变负荷系数对实船航速修正的影响分析
2023-07-22胡琼,徐杰,张旭
胡 琼,徐 杰,张 旭
(中国船舶科学研究中心, 江苏 无锡 214082)
0 引 言
船舶的设计航速通常是以风平浪静为条件进行预报的。而实船试航时,现实的风、浪、流、水温和水密度、水深等环境因素和船舶装载状态会在很大程度上影响实船测速试验结果。在测速试验中,为了准确评估船舶的航速,必须修正环境因素和装载状态对实测航速和功率的影响[1]。
ISO15016:2015[2]是国际海事组织(IMO)指定的实船测速试验标准之一。该方法基于直接功率法,首先计算风、波浪、水温和水密度偏差等环境影响引起的总阻力增加,乘以对水航速,并考虑变负荷系数、推进效率系数等,得到修正环境影响后的螺旋桨收到功率和轴转速。然后修正流和浅水效应对航速的影响,再根据海军部系数修正排水量对螺旋桨收到功率的影响,最终得到船舶在当前装载状态下、无风、无浪、无流、15℃深水中的航速功率点[3]。变负荷系数ξP,ξn,ξV是基于直接功率法的测速试航数据分析过程中的3 个关键参数,可通过变负荷试验得到。其中,ξP为推进效率与阻力增加之间的相关性,ξn为螺旋桨轴转速与功率增加之间的相关性,ξV为螺旋桨轴转速与航速变化之间的相关性。在航速修正过程中,这3 个参数可采用参考值,即ξP=0,ξn=0.20,ξV=–0.33,也可以根据船模变负荷试验计算得到。
为了评估变负荷系数对实船航速修正结果的影响,基于某型散货船7 艘系列船的实船测速试验数据,使用变负荷系数参考值以及根据船模试验计算得到的变负荷系数值进行航速修正,并对结果进行比较,为船舶测速试航提供参考。
1 变负荷试验
船舶在理想环境下航行时,螺旋桨收到功率和轴转速等体现负荷状态的数据属于实船自航点条件数据。阻力对船舶航行的影响体现在螺旋桨的负荷状态方面,导致螺旋桨处于轻载或重载状态。因此,变负荷试验实质上是模拟固定的螺旋桨负荷状态,预估船舶性能的自航试验[4]。
