浅谈口腔虚拟仿真实操训练系统的发展现状*
2023-07-22牛丽娜
马 赛 殷 琦 王 富 高 婧 方 明 张 凌 董 岩 田 敏 牛丽娜
口腔医学是一门实践性极强的学科。合格的口腔医生不但要有扎实的理论知识基础和严谨的临床思辨能力,还要具有高水平的精细操作能力[1]。精细操作能力的培养依赖于长期、大量、反复的训练[2]。然而,多数口腔治疗操作属于有创的、不可逆的操作,难以在患者口内直接进行训练。过去,口腔医学临床前实践教学中,学生主要通过观察和模拟教师的操作,在模型或离体牙上进行练习。但是,这种训练方式与临床实际存在巨大差距,学生无法真实感受到患者体位、口腔内狭小空间及临近软硬组织对实际操作的影响,难以帮助学生顺利完成临床前训练与临床实习之间的过渡[3]。
口腔仿真实践训练系统是能够模拟临床实际操作环境,进而辅助临床前操作训练的专业教学工具。利用口腔仿真训练系统,学生可以在临床实习前通过大量训练掌握常用基本操作技能,如医患体位调节、支点选择、口镜牵拉和反射、组织保护、牙体预备等,实现理论学习与临床操作间的平滑过渡[4]。下面就口腔仿真系统的发展现状进行综述。
1.数字化口腔模拟器(Digital Dental Simulator)
近年来在计算机技术发展及数字化趋势的推动下,以虚拟现实(Virtual Reality,VR)技术为基础的数字化口腔模拟器在口腔实践训练中的应用得到了快速发展[5]。VR技术最早于20世纪80年代由美国人Jaron Lanier提出,它集人工智能、计算机图形、计算机仿真技术等为一体,通过计算机模拟出用户可以沉浸并感知的三维虚拟世界,是当前科技领域的研究热点。
1.1 数字化口腔模拟器的发展历程(图1)
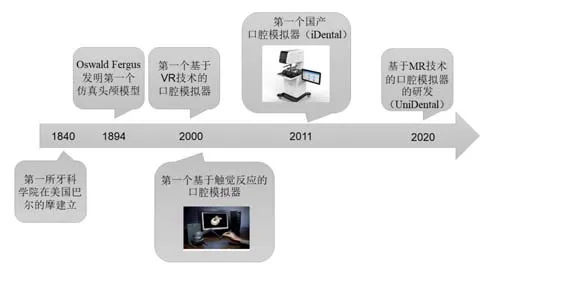
图1 口腔医学教育史中数字化口腔模拟器的发展与应用历程
VR在口腔实践教学领域的应用最早可以追溯于2000年前后[6,7]。早期的VR训练系统中,学生可以通过鼠标和键盘控制计算机中的虚拟高速手机,在虚拟牙齿上完成窝洞预备的训练。虽然此类虚拟仿真训练系统与临床实际存在较大差距,但它对硬件没有特殊要求,因此可以实现线上开放共享,学生可远程自主学习,不受上课时间及场地限制,具有一定的优势[8]。
受到航天领域虚拟仿真训练的启发,学者们在VR口腔模拟器中加入了触觉传感功能,学生可以利用操纵杆模拟口腔器械进行操作,同时得到触觉反馈,获得接近真实的模拟仿真训练[9]。经过十几年的发展,现代数字化口腔模拟器在结合触觉传感的基础上还增加了实时反馈功能、操作支点及脚踏板组件,形成了带有力学-视觉-听觉多元反馈的综合手部技能训练系统[10],为口腔医学生精细操作能力训练提供了全新的途径[11]。
口腔虚拟患者是利用三维扫描及其他捕获技术获取患者多源图像或数据,如颜面部软组织图像、牙列图像、骨组织或软组织图像以及下颌运动轨迹数据等,构建的口腔复合虚拟图像[12]。近年来,虚拟患者在口腔临床及教学中的应用获得了越来越多的关注。北京大学口腔医学院与北京航空航天大学合作,以个性化虚拟患者为基础三维图像,将混合现实技术(Mixed Reality,MR)与触觉传感技术相结合,在实体头颅模型中构建了虚拟的口腔环境(包括软组织、硬组织)及器械。与传统数字化口腔模拟器相比,这种新型模拟器(UniDental)结合了实体头颅模型,因此在训练中学生可以通过调节自己的体位改变操作视角,具有更贴近临床的仿真效果[13]。
