小天体柔性附着技术
2023-07-24崔平远张成宇朱圣英葛丹桐龙嘉腾梁子璇
崔平远,张成宇,朱圣英,葛丹桐,龙嘉腾,邵 巍,梁子璇
(1. 北京理工大学深空探测技术研究所,北京 100081;2. 深空自主导航与控制工信部重点实验室(北京理工大学),北京 100081;3. 青岛科技大学自动化与电子工程学院,青岛 266100)
0 引 言
小天体(包括小行星和彗星)探测对人类了解太阳系的形成演化与生命起源、防御近地天体撞击以及验证最新的航天技术具有重要价值。小天体探测具有多种方式,如远距离飞越探测、轨道绕飞探测与原位采样探测等,其中,原位采样探测可以获取更多的星表物质信息,是近年来各国小天体探测任务的焦点。
由于小天体质量小、引力弱,着陆器的着陆过程较为缓慢,且在小天体表面的弱引力环境中,着陆器通常是附着在小天体表面,因此小天体弱引力环境下的着陆过程一般称为“附着”[1]。相比于月球、火星等大天体着陆,小天体附着面临一系列新的技术问题,包括:1)小天体引力场不规则,使得附着过程的动力学模型复杂;2)小天体表面形貌复杂,附着过程需要具备陨石坑、岩石等障碍的规避能力;3)小天体表面先验信息缺乏,使得附着环境不确知;4)小天体表面引力弱,使得着陆器与小天体表面接触时易反弹。因此,小天体附着任务对导航、制导、控制等技术提出了挑战。
已经实施的小天体探测任务包括:美国的“近地小行星交会”(NEAR)与OSIRIS-REx任务,日本的“隼鸟”号和“隼鸟”2号任务,以及欧洲航天局的“罗塞塔”(Rosetta)任务。目前,我国也在推进“天问二号”的研制工作,计划在2025年前后发射小天体探测器,对小行星2016HO3和彗星311P分别实施附着采样和绕飞探测。已经实施的任务中,小天体附着方式主要有两种,一种是“刚性+缓冲”方式,另一种是“接触即走”(Touch and go,TAG)方式,两种方式均存在一定的不足,并没有很好地解决弱引力环境中的稳定附着问题。
本文将对已实施小天体任务采用的附着方式进行分析,并结合团队的最新研究工作介绍“柔性附着”概念,为未来的小天体附着任务提供一种新的思路。同时,也将围绕柔性附着方式,从感知、导航、制导、控制等方面总结关键技术的难点及进展,并探讨未来的研究方向。
1 小天体附着主要技术问题
小天体表面附着采样要求着陆器安全、准确地到达期望的着陆点。然而,小天体具有引力不规则、环境不确知等特点,给附着的导航制导控制等带来了如下技术难题。
1.1 引力场不规则
不同于火星、月球等半径较大的圆球形天体,小天体通常非圆球或椭球状,且内部质量分布不均。因此,小天体附近的引力场呈现出不规则特性,动力学环境极为复杂[4]。小行星地理星(1620 Geograp-hos)的引力场分布如图1所示,其尺寸约为5.0 km×2.0 km×2.1 km[5];表面引力加速度在4.3×10-4~7.0×10-4m/s2之间,最大与最小引力加速度相差超过60%。不规则的引力场使得建模困难,附着任务之前通过观测等手段获取的数据难以建立精确的引力场模型。此外,小天体表面的引力方向与法线方向存在较大偏差,对着陆时的角度提出了约束。若轨迹的着陆角度不合理,接触小天体表面后极易发生倾覆或翻滚。因此,不规则的引力场给附着过程的制导控制带来了难题。
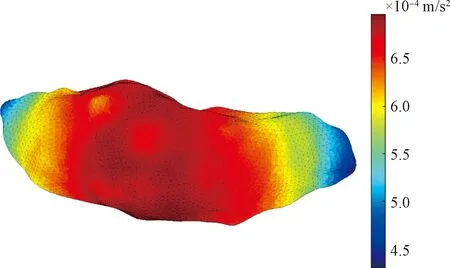
图1 小行星地理星的引力场分布
1.2 星表形貌起伏大