船模自航试验是分析研究各种推进效率成分的重要手段,分为纯粹自航法和强制自航法2 种。纯粹自航法是事先在船模上扣除船模速度Vm时的摩擦阻力修正值FD,然后调节螺旋桨的转速,使其发出的推力恰能克服阻力(Rm–FD),保持船模速度与拖车速度Vm相等[5]。由于FD在试验中不能改变,调节比较困难,因此我国的船模试验水池一般都采用强制自航法。
强制自航法是船模在螺旋桨推力T和强制力z的共同作用下进行的自航试验,利用阻力仪调节强制力z,使船模的速度和拖车速度保持相等[5]。对某一选定的船模试验速度Vm,一般需要进行5 次强制力不同的自航试验,每次尽可能保持同一速度Vm。对不同的强制力,为了维持船模速度Vm不变,要求螺旋桨推力T、转速n和扭矩QB随之变化。
对于少数采用纯粹自航法进行自航试验的水池,需补充进行变负荷试验。变负荷试验由至少4 个自航试验航次组成,每一航次在保持船模速度不变的情况下在不同螺旋桨轴转速下进行。螺旋桨轴转速按以下方式选择:
式中:ΔR为阻力增加值,N;Rid为阻力试验获得的真实速度下的实尺度阻力,N;FX为变负荷试验期间测得的外部拖力,N;FD为常规自航试验中表面摩擦修正力,N;λ为尺度因子;ρS为实尺度的水密度,kg/m3;ρM为模型试验中的水密度,kg/m3。
2 变负荷系数
2.1 变负荷系数的涵义
阻力增加影响螺旋桨负荷,进而影响船舶的推进效率。ISO15016:2015 采用直接功率法,考虑风、浪、水温和密度等环境条件对船舶航行时的阻力和推进性能的影响,对实测功率、航速和转速进行修正。在直接功率法中,假定推进效率随增阻线性变化,即
式中:ηDms为试航条件下的推进效率系数;ηDid为理想条件下的推进效率系数;ξP是反映推进效率与增阻之间关系的变负荷系数,由变负荷试验得到;ΔR为阻力增加,N;R理想条件下的阻力,N。
由此可推导出修正后的理想条件下的螺旋桨收到功率,如下式:
