2 Box plots of relative error for process precipitation of micro-smart weather stations(upper and lower boundaries of the box denote 75 and 25 percentiles,top and bottom ends of the whiskers denote the maximum and minimum,the black horizontal line inside the box denotes the median,green diamonds denote the mean,blue dashed lines denote ±4% of bias)
由图2较弱降雨可见,整体上各微智站观测的过程雨量相对误差较分散,表明微智站对较弱降雨的观测能力不稳定。雷达式微智站C04和C11过程雨量相对误差率在±4%的误差控制线以内,其他雷达式微智站过程雨量的相对误差率大于4%,说明相同观测原理但算法不同导致测雨结果差异很大。微智站C05的测雨结果小于标准站的4%,可能是小雨滴造成的光线遮挡不明显或者小雨滴重叠,导致雨量观测偏小。微智站C06的测雨结果接近标准站。微智站C07和C09的雨量相对误差率均在±4%的误差控制线以内,但微智站C03的雨量存在明显低测。
总体上,雷达式微智站对过程雨量的观测整体上偏大,雷达式微智站之间的对比表明不同算法和不同传感器硬件结构设计可造成观测结果差异很大,所以开展外场试验并及时调整算法,是提高雷达式微智站观测性能,满足业务要求不可缺少的工作。光电式微智站的测雨误差较大,压电式微智站适合较弱降雨过程的观测,双翻斗式微智站对过程雨量的观测整体上能够满足误差控制要求。
2.2 雨强差异
统计各微智站和标准站22次降雨过程不同降雨时长(1 min,5 min,10 min,30 min,1 h)的最大雨量,结果见表3。图3是22次降雨过程不同降雨时长最大雨量的误差散点图。结合表3和图3可见,微智站C02和微智站C04不同降雨时长的最大雨量误差均偏大,微智站C08和微智站C11不同降雨时长的最大雨量误差普遍偏小,以上4台微智站的误差随着统计时长增长而越大。两台雷达式微智站C01和C10的最大雨量误差离散度比其他雷达式微智站(C02,C04,C08和C11)小。微智站C05和微智站C06不同时长的最大雨量误差整体偏小,但误差的离散度较大。微智站C07不同时长的最大雨量误差较小。微智站C03和 微智站C09在1~10 min 的最大雨量误差较小,整体看优于雷达式、光电式以及压电式的微智站。
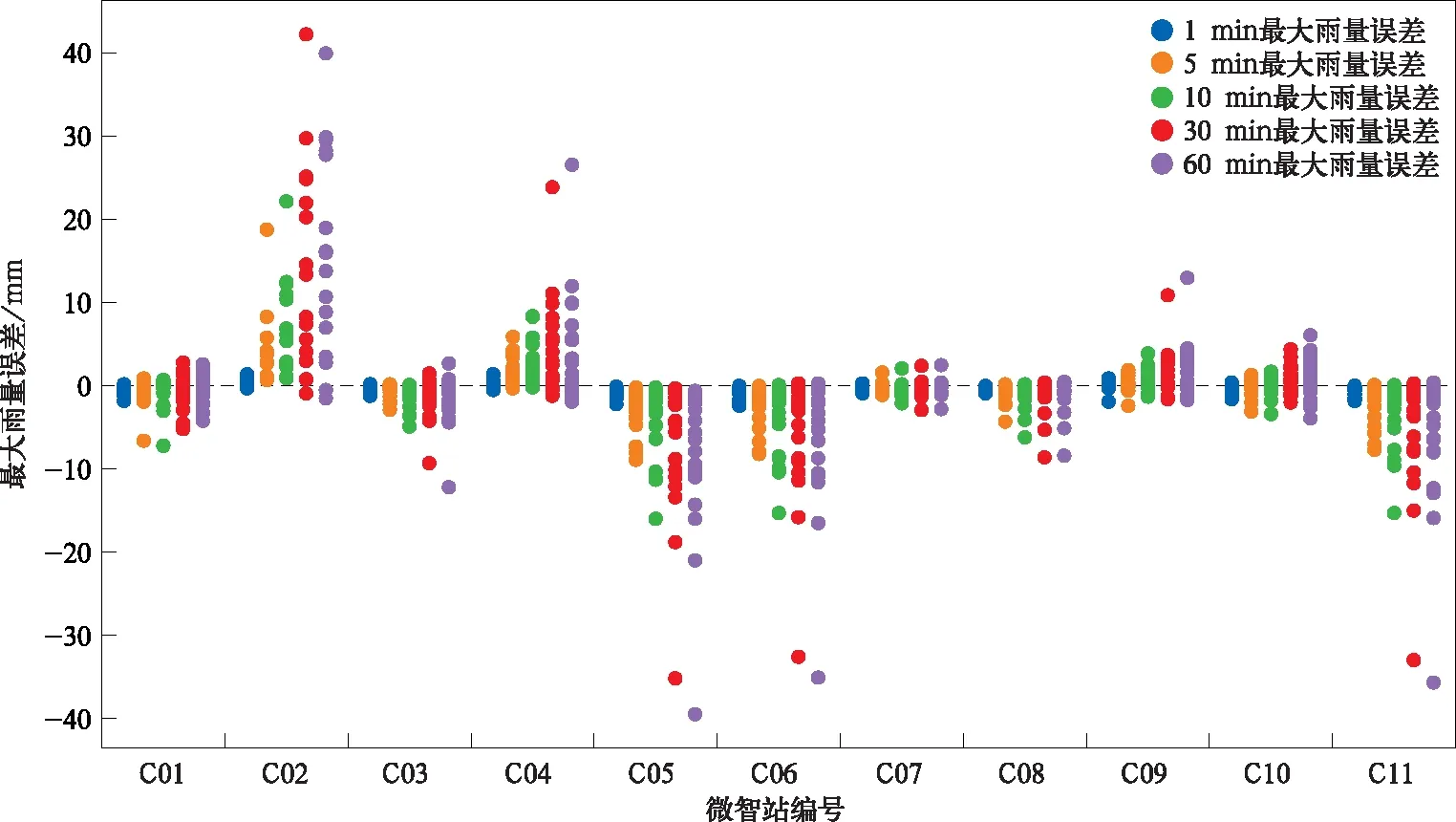