小天体除整体形状非规则外,局部形貌还呈现出起伏大的特点。首先,小天体尺寸相对较小,其曲率明显大于月球、火星等大天体。因此,着陆器附着的对象是一个不规则曲面而非平面,表面可达区(着陆器在给定初始条件及约束下所有能够到达的终端位置的集合)求解与附着轨迹设计都更加复杂[6]。其次,小天体表面的陨石坑、岩石等复杂形貌使得能够着陆的平坦区域较少,可着陆区域有限。因此,选取小天体表面着陆点时需重点关注附着的安全性与速度增量[7]。此外,对于选定的着陆点,小天体附着过程对制导控制系统的精度需求也更高。为保证着陆器与小天体表面的安全平稳接触,要求附着位置偏差非常小,一般为米级。
1.3 附着环境不确知
小天体附着任务不但面临引力场不规则、形貌起伏大等问题,还需应对附着环境不确知的挑战。由于小天体距离远、尺寸小,前期探测数据缺乏,先验信息不足。例如,中国将要实施探测的小行星2016HO3,其直径不足50 m,目前只能基于光学观测获取其轨道与形状等基本参数,并由此做出一些预测或设想[8]。实际附着过程中,存在小天体自旋参数偏差、引力场模型偏差、光压扰动、形貌建模偏差(如体积较小的碎石块无法准确建模)和小天体内部活动产生的微小抛射物质等不确知因素。在附着前,虽然可以对小天体实施绕飞探测以获取一定的数据,但有些信息仍然无法准确预测,而这些信息将影响附着任务的顺利实施。
1.4 星表接触易反弹
小天体引力场不仅不规则,还极其微弱,如美国OSIRIS-REx探测的贝努小行星,其表面引力加速度不到地球的十万分之一,逃逸速度不到0.3 m/s[9]。因此,着陆器与小天体表面接触时,如果存在残余速度,则极易发生反弹逃逸。于是,小天体附着任务一般要求“双零”约束[1],即不只要求位置偏差为零,还要求相对速度为零,对导航、制导与控制技术均提出了较高的要求。事实上,由于事先对小天体动力学环境的信息掌握有限,难以建立精确的动力学与控制模型,同时执行机构也存在一定的控制误差,故实际的制导控制系统难以实现严格的“双零”约束,尤其是零速度约束。
2 小天体附着方式
小天体的附着方式最初是参考月球、火星等着陆器设计的,即通过对刚体施加推力来实现着陆器的减速。考虑小天体表面引力弱、易反弹的特点,TAG与柔性附着方式也陆续被研究,且前者已经得到应用。
2.1 刚性附着方式
刚性着陆器/探测器在小天体表面附着时,即使存在很小的残余速度也可能导致反弹或倾覆损毁。2001年,美国NEAR任务实现了首次小天体表面附着,采用的正是刚性附着方式。根据任务设计,NEAR探测器需要通过四次制动机动逐步完成减速与降轨,但由于机动动作的执行偏差和导航的不确定性,第四次制动机动在完成速度变化的三分之二之后就停止了。最终,NEAR探测器以1.5~1.8 m/s的垂直速度和0.1~0.3 m/s的水平速度着陆在爱神星(Eros 433)表面[10]。多普勒信号表明,NEAR探测器在稳定附着前曾经从表面反弹[11],但幸运的是,遥测数据显示反弹并没有对探测器的健康状况造成影响。
为降低着陆时刻残余动能引发的反弹与倾覆问题,实际任务中通常在刚性探测器上安装附着辅助机构,例如阻尼器和着陆支架等,对残余动能进行耗散。2014年11月,ESA发射的“罗塞塔”探测器在彗星67P附近成功释放“菲莱”(Philae)着陆器,首次实现了彗星表面附着。为了防止从彗星表面反弹或倾覆,“菲莱”着陆器不但以碳纤维/蜂窝铝结构为主体[12],还额外配备了以下三个辅助装置:
1)主动下降系统(ADS)[13],主要由安装在“菲莱”着陆器顶部的一个冷气系统和一个推进器组成。ADS具有两个功能,一是在下降过程中使用,以减少着陆时间;二是在着陆器触地时提供几秒钟的向下推力,以避免发生反弹。
2)着陆支架,如图2所示,其由碳纤维管制成的可折叠三脚架、一个连接在着陆器本体上的中央机电阻尼系统和着陆脚上的冰螺钉组成。在着陆时,机电阻尼系统通过将阻尼行程转换为驱动发电机的旋转,从而使残余动能转化为电能,该过程可安全地吸收约60 J的动能(相当于垂直触地速度1.1 m/s)。