式中:PDid为理想条件下的螺旋桨收到功率,kW;PDms为试航条件下的螺旋桨收到功率,kW;ΔR为总阻力增加,N;VS为船舶对水速度,m/s;ηDid为理想条件下的推进效率系数;ξP为表示推进效率与阻力增加之间相关性的变负荷系数。
螺旋桨轴转速可按照下式进行修正:
据此得出修正到理想条件下的螺旋桨轴转速为:
式中:nms为测得的螺旋桨轴转速,r/min;nid为修正后的螺旋桨轴转速,r/min;PDid为理想条件下的螺旋桨收到功率,kW;PDms为试航条件下的螺旋桨收到功率,kW;ξn为表示螺旋桨轴转速与功率增加之间相关性的变负荷系数;ξV是表示螺旋桨轴转速与航速变化之间相关性的变负荷系数;VS为船舶对水速度,m/s;ΔV为由于浅水引起的船舶失速,m/s。
2.2 变负荷系数ξP 的获取方法
理想条件下的推进效率系数ηDid可由标准拖曳水池试验按航速VS插值得到。将变负荷试验得到的推进效率ηDms与常规自航试验得到的ηDid之间的比值,按增阻分数ΔR/Rid(以理想条件的Rid为分母)绘图。变负荷系数ξP是使用最小二乘法对数据点进行拟合得到的通过(0,1)点的线性曲线的斜率,如图1 所示。

图1 使用最小二乘法拟合ηDms/ηDid 与ΔR/Rid 曲线得到ξP 的示例Fig. 1 Example of the approximate ηDms/ηDid -ΔR/Rid curve fitted by the least squares method
2.3 变负荷系数ξn 的获取方法
将对螺旋桨轴转速的影响Δn/nid按ΔPD/PDid(以理想条件的nid和PDid为分母)绘图。变负荷系数ξn是使用最小二乘法对数据点进行拟合得到的通过(0,0)点的线性曲线的斜率,如图2 所示。
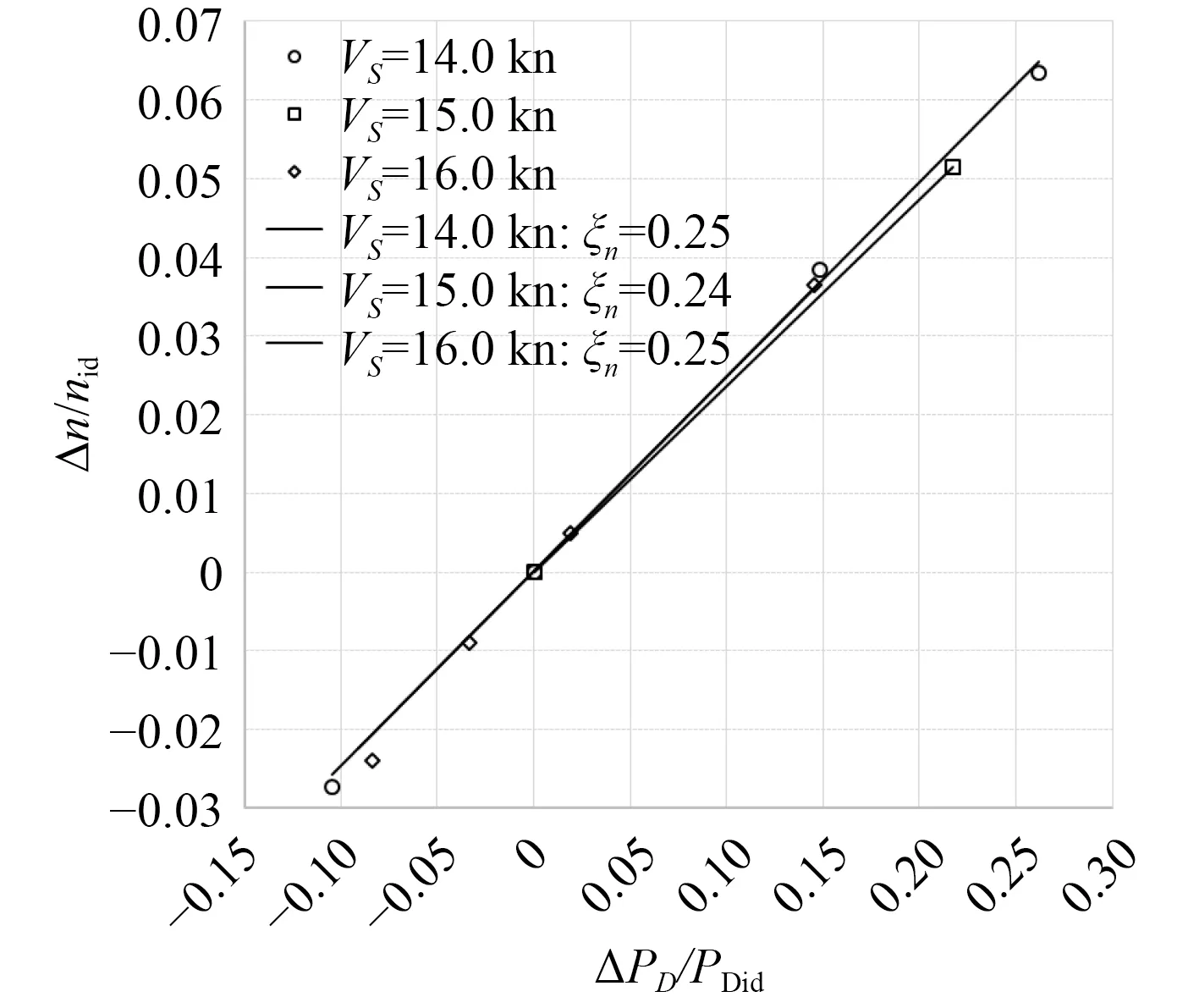
图2 使用最小二乘法拟合Δn/nid 与ΔPD/PDid 曲线得到ξn 的示例Fig. 2 Example of the approximate Δn/nid - ΔPD/PDid curve fitted by the least squares method