图3 不同降雨时长最大雨量的误差散点图Fig.3 Scatter plot of maximum rainfall bias at different duration
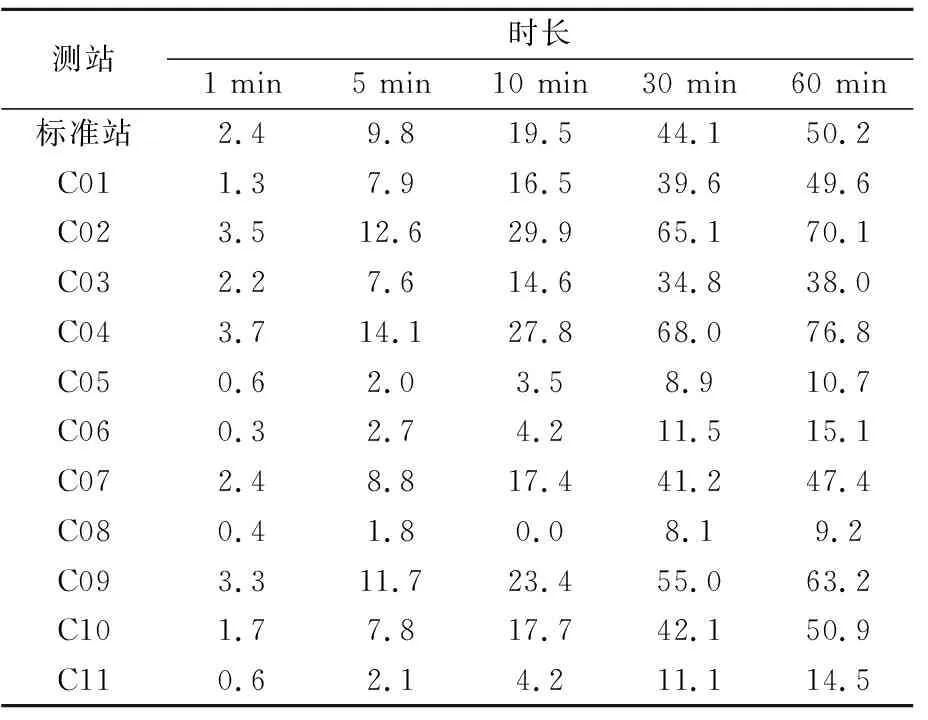
表3 标准站和微智站不同时长的最大雨量(单位:mm)Table 3 Maximum rainfall of standard and micro-smart weather stations at different duration(unit:mm)
综上可知,微智站C07适于降雨极大值的观测,微智站C01和C10内部算法的相关系数经订正后可用于观测降雨极大值,且订正后的观测性能将得到提升。微智站C05和C06因观测的降雨极大值偏小,不适于降雨极大值的观测。
2.3 降雨雨强占比
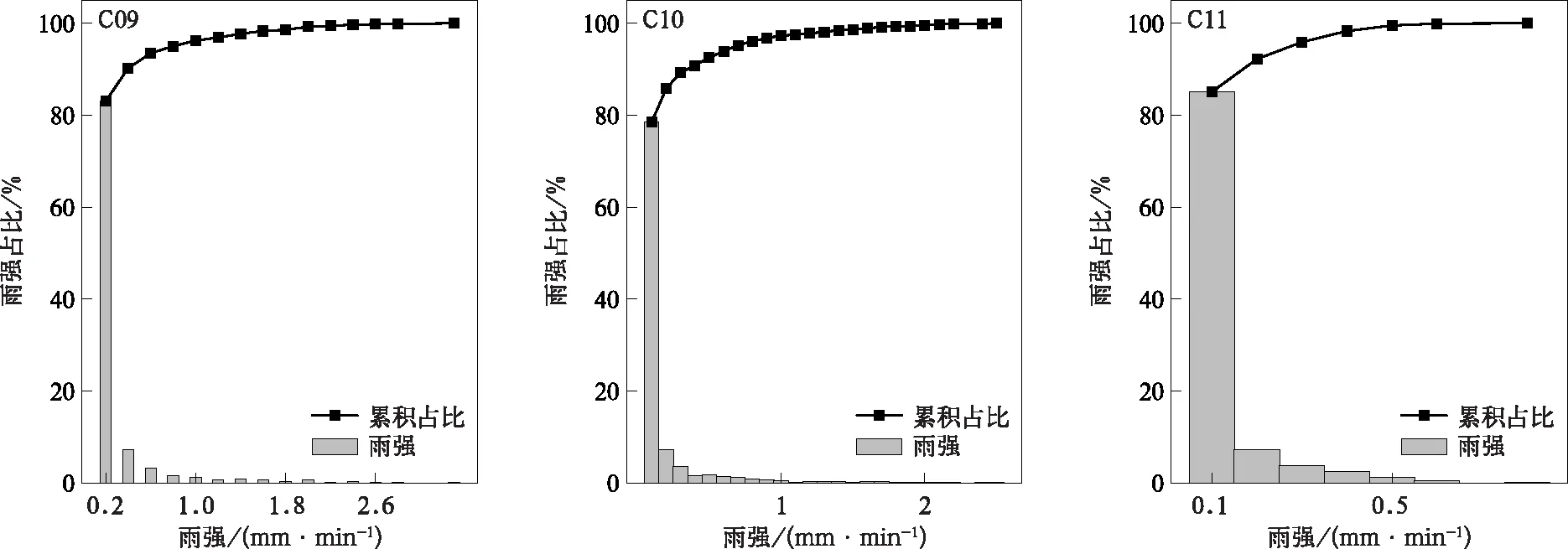
图4和图5分别是标准站和微智站各级雨强占比和各级雨强对雨量的贡献。由图4和图5可见,除微智站C07和微智站C09的最小雨强为0.2 mm·min-1外,其他微智站均能监测到不超过0.1 mm·min-1的雨强。标准站雨强不超过0.1 mm·min-1的占比为82.2%,对雨量的贡献为49.8%。