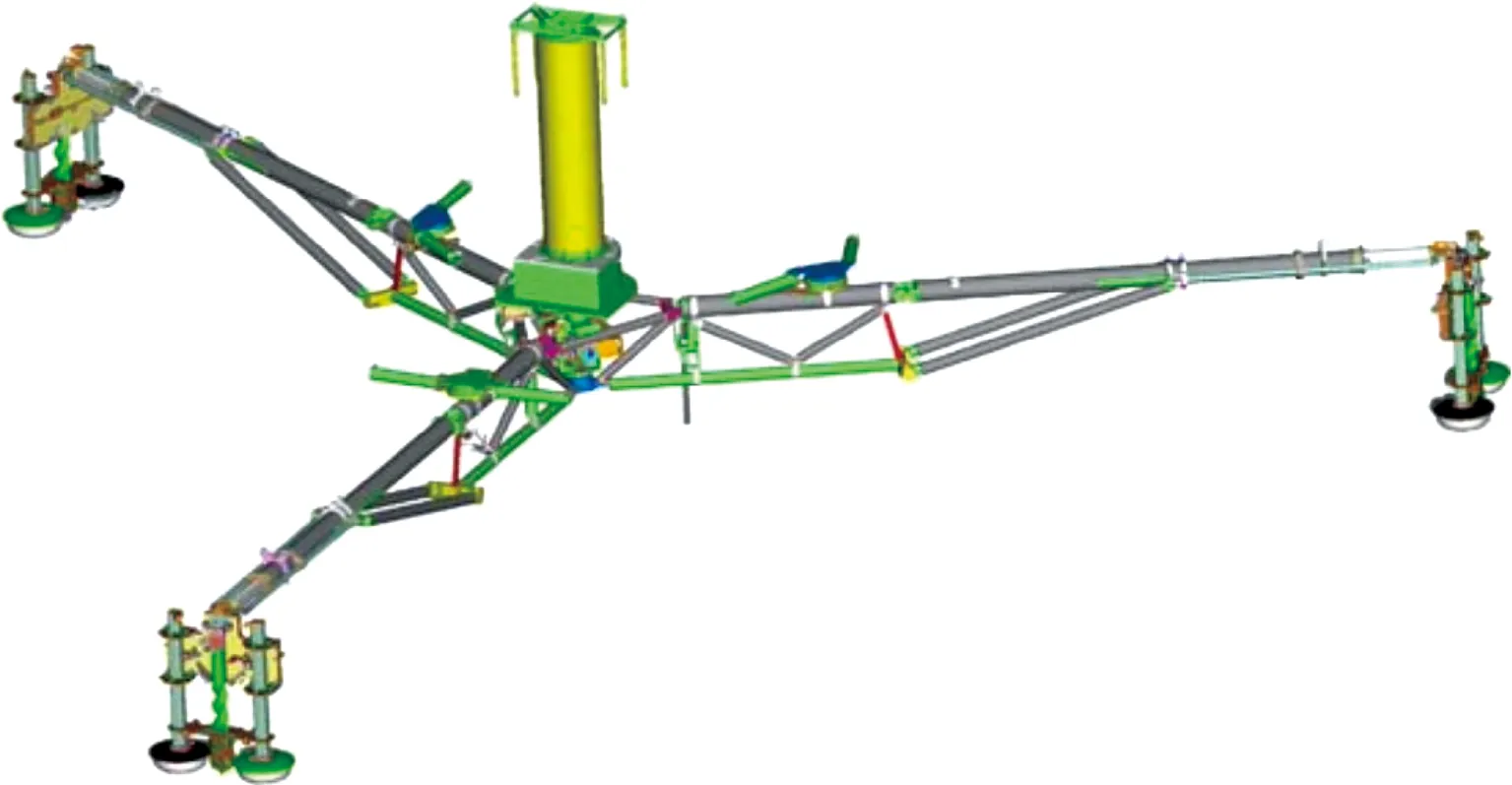
图2 “菲莱”着陆器的着陆支架[13]
3)着陆锚定系统[14],锚定“鱼叉”通过绳索链接在着陆支架上。着陆时,“鱼叉”自动发射并固定在彗星土壤中,通过滑轮机构将“菲莱”着陆器拉回并使其能够长期停留在彗星表面。
传感器测量数据表明,在“菲莱”着陆器实际着陆中,ADS系统未能打开。同时,触地信号触发时,“鱼叉”没有发射,“菲莱”着陆器在着陆时没有被固定[15]。着陆器内部中央机电阻尼器在着陆高度为42.6 mm时被驱动,此时着陆器的速度约为1 m/s。经过着陆器内部中央机电阻尼器以及三脚架穿透地面,约90%的动能被消耗,之后,着陆器的速度降为0.325 m/s[16]。此时,着陆器虽然已经消耗了大部分残余动能,但仍发生反弹、倾覆,并在经历2 h左右的翻滚后,最终降落在一个洞穴的周围[17]。该洞穴阻挡或部分遮挡了来自于太阳的光照和来自于轨道器的通讯信号,使得预先确定的长期科学任务无法实施[18]。
NEAR探测器与“菲莱”着陆器的任务表明,刚性附着方式(包含带辅助装置的刚性附着方式),难以克服弱引力下的反弹问题,故不适用于小天体着陆。
2.2 TAG附着方式
为了减少刚性着陆器在微重力小天体引力环境下附着面临的反弹与倾覆风险,NASA的近地小行星采样返回(NEARS)任务提出了TAG着陆方案[19]。如图3所示,TAG着陆模式主要包括下降接触和上升离开两项操作。在TAG着陆过程中,着陆器首先通过着陆机动以一个较小的速度着陆,并与小天体表面短暂接触,接触时间约为1 s。之后,着陆器获得反向逃逸速度,通过逃逸轨道快速离开小天体表面。在TAG着陆模式中,采样在与小天体表面的短暂接触过程中实施,由安装在着陆器下方的采样机械臂完成。这种采样方式只需要机械臂与小天体表面接触,从而降低着陆器与小天体表面相撞的危险,保护太阳帆板以及除采样机械臂以外的科学探测载荷。

图3 TAG着陆方式示意图
NEARS任务虽未实施,但所提出的TAG着陆方案被后续日本的“隼鸟”号与“隼鸟”2号任务以及美国OSIRIS-REx任务采用。“隼鸟”号探测器于2005年11月对小行星糸川进行了采样探测,并首次尝试了TAG的方式。2019年2月,“隼鸟”2号探测器采用TAG方式对小行星龙宫进行附着采样[23]。“隼鸟”2号整个附着过程的轨迹可分为五段[24]:下降段、信标跟踪段、着陆段、逃逸段和回升段。探测器在距离小行星表面8.5 m的高度进入着陆段,通过施加小的下降脉冲机动实施着陆动作,并在约为100 s后与小行星表面接触。着陆时刻,探测器的水平和垂直着陆速度分别为2.63 cm/s和7.94 cm/s。在与龙宫表面接触2.8 s后[25],探测器立即施加一个63.95 cm/s的逃逸机动,使其克服龙宫的引力快速上升。
2022年10月,OSIRIS-REx探测器同样采用TAG模式对小行星贝努进行采样[26]。探测器在贝努的冻结轨道上启动TAG机动序列,TAG机动主要由离轨机动、检查点机动和匹配点机动组成[27]。在离轨机动4 h后,探测器执行检查点机动以消除大部分的表面相对横向速度,并开始向小行星表面下降;探测器到达45 m高度的匹配点后,执行匹配点机动以匹配贝努旋转产生的表面速度,并且将下降速度降为10 cm/s;之后,探测器向小行星表面自由落体直至探测器与小行星表面发生接触。OSIRIS-REx探测器与小行星贝努接触时间约为6 s,随后探测器启动返航机动以获得上升速度。最终,探测器以30 cm/s的速度沿双曲轨道离开贝努。