图3 负荷变化和航速对螺旋桨轴转速的影响的示例Fig. 3 Example of the effect of load variation and ship's speed on propeller shaft speed
2.4 变负荷系数ξV 的获取方法
变负荷试验得到的螺旋桨转速n随阻力Rid+ΔR线性变化。首先将变负荷试验得到的螺旋桨转速n按阻力Rid+ΔR的绘图。假定所有航速下的n与(Rid+ΔR)的关系线都相互平行且通过静水自航试验获得的数据点(Rid,n)。这些具有恒定阻力的线的交点给出了螺旋桨转速与航速的关系。变负荷系数ξV是使用最小二乘法拟合得到的Δn/n-ΔV/V曲线的斜率。
3 变负荷系数对实船航速修正的影响分析
为评估变负荷系数对实船航速修正结果的影响,基于某型散货船7 艘系列船的实船测速试验数据,使用变负荷系数参考值以及根据船模试验计算得到的变负荷系数值进行航速修正,并对结果进行比较。
3.1 系列船的试航环境条件
该型散货船7 艘系列船均在压载状态下开展测速试航。试航时的环境条件状态如表1 所示。
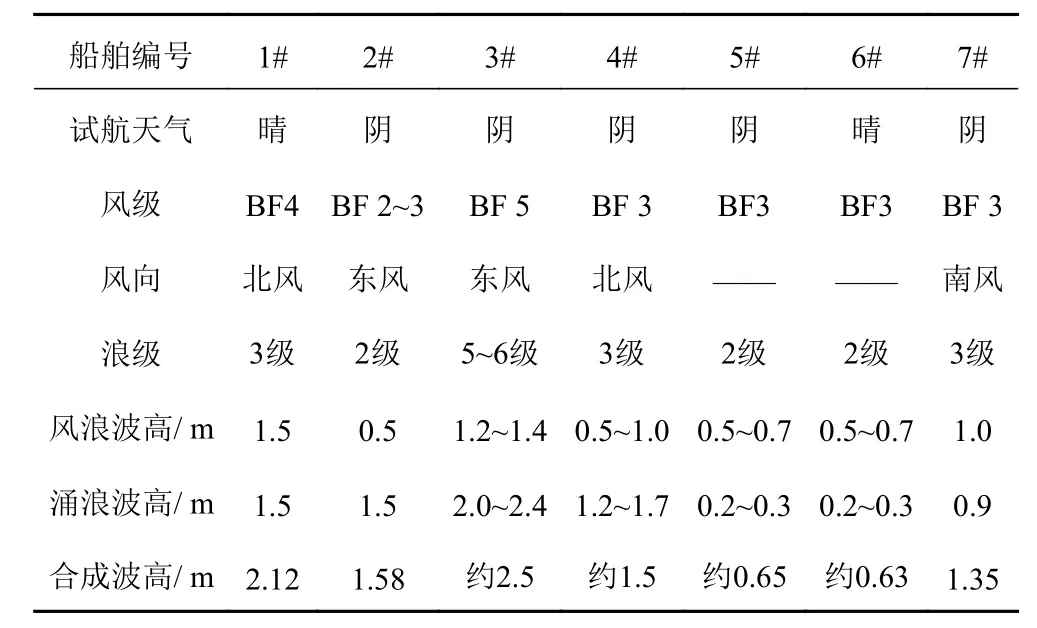
表1 系列船的试航环境条件Tab. 1 Sea trial environmental conditions of series ships
3.2 用于分析的变负荷系数值
该型散货船在挪威海事技术研究所(MARINTEK)和中国船舶科学研究中心(CSSRC)均开展了船模试验。2 家水池单位均提供了变负荷系数。因此,本次分析基于2 家水池单位提供的变负荷系数值以及参考值(即ξP= 0,ξn= 0.20,ξV= -0.33)开展。用于分析的变负荷系数值如表2 所示。
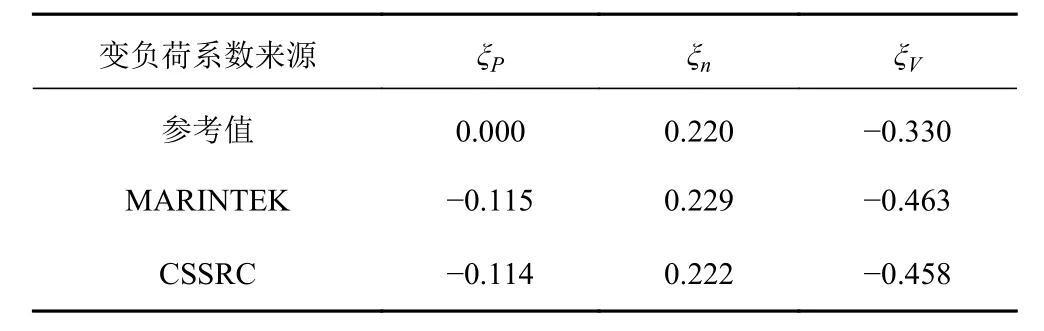
表2 用于分析的变负荷系数值Tab. 2 The values of load variation coefficients for analysis