虽然目前大部分数字化口腔模拟器主要用于牙体硬组织磨切训练,但其在种植、拔牙、颌面外科手术、牙周治疗以及正畸治疗等方面的应用也逐渐得到关注。例如,在种植操作训练方面,我国学者周勇、陈江将真实患者的CT数据和外科手术工具相关数据导入虚拟现实软件,结合虚拟现实头戴式显示器,自主研发了基于VR技术的种植培训系统。但是目前该培训系统仅能用于有限种植流程的培训且缺乏触觉反馈功能,因此仍需进一步优化[14]。除此以外,北京航空航天大学与四川大学华西口腔医学院学者进行合作,初步研发了能够全流程模拟种植窝洞预备的基于触觉反馈的模拟器,进一步提高了数字化口腔模拟器在种植手术操作培训中的仿真效果[15]。在正畸教学领域,数字化模拟器的应用还处于起步阶段。目前,我国学者已经尝试构建了具有触觉反馈功能的用于托槽粘接训练的模拟仿真系统,但其在教学中的应用效果仍有待证实[16]。
1.2 常见数字化口腔模拟器的应用场景和特点(表1)
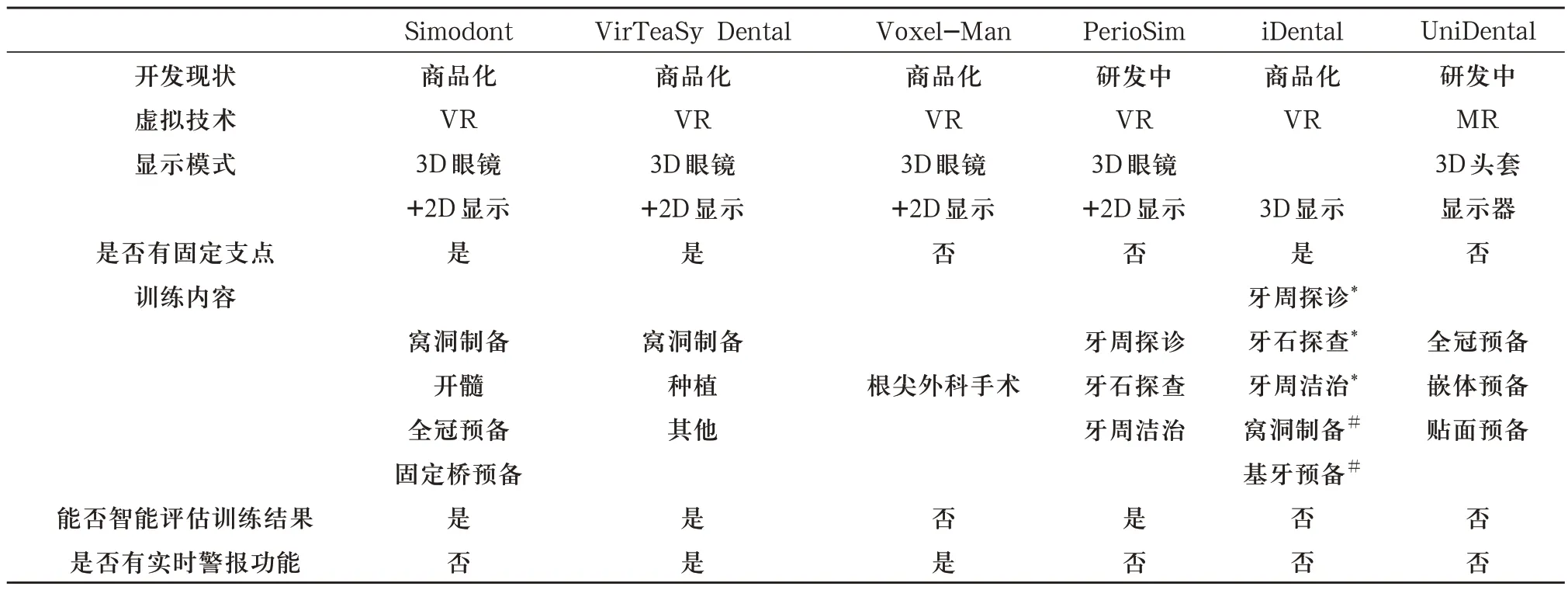
表1 常见基于触觉反应的数字化口腔模拟器及其特点
以由美国Moog公司与荷兰阿姆斯特丹牙科学术中心联合开发的基于触觉反馈系统的Simodont为代表的数字化口腔模拟器可以提供高保真虚拟仿真训练,为牙体预备以及手持器械模拟操作提供逼真的力学反馈,同时可以进行左右手涡轮机磨切和口镜下的操作练习,并通过高性能图像与音效合成提供逼真的练习体验[17]。该系统的“手部灵巧度训练”模块设计了由易到难的数种不同的目标形状,学生可以通过这一模块训练手部灵巧度、手眼协调力、三维空间评估、操作支点选择、口镜使用、镜像操作、车针选择等能力。该系统还可以进行去龋备洞、开髓、全冠预备和固定桥预备的操作训练,帮助学生掌握基本操作步骤和方法,同时加深学生对相关理论知识和治疗原则的认识和理解。牙体预备训练结束后,系统可以将学生的预备结果与预设标准进行对照,从而给予客观量化评价,帮助学生及时发现错误并纠正。除此以外,该训练系统中还包含了不同病例,学生需要先阅读病史并结合口腔检查和辅助检查结果做出诊断,制定出正确的治疗计划,随后才能选择合适的治疗器械进行模拟操作,可辅助培养学生的临床思维,提升综合能力。教师还可以通过扫描临床真实病例资料创建定制化的模拟病例,对系统自带病例库进行扩充。目前,开发者还在尝试在该系统中加入牙周和牙髓治疗相关训练模块,进一步扩大模拟训练的范围。
由伊利诺伊大学研发的PerioSim系统可用于牙周探诊、牙石探查和牙周洁治等牙周治疗相关训练。Steinburg AD等人的研究证实PerioSim系统可有效提高学生的牙周探针和刮治等基本技能水平[18]。
iDental是由北京大学口腔医学院与北京航空航天大学合作研发的首款国产基于力学反馈传感器的口腔模拟器。目前,产品化的iDental训练系统主要用于牙周探诊、龈上洁治、龈下刮治等牙周治疗的培训[19]。通过iDental训练,受训者能掌握牙周操作所需要的力量、方向、幅度、角度和运动轨迹等精细动作技能。另外,此系统能实时记录受训者操作过程的数据,进而支持通过回放和分析进行量化评价和考核,调动学生的积极性和主动性。当前,iDental在去龋、窝洞制备、全冠预备等方面的应用仍在研发中[20,21]。