截至目前,各航天机构已经执行过3次TAG模式的采样返回任务。“隼鸟”号与小行星糸川的接触时间约为1 s,采集了约1500个微小颗粒,总质量低于1 mg;“隼鸟”2号与小行星表面接触时间约几秒钟,其采样质量为5.4 g;OSIRIS-REx探测器与小行星接触时间为16.6 s,预计采集了250±101 g的样本[28],将于2023年运送到地球。可以看出,3次任务的采样量均较小,这主要是由于在TAG着陆模式下,探测器与小天体表面接触时间较短,没有充裕时间获得足够样本。由于无法稳定停留在小天体表面,TAG方式所实现的并非严格意义上的附着。
2.3 柔性附着方式
TAG附着方式虽然可以完成小天体表面采样,但着陆器与小天体只能短暂接触,无法稳定附着在小天体表面,并未实现真正意义上的附着。换句话说,TAG附着方式只是提供了一种短暂采样方式,并未解决弱引力环境下的附着难题。针对小天体表面附着难题,崔平远等[29]提出了柔性附着的概念,以基于智能材料的柔性着陆器取代传统刚性着陆器,为小天体特殊环境下的附着任务提供了新的思路。
图4为柔性附着过程示意图,着陆器采用柔性可变形材料,附着过程开始之前呈收拢状态,附着末段展开并呈圆饼状外形,附着后可自主装配恢复着陆器功能。相比于刚性着陆器,柔性着陆器一方面增大了与小天体表面的接触面积,当着陆器存在姿态偏差时,发生倾覆翻滚的风险降低;另一方面,利用特有的柔性材料,在附着存在末端速度偏差时,可通过柔性材料消耗着陆器残余动能,从而避免发生反弹逃逸。

图4 柔性附着示意图[29]
图5给出了柔性着陆器展开前后的示意图及透视图。为便于附着过程中的观测与操控,柔性着陆器采取“质量聚集区+柔性材料”的组成方式。每个质量聚集区内集中安装一套敏感器和执行机构,用于完成导航观测和姿轨控制。为便于问题描述,可将具备特定功能、具有刚性特征的质量聚集区称之为节点。从柔性着陆器的可操控性角度考虑,节点至少需要配置3个。
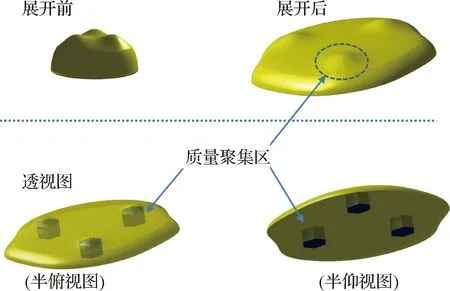
图5 柔性着陆器示意图
对于刚性着陆器,一般用质心的位置和速度描述其线运动,用欧拉角描述其姿态/角运动。然而,对于三节点的柔性着陆器,属于高维非线性系统,其状态描述不同于传统的刚性着陆器。为近似描述柔性着陆器状态,可定义3个质量聚集区所在平面为柔性着陆器的“等效面”[29],如图6所示。于是,用“等效面”的中心位置和速度近似表示柔性着陆器的位置和速度;用“等效面”与着陆平面的夹角,即“等效面”倾角θ,近似表征柔性着陆器的姿态。这里,着陆平面是指小天体附着点固连系的XOLY平面;“等效面”的中心位置和速度分别通过3个质量聚集区构成三角形的形心位置和速度确定;“等效面”倾角θ反映了柔性着陆器相对着陆平面的水平程度,由柔性着陆器“等效面”法向量ns与着陆平面法向量nL间的夹角确定。

图6 柔性着陆器“等效面”示意图[29]
3 小天体柔性附着关键技术
与传统刚性附着方式相比,柔性附着可以容忍更高的末端残余速度和更大姿态控制误差,可有效提升附着任务的成功率,故更适用于小天体附着采样任务。不过,柔性附着作为一种新型附着方式,也存在若干理论与技术问题待解决。例如,多敏感器/执行机构的协同问题、柔性着陆器自身的不可控形变带来的扰动问题,这些都给GNC系统设计提出了挑战。
3.1 柔性附着智能感知技术
小天体环境暗弱且存在自旋,仅通过前期天文观测获取的先验信息十分有限。柔性附着过程中对小天体环境的感知与匹配技术是后续自主导航、制导控制、着陆点选择、障碍规避等实施的前提和基础,直接关系到自主附着任务的成败。柔性附着的环境智能感知技术,一方面要提升着陆器对暗弱动态环境的感知能力;另一方面,要有效利用多个敏感器获取的信息,提升协同感知能力。