3.3 变负荷系数对实船航速修正的影响分析
根据ISO 15016:2015,采用表2 所列的3 组变负荷系数值,对该型散货船7 艘系列船进行了实船航速修正,得到了修正后的船舶EEDI 参考航速。为了评估变负荷系数对实船航速修正的影响,首先计算使用不同变负荷系数进行航速修正后的航速修正量,即
式中:VS为船舶实测航速,kn;Vref为使用不同来源的变负荷系数进行航速修正后得到的船舶EEDI 参考航速,kn;ΔV表示使用不同来源的变负荷系数进行航速修正后的航速修正量,kn。
将船模水池试验获得的变负荷系数对应的航速修正量与变负荷系数参考值对应的航速修正量相减,得到两者之间的航速修正偏差,即
式中:ΔVref为使用变负荷系数参考值进行航速修正后的航速修正量,kn;ΔVref_ModelTest为使用船模试验获得的变负荷系数进行航速修正后的航速修正量,kn;σ为使用船模试验获得的变负荷系数和使用变负荷系数参考值得到的航速修正量之间的偏差,kn。
表3 为该型散货船7 艘系列船使用不同来源的变负荷系数进行航速修正后对应的航速修正偏差。
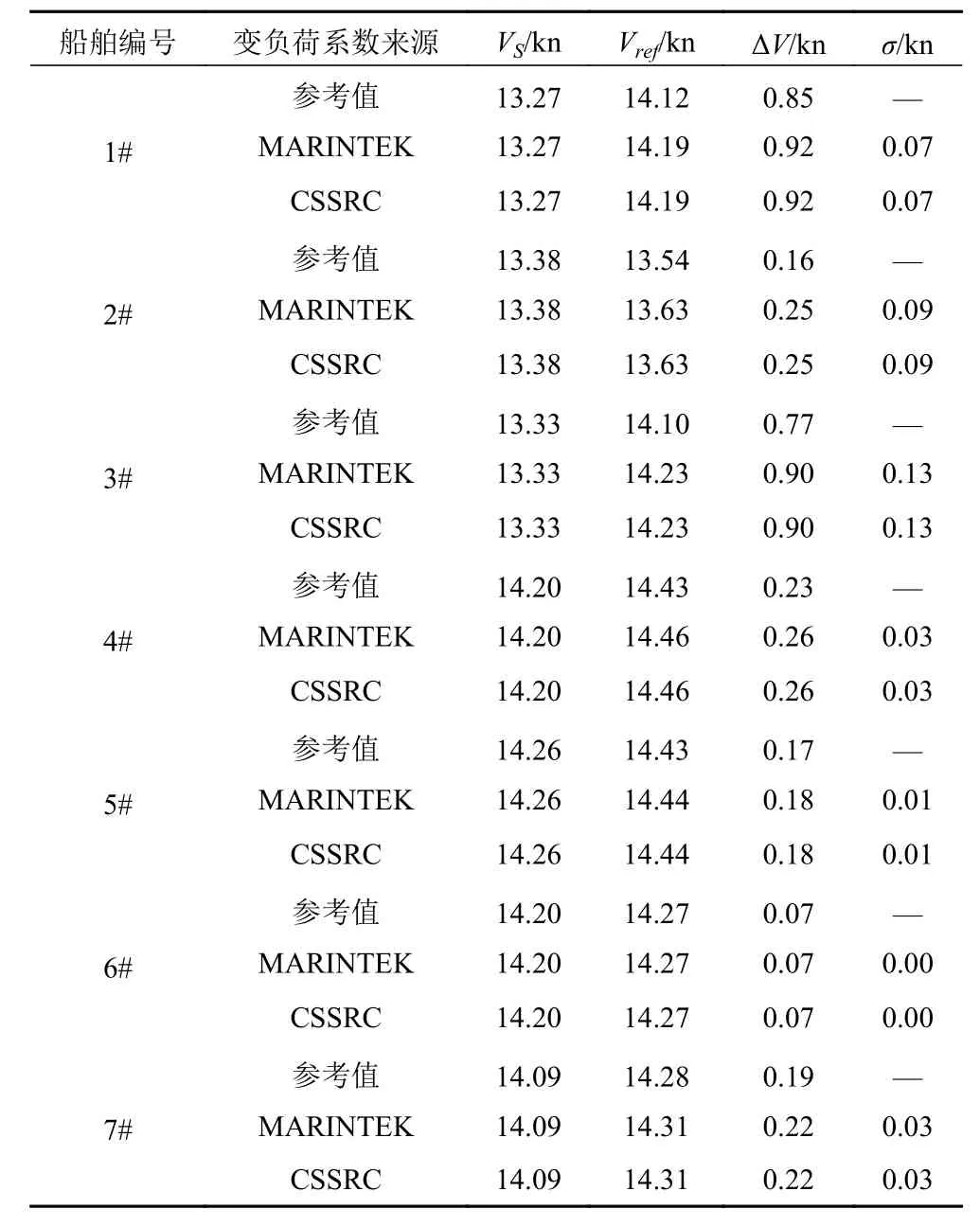
表3 使用不同变负荷系数对应的航速修正偏差Tab. 3 Correction deviation of speed using different load variation coefficients
由表3 可知,使用MARINTEK 提供的变负荷系数,与使用CSSRC 提供的变负荷系数,最终航速修正结果一致。而7 艘船使用船模水池试验得到的变负荷系数进行航速修正后,与使用变负荷系数参考值得到的修正结果相比,航速修正量的偏差在0~0.13 kn。从变负荷系数的内涵考虑,造成航速修正量偏差的来源,应该是7 艘船的试航海况不同。因此,进一步分析了使用水池试验得到的变负荷系数与使用变负荷系数参考值进行航速修正后对应的航速修正偏差,与以风浪和涌浪的合成波高为表征的海况之间的关联性,如表4和图4 所示。