VirTeaSy是由法国学者研发的口模拟训练系统,除了能用于常规备洞和充填模拟训练外[22,23],该系统还具有VirTeaSy Scan Implant 种植手术规划系统和VirTeaSy Implant Pro种植手术模拟系统,可用于种植模拟训练[24]。VirTeaSy Scan Implant可训练学生根据放射影像合理选择种植体(形状、直径、长度)并规划种植位点(位置、方向和深度)。VirTeaSy Implant Pro则可模拟种植手术过程,训练学生的种植操作技能。当学生在种植备洞中出现位置、角度和深度错误,或因操作不当导致备洞区域牙槽骨温度过高时,系统会发出警报提醒。另外,该系统还可以通过显示屏实时显示学生的操作过程,利于教师观察并实时给予指导。
Voxel-Man系统是主要用于根尖外科手术的仿真模拟训练系统[25]。该系统提供基础、进阶和考试三种应用模式。基础模式中,病变区域和周围关键解剖结构(如下颌神经管)被用鲜艳的颜色标记出来,可以帮助学生记忆和理解术区的解剖特征。当手术器械与重要解剖结构距离过近时,系统会发出警报给予提醒。
1.3 数字化口腔模拟器的优缺点相比于传统头颅模型训练系统,数字化口腔模拟器完全依赖虚拟仿真技术,在以下三个方面具有一定优势[26]。第一,无耗材问题,可进行无限次训练而不增加额外成本,有利于学生根据自身学习能力,通过合理反复训练提高操作能力。第二,操作结束后能针对操作结果给予客观反馈,帮助学生反思操作中的错误并在后续训练中进行修正,有助于学生自主学习训练。第三,无需实体涡轮机等器械,不会产生气溶胶,降低相关传染性疾病传播风险,也可避免涡轮机操作不当带来的危险,方便学生自主安全完成训练[27]。
目前的数字化口腔模拟器主要存在以下不足[28]。首先,初始安装成本较高,且每一种系统的软件功能有限,仅能用于少数特定口腔操作的训练;其次,训练在操作台进行,难以还原口腔内外的真实场景,且牙体硬组织切割手感与真实情况有一定差距,仿真程度有限;第三,训练结果的评价仅关注最终作品的外形、尺寸,无法实时对学生操作过程中的问题,如姿势问题、支点问题、车针方向问题等给予指导。因此许多学者认为,全数字化虚拟仿真技术目前仍不能完全取代传统的头颅模型仿真训练模式,只能作为辅助手段,与传统实践训练相结合才能最大的发挥优势[29]。
2.基于头颅模型的虚拟口腔模拟器
最早的头颅模型由法国医生Oswald Fergus在1894年发明,由一根金属支架、两个铜制上下颌支架和上下颌牙列模型构成(图2)[30]。从此以后,头颅模型不断被改进,直至今日依然是口腔医学实践教学中不可或缺的工具。

图2 口腔实践教学领域第一个头颅模型
传统仿真头颅模型虽然具有较高的仿真性,但也具有很多缺点。第一,学生训练效果的评价依赖于教师的主观判断,缺乏客观性、准确性和实时性;第二,对实习模型和人工牙的磨切为不可逆操作,且手机等设备需不断维护,反复训练成本较高[31]。第三,仿真度有待进一步提高,例如模型牙不能完全模拟牙釉质、牙本质的硬度、强度等机械性能指标,其磨切手感与临床实际仍有一定差距;头颅模型的橡胶面罩与人体脸颊质感、活动度不同;缺少舌头及口底组织,难以模拟实际临床患者舌头和口底组织对治疗的干扰。