微智站C01、微智站C05、微智站C06、微智站C08以及微智站C11雨强不超过0.1 mm·min-1的占比大于标准站,为83%~86%,对雨量的贡献相比标准站也偏大,分别为53.1%,65.4%,68.2%,67.5%和65.9%。微智站C02和微智站C04雨强不超过0.1 mm·min-1的占比和对雨量的贡献相比标准站偏小,分别为44.5%,21.0%和67.8%,27.1%。微智站C03和微智站C10雨强不超过0.1 mm·min-1的占比分别为73.3%和78.6%,但对雨量的贡献明显偏小,分别为34.5%和39.8%。微智站C07 和微智站C09雨强不超过0.2 mm·min-1占比分别为85.5%和83.1%,对雨量的贡献分别为60.2%和54.4%。

图4 标准站和微智站的雨强占比及其累积占比Fig.4 Proportion and accumulated proportion of rainfall intensity measured by standard station and micro-smart weather stations
续图4
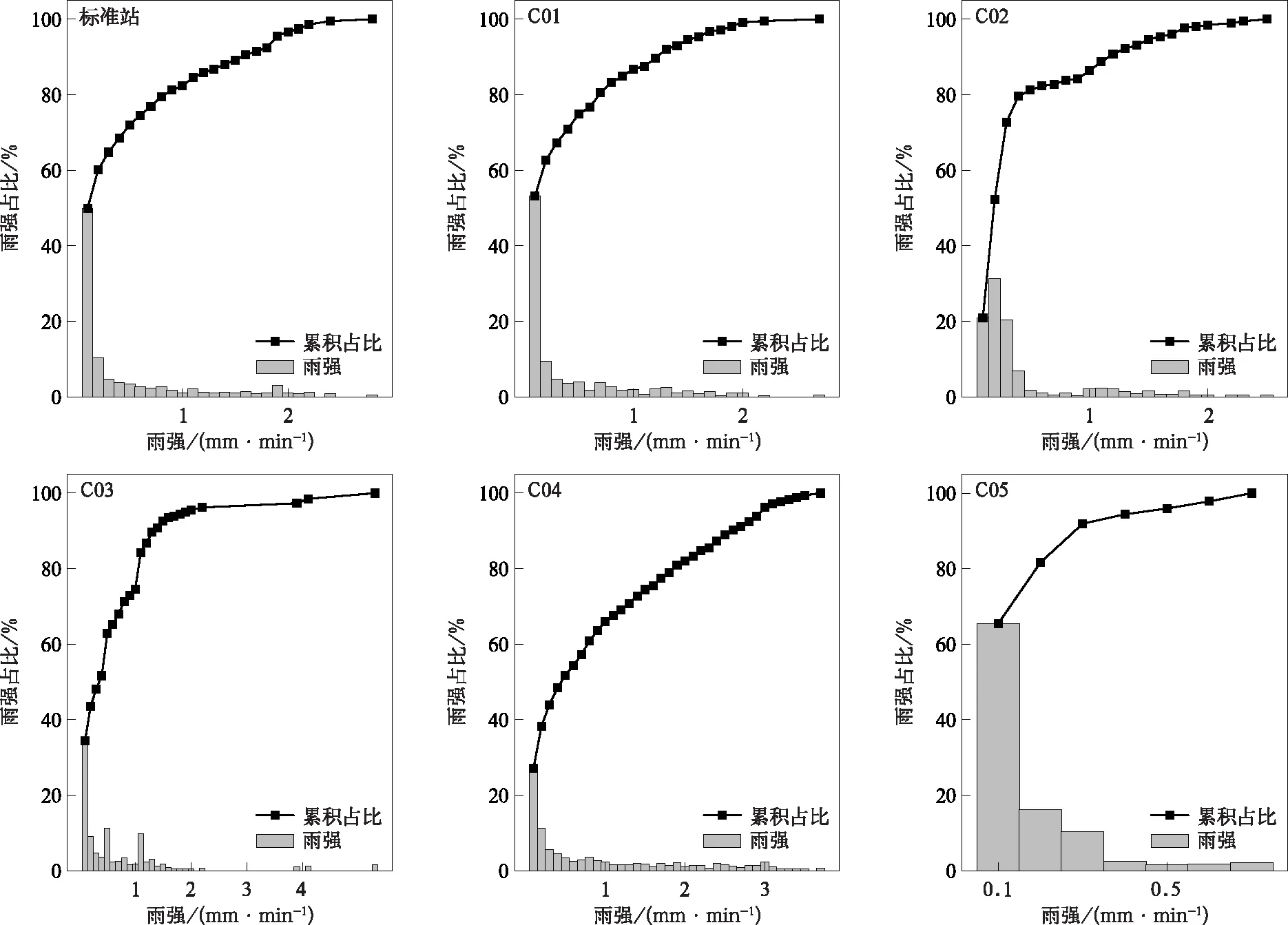