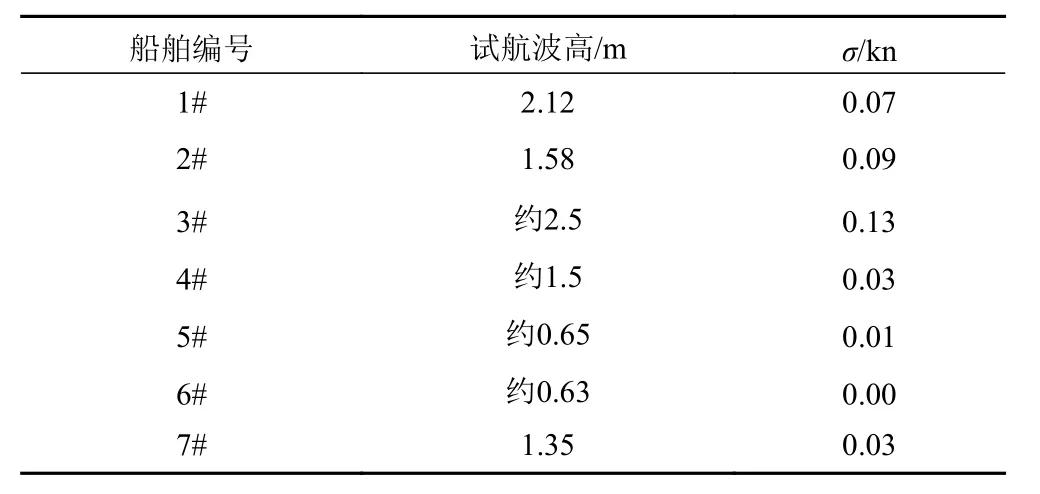
表4 计及海况影响的变负荷系数对实船航速修正的影响Tab. 4 Influence of load variation coefficients on correction of ship trial speed with considering the effects of sea conditions

图4 变负荷系数对实船航速修正的影响程度与海况之间的关联性Fig. 4 Correlation between the influence level of load variation coefficients on speed correction and sea state
通过以上分析,可得出如下结论:
1)对该型散货船7 艘系列船的计算结果表明,使用水池试验得到的变负荷系数进行航速修正后,与使用变负荷系数参考值的修正结果相比,航速修正量的偏差在0~0.13 kn;
2)使用水池试验得到的变负荷系数进行航速修正,与使用变负荷系数参考值得到的航速修正结果相比,海况越恶劣,最终航速修正量的偏差越大。当海况低于3 级时,两者修正后得到的EEDI 参考航速基本一致。
4 结 语
针对ISO 15016:2015 提供的直接功率法中的3 个关键参数——变负荷系数ξP,ξn,ξV,基于某型散货船7 艘系列船的实船测速试验数据,分析了变负荷系数对实船航速修正结果的影响。使用水池试验获得的变负荷系数进行航速修正,与使用变负荷系数参考值相比,航速修正量能提高0~0.13 kn。而且,试验时的海况越恶劣,两者之间的航速修正量的偏差越大;当试验海况在3 级及以下时,两者之间的航速修正量偏差很小。因此,建议在开展实船EEDI 测速试航时,尽可能使用水池试验获得的变负荷系数进行试航航速修正,以获得更准确的航速修正结果。