3.1.1动态暗弱环境智能感知技术
与传统算法相比,深度学习方法具有较强的挖掘数据潜在特征的能力,在提取陨石坑、岩石等导航陆标特征时有着明显优势。不同于月球、火星等大天体的识别感知[30-31],小天体的快速自旋特性会导致相机与目标在短时间内具有较大的相对视角变化,同时会产生天体表面阴影区域明暗变化,使得同一目标区域前后成像不一致,造成特征动态感知困难。之前的探测任务,如“罗塞塔”[32]、OSIRIS-REx[33]、“黎明”[34]等,大都采用Stereophotoclinome-try(SPC)技术[35],利用Lunar-Lambert光照模型,模拟生成了下降采样过程阴影图像,通过归一化互相关算法完成模板匹配。该算法非常依赖于对三维形貌及光照建模的精确性,同时该算法较为复杂、存储量大,阴影区域重建效果较差,需要大量人工干预,应用具有局限性。
针对小天体陨石坑难检测的问题,邵巍等[36]提出了一种陨石坑深度学习智能检测算法。通过局部方差均衡算法增强暗弱环境下陨石坑特征,利用多视角重投影模拟小天体自旋及相机视角变化进行数据增强。对于小陨石坑漏检问题,将预测图像切分成若干个有重叠区域的子图像并合并预测结果,该算法与现有主流检测网络相比具有更好的效果。
然而,研究动态变化下的小天体环境智能感知匹配仍然是具有挑战性的任务。首先,要对小天体图像进行非线性亮度增强,提高暗弱环境下的感知能力;其次,应提高网络模型对大视角及阴影变化下的适应能力,完成动态过程对特征的稳定匹配;此外,还应尽量结合已知信息,如太阳入射角、小天体三维模型、着陆器位姿信息等,将先验信息融入网络结构,实现小天体动态暗弱环境特征智能提取与稳定匹配。
3.1.2柔性附着智能协同感知技术
利用柔性着陆器携带的多个敏感器进行协同感知,不仅可以有效扩大观测区域,从多视角观测提高对环境的感知能力,还可以提高柔性着陆器导航精度与鲁棒性。然而,对于柔性着陆器,各观测节点处于动态关联,其位姿状态估计也具有不确定性,观测视角存在差异,甚至可能没有共同区域。利用传统特征匹配算法可能会导致误匹配或无法匹配的情况,难以实现联合感知。现有的协同感知技术大都基于刚性着陆器,观测区域及感知目标的位置可通过不同传感器之间的联合标定进行确定;同时,区别于相互独立对象的协同感知,柔性着陆器的各节点之间存在一定的动态约束。因此,研究柔性附着的智能协同感知既是一个难点问题,又具有重要的理论与实际应用价值。
针对柔性附着动态关联协同感知难题,可利用多节点的时空关联,实现协同感知。一方面通过各节点的历史观测数据,结合柔性约束的动态方程,预测下一时刻感知目标出现的位置及概率;另一方面,利用多节点的相对位姿及识别结果,通过估计重叠区域进行感知结果的增强,并构建显著特征多视角数据关联匹配,为协同感知提供约束条件,从而最大化利用各节点传感器的观测信息及状态估计信息,提高附着过程对未知复杂环境的协同感知能力。
3.2 柔性附着协同估计导航技术
小天体表面信息匮乏、导航信息有限,对精确导航带来挑战;同时,受材料特性等影响,柔性着陆器在附着过程中易发生柔性形变,导致节点间相对位姿动态变化,影响附着导航信息融合估计精度。在复杂形貌中精确提取出导航特征进行位姿确定,并基于多节点测量进行柔性附着状态协同估计,是提高柔性附着精度的关键技术。
3.2.1柔性附着状态估计技术