图5 标准站和微智站雨强对雨量的贡献及其累积占比Fig.5 Contribution and accumulated proportion of rainfall intensity to rainfall measured by standard station and micro-smart weather stations
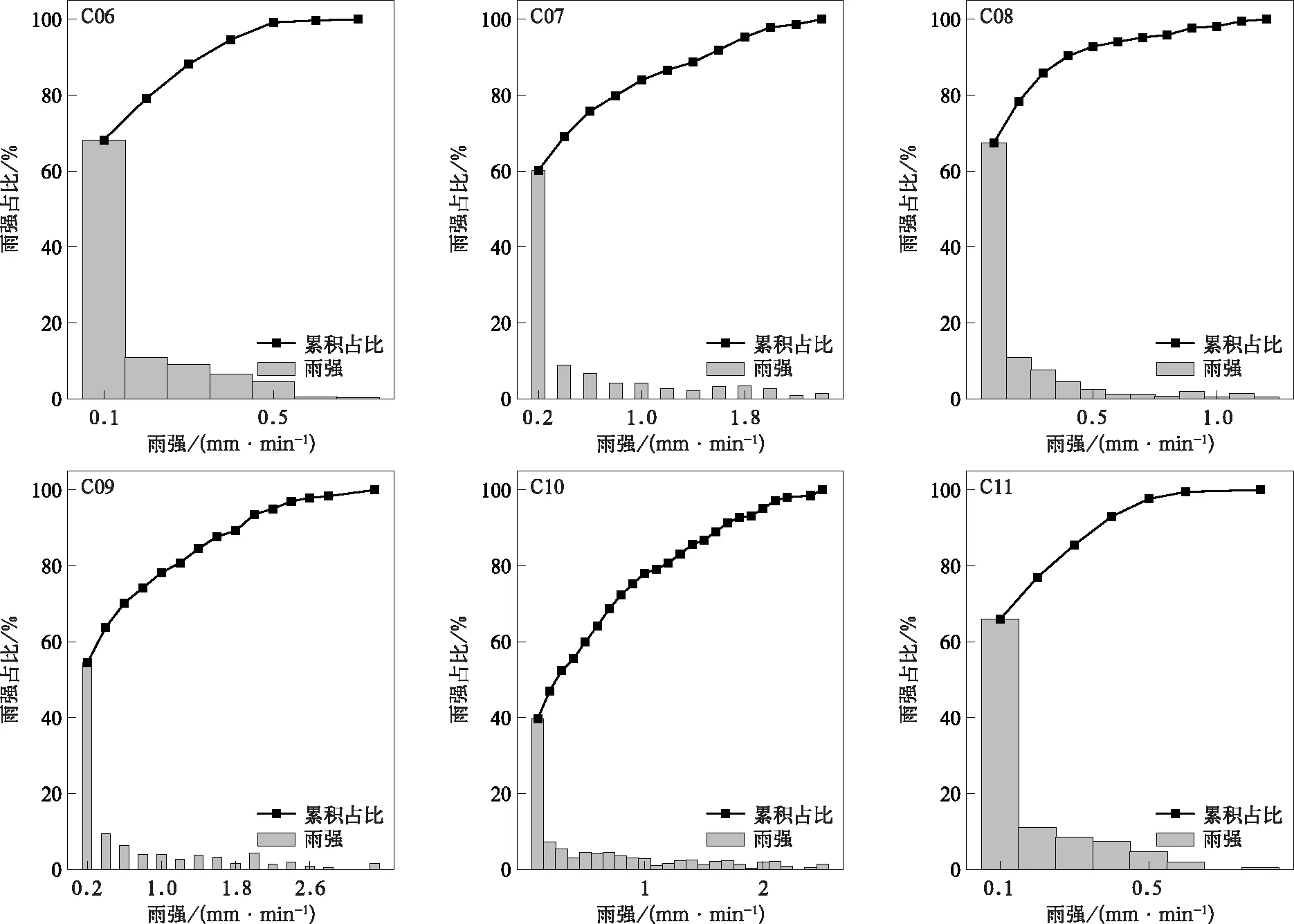
续图5
由图4和图5还可以看到,标准站雨强累积占比大于95%对应的雨强为0.5 mm·min-1,对雨量贡献累积占比大于50%对应的雨强为0.2 mm·min-1。 微智站雨强累积占比大于95%对应雨强为[0.3 mm·min-1,0.6 mm·min-1],对雨量贡献累积占比大于 50%对应的雨强为[0.1 mm·min-1,0.4 mm·min-1]。这表明对雨强不超过0.4 mm·min-1的降雨,所有微智站测得的降雨占比均可达到过程雨量的一半以上,故在业务上翻斗式雨量传感器率定中应更注重小雨强的观测准确性,如考虑将零误差的雨强点定在小雨强位置,如0.1 mm·min-1或0.2 mm·min-1。雷达式雨量传感器的参数优化也应当注重对小雨强的精确测量。光电式和压电式雨量传感器应当从仪器结构上进一步考虑如何减小系统性误差对小雨强降雨过程的观测影响。
2.4 过程降雨时间特征