在数字化技术的推动下,学者们将传统头颅模型与虚拟仿真技术相结合,形成了由电脑、追踪系统和仿真头模系统三部分组成的、虚实结合的交互式仿真头颅模型训练系统。所谓“虚”,指此类系统可通过虚拟技术实时追踪并成像;所谓“实”,指其像传统仿真头模一样,可在仿真牙列的人工牙上进行各种口腔实践训练[32,33]。例如,我国自主研发并商品化的迪凯尔艾知星口腔技能训练及实时评估系统,在训练过程中能够通过文字与动画一步一步引导学生在头颅模型上进行标准化练习,同时实时显示牙列及手机的虚拟图像;训练结束后,系统会对预备过程与结果进行客观评估[34]。
交互式仿真头颅模型兼具了传统仿真头颅模型和数字化口腔模拟器的优点,在口腔实践训练中具有以下优势[35]。第一,高度模拟临床操作的实际过程,学生在将“患者”调节到合适位置后,在正确的体位下,通过口镜的辅助,利用高速涡轮机和车针对模型牙齿进行磨切。通过训练,学生不但能掌握牙体预备的步骤、方法,还能学会正确的治疗姿势、体位、支点选择和高速手机与车针的使用。第二,虚拟仿真技术的融合使得学生的预备过程的三维虚拟模型能够实时显示在电脑屏幕上,方便学生实时对照理想预备体外形发现自身操作中的问题,也方便教师及时给予指导和帮助。操作结束后,系统能通过数字建模显示预备体的不同剖面,帮助学生从不同剖面评估预备结果。同时,系统还可以对学生的操作过程和操作结果(预备量、预备外形、肩台位置与外形)给予综合客观评估,帮助学生认识到自身的不足与优势,并在后续训练中重点改善,同时帮助教师了解学生操作的共性和个性问题,进而目的明确地给予重点讲解和个别辅导。
目前交互式仿真头颅模型的缺点主要在于初始投入成本及后续维护与耗材成本较大,在经费有限的情况下,不允许学生通过大量、反复练习提高操作水平。
3.口腔虚拟仿真系统在实践教学应用中的设计与思考
伴随着信息技术与高等教育实验教学深度融合工作的推进,我国各项口腔医学虚拟仿真实验教学项目建设进入快车道,各种新型智慧实践教学手段不断涌现并完善。但是,传统头颅模型仿真系统与现代虚拟仿真教学系统各有优缺点。如何将现有智慧实验教学手段合理融入到口腔医学教学体系中,最大程度发挥不同教学工具的优势,是口腔教学工作人员必须深入思考的关键问题[36-38]。例如,从口腔医学生成长的系统规划方面考虑,可以利用数字化口腔模拟器可大量反复训练的优势,通过基本形状窝洞预备模块,对一、二年级未进入口腔专业课程学习的学生进行双手协调性、手脚协调性、神经肌肉控制能力、手部灵巧度和镜像操作能力的锻炼;对三年级开始口腔基础课程学习的学生,可以利用数字化口腔模拟器进行窝洞制备、全冠预备等训练,帮助学生对相关临床操作获得直观认识;对于四年级开始口腔临床专业课的学生,则可以利用传统仿真头颅模型或交互式仿真头颅模型,在更接近临床实际的情况下进行基本操作技能的训练。
4.结语
随着计算机技术的高速发展,各种智慧教学手段的出现为口腔仿真模拟实践教学提供了新的选择。然而,目前虚拟仿真等智慧教学工具只能作为辅助手段,而无法完全取代传统依赖头颅模型的实践教学方式。教学工作人员需要通过虚实结合的方式,将传统实践教学手段与虚拟教学手段有机融合,将多平台、多技术联合应用,形成优势互补的教学新模式,才能最大程度拓展教学资源、提高实践教学质量。