柔性附着过程中,基于敏感器测量信息进行着陆器状态估计,柔性体上各测量节点可利用惯性测量单元、激光测距仪和光学相机获取导航信息,实现附着状态估计。在小天体附着状态估计方面,美国JPL实验室提出了一种基于计算机视觉的自主导航方法,可通过跟踪可见特征点和导航陆标进行小天体附着自主导航[37]。通过相机拍摄小天体的表面光学图像及激光测距仪测量着陆器至星表特征点的距离,来估计着陆器的绝对位置和相对运动信息,同时获得小天体表面的三维地形图。日本JAXA的小天体探测任务利用光学测量信息进行了着陆器附着状态估计[38-39],通过光学导航相机对天体表面拍照,利用激光测距仪测量着陆器到星表的距离,在导航滤波器中处理这些图像和距离信息来获得着陆器的位置和速度。
文献[40]针对小天体表面附着陆标优化选取问题,在导航陆标构型可观测度的基础上,考虑到附着下降轨迹的特点,构造了陆标选取指标,给出了最优导航陆标递推优化选取方法,降低节点状态估计解算复杂度。文献[41]针对利用导航陆标进行附着位姿六自由度状态估计问题,基于欧式变换下角度不变性,提出以导航陆标观测视线之间所形成的夹角作为观测量,对像素观测方程中位置、姿态状态进行解耦求解。文献[42]考虑形貌特征图像边缘识别的特点,建立了陆标特征中心定位的误差分布模型,针对中心定位误差具有非独立同分布的特点,通过对协方差矩阵奇异值分解构造不同特征点的权重矩阵,提出了考虑观测误差不确定性加权的着陆器位姿估计方法,提高着陆器导航估计精度。文献[43-44]针对附着环境未知时难以进行绝对导航定位问题,以特征陨石坑边缘曲线作为导航陆标,提出了小天体附着曲线匹配光学导航方法,以相邻图像的曲线特征和着陆器位姿估计信息建立未知曲线特征观测模型,同时将IMU测量误差引入扩展状态估计模型实时估计修正,提高着陆器附着节点状态估计精度。
3.2.2柔性附着状态协同估计技术
为进一步提高柔性附着导航估计精度,利用节点间测量信息和柔性体结构约束,通过协同估计实现柔性着陆器的自主导航。如图7所示,柔性着陆器可以借助安装在多个节点处的敏感器(相机或测距仪等),从空间不同方位对附着形貌进行观测,为状态估计提供多视角、多尺度、多类型的测量信息,通过进一步设计多源信息融合方法、协同估计滤波器等进行柔性附着状态的精确估计。
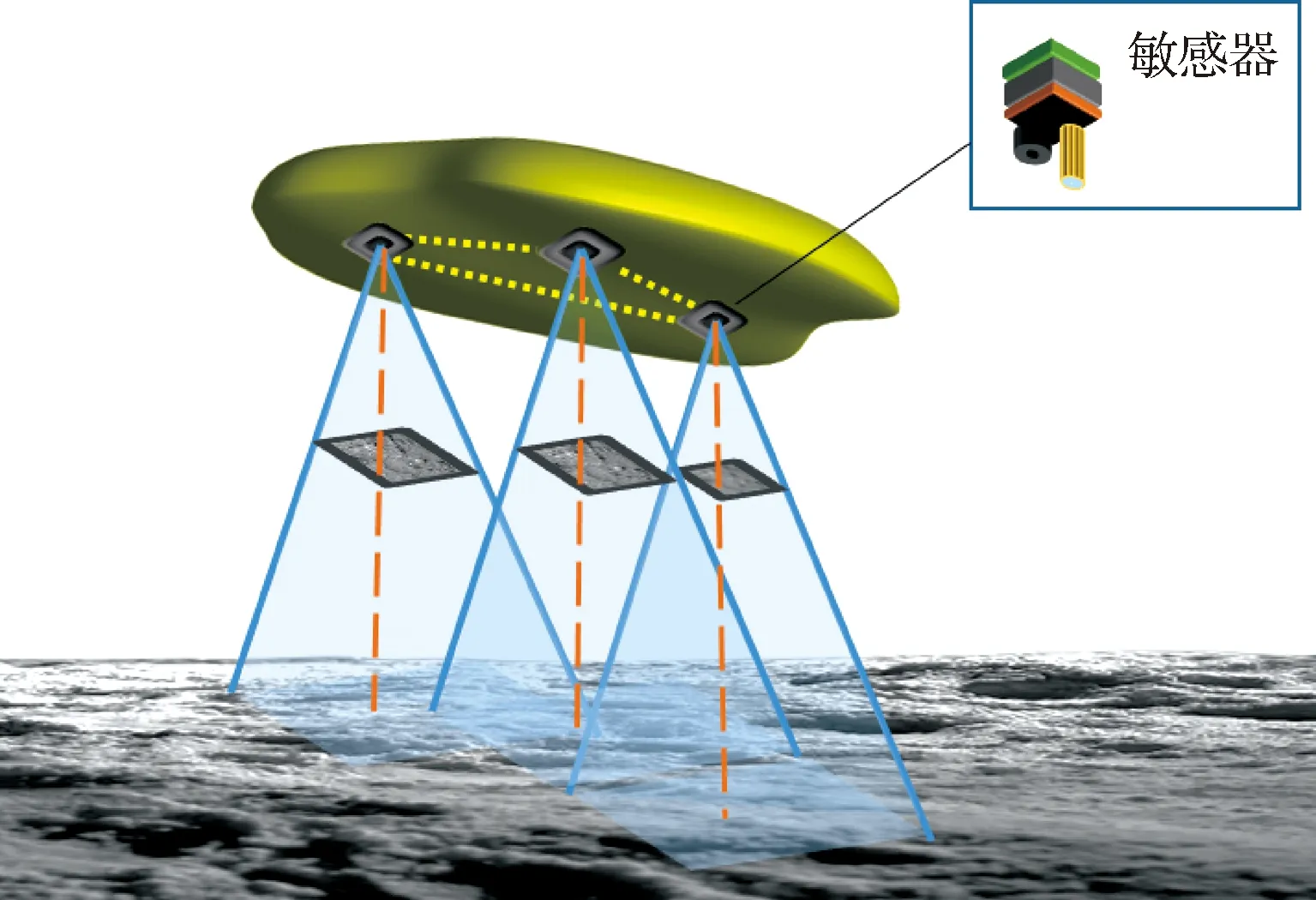
图7 柔性附着协同观测示意图
柔性着陆器在附着过程中存在柔性形变、节点间运动状态强耦合,导致节点状态精确估计困难;同时受着陆器尺寸限制,节点间距离较短,导致利用节点位置计算柔性着陆器姿态时,“等效面”倾角对位置估计误差敏感。崔平远等[29]针对小天体柔性附着模式,提出了柔性附着状态协同估计方法,利用柔性附着状态约束和节点间关联观测信息,提高节点状态估计精度,进而提高柔性着陆器的位置、速度和姿态估计。该方法在柔性体上多个节点状态估计的基础上,建立节点间协同修正机制,引入柔性附着状态约束和关联观测信息,提高节点状态估计精度,并利用节点状态确定“等效面”中心位置、速度和倾角,进行柔性着陆器的状态估计,从而为柔性附着自主导航提供了可行的技术途径。文献[45]考虑柔性体节点间运动的牵制作用,设计并行滤波算法对附着状态与柔性补偿量进行同步估计,利用柔性补偿量修正节点状态,提高柔性附着状态估计精度。
3.3 柔性附着强约束制导技术
由于柔性着陆器的特殊配置方式,在柔性附着制导中,需要考虑更多的约束条件。除了传统附着要求的“双零”约束与避障约束外,还需考虑控制约束(节点处的推力幅值及方向约束)、观测约束(节点处的敏感器的视场角约束)、姿态约束(除特殊的机动情况下,柔性着陆器的整体姿态应尽可能水平),以及构型约束(柔性着陆器的节点构型变化受限)。针对强约束条件下的柔性附着问题,可以采取两种制导思路:一种是“聚集式”制导,以柔性着陆器整体为对象,在传统附着制导技术的基础上,考虑柔性附着新的约束条件,突破多约束附着轨迹优化与制导技术;另一种是“协同式”制导,以柔性着陆器的节点为对象,考虑节点间相互作用,解决非独立节点智能协同附着问题。