根据式(5)和式(6),计算微智站和标准站降雨时间特征参数的差异(表4),负值表示微智站早于标准站,正值表示微智站晚于标准站。由表4可见,雷达式微智站中除微智站C04外,其余5台微智站记录降雨过程的开始时间偏早,对应有效降雨率a也普遍大于标准站,说明雷达式雨量传感器对降雨响应较快。微智站C07和微智站C09的开始时间晚于标准站20 min以上,结束时间早于标准站30 min 以上,这是由于双翻斗式微智站的雨量分辨力为0.2 mm,导致降雨开始时需要积累更多的雨量才开始翻动计数,降雨结束时因雨量未达到0.2 mm 而不被采集,表现为降雨过程提前结束。微智站C05和微智站C06的开始时间明显晚于标准站,结束时间明显早于标准站。
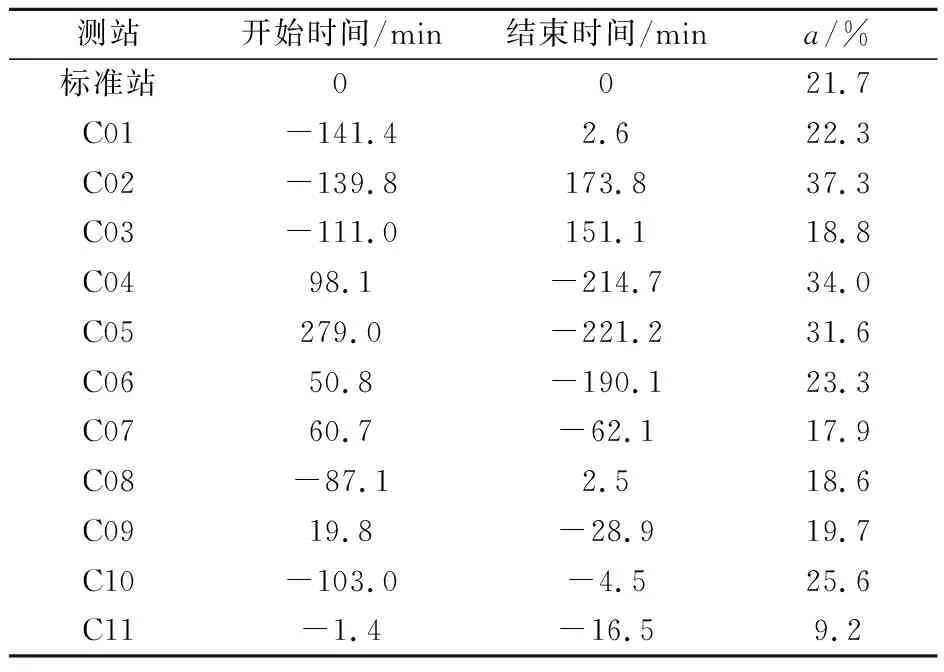
表4 标准站和微智站降雨时间特征参数差异Table 4 Differences in rainfall time parameters between standard station and micro-smart weather stations
由表4的有效降雨率可知,雷达式、光电式和压电式微智站的测值均大于标准站,超过22%,单翻斗式和分辨力为0.2 mm的双翻斗微智站有效降雨率小于标准站。说明雨量传感器的分辨力越精细,对细微降雨的监测越有效,有效降雨率也更大。
3 结 论
本文从雨量、雨强及其对雨量的贡献和降雨时间特征方面分析不同测雨原理微智站的观测能力,得到如下结论:
1) 翻斗式微智站能够满足误差控制要求,雷达式微智站对过程雨量的观测整体上偏大。雷达式微智站间的对比表明:不同算法和不同传感器硬件的结构设计可造成观测结果差异很大,光电式微智站对过程雨量观测误差较大,压电式微智站适合小雨强观测。
2) 微智站C07适合降雨极大值的观测,微智站C01和微智站C10的雨量传感器内部算法设置的相关系数经订正后可用于降雨极大值观测,且订正后的观测能力得到进一步提升。光电式和压电式微智站测的降雨极大值偏小,不适合观测雨强极大值。
3) 微智站雨强累积占比大于95%对应雨强为[0.3 mm·min-1,0.6 mm·min-1],同时微智站雨量累积占比大于 50%对应雨强为[0.1 mm·min-1,0.4 mm·min-1]。这说明雨强不超过0.4 mm·min-1时,所有微智站观测的降雨占比均可达到总雨量的一半以上,故在业务中翻斗式雨量传感器率定应更加注重小雨强的观测准确性。
4) 对过程降雨时间特征参数分析可知,随着分辨力增加,翻斗式微智站的降雨开始时间滞后,结束时间提前。雷达式微智站对降雨的响应较快。雷达式、光电式以及压电式微智站的有效降雨率在22%以上,均大于标准站。单翻斗式和分辨力为0.2 mm 的双翻斗式微智站的有效降雨率小于标准站。微智站雨量传感器的分辨力越精细,对细微降雨的监测越有效,有效降雨率也越大。