3.3.1柔性附着聚集式制导技术
如何使柔性着陆器满足复杂的状态约束与控制约束,是聚集式制导技术的关键。最优制导方法允许在制导律设计的过程中直接考虑状态量和控制量的过程约束,因此在着陆制导问题中受到了广泛的关注[46-47]。Açkmee等[48-49]考虑推力幅值与方向约束、下滑角约束和终端约束,建立了行星着陆制导的最优控制模型,并利用无损凸优化技术将其转化为凸问题,进而使用凸优化方法进行求解。Lee和Mesbahi[50]在燃耗最优着陆制导中考虑相机的视线角约束,针对视线角约束与着陆器的平移、旋转运动耦合导致的轨迹规划复杂问题,利用单位对偶四元数将动力学表示为分段仿射系统,在模型预测控制的框架内解决了精确着陆问题。Long等[51]针对复杂约束下的避障轨迹优化问题,将避障约束转化为轨迹方向约束与距离约束,设计了矢量形式的约束表征方法,通过求解优化问题生成满足复杂约束的矢量轨迹。
对于小天体的柔性附着问题,除了复杂约束外,还需要考虑形貌崎岖与环境不确定性带来的困难。文献[52]采用“自上而下”主动避障的思想,建立了三维凸轨迹的条件,设计了具备主动避障能力和鲁棒跟踪性能的小天体附着轨迹闭环优化方法。为了提升附着轨迹的自主调节能力,文献[53]从二阶锥优化的原理出发,将轨迹的曲率特性与着陆器的位置、速度矢量指向联系起来,提出了随小天体形貌自主调节的自适应曲率制导方法,提高了附着轨迹的安全性与燃耗经济性。
3.3.2柔性附着协同制导技术
柔性附着协同制导技术,解决的是多个节点如何有效协作以完成小天体附着任务的问题。目前,协同制导理论与技术主要针对相互独立的对象。例如,Wang等[54-55]以多个独立的航天器为对象,研究了小行星附近的轨道编队问题。这些协同制导方法无法考虑多个对象之间存在的作用力,不适合用于柔性着陆器的协同附着的制导设计。
对于柔性着陆器,节点间作用力具有极强的非线性,且随着节点构型动态时变[56]。为便于协同附着制导律设计,可用“弹簧-阻尼-扭簧”模型近似描述节点之间的柔性作用力,如图8所示。

图8 柔性着陆器及简化模型示意图
针对柔性着陆器协同附着制导问题,文献[57]以节点高度差异表征柔性着陆器的姿态平稳性,设计了考虑燃耗与姿态平稳性的综合优化指标,基于最优控制理论推导了解析形式的协同制导律,可用于柔性着陆器的平稳附着。考虑到简化模型中存在节点间柔性作用力的建模误差,文献[58]提出了“解析制导项+智能补充项”的制导框架,利用深度网络建立了柔性着陆器节点状态与控制指令的关系,并使用双重延迟深度确定性策略梯度(Twin delay deep determinisfic policy gradient,TD3)方法进行了补充项设计,提升了柔性着陆器附着性能。
3.4 柔性附着强耦合协同控制技术
柔性附着控制技术,解决的是如何协调三个节点处的推力器输出的控制力和控制力矩,以实现着陆器姿态稳定并完成期望的制导指令。与传统刚性着陆器相比,在聚集式和协同式制导控制方式下,柔性体控制律设计均存在显著的耦合效应。控制律设计的难点在于:1)由于节点构型动态变化,三个节点处的推力器控制之间耦合严重,使得控制分配设计困难;2)由于柔性着陆器状态高维,转动惯量等姿态控制参数难以表征;3)节点间柔性作用力复杂,使得控制模型的非线性强,且部分参数存在误差。因此,在不确定柔性形变影响下,柔性附着控制技术一方面要解决柔性着陆器位置和姿态耦合下,聚集式控制的节点控制力、控制力矩分配问题;另一方面,结合小天体不确知附着环境,在柔性形变与控制力耦合中,提高协同式附着控制的环境适应性和着陆稳健性。
3.4.1柔性强耦合聚集式等效控制技术
由于柔性着陆器所采用的特殊布局方式,导致其与传统刚性着陆器的姿态定义方式不同。在聚集式制导控制方案下,柔性着陆器的姿态需要由三个节点的状态共同表征,可以用文献[29]定义的等效面倾角来描述。在这种节点-柔性结构的特殊布局方式下,由于推力器布置在节点处,柔性附着控制需要同时考虑柔性着陆器整体的位置姿态与节点位置间的关系,即通过控制三个节点的位置,来达到同时控制柔性着陆器位置和姿态的目的。因此,控制律设计中,存在柔性着陆器位置和姿态的耦合问题。
事实上,航天器控制中的姿轨耦合问题广泛存在于航天器编队控制[59]、卫星控制[60]等领域。而柔性着陆器的姿轨耦合控制与前者之间存在着显著差异。这一差异主要体现在传统姿轨耦合控制的作用对象为刚体,而柔性着陆器控制中,由于柔性形变的存在,姿态控制中尤其是转动惯量存在显著变化,且这种变化存在明显的不确定性。
针对柔性着陆器姿轨耦合控制问题,将等效面倾角转化为节点的高度差,则可以建立面向节点高度差的柔性着陆器控制模式:通过调节三个节点处的推力和,输出期望的控制力;通过调节三个节点出的推力差,输出节点高度差控制。图9对比了刚性着陆器的传统分配模式与柔性着陆器的新型控制分配模式。

图9 传统分配模式与新型分配模式对比
3.4.2柔性强耦合协同式智能控制技术
在柔性着陆器中,作为控制力输出源的推力器安装于节点处。柔性附着时,节点将受到推力和柔性力的共同作用。在协同式制导控制方案下,就柔性着陆器和节点位置控制而言,推力的变化将起到两方面的作用:1)改变节点的加速度;2)使柔性着陆器产生形变。而柔性形变将进一步导致作用于节点处柔性力的变化,进而使节点受到的力和产生的加速度发生变化。因此,为产生制导所期望的节点加速度,柔性形变和推力间产生耦合作用。另一方面,就柔性着陆器姿态控制而言,由于柔性形变的影响,这种耦合将导致柔性着陆器本体的转动惯量发生改变,在产生相同姿态角加速度时,所需的控制力将发生改变。上述耦合作用再叠加小天体的不规则引力,将使柔性着陆器附着问题更加复杂。
柔性着陆器在目标小天体附着过程中的运行工况受到着微重力、强辐射、强热振等影响[61-62],且物理环境存在显著不确定性,因此,产生的柔性形变也与模拟环境存在一定差异。因此,采用传统方法设计柔性形变和推力耦合下的柔性附着控制律难以满足环境适应性与附着稳健性要求。
针对柔性着陆器构型时变导致的推力器控制耦合问题,可设计表征节点冲突情况的方向冲突函数、表征节点推力变化情况的幅值稳定函数,建立多推力器协同分配的优化模型,进而研究动态解空间多约束协同优化方法,以提高柔性着陆器控制推力的自主协调分配能力。考虑柔性着陆器在真实小天体环境下的动力学难以离线精确获取,协同制导方法设计时还应结合附着过程中的柔性着陆器的一些实测数据。例如,可以基于在线测量数据设计智能补偿控制项,形成多推力器耦合控制的智能分配方法,进一步提升柔性附着协同控制的精度与鲁棒性。
4 结束语
小天体具有引力弱、形貌暗、非合作、不规则等特点。传统的刚性着陆器在小天体表面附着时,存在反弹和倾覆风险。针对小天体表面稳健附着需求,本文论述了一种新型的柔性附着方式:着陆器通过增加与小天体表面的接触面积,可降低倾覆翻滚的风险;同时,着陆器利用柔性材料耗散残余动能,可避免发生反弹逃逸。柔性着陆器适用于弱引力小天体表面的附着任务,但存在诸多技术挑战。形貌感知方面,由于多敏感器间位姿具有不确定性且观测视角存在差异,需要研究柔性附着关联检测智能融合感知技术;状态估计方面,针对着陆器柔性形变导致节点状态牵连耦合难题,需要研究附着状态智能递推与鲁棒融合估计技术;制导与控制方面,针对柔性着陆器的模型高维非线性与操控强耦合问题,需要研究多个非独立对象的智能协同制导与控制技术